Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ).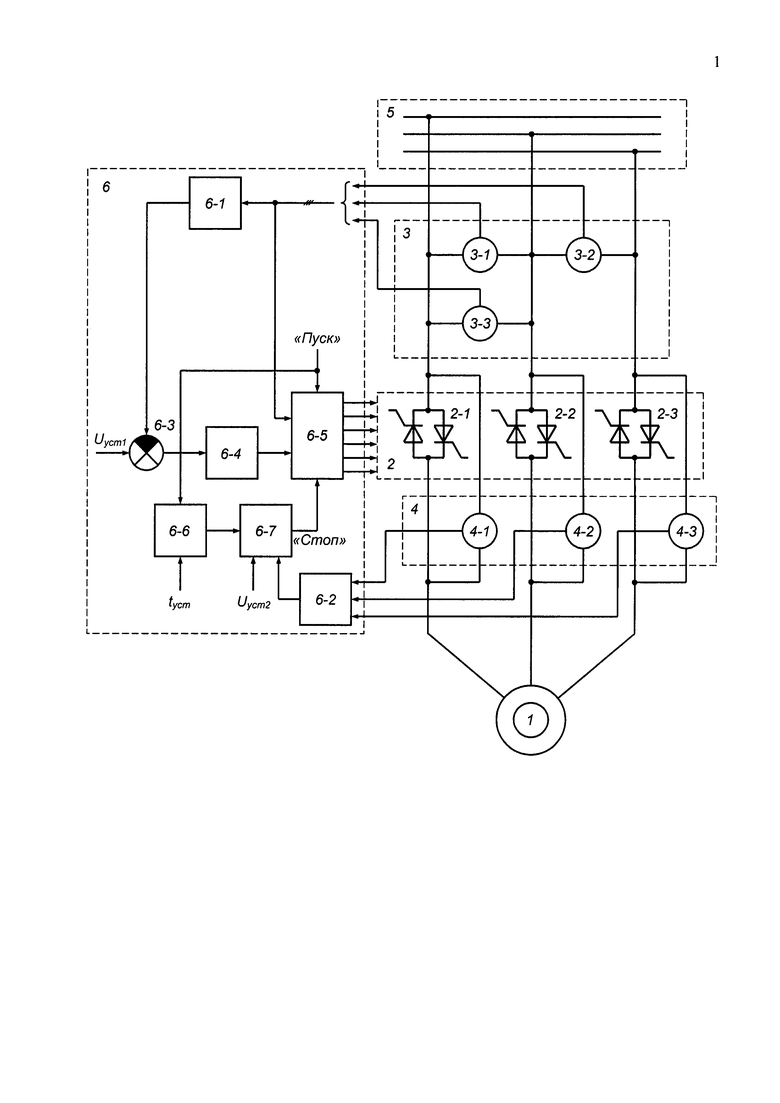 Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
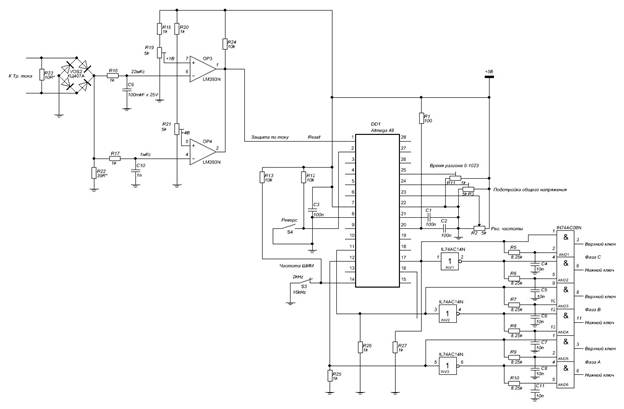
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега.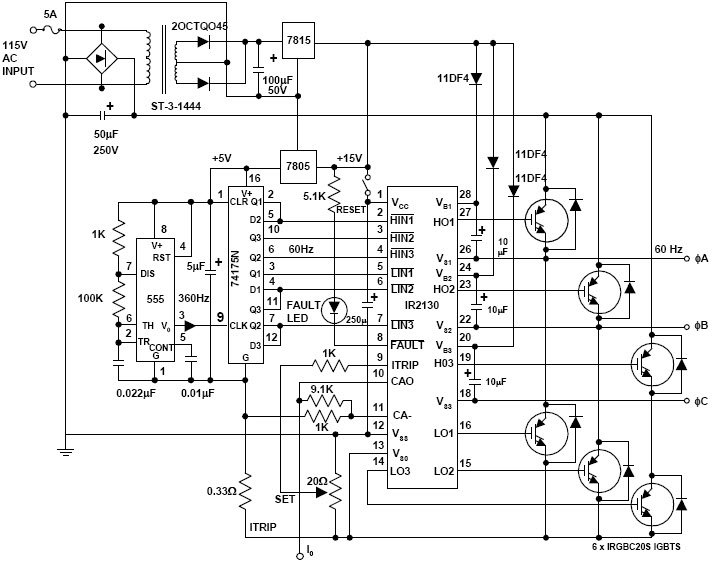 При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое «вечернее» видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Управление оборотами асинхронного двигателя 220в. Регулировка оборотов асинхронного двигателя
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.


Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
 Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область примененияРегулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналовСигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно.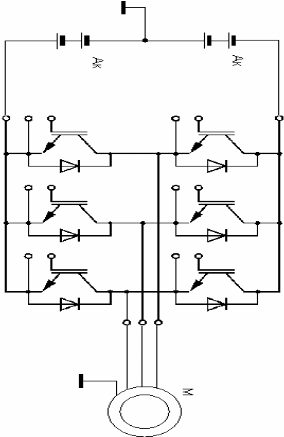 Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.

Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис.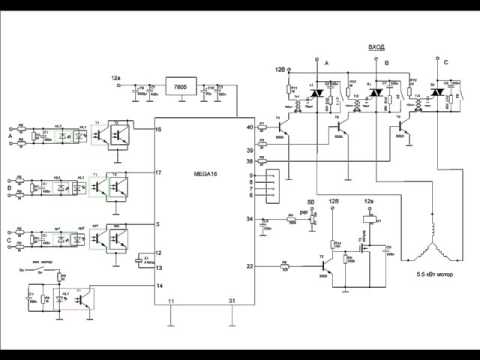 №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
№9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Декор дня рождения своими руками
Закрыть… [X]
Такую коробку для вещей можно использовать на кухне, ванной или других комнатах для декора помещения своими руками.
Ковбойские остроносые сапогиПринцип работы самодельного замка заключается в следующем. В одной его половине находится постоянный магнит. а в другой — металлическая пластина. Одна из них крепится к двери. Вторая, с удаленной металлической пластиной, оснащается герконом КЭМ-1 и крепится к дверной коробке. Если дверь находится в закрытом положении, две части замка прижимаются, магнит оказывает действие на геркон, замыкая его контакты. Если же дверь открывается, магнит уходит, и контакты геркона размыкаются.
Батарея, системный блок компьютера, даже блок питания для ноутбука — это все лучшие друзья. Я уже молчу, про такие хорошие грелки, как мы с мужем.
Берите наполнитель и набивайте куклу. Когда полностью равномерно распределите набивку, зашейте изделие. Ручки необходимо пришивать к туловищу практически около самой шеи.
Из одной паллеты, отшлифованной, пропитанной и лакированной, получается садовый столик вроде журнального, слева на рис. Если в наличии есть пара, из них буквально за полчаса можно сделать настенный рабочий стол-стеллаж, в центре и справа. Цепи для него также можно сплести самому из мягкой проволоки, обтянутой трубкой из ПВХ или, лучше, термоусаживаемой. Для полного поднятия столешницы мелкий инструмент укладывают на полку настенной паллеты.
Ну а если стеклянную чашу, вазу, конфетницу, сосуд для пунша или обыкновенные бокалы наполнить водой, разбросав на дне морскую гальку, и отпустить в «свободное плавание» свечи-таблетки, получим волшебную подсветку для романтического Нового года. Для более интересного и неожиданного эффекта можно поэкспериментировать с цветом воды. Как производится установка шипов на резину?
Как производится установка шипов на резину?
Игрушки ручной работы для детей — это красиво, дешево и приятно. Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Для основания такой конструкции можно использовать толстую фанеру, а для её верхней части – поликарбонат. Найти в сети солнечные батареи сегодня тоже не проблема.
Внимание! При стыковке панелей не стоит прилагать слишком большие усилия, вы можете повредить место стыка.
Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Для изготовления кормушки своими руками нам потребуется:
Расчет древесины. Доски, носящие название клепки, имеют двояковыпуклые стороны для придания бондарному изделию выпуклости. Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Как плести браслеты из шнурков
Тот факт, что большинство новогодних костюмов для детей дошкольного возраста легко шьются на основе комбинезона, может значительно сузить и облегчить творческий поиск. Если научится шить комбинезон — основу для новогоднего костюма и придумать (почерпнуть), смастерить своими руками декоративные элементы к нему, то можно сделать удивительные и довольно интересные модели новогодних нарядов для детей. Главное заранее все продумать до мелочей, вооружится знаниями по теме — чтобы результат труда приятно удивил и порадовал всех.
Проектирование шкафа-купе
Картинки
Подарок маме на день рождения своими руками фото инструкция
Похожие новости .
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Блок управления и регулирования скорости вращения электродвигателей изменением фазного напряжения
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
На рисунке схема подключения блока регулятора РВС 207.
Регулятор скорости асинхронного двигателя
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме.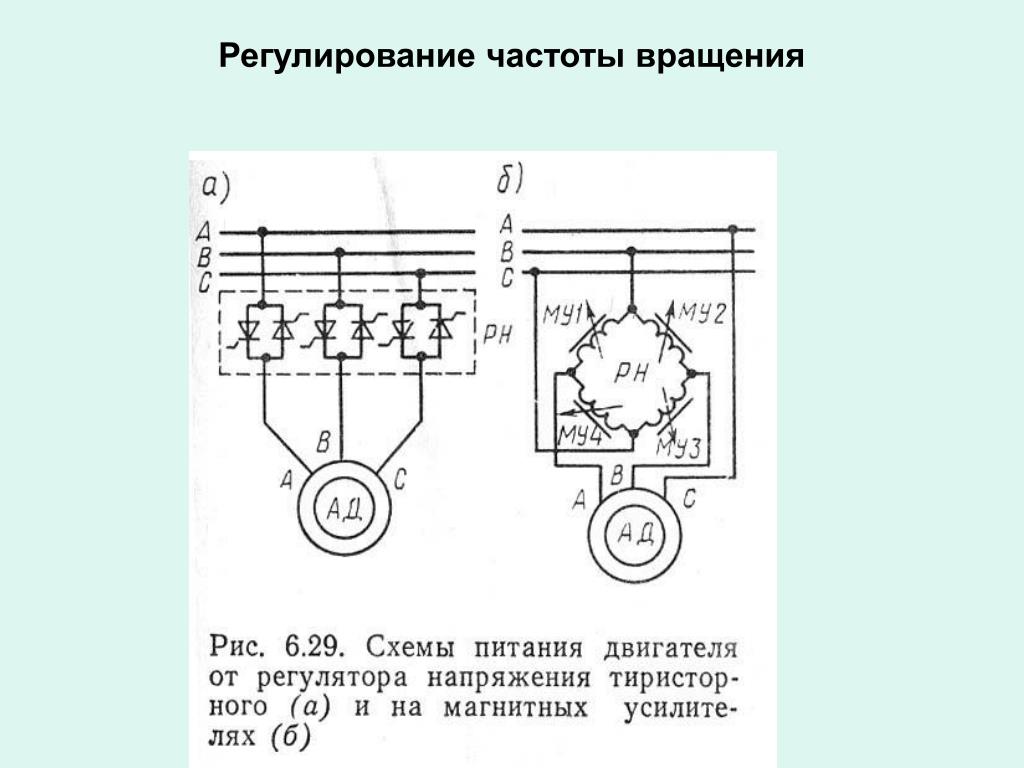 С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация : для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Схема подключения частотного преобразователя: звезда — треугольник
Перейти в каталог продукции: Частотные преобразователи
Для управления трехфазным асинхронным двигателем применяются частотные преобразователи (инверторы), рассчитанные на однофазное или трехфазное входное напряжение. Инверторы обеспечивают возможность мягкого запуска двигателя и регулировки частоты оборотов, защиту от перегрузок. Кроме этого, частотник позволяет подключать трехфазные двигатели к однофазным сетям без потерь мощности. Преобразователи частоты трансформируют напряжение электросети частотой 50 Гц в импульсное с частотой от 0 Гц до 1 кГц.
Кроме этого, частотник позволяет подключать трехфазные двигатели к однофазным сетям без потерь мощности. Преобразователи частоты трансформируют напряжение электросети частотой 50 Гц в импульсное с частотой от 0 Гц до 1 кГц.
Внимание: представленная схема является общей. При подключении используйте схему из инструкции по эксплуатации!
Однофазные преобразователи частоты рассчитаны на входное напряжение 1 фаза 220 В и на выходе формируют трехфазное напряжение 220 В заданной частоты. Иными словами, однофазный инвертор обеспечивает трехфазное питание асинхронного двигателя от бытовых электросетей. При использовании однофазных частотных преобразователей, в клеммной коробке двигателя, клеммы подключают по схеме «треугольник» (Δ). При подключении трехфазного асинхронного двигателя к однофазной сети 220 В, при использовании конденсаторной схемы, неизбежна большая потеря мощности. В то время как, при пользовании однофазного частотного преобразователя, подключаемого в двигателю по схеме «треугольник» (Δ), потерь мощности не происходит.
Более совершенные трехфазные преобразователи частоты работают от промышленных трехфазных сетей с напряжением 380 В, 50 Гц. Частота напряжения на выходе – от 0 Гц до 1кГц. Трехфазные инверторы подключают по схеме «звезда» (Y).
Трехфазный частотный преобразователь подключают асинхронному двигателю по схеме звезда:
Однофазный частотный преобразователь подключают асинхронному двигателю по схеме треугольник:
Для ограничения пускового тока и снижения пускового момента при пуске асинхронного двигателя мощностью более 5 кВт может применяться метод переключения «звезда-треугольник». В момент пуска напряжение на статор подключается по схеме «звезда», как только двигатель разгонится до номинальной скорости, производится переключение питания на схему «треугольник». Пусковой ток при переключении втрое меньше, чем при прямом пуске двигателя от сети. Этот метод пуска оптимально подходит для механизма с большой маховой массой, если нагрузка набрасывается после разгона.
Этот метод пуска оптимально подходит для механизма с большой маховой массой, если нагрузка набрасывается после разгона.
Способ пуска переключением «звезда-треугольник» можно использовать только для двигателей, имеющих возможность подключения по обеим схемам. При пуске наблюдается уменьшение пускового момента на треть от номинального. Если переключение произойдет до того, как двигатель разгонится, ток увеличится до значений, соответствующих току прямого пуска.
При пуске переключением «звезда-треугольник» неизбежны резкие скачки токов, в отличие от плавного нарастания при прямом пуске. В момент переключения на «треугольник» на двигатель не подается напряжение и скорость вращения может резко снизится. Для восстановления частоты оборотов требуется увеличение тока.
Перейти в каталог продукции: Частотные преобразователи
Преобразователь частоты для однофазного двигателя
Помимо распространенных 3-х фазных асинхронных двигателей, на рынке предлагают однофазные моторы. Чаще всего ими являются насосы и вентиляторы. Самые популярные агрегаты в промышленности и в быту. И тут возникает вопрос? Как же ими управлять и регулировать скорость. Способов великое множество. Но самый эффективный, это когда подключают преобразователь частоты для однофазного двигателя.
Из этой статьи вы узнаете:
Однофазный асинхронный двигатель
Способы подключения мотора
Подключение преобразователя частоты и однофазного двигателя
Всем привет! С вами Гридин Семён, и в этом посте мы поговорим с вами о нюансах управления асинхронными однофазными двигателями. Какой способ управления лучше? Разберём такой вопрос — частотное управление двигателем более подробно.
Однофазный асинхронный двигатель
Наибольшее применение такие моторы нашли в быту и малом бизнесе. Они необходимы там, где нет трёхфазной сети. Мощность их ограничивается лишь частотой сети. Сами по себе аппараты маломощные, в диапазоне от 500 Ватт до 2 килоВатт.
Принцип работы однофазного двигателя заключается в смещении обмоток в пространстве относительно друг друга. Ключевым моментом является сдвиг фазы в обмотках на 120 градусов. Главным «фазосдвигателем» у нас является конденсатор. Как правило, он подключён последовательно в цепи статорной обмотки.
По конструкции моторы могут различаться. Так что, не к любому можно подключить преобразователь частоты, нужно обращать внимание прежде всего на схему подключения обмоток. Двухфазный двигатель с рабочей и пусковой обмоткой точно не сможет запуститься, совсем другой принцип работы. Мы к этому ещё вернёмся…
Способы подключения мотора
А теперь давайте рассмотрим несколько способов подключений:
- конденсаторный способ;
- частотный способ;
- фазовое управление с помощью симистора;
Какой из способов лучше всего? Знаете, всё зависит от задачи, которую нужно решить… А так на вкус и цвет, сами знаете…
Если вы мало знакомы с преобразователем частоты, можете ознакомиться в статье «Чего вы не знаете о преобразователе частоты?»
Конденсаторный способ подключений
Бюджетное подключение трехфазных моторов к однофазной сети. Просто цепляем конденсатор последовательно в цепи обмотки и превращаем аппарат из трехфазного в однофазный. Вот схема:
Сп — пусковой конденсатор, а Ср — рабочий конденсатор. Как подбирать ёмкость в этом случае я расписывать не буду. В просторах интернета есть полно информации по этому поводу.
Фазовое управление с помощью симистора
Это один из самый старых способов управления. Две обмотки двигателя подключаются параллельно, одна из них с конденсатором. К точкам обмоток соединяем симисторный регулятор. Их актуальность, по-моему мнению, ещё не пропала. Лучше всего использовать для не тяжёлых нагрузок (вентиляторы, насосы).
Важно! Учитывайте, что сим. блоки в основном предназначены для активной нагрузки. Так как мотор — это индуктивная нагрузка, поэтому активный ток делим примерно на 10.
 Если ток активной нагрузки равен 50, то индуктивный будет 5.
Если ток активной нагрузки равен 50, то индуктивный будет 5.На выходе устройства формируется напряжение сетевой частоты 50 Гц и настраивается среднеквадратичное число. Таким образом мы меняем время открытого состояния симистора за период следования напряжения. Единственный недостаток: момент на валу падает относительно снижения напряжения. Вот вам пример Autonics SPK1:
Входы для регулировки скорости универсальные. Сюда можно подключить и потенциометр 1 кОм, и датчик с токовым сигналом 4-20 мА, и напряжение 0-5 В.
Частотный способ
О популярности преобразователя частоты нет смысла говорить. Так как это устройство давно известно всем. Частотный способ является основным в нашем 21 веке. Скорость регулируется с помощью ШИМ-модуляции. Достаточно сложный девайс, требующий отдельной статьи. По входному напряжению существуют как и 380 В, так и 220В. Но что же получается по выходу?
На рынке есть готовые варианты и на однофазный, и на трёхфазный электродвигатель. Просто нужно подобрать схемное решение.
Но, бывают случаи когда ПЧ с однофазным выходом не по карману. Или у вас на полке лежит трёхфазный ПЧ. Давайте рассмотрим вариант подключения мотора к преобразователю частоты.
В такой схеме есть ряд существенных недостатков:
- Запуск двигателя происходит при минимальной частоте 30 Гц;
- Частоту ниже 30 Гц можно регулировать, но не рекомендуется, очень вредно для движка;
- Есть нюанс с настройкой пускового напряжения, требуется немного загрублять параметр;
Для решения вопроса с подключением двух устройств поможет нам обычный дроссель. Катушка индуктивности поможет нам подавить ёмкость в схеме, таким образом давая возможность частотнику спокойно подавать синусоиду на движок. Да, вот схема:
Всё элементарно, правда. Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Производителей ПЧ в мире очень много. Поэтому из настроек я могу направить вас примерно и в общих чертах, если будут возникать проблемы с подключениями. Основная мысль заключается в том, что при пуске двигателя минимальное напряжение и частоту поднять вверх. Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
И еще рекомендую ограничить минимальную частоту на 30 Гц, чтобы не допустить запуска вхолостую и перегрева. Двигатель начинает сильно греться, при пуске на низких частотах.
На этом у меня всё, друзья…
Мне очень нравится кататься на велосипеде. Ещё больше — модернизировать, добавлять что-то новое и интересное. Я совсем недавно в просторах интернета нашёл комплект электромотора для заднего колеса. Комплекты существуют, как и для переднего колеса, так и для заднего:
Загорелся идеей поставить и на свой велобайк. Может кто сталкивался? Кто-то ставил? Хочу увидеть ваше мнение… Пишите в комментариях.
Надеюсь моя статья помогла вам определиться с выбором подключения однофазного двигателя? Если что-то не дописал, напишите в комментариях, исправлю…)
P.S. Небольшой анонс следующей статьи:
Широкая доступность фотоустройств породила новую проблему — потребность в эффективных инструментах цифрового монтажа. На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
Спасибо за то, что читаете мои статьи! Всего вам доброго!!
С уважением, Гридин Семён
Частотные преобразователи. Работа и устройство. Типы и применение
Ротор электродвигателя начинает свое вращение с помощью электромагнитных сил от вращающегося магнитного поля, вызванного обмоткой якоря. Число оборотов определяется частотой тока в сети. Стандартное значение частоты тока составляет 50 герц. Это означает, что 50 периодов колебаний совершается за 1 секунду. В минуту число колебаний составит 50 х 60 = 3000. Значит, ротор будет вращаться 3000 оборотов в минуту.
Если научиться изменять частоту тока, то появится возможность регулировки скорости двигателя. Именно по этому принципу действуют частотные преобразователи.
Современное исполнение преобразователей частоты выглядит в виде высокотехнологичного устройства, состоящего из полупроводниковых приборов, совместно с микроконтроллером электронной системы. С помощью этой системы управления изменяются важные параметры электродвигателя, например, число оборотов.
Изменить скорость привода можно и с помощью механического редуктора шестеренчатого типа, либо на основе вариатора. Но такие механизмы имеют громоздкую конструкцию, их нужно обслуживать. С использованием частотника (инвертора) снижается расход на техническое обслуживание, повышается функциональность привода механизма.
Виды
По конструктивным особенностям частотные преобразователи делятся:
- Индукционные.
- Электронные.
Электродвигатели асинхронного типа с фазным ротором, подключенные в режим генератора, представляют подобие индукционного частотного преобразователя. Они имеют малые КПД и эффективность. В связи с этим такие виды преобразователей не нашли популярности в использовании.
Электронные виды частотников дают возможность плавного изменения оборотов электродвигателей.
При этом реализуются два возможных принципа управления:
- По определенной зависимости скорости от частоты тока.
- По способу векторного управления.
Первый принцип самый простой, но не совершенный. Второй принцип применяется для точного изменения оборотов двигателя.
Конструктивные особенностиРис. 1
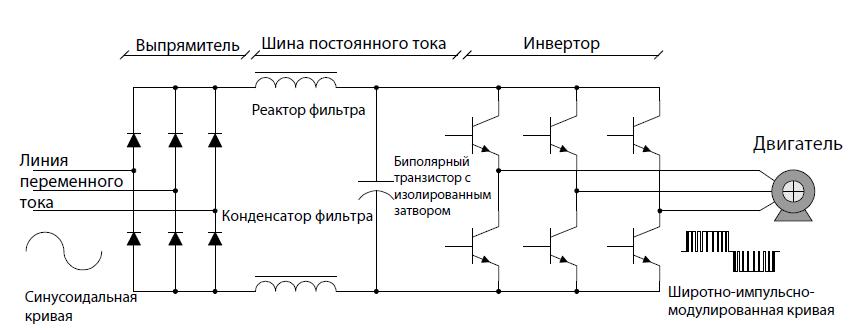
Частотные преобразователи имеют в составе основные модули:
- Выпрямитель.
- Фильтр напряжения.
- Инверторный узел.
- Микропроцессорная система.
Все модули связаны между собой. Действие выходного каскада (инвертора) контролирует блок управления, с помощью которого меняются свойства переменного тока. Частотный преобразователь для электромотора имеет свои особенности. В его состав входит несколько защит, управление которыми осуществляется микроконтроллером. Например, проверяется температура полупроводников, работает защита от превышения тока и короткого замыкания. Частотник подключается к сети питания через устройства защиты. Для запуска электродвигателя не нужен магнитный пускатель.
ВыпрямительЭто первый модуль, по которому проходит ток. Он преобразует переменный ток в постоянный, благодаря полупроводниковым диодам. Особенностью частотника является возможность его питания от однофазной сети. Разница в конструкции состоит в разных типах выпрямителей.
Если мы говорим про однофазный частотник для двигателя, то нужно использовать в выпрямителе четыре диода по мостовой схеме. При трехфазном питании выбирается схема из шести диодов. В итоге получается выпрямление переменного тока, появляется два полюса: плюс и минус.
Фильтр напряженияИз выпрямителя выходит постоянное напряжение, которое имеет значительные пульсации, заимствованные от переменного тока. Для их сглаживания используют такие элементы, как электролитический конденсатор и катушка индуктивности.
Катушка имеет много витков, и обладает реактивным сопротивлением. Это дает возможность сглаживать импульсы тока. Конденсатор, подключенный к двум полюсам, имеет интересные характеристики. При прохождении постоянного тока он в силу закона Киргофа должен быть заменен обрывом, как будто между полюсами ничего нет. При прохождении переменного тока он должен быть проводником, то есть, не иметь сопротивления. В результате доля переменного тока замыкается и исчезает.
Инверторный модульЭто узел, имеющий наибольшую важность в преобразователе частоты. Он изменяет параметры тока выхода, состоит из шести транзисторов. Для каждой фазы подключены по два транзистора. В каскаде инвертора применяются современные транзисторы IGBT.
Если изготавливать частотные преобразователи своими руками, то необходимо выбирать элементы конструкции, исходя из мощности потребления. Поэтому нужно сразу определить тип электродвигателя, который будет питаться от частотника.
Микропроцессорная системаВ самодельной конструкции не получится добиться таких параметров, имеющихся у заводских моделей, так как в домашних условиях сделать управляющий модуль сложно. Дело не в пайке деталей, а в создании программы для микроконтроллера. Простой способ – это сделать управляющий блок, которым можно регулировать обороты двигателя, осуществлять реверс, защищать двигатель от перегрева и перегрузки по току.
Чтобы изменить обороты мотора, нужно применить переменное сопротивление, подключенное к вводу микроконтроллера. Это устройство подает сигнал на микросхему, которая производит анализ изменения напряжения и сравнивает его с эталоном (5 вольт). Система действует по алгоритму, который создается до начала создания программы. По нему действует микропроцессорная система.
Приобрели большую популярность управляющие модули Siemens. Частотные преобразователи этой фирмы надежны, могут применяться для любых электродвигателей.
Принцип действияОснова работы инвертора состоит в двойном изменении формы электрического тока.
Напряжение подается на блок выпрямления с мощными диодами. Они удаляют гармонические колебания, однако оставляют импульсы сигнала. Чтобы их удалить, подключен конденсатор с катушкой индуктивности, образующие фильтр, который стабилизирует форму напряжения.
Далее, сигнал идет на частотный преобразователь. Он состоит из шести мощных транзисторов с диодами, защищающими от пробоя напряжения. Ранее для таких целей применялись тиристоры, но они не обладали таким быстродействием, и создавали помехи.
Чтобы подключить режим замедления мотора, в схему устанавливают транзистор управления с резистором, который рассеивает энергию. Такой способ дает возможность удалять образуемое двигателем напряжение, чтобы защитить емкости фильтра от выхода из строя вследствие перезарядки.
Метод управления векторного типа частотой инвертора дает возможность создания схемы, которая автоматически регулирует сигнал. Для этого применяется управляющая система:
- Амплитудная.
- Широтно-импульсная.
Амплитудная регулировка работает на изменении напряжения входа, а ШИМ – порядка действия переключений транзисторов при постоянном напряжении на входе.
При регулировании ШИМ образуется период модуляции, когда обмотка якоря подключается по очереди к выводам выпрямителя. Так как тактовая частота генератора высокая и находится в интервале 2-15 килогерц, то в обмотке мотора, имеющего индуктивность, осуществляется сглаживание напряжения до нормальной синусоиды.
Принцип подключения ключей на транзисторахКаждый из транзисторов включается по встречно-параллельной схеме к диоду (Рис. 1). Через цепь транзистора протекает активный ток электродвигателя, реактивная часть поступает на диоды.
Чтобы исключить влияние помех на действие инвертора и электродвигателя, в схему подключают фильтр, который удаляет:
- Радиопомехи.
- Помехи от электрооборудования.
Об их образовании дает сигнал контроллер, чтобы снизить помехи, применяются экранированные провода от двигателя до выхода инвертора.
Чтобы оптимизировать точность функционирования асинхронных двигателей, в цепь управления инверторов подключают:
- Ввод связи.
- Контроллер.
- Карта памяти.
- Программа.
- Дисплей.
- Тормозной прерыватель с фильтром.
- Охлаждение схемы вентилятором.
- Прогрев двигателя.
Частотные преобразователи служат для работы в 1-фазных и 3-фазных сетях. Но если имеются промышленные источники питания на 220 вольт постоянного тока, то инверторы также можно подключать к ним.
Частотные преобразователи для 3-фазной сети рассчитаны на 380 вольт, их подают на мотор. 1-фазные частотники работают от сети 220 вольт, выдают на выходе 3 фазы. Частотник может подключаться к электродвигателю по схеме звезды или треугольника.
Обмотки мотора соединяются в «звезду» для частотника, работающего от трех фаз 380 вольт.
Обмотки двигателя соединяют «треугольником», когда инвертор запитан от 1-фазной сети.
При выборе метода подключения электродвигателя к частотнику необходимо определить мощности, которые создает двигатель на разных режимах, в том числе и медленный режим, тяжелый запуск. Преобразователь частоты нельзя эксплуатировать с перегрузкой длительное время. Его мощность должна быть с запасом, тогда работа будет без аварий, и срок службы продлится.
ПрименениеЧастотные преобразователи используются в устройствах с необходимостью регулировки скорости двигателя.
- Приводы насосов. Уменьшает потери тепла и воды на 10%. Снижает количество аварий, защищает электродвигатели.
- Вентиляционные системы. Экономия больше, чем при работе с насосами, так как для запуска мощных вентиляторов применяют мощные приводы агрегатов. Экономия появляется за счет снижения потерь на холостом ходу.
- Транспортеры. Инверторы адаптируют скорость двигателя к скорости технологической системы, которая постоянно изменяется. Мягкий пуск повышает ресурс привода системы, так как нет ударных нагрузок, которые вредят оборудованию.
- Компрессоры.
- Дымососы.
- Центрифуги.
- Лифтовое оборудование.
- Оборудование в деревообработке.
- Робототехника.
Преимущества
- Сглаживание работы мотора при запуске и торможении.
- Возможность управления группой двигателей.
- Плавное управление скоростью электродвигателей, без использования редукторов и других механических систем. Это позволяет упростить управление, сделать его дешевле и надежнее.
- Используются совместно с асинхронными двигателями для замены приводов постоянного тока.
- Образование многофункциональных систем управления приводами.
- Изменение настроек непосредственно в работе, без останова.
Похожие темы:
Регулятор оборотов асинхронного электродвигателя 220в своими руками
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Разделы сайта
DirectAdvert NEWS
Друзья сайта
Рекламный блок
Рекламный блок
Рекламный блок
Статистика
Довольно часто для каких-либо хозяйственных нужд требуется использование трехфазного электродвигателя (например, в качестве привода для эл. наждака, циркулярной пилы, бетономешалки и т. д). Известно, что трехфазные электродвигатели рассчитаны и предназначены для работы в трехфазной сети и далеко не всегда в распоряжении домашнего мастера бывает нужное напряжение
380 В, ведь в подавляющем большинстве частные дома и, тем более квартиры подключены к питающей сети
Существуют разные способы включения трехфазного электродвигателя в однофазную сеть
220 В, самым простым и достаточно надежным из которых является применение фазосдвигающего конденсатора в схеме подключения его обмоток. Само название “фазосдвигающий конденсатор” говорит само за себя: он сдвигает ток по фазе на 90°, создавая в нем двухфазный вращающийся магнитный поток, который, собственно и вызывает вращение вала электродвигателя.
На схеме ниже показано подключение фазосдвигающих конденсаторов к обмоткам, соединенным в “звезду” и “треугольник”, однако, следует учесть, что для снижения потерь мощности электродвигателя гораздо целесообразнее использовать соединение обмоток электродвигателя по схеме “треугольник”.
Схемы подключения трехфазных электродвигателей с различными соединениями обмоток к однофазной сети
Стоит заметить, что для запуска любого электродвигателя требуется б́ольшая емкость конденсатора, чем для его работы (когда двигатель уже “набрал” обороты). Поэтому, на схеме ниже общая емкость “разбита” на два конденсатора: Сп – конденсатор с дополнительной емкостью для пуска электродвигателя и Ср – основной конденсатор с рабочей емкостью. В случае использования электродвигателя небольшой мощности (до 1 кВт) вполне можно “обойтись” лишь рабочей емкостью Ср, исключив из схемы конденсатор Сп.
Схема подключения трехфазного электродвигателя к однофазной сети:
Резистор R включен в схему в качестве сопротивления для разрядки конденсаторов Сп и Ср, для этого подойдет резистор с сопротивлением 300 Ом. Для изменения направления вращения вала электродвигателя, в схеме предусмотрен тумблер переключатель SA.
Для расчета ёмкости рабочего конденсатора можно воспользоваться формулой:
С раб = 4800 • I / U , мкФ – для двигателей с обмотками, соединенными “треугольником”
С раб = 2800 • I / U , мкФ – для двигателей с обмотками, соединенными “звездой”
Это самый точный и наиболее предпочтительный способ расчета ёмкости рабочего конденсатора, но для его использования необходимо знать значение тока I в цепи двигателя, т. е. потребуются дополнительные измерения. Зная номинальную мощность электродвигателя, рассчитать ёмкость рабочего конденсатора можно так-же по формуле:
С раб = 66• Рном , мкФ, где Рном – номинальная мощность электродвигателя.
Говоря проще, для нормальной работы трёхфазного двигателя в сети
220 В рабочий конденсатор должен иметь ёмкость, близкую к 7 мкФ на каждые 0,1 кВт его паспортной мощности.
Определившись с емкостью рабочего конденсатора, можно определить нужное ее значение для пускового конденсатора: она должна быть примерно в 2,5-3 раза больше рабочего емкости рабочего конденсатора.
Конденсаторы рабочей емкости следует использовать следующих типов: МБГЧ, КГБ, БГТ с рабочим напряжением, превышающим сетевое напряжение примерно в 1,5 раза. Чтобы набрать нужную емкость, можно соединить (спаять) конденсаторы параллельно: тогда их общая емкость будет равна суммарной. Пусковую емкость тоже лучше всего набрать из конденсаторов этих типов, но при кратковременном пуске (не более 2-3 сек) можно использовать электролитические, типов КЭ-2, К50-3, ЭГЦ-М с рабочим напряжением не менее 450 в.
В заключение стоит сказать, что при включении трехфазного электродвигателя в однофазную сеть
220 В следует иметь ввиду неминуемую потерю его мощности. Если частота вращения уменьшается совсем незначительно в этом режиме, то потеря мощности может составлять 50% от номинальной. Поэтому, лучше в сеть
220 В включать электродвигатели с обмотками, соединенными “треугольником”- в однофазной сети они способны развить до 75% от своей номинальной мощности.
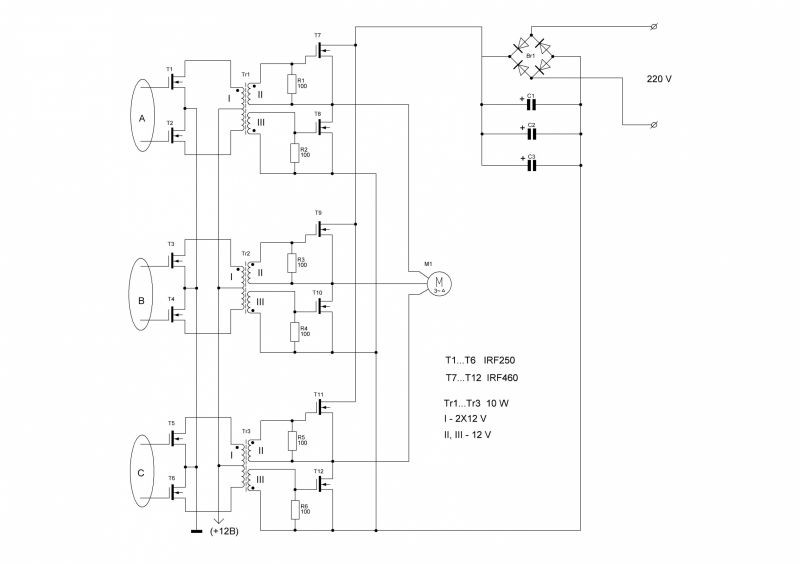
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах – от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным “мертвым временем” для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа – тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная – две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Чтобы не применять дорогой и сложный коллекторный двигатель в механизмах требующих изменения оборотов двигателя, можно обойтись асинхронным трёхфазным двигателем, введя в фазовый провод реостат или простейший регулятор мощности.
Переделка двигателя заключается в изменении якоря двигателя.
По образцу якоря, установленного в двигателе изготавливается «массивный якорь» из магнитомягкой малоуглеродистой стали или из серого чугуна (СЧ). (Чугунный работает лучше.) Из старого якоря можно выпрессовать вал и насадить на него массивный якорь.
Схема устройства запуска приведена на рисунке ниже.
Двунаправленный электронный ключ выполнен на диодах VD1, VD2 и три-нисторах VS1, VS2. Диоды VD3 и VD4 образуют двухполупериодный выпрямитель сетевого напряжения, а резистор R1 и стабилитрон VD5 — стабилизатор выпрямленного напряжения. Управление тринисторами электронного ключа осуществляется транзисторами VT1, VT2. Момент включения электронного ключа устанавливают резистором R7 “Режим”. При минимальном сопротивлении резистора ключ открывается в момент максимального напряжения на обмотке Б электродвигателя (см. рис. 2,6), при максимальном — ключ закрыт. Перед запуском двигателя движок резистора R7 переводят в крайнее нижнее (по схеме) положение, соответствующее максимальному фазовому сдвигу токов и, следовательно, наибольшему пусковому моменту на валу двигателя. После запуска тем же резистором устанавливают оптимальный режим работы двигателя в зависимости от его мощности и нагрузки. Как показала практика, устройство запуска эффективно работает с электродвигателями, частота вращения якоря которых не превышает 1500 об/мин и их обмотки соединены треугольником.
Устройство испытано на работе с двумя двигателями: мощностью 370 Вт (типа АААМ63В4СУ1) 1360 об/мин и мощностью 2000 Вт 1380 об/мин. В обоих случаях оно обеспечивало более уверенный запуск двигателя в сравнении с конденсаторной системой и мощность на валу двигателя после запуска была примерно одинаковой.
Детали устройства монтируют на печатной плате, которую размещают в корпусе из изоляционного материала. Тринисто-ры VS1, VS2 и диоды VD1, VD2 устанавливают на плате без теплоотводов. Резисторы — МЛТ, С2-33, конденсатор — К73-17. Транзисторы VT1 и VT2 могут быть любыми из тех же серий. Вместо диодов Д231, тринисторов КУ202Н можно использовать аналогичные другие с допустимым прямым током не менее 10 А и обратным напряжением не менее 300 В. При работе с устройством запуска следует иметь в виду, что все его элементы находятся под напряжением сети 220 В, поэтому необходимо соблюдать меры предосторожности.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
“>
Простые устройства на микроконтроллерах своими руками. Частотный преобразователь для асинхронного двигателя на AVR. Частотомер II от DANYK
Принцип закрывания дверцы клетки весьма прост. Дверка клетки подпирается специальным упором, сделанным из медной проволоки. К упору крепится капроновая нить нужной длины. Если потянуть за нить, то упор соскальзывает, и дверка клетки под собственным весом закрывается. Но это в ручном режиме, а я хотел реализовать автоматический процесс без участия кого-либо.
Для управления механизмом закрывания дверцы клетки был применен сервопривод. Но в процессе работы он создавал шум. Шум мог спугнуть птицу. Поэтому сервопривод я заменил на коллекторный двигатель, взятый из радиоуправляемой машинки. Он работал тихо и идеально подходил, тем более что управлять коллекторным двигателем не составляло сложностей.
Для определения, находится ли уже птица в клетке, я использовал недорогой датчик движения. Сам датчик движения уже является законченным девайсом, и паять ничего не нужно. Но у данного датчика угол срабатывания весьма большой, а мне нужно, чтобы он реагировал только во внутренней области клетки. Для ограничения угла срабатывания я поместил датчик в цоколь, когда-то служившей эконом-лампы. Из картона вырезал своего рода заглушку с отверстием посередине для датчика. Пошаманив с расстоянием данной заглушки относительно датчика, настроил оптимальный угол для срабатывания датчика.
В качестве зазывалы для птиц я решил применить звуковой модуль WTV020M01 с записанным на микроSD карте памяти пением чижа и щегла. Именно их я и собирался ловить. Поскольку я использовал один звуковой файл, то и управлять звуковым модулем я решил простим способом, без использования протокола обмена между звуковым модулем и микроконтроллером.
При подаче на девятую ножку звукового модуля низкого сигнала, модуль начинал воспроизводить. Как только звук воспроизводился на пятнадцатой ноге звукового модуля, устанавливается низкий уровень. Благодаря этому микроконтроллер отслеживал воспроизведение звука.
Поскольку я реализовал паузу между циклами воспроизведения звука, то для остановки воспроизведения звука программа подает низкий уровень на первую ножку звукового модуля (reset). Звуковой модуль является законченным устройством со своим усилителем для звука, и, по большому счету, в дополнительном усилителе звука он не нуждается. Но мне данного усиления звука показалось мало, и в качестве усилителя звука я применил микросхему TDA2822M. В режиме воспроизведения звука потребляет 120 миллиампер. Учитывая, что поимка птицы займет какое-то время, в качестве автономной батареи питания я применил не совсем новый аккумулятор от бесперебойника (всё равно валялся без дела).
Принцип электронного птицелова прост, и схема состоит в основном из готовых модулей.
Программа и схема —
Бывает идешь мимо припаркованных машин, и замечаешь краем глаза, что кто то уже давно, судя по тусклому свечению ламп, забыл свет выключить. Кто то и сам так попадал. Хорошо когда есть штатный сигнализатор не выключенного света, а когда нету поможет вот такая поделка: Незабывайка умеет пищать, когда не выключен свет и умеет пропикивать втыкание задней передачи.
Схема цифрового индикатора уровня топлива обладает высокой степенью повторяемости, даже если опыт работы с микроконтроллерами незначителен, поэтому разобраться в тонкостях процесса сборки и настройки не вызывает проблем. Программатор Громова – это простейший программатор, который необходим для программирования avr микроконтроллера. Программатор Горомова хорошо подходит как для внутрисхемного, так и для стандартного схемного программирования. Ниже приведена схема контроля индикатора топлива.
Плавное включение и выключение светодиодов в любом режиме (дверь открыта, и плафон включен). Так же авто выключение через пять минут. И минимальное потребление тока в режиме ожидания.
Вариант 1 — Коммутация по минусу. (с применением N-канальных транзисторов) 1) «коммутация по минусу», т.е такой вариант при котором один питающий провод лампы соединен с +12В аккумулятора (источника питания), а второй провод коммутирует ток через лампу тем самым включает ее. В данном варианте будет подаваться минус. Для таких схем нужно применять N-канальные полевые транзисторы в качестве выходных ключей.
Сам модем небольшого размера, недорог, работает без проблем, четко и быстро и вообще нареканий нет к нему. Единственный минус для меня был, это необходимость его включать и выключать кнопкой. Если его не выключать, то модем работал от встроенного аккумулятора, который в итоге садился и модем снова было нужно включать.
Принцип работы прост: привращении крутилки регулируется громкость, при нажатии — выключение-включение звука. Нужно для кар писи на винде или андройде
Изначально в Lifan Smily (да и не только) режим работы заднего дворника — единственный, и называется он «всегда махать». Особенно негативно воспринимается такой режим в наступивший сезон дождей, когда на заднем стекле собираются капли, но в недостаточном для одного прохода дворника количестве. Так, приходится либо слушать скрип резины по стеклу, либо изображать робота и периодически включать-выключать дворник.
Немного доработал схему реле времени задержки включения освещения салона для автомобиля Форд (схема разрабатывалась для вполне конкретного автомобиля, как замена штатного реле Ford 85GG-13C718-AA, но была успешно установлена в отечественную «классику»).
Уже не первый раз проскакивают такие поделки. Но почему-то люди жмуться на прошивки. Хотя в большинстве своём они основаны на проекте elmchan «Simple SD Audio Player with an 8-pin IC». Исходниник не открывают аргументируя, что пришлось исправлять проект, что в у меня качество лучше… и т.д. Короче взяли open source проект, собрали, и выдаёте за своё.
Итак. Микроконтроллер Attiny 13- так сказать сердце данного устройства. С его прошивкой долго мучился, никак не мог прошить.Ни 5ю проводками через LPT, ни прогромматором Громова. Компьютер просто не видит контроллер и все.
В связи с нововведениями в ПДД, народ стал думать о реализации дневных ходовых огней. Один из возможных путей это включение ламп дальнего света на часть мощности, об этом и есть данная статья.
Это устройство позволит ближнему свету автоматически включиться при начале движения и регулирует напряжение на лампах, ближнего света, в зависимости от скорости с которой вы едите. Так же, это послужит более безопасному движению и продлит срок службы ламп.
Теперь у меня на столе лежит два одинаковых программатора. А всё для того, чтобы попробовать новую прошивку. Эти близняшки буду шить друг друга. Все опыты проводятся под MS Windows XP SP3 .
Цель — увеличение скорости работы и расширение совместимости программатора.
Популярная среда разработки Arduino IDE привлекает большим количеством готовых библиотек и интересных проектов, которые можно найти на просторах Сети.
Некоторое время назад оказались в моем распоряжении несколько микроконтроллеров ATMEL ATMega163 и ATMega163L. Микросхемы были взяты из отслуживших свой срок девайсов. Данный контроллер очень похож на ATMega16, и фактически является его ранней версией.
Привет читателям Датагора! Мне удалось собрать вольтметр минимальных размеров с посегментной разверткой индикатора при довольно высокой функциональности, с автоматическим определением типа индикатора и выбором режимов.
Прочитав статьи Edward Ned’а, я собрал DIP-версию и проверил ее в работе. Действительно вольтметр работал, ток через вывод микросхемы к индикатору не превышал 16 миллиампер в импульсе, так что работа микросхемы без резисторов, ограничивающих токи сегментов, вполне допустима и не вызывает перегрузок элементов.
Не понравилось слишком частое обновление показаний на дисплее и предложенная шкала «999». Хотелось подправить программу, но исходных кодов автор не выкладывает.
В это же мне потребовались вольтметр и амперметр для небольшого блока питания. Можно было собрать на совмещенный вариант, а можно было собрать два миниатюрных вольтметра, причем габариты двух вольтметров получались меньше совмещенного варианта.
Свой выбор я остановил на микросхеме и написал исходный код для посегментной развертки индикатора.
В процессе написания кода возникла идея программируемого переключения шкал и положения запятой, что и удалось реализовать.
Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В частности, контакты со временем изнашиваются и приходят в негодность, появляется дребезг. Оптические энкодеры гораздо надежнее, но они дороже, многие из них боятся пыли, и они редко встречаются в таком виде, в котором их удобно было бы использовать в радиотехнике.
Короче, когда я узнал о том, что шаговый двигатель можно использовать как энкодер, эта идея мне очень понравилась.
Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь.
Предварительный усилитель-коммутатор с цифровым управлением. Применяем с программированием через оболочку Arduino, электронные потенциометры от Microchip, графический TFT.
Разрабатывать и собирать это устройство в мои планы не входило. Ну вот просто никак! У меня уже есть два предварительных усилителя. Оба меня вполне устраивают.
Но, как обычно происходит у меня, стечение обстоятельств или цепь неких событий, и вот нарисовалась задача на ближайшее время.
Здравствуйте, уважаемые читатели ! Хочу представить вам « » — проект подающего робота для настольного тенниса, который будет полезен новичкам и любителям при отработке приёма различного типа подач в любую зону стола, поможет рассчитать тайминг и силу приёма мяча.
А ещё можно просто привыкнуть к новой накладке или ракетке, и хорошенько простучать её.
Приветствую читателей ! Есть у меня пожилой компьютер, которому уже исполнилось лет десять. Параметры у него соответствующие: «пенёк» 3,0 ГГц, пара Гб ОЗУ и древняя материнская плата EliteGroup 915-й серии.
И задумал я куда-нибудь старичка пристроить (подарить, продать), т. к. выбрасывать жалко. Но мешала задуманному одна неприятность: у материнки не срабатывало включение от кнопки питания, и что бы я ни делал, начиная от проверки проводов и заканчивая прозвонкой транзисторов на плате, проблему найти так и не смог. Отдавать в ремонт спецам — ремонт окажется дороже всего компа.
Думал я, думал и нашёл способ запустить моего бедолагу. Выдернул батарею BIOS-а, от чего комп испугался и сразу стартанул при следующем появлении питания! А дальше — почти в каждом BIOS-е есть запуск ПК от любой кнопки клавиатуры или кнопки POWER на клавиатуре. Казалось бы, проблема решена. Ан нет, есть нюансы. С USB-клавиатур запуск не срабатывал. Плюс не хотелось пугать нового хозяина, компьютер должен стартовать от привычной кнопки питания на корпусе.
Поделки с микроконтроллерами – вопрос, как никогда актуальный и интересный. Ведь мы живем в 21 веке, эпохе новых технологий, роботов и машин. На сегодняшний день каждый второй, начиная с малого возраста, умеет пользоваться интернетом и различного рода гаджетами, без которых порою и вовсе сложно обойтись в повседневной жизни.
Поэтому в этой статье мы будем затрагивать, в частности, вопросы пользования микроконтроллерами, а также непосредственного применения их с целью облегчения миссий, каждодневно возникающих перед всеми нами. Давайте разберемся, в чем ценность этого прибора, и как просто использовать его на практике.
Микроконтроллер − это чип, целью которого является управление электрическими приборами. Классический контроллер совмещает в одном кристалле, как работу процессора, так и удаленных приборов, и включает в себя оперативное запоминающее устройство. В целом, это монокристальный персональный компьютер, который может осуществлять сравнительно обыкновенные задания.
Разница между микропроцессором и микроконтроллером заключается в наличии встроенных в микросхему процессора приборов «пуск-завершение», таймеров и иных удаленных конструкций. Применение в нынешнем контроллере довольно сильного вычисляющего аппарата с обширными способностями, выстроенного на моносхеме, взамен единого комплекта, существенно уменьшает масштабы, потребление и цену созданных на его основе приборов.
Из этого следует, что применить такое устройство можно в технике для вычисления, такой, как калькулятор, материнка, контроллеры компакт-дисков. Используют их также в электробытовых аппаратах – это и микроволновки, и стиральные машины, и множество других. Также микроконроллеры широко применяются в индустриальной механике, начиная от микрореле и заканчивая методиками регулирования станков.
Микроконроллеры AVR
Ознакомимся с более распространенным и основательно устоявшимся в современном мире техники контроллером, таким как AVR. В его состав входят высокоскоростной RISC-микропроцессор, 2 вида затратной по энергии памяти (Flash-кэш проектов и кэш сведений EEPROM), эксплуатационная кэш по типу RAM, порты ввода/вывода и разнообразные удаленные сопряженные структуры.
- рабочая температура составляет от -55 до +125 градусов Цельсия;
- температура хранения составляет от -60 до +150 градусов;
- наибольшая напряженность на выводе RESET, в соответствии GND: максимально 13 В;
- максимальное напряжение питания: 6.0 В;
- наибольший электроток линии ввода/вывода: 40 мА;
- максимальный ток по линии питания VCC и GND: 200 мА.
Возможности микроконтроллера AVR
Абсолютно все без исключения микроконтроллеры рода Mega обладают свойством самостоятельного кодирования, способностью менять составляющие своей памяти драйвера без посторонней помощи. Данная отличительная черта дает возможность формировать с их помощью весьма пластичные концепции, и их метод деятельности меняется лично микроконтроллером в связи с той либо иной картиной, обусловленной мероприятиями извне или изнутри.
Обещанное количество оборотов переписи кэша у микроконтроллеров AVR второго поколения равен 11 тысячам оборотов, когда стандартное количество оборотов равно 100 тысячам.
Конфигурация черт строения вводных и выводных портов у AVR заключается в следующем: целью физиологического выхода имеется три бита регулирования, а никак не два, как у известных разрядных контроллеров (Intel, Microchip, Motorola и т. д.). Это свойство позволяет исключить потребность обладать дубликатом компонентов порта в памяти с целью защиты, а также ускоряет энергоэффективность микроконтроллера в комплексе с наружными приборами, а именно, при сопутствующих электрических неполадках снаружи.
Всем микроконтроллерам AVR свойственна многоярусная техника пресечения. Она как бы обрывает стандартное течение русификатора для достижения цели, находящейся в приоритете и обусловленной определенными событиями. Существует подпрограмма преобразования запрашивания на приостановление для определенного случая, и расположена она в памяти проекта.
Когда возникает проблема, запускающая остановку, микроконтроллер производит сохранение составных счетчика регулировок, останавливает осуществление генеральным процессором данной программы и приступает к совершению подпрограммы обрабатывания остановки. По окончании совершения, под шефствующей программы приостановления, происходит возобновление заранее сохраненного счетчика команд, и процессор продолжает совершать незаконченный проект.
Поделки на базе микроконтроллера AVR
Поделки своими руками на микроконтроллерах AVR становятся популярнее за счет своей простоты и низких энергетических затрат. Что они собой представляют и как, пользуясь своими руками и умом, сделать такие, смотрим ниже.
«Направлятор»
Такое приспособление проектировалось, как небольшой ассистент в качестве помощника тем, кто предпочитает гулять по лесу, а также натуралистам. Несмотря на то, что у большинства телефонных аппаратов есть навигатор, для их работы необходимо интернет-подключение, а в местах, оторванных от города, это проблема, и проблема с подзарядкой в лесу также не решена. В таком случае иметь при себе такое устройство будет вполне целесообразно. Сущность аппарата состоит в том, что он определяет, в какую сторону следует идти, и дистанцию до нужного местоположения.
Построение схемы осуществляется на основе микроконтроллера AVR с тактированием от наружного кварцевого резонатора на 11,0598 МГц. За работу с GPS отвечает NEO-6M от U-blox. Это, хоть и устаревший, но широко известный и бюджетный модуль с довольно четкой способностью к установлению местонахождения. Сведения фокусируются на экране от Nokia 5670. Также в модели присутствуют измеритель магнитных волн HMC5883L и акселерометр ADXL335.
Беспроводная система оповещения с датчиком движения
Полезное устройство, включающее в себя прибор перемещения и способность отдавать, согласно радиоканалу, знак о его срабатывании. Конструкция является подвижной и заряжается с помощью аккумулятора или батареек. Для его изготовления необходимо иметь несколько радиомодулей HC-12, а также датчик движения hc-SR501.
Прибор перемещения HC-SR501 функционирует при напряжении питания от 4,5 до 20 вольт. И для оптимальной работы от LI-Ion аккумулятора следует обогнуть предохранительный светодиод на входе питания и сомкнуть доступ и вывод линейного стабилизатора 7133 (2-я и 3-я ножки). По окончанию проведения этих процедур прибор приступает к постоянной работе при напряжении от 3 до 6 вольт.
Внимание: при работе в комплексе с радиомодулем HC-12 датчик временами ложно срабатывал. Во избежание этого необходимо снизить мощность передатчика в 2 раза (команда AT+P4). Датчик работает на масле, и одного заряженного аккумулятора, емкостью 700мА/ч, хватит свыше, чем на год.
Минитерминал
Приспособление проявило себя замечательным ассистентом. Плата с микроконтроллером AVR нужна, как фундамент для изготовления аппарата. Из-за того, что экран объединён с контроллером непосредственно, то питание должно быть не более 3,3 вольт, так как при более высоких числах могут возникнуть неполадки в устройстве.
Вам следует взять модуль преобразователя на LM2577, а основой может стать Li-Ion батарея емкостью 2500мА/ч. Выйдет дельная комплектация, отдающая постоянно 3,3 вольта во всём трудовом интервале напряжений. С целью зарядки применяйте модуль на микросхеме TP4056, который считается бюджетным и достаточно качественным. Для того чтобы иметь возможность подсоединить минитерминал к 5-ти вольтовым механизмам без опаски сжечь экран, необходимо использовать порты UART.
Основные аспекты программирования микроконтроллера AVR
Кодирование микроконтоллеров зачастую производят в стиле ассемблера или СИ, однако, можно пользоваться и другими языками Форта или Бейсика. Таким образом, чтобы по факту начать исследование по программированию контроллера, следует быть оснащенным следующим материальным набором, включающим в себя: микроконтроллер, в количестве три штуки — к высоковостребованным и эффективным относят — ATmega8A-PU, ATtiny2313A-PU и ATtiny13A- PU.
Чтобы провести программу в микроконтроллер, нужен программатор: лучшим считают программатор USBASP, который дает напряжение в 5 Вольт, используемое в будущем. С целью зрительной оценки и заключений итогов деятельности проекта нужны ресурсы отражения данных − это светодиоды, светодиодный индуктор и экран.
Чтобы исследовать процедуры коммуникации микроконтроллера с иными приборами, нужно числовое приспособление температуры DS18B20 и, показывающие правильное время, часы DS1307. Также важно иметь транзисторы, резисторы, кварцевые резонаторы, конденсаторы, кнопки.
С целью установки систем потребуется образцовая плата для монтажа. Чтобы соорудить конструкцию на микроконтроллере, следует воспользоваться макетной платой для сборки без пайки и комплектом перемычек к ней: образцовая плата МВ102 и соединительные перемычки к макетной плате нескольких видов — эластичные и жесткие, а также П-образной формы. Кодируют микроконтроллеры, применяя программатор USBASP.
Простейшее устройство на базе микроконтроллера AVR. Пример
Итак, ознакомившись с тем, что собой представляют микроконтроллеры AVR, и с системой их программирования, рассмотрим простейшее устройство, базисом для которого служит данный контроллер. Приведем такой пример, как драйвер низковольтных электродвигателей. Это приспособление дает возможность в одно и то же время распоряжаться двумя слабыми электрическими двигателями непрерывного тока.
Предельно возможный электроток, коим возможно загрузить программу, равен 2 А на канал, а наибольшая мощность моторов составляет 20 Вт. На плате заметна пара двухклеммных колодок с целью подсоединения электромоторов и трехклеммная колодка для подачи усиленного напряжения.
Устройство выглядит, как печатная плата размером 43 х 43 мм, а на ней сооружена минисхемка радиатора, высота которого 24 миллиметра, а масса – 25 грамм. С целью манипулирования нагрузкой, плата драйвера содержит около шести входов.
Заключение
В заключение можно сказать, что микроконтроллер AVR является полезным и ценным средством, особенно, если дело касается любителей мастерить. И, правильно использовав их, придерживаясь правил и рекомендаций по программированию, можно с легкостью обзавестись полезной вещью не только в быту, но и в профессиональной деятельности и просто в повседневной жизни.
Представляю вторую версию двухканального циклического таймера. Были добавлены новые функции и изменилась принципиальная схема. Циклический таймер позволяет включать и выключать нагрузку, а также выдерживать паузу на заданные интервалы времени в циклическом режиме. Каждый из выходов таймера имеет 2 режима работы — «Логический» и «ШИМ». Если выбран логический режим устройство позволяет управлять с помощью контактов реле освещением, отоплением, вентиляцией и другими электроприборами. Нагрузкой могут выступать любые электрические приборы мощность нагрузки которых не превышает максимального тока реле. Тип выхода «ШИМ» позволяет например подключить через силовой транзистор двигатель постоянного тока, при этом есть возможность установить скважность ШИМ, чтобы двигатель вращался с определенной скоростью.
Часы собранные на микроконтроллере ATtiny2313 и светодиодной матрице показывают время в 6-ти различных режимах.
Светодиодная матрица 8*8 управляется методом мультиплексирования. Токоограничивающие резисторы исключены из схемы, чтобы не испортить дизайн, и, поскольку отдельные светодиоды управляются не постоянно, они не будут повреждены.
Для управления используется только одна кнопка, длительное нажатие кнопки(нажатие и удержание) для поворота меню и обычное нажатие кнопки для выбора меню.
Это хобби-проект, потому точность хода часов зависит лишь от калибровки внутреннего генератора контроллера. Я не использовал кварц в этом проекте, так как он занимал бы два нужных мне вывода ATtiny2313. Кварц может быть использован для повышения точности в альтернативном проекте (печатной плате).
На этот раз я представлю простой малогабаритный частотомер с диапазоном измерения от 1 до 500 МГц и разрешением 100 Гц.
В настоящее время, независимо от производителя, почти все микроконтроллеры имеют так называемые счетные входы, которые специально предназначены для подсчета внешних импульсов. Используя этот вход, относительно легко спроектировать частотомер.
Однако этот счетчый вход также имеет два свойства, которые не позволяют напрямую использовать частотомер для удовлетворения более серьезных потребностей. Одна из них заключается в том, что на практике в большинстве случаев мы измеряем сигнал с амплитудой в несколько сотен мВ, который не может перемещать счетчик микроконтроллера. В зависимости от типа, для правильной работы входа требуется сигнал не менее 1-2 В. Другое заключается в том, что максимальная измеримая частота на входе микроконтроллера составляет всего несколько МГц, это зависит от архитектуры счетчика, а также от тактовой частоты процессора.
Это устройство позволяет контролировать температуру воды в чайнике, имеет функцию поддержания температуры воды на определенном уровне, а также включение принудительного кипячения воды.
В основе прибора микроконтроллер ATmega8, который тактируется от кварцевого резонатора частотой 8МГц. Датчик температуры – аналоговый LM35. Семисегментный индикатор с общим анодом.
Эта декоративная звезда состоит из 50 специальных светодиодов RGB, которые контролируются ATtiny44A . Все светодиоды непрерывно изменяют цвет и яркость в случайном порядке. Также есть несколько разновидностей эффектов, которые также активируются случайно. Три потенциометра могут изменять интенсивность основных цветов. Положение потенциометра индицируется светодиодами при нажатии кнопки, а изменение цвета и скорость эффекта можно переключать в три этапа. Этот проект был полностью построен на компонентах SMD из-за специальной формы печатной платы. Несмотря на простую схему, структура платы довольно сложная и вряд ли подойдет для новичков.
В этой статье описывается универсальный трехфазный преобразователь частоты на микроконтроллере(МК) ATmega 88/168/328P . ATmega берет на себя полный контроль над элементами управления, ЖК-дисплеем и генерацией трех фаз. Предполагалось, что проект будет работать на готовых платах, таких как Arduino 2009 или Uno, но это не было реализовано. В отличие от других решений, синусоида не вычисляется здесь, а выводится из таблицы. Это экономит ресурсы, объем памяти и позволяет МК обрабатывать и отслеживать все элементы управления. Расчеты с плавающей точкой в программе не производятся.
Частота и амплитуда выходных сигналов настраиваются с помощью 3 кнопок и могут быть сохранены в EEPROM памяти МК. Аналогичным образом обеспечивается внешнее управление через 2 аналоговых входа. Направление вращения двигателя определяется перемычкой или переключателем.
Регулируемая характеристика V/f позволяет адаптироваться ко многим моторам и другим потребителям. Также был задействован интегрированный ПИД-регулятор для аналоговых входов, параметры ПИД-регулятора могут быть сохранены в EEPROM. Время паузы между переключениями ключей (Dead-Time) можно изменить и сохранить.
Этот частотомер с AVR микроконтроллером позволяет измерять частоту от 0,45 Гц до 10 МГц и период от 0,1 до 2,2 мкс в 7-ми автоматически выбранных диапазонах. Данные отображаются на семиразрядном светодиодном дисплее. В основе проекта микроконтроллер Atmel AVR ATmega88/88A/88P/88PA, программу для загрузки вы можете найти ниже. Настройка битов конфигурации приведена на рисунке 2 .
Принцип измерения отличается от предыдущих двух частотомеров. Простой способ подсчета импульсов через 1 секунду, используемый в двух предыдущих частотомерах(частотомер I, частотомер II), не позволяет измерять доли Герц. Вот почему я выбрал другой принцип измерения для своего нового частотомера III. Этот метод намного сложнее, но позволяет измерять частоту с разрешением до 0,000 001 Гц.
Это очень простой частотомер на микроконтроллере AVR. Он позволяет измерять частоты до 10 МГц в 2-х автоматически выбранных диапазонах. Он основан на предыдущем проекте частотомера I , но имеет 6 разрядов индикатора вместо 4-х. Нижний диапазон измерения имеет разрешение 1 Гц и работает до 1 МГц. Более высокий диапазон имеет разрешение 10 Гц и работает до 10 МГц. Для отображения измеренной частоты используется 6-разрядный светодиодный дисплей. Прибор построен на основе микроконтроллера Atmel AVR ATtiny2313A или ATTiny2313 . Настройку битов конфигурации вы можете найти ниже.
Микроконтроллер тактируется от кварцевого резонатора частотой 20 МГц (максимально допустимая тактовая частота). Точность измерения определяется точностью этого кристалла, а также конденсаторов C1 и C2. Минимальная длина полупериода измеряемого сигнала должна быть больше периода частоты кварцевого генератора (ограничение архитектуры AVR). Таким образом, при 50% рабочем цикле можно измерять частоты до 10 МГц.
Зачем двигателю переменного тока преобразователь частоты?
Что такое преобразователь частоты?
Проще говоря, преобразователь частоты — это устройство преобразования энергии. Преобразователь частоты преобразует базовую синусоидальную мощность с фиксированной частотой и фиксированным напряжением (сетевое питание) в выходной сигнал переменной частоты и переменного напряжения, используемый для управления скоростью асинхронных двигателей.
Зачем нужен преобразователь частоты?
Основная функция преобразователя частоты в водной среде — экономия энергии.За счет управления скоростью насоса вместо регулирования потока с помощью дроссельных клапанов можно значительно сэкономить энергию. Например, снижение скорости на 20% может дать экономию энергии на 50%. Ниже описывается снижение скорости и соответствующая экономия энергии. Помимо экономии энергии, значительно увеличивается срок службы крыльчатки, подшипников и уплотнений.
Преобразователи частоты
Доступные во многих различных типах преобразователи частоты предлагают оптимальный метод согласования производительности насоса и вентилятора с требованиями системы.Чаще всего используется преобразователь частоты. Он преобразует стандартную мощность предприятия (220 В или 380 В, 50 Гц) в регулируемое напряжение и частоту для питания двигателя переменного тока. Частота, применяемая к двигателю переменного тока, определяет скорость двигателя. Двигатели переменного тока обычно представляют собой такие же стандартные двигатели, которые могут быть подключены к сети переменного тока. За счет включения байпасных пускателей работа может поддерживаться даже в случае выхода инвертора из строя. Преобразователи частоты
также обладают дополнительным преимуществом — увеличенным сроком службы подшипников и уплотнений насоса. Поддерживая в насосе только давление, необходимое для удовлетворения требований системы, насос не подвергается воздействию более высоких давлений, чем необходимо.Следовательно, компоненты служат дольше.
Те же преимущества, но в меньшей степени, применимы и к вентиляторам, работающим от преобразователей частоты.
Для достижения оптимальной эффективности и надежности многие специалисты по спецификациям получают от производителей подробную информацию об эффективности преобразователя частоты, требуемом техническом обслуживании, диагностических возможностях преобразователя частоты и общих рабочих характеристиках. Затем они проводят подробный анализ, чтобы определить, какая система даст наилучшую окупаемость инвестиций.
Дополнительные преимущества преобразователей частоты
Помимо экономии энергии и лучшего управления технологическим процессом преобразователи частоты могут обеспечить и другие преимущества:
- Преобразователь частоты может использоваться для управления технологической температурой, давлением или расходом без использования отдельного контроллера. Соответствующие датчики и электроника используются для сопряжения управляемого оборудования с преобразователем частоты.
- Затраты на техническое обслуживание могут быть снижены, поскольку более низкие рабочие скорости приводят к увеличению срока службы подшипников и двигателей.
- Устранение дроссельных клапанов и заслонок также устраняет необходимость технического обслуживания этих устройств и всех связанных с ними элементов управления.
- Устройство плавного пуска для двигателя больше не требуется.
- Контролируемая скорость нарастания в жидкостной системе может устранить проблемы гидравлического удара.
- Способность преобразователя частоты ограничивать крутящий момент до уровня, выбранного пользователем, может защитить приводимое оборудование, которое не может выдерживать чрезмерный крутящий момент.
Анализировать систему в целом
Поскольку процесс преобразования входящей мощности с одной частоты на другую приведет к некоторым потерям, экономия энергии всегда должна происходить за счет оптимизации производительности всей системы. Первым шагом в определении потенциала энергосбережения системы является тщательный анализ работы всей системы. Чтобы обеспечить экономию энергии, необходимы подробные знания о работе оборудования и технологических требованиях. Кроме того, следует учитывать тип преобразователя частоты, предлагаемые функции и общую пригодность для применения.
Внутренняя конфигурация преобразователя частоты
Преобразователь частоты состоит из трех основных частей:
- Схема выпрямителя — состоит из диодов, тиристоров или биполярных транзисторов с изолированным затвором. Эти устройства преобразуют мощность сети переменного тока в постоянный ток.
- Шина постоянного тока — состоит из конденсаторов, которые фильтруют и накапливают заряд постоянного тока.
- Инвертор — состоит из высоковольтных мощных транзисторов, которые преобразуют мощность постоянного тока в выход переменного тока с переменной частотой и напряжением, подаваемый на нагрузку.
Преобразователи частоты также содержат мощный микропроцессор, который управляет схемой инвертора для создания почти чистого синусоидального напряжения переменной частоты, подаваемого на нагрузку. Микропроцессор также управляет конфигурациями ввода / вывода, настройками преобразователя частоты, состояниями неисправности и протоколами связи.
Байпас частотно-регулируемого привода
Это интересная тема со множеством перипетий. На первый взгляд, обход ЧРП кажется достаточно простым, не так ли? Сначала задайте себе несколько вопросов.- Был ли частотно-регулируемый привод спроектирован и спроектирован как исходная система для обеспечения первичного управления технологическим процессом?
Какую функцию выполняет ЧРП?
- Используется ли он как часть системы кондиционирования воздуха с переменным объемом воздуха (VAV)?
- Используется ли он как часть системы контроля давления насоса?
- Если он является частью системы управления давлением в воздуховоде VAV, что произойдет, если вы обойдете частотно-регулируемый привод и подадите внезапный ударный выброс полного давления воздуха в систему воздуховодов, которая может иметь ограниченные условия заслонки, приведет ли это к разрыву или повреждению воздуховода или заслонок?
Учитывая, что в данном случае частотно-регулируемый привод был спроектирован в системе с самого начала, отсюда следует, что предохранители или автоматические выключатели, выбранные для характеристик низкого пускового тока частотно-регулируемого привода, могут не подходить для обычного режима прямого запуска.
Будет ли в байпасе адекватная тепловая защита двигателя, ранее обеспечиваемая ЧРП?
Имейте в виду, что управление первичным процессом и / или энергосбережение теряются в ситуациях байпаса. Хорошо, давайте предположим, что частотно-регулируемый привод не был спроектирован и спроектирован как исходная система, а был модернизирован на более позднем этапе, и что существующие силовые кабели и первоначальные пусковые устройства остались на своих местах. Таким образом, в случае обхода исходные тепловые перегрузки будут доступны при условии соответствующей калибровки для защиты двигателя.
Все хорошо, но как насчет дополнительных соображений, упомянутых выше, включая потерю управления первичным процессом и / или экономию энергии на байпасе?
Нужно ли отключать частотно-регулируемый привод для технического обслуживания и ремонта?
Иногда с хорошими намерениями преобразователи частоты встраиваются с возможностью байпаса как часть их конструкции с намерением, чтобы текущее техническое обслуживание и обслуживание можно было проводить для преобразователя частоты без потери критически важных функций. Отличная идея, но как будет изолировать частотно-регулируемый привод, чтобы это произошло?
Обычные контакторы на входе и выходе частотно-регулируемого привода как часть системы байпаса обычно не соответствуют требованиям AS3000 (Правила электромонтажа) для изолирующих устройств.
Если целью является обеспечение доступа к частотно-регулируемому приводу для обслуживания во время работы в режиме байпаса, то для обеспечения личной безопасности необходимо соответствующее коммутационное оборудование и надлежащие меры физического разделения. По этой причине конструкции, предусматривающие встраивание функции байпаса в ЧРП, обычно не соответствуют этому назначению. В случае, если частотно-регулируемый привод требует значительного ремонта, что потребует снятия частотно-регулируемого привода для проведения ремонтных работ, важно, чтобы байпасное устройство оставалось на месте (требуя отделения от частотно-регулируемого привода) и работало, чтобы служить намеченной важной цели .
Обход критически важных функций
Если элемент оборудования действительно критически важен, то в качестве первого средства имейте адекватное резервирование и резервное копирование как часть проекта и встроенное в систему, например, для запуска, ожидания и резервного копирования. накачать все с соответствующими частотно-регулируемыми приводами.
Там, где адекватное резервирование неосуществимо, необходимо понять уязвимости и недостатки конструкции вашей системы и то, как они повлияют на ваш бизнес. Обязательно имейте проверенную стратегию обхода, но понимайте, какое влияние она окажет, и обеспечьте достаточную доступность запасных частей на месте и проверенные процессы на месте, чтобы минимизировать время простоя и вернуться к нормальной работе.
Как обойти ЧРП?
Как и большинство других вещей в жизни, существует более одного способа выполнить процедуру обхода частотно-регулируемого привода.
Приняв во внимание вышеизложенное и сделав вывод о том, что источник электропитания, автоматический выключатель или предохранители и любые другие электрические компоненты соответствуют результирующему пусковому току байпаса, что никакие повреждения трубопроводов, уплотнений, воздуховодов, заслонок и т. Д. Не будут повреждены, а также это удаление ЧРП из схемы управления не будет препятствовать продолжению удовлетворительной работы органов управления и, что наиболее важно, что операция байпаса приведет к желаемому результату, тогда вы готовы приступить к байпасу.
Самым простым и наименее сложным способом было бы просто попросить электрика отсоединить входные и выходные силовые кабели и затем безопасно подключить их за пределами частотно-регулируемого привода. Если частотно-регулируемый привод должен быть удален, все соединения управления также должны быть отключены. Обратной стороной этого является то, что вам необходим квалифицированный электрик с соответствующей квалификацией, который будет доступен своевременно и предварительно определил пригодность такой схемы для удовлетворения ваших потребностей.
Для критически важных приложений, где время имеет решающее значение, а резервный и вспомогательный персонал недоступен немедленно, была бы желательна полностью автоматизированная система переключения байпаса.В этом случае все вышеперечисленные соображения были бы приняты во внимание, и было бы доказано, что результат обеспечит удовлетворительное сохранение критического статуса миссии.
Такая система требует ряда компонентов, включая контакторы линейного входа и выхода частотно-регулируемого привода, пусковой контактор прямого байпаса, тепловую перегрузку, временное и логическое управление и соответствующую проводку.
Имейте в виду, что выходные клеммы частотно-регулируемого привода не должны подвергаться воздействию электросети во время этой процедуры, а также имейте в виду, что до тех пор, пока магнитное поле не исчезнет, трехфазный асинхронный двигатель будет действовать как генератор и подавать ЭДС прямо на Выходные клеммы частотно-регулируемого привода при возврате в нормальный режим работы, если не соблюдается следующая логика.
Система переключения на байпас должна быть спроектирована таким образом, чтобы частотно-регулируемый привод отключался от цепи, а двигатель работал напрямую от контактора байпаса подходящего номинала на стороне сети частотно-регулируемого привода.
Выходной контактор и байпасный прямой пускатель должны быть электрически и механически заблокированы для предотвращения одновременного включения.
При переключении на байпас
Временная логика должна обеспечивать временные задержки в схеме переключения, чтобы гарантировать, что при переключении на байпас сначала размыкается линейный контактор, а затем размыкается выходной контактор после задержки в 1-2 секунды.После этого байпасный пускатель прямого включения должен закрываться с задержкой в 1–2 секунды.
При переходе в нормальный режим
Синхронизирующая логика должна обеспечивать временные задержки в схеме переключения, чтобы гарантировать, что при переключении в нормальный режим сначала размыкается байпасный прямой пускатель, а затем замыкается выходной контактор после задержки в 3 секунды, а затем линейный контактор замыкается после дополнительной задержки от 1 до 2. секунд. Вышеупомянутые процедуры обхода могут быть инициированы соответствующим образом спроектированным и сконфигурированным ручным процессом или автоматически с помощью управляющего сигнала от вашей системы управления, при поддержке соответствующей документации и маркировки.
Как проверять двигатели с помощью осциллографа
Трехфазный асинхронный двигатель повсеместно используется в промышленности из-за своей надежности и необходимости нечастого обслуживания. Без щеток и внешней коммутации с помощью сигнала, поставляемого утилитой, мало что может пойти не так. Однако в нужный момент и когда на большом объекте работает очень много единиц, кое-что случается.
Здесь мы не будем обсуждать частотно-регулируемый привод (VFD), синхронный двигатель или однофазные установки; они достойны своих статей.Для промышленного применения более 90% всех двигателей являются асинхронными. Большинство из них, которые не являются дробными единицами мощности, являются трехфазными. (Там, где доступно трехфазное питание, это правильный вариант. Эти двигатели менее дорогие, более эффективные и — с тремя проводами, не считая заземления оборудования — проводники меньше и проще в установке.)
Сначала основы. Подшипники двигателя и обмотки возбуждения жестко закреплены внутри корпуса двигателя. Вал и коллектор, если таковые имеются, вместе известные как якорь, поддерживаются подшипниками, поэтому они могут свободно вращаться без смещения оси.
Типичный асинхронный двигатель и его внутреннее устройство, как описано в Gibbons Engineering Group.Ротор и статор создают магнитные поля. Один, но не оба этих компонента могут состоять из постоянных магнитов или тел из мягкого железа, которые обладают магнитным сопротивлением. Механизм вращения двигателя различается в зависимости от его типа. В двигателе постоянного тока электрический ток и, следовательно, магнитное поле должны периодически менять полярность, поэтому вращающееся магнитное поле ротора всегда преследует стационарное магнитное поле, создаваемое катушками возбуждения.Постоянно изменяющееся магнитное поле, связанное с якорем, становится возможным благодаря колеблющемуся электрическому току, который проходит в якорь через щетки, движущиеся вдоль коммутатора. Коммутатор состоит из соединенных в обратном направлении смежных проводящих сегментов, изолированных друг от друга.
Таким образом, щетки выполняют двойную функцию: вводят электрическую энергию в якорь и быстро меняют полярность, так что магнитное поле меняет направление по мере необходимости. Без переключающего действия вращательное движение составляло бы в лучшем случае пол-оборота, и тогда ротор оставался бы в состоянии покоя.
Синхронный двигатель переменного тока также состоит из одного магнитного поля, непрерывно ищущего другое, но коммутация выполняется совершенно другим способом. Реверсивный ток на самом деле связан с вращательной природой вращающихся турбин генерирующей установки. Из-за такой конструкции синхронный двигатель переменного тока, как и бесщеточный двигатель переменного тока, называется внешне коммутируемым.
В синхронном двигателе переменного тока все еще существует утомительная проблема подачи тока в якорь.В отличие от катушек возбуждения, якорь вращается и не может быть подключен напрямую. Здесь снова необходимы щетки, а это относительно дорогое решение, требующее больших затрат на обслуживание. В этом контексте мы видим огромное преимущество асинхронного двигателя, которое объясняет его огромную популярность во всем мире во вращающихся приложениях.
В асинхронном двигателе обмотки возбуждения и обмотки ротора электрически ведут себя как первичная и вторичная обмотки простого трансформатора переменного тока. Электроэнергия переменного тока извне двигателя подключается к обмоткам возбуждения асинхронного двигателя, создавая колеблющееся магнитное поле.Это индуцирует электрический ток в роторе вместе с магнитным полем. Как следствие, якорь без прямого электрического входа начинает вращаться. Вращение можно использовать для выполнения полезной работы с помощью выходного вала.
Вращательное движение ротора не синхронизируется напрямую с вращающимся магнитным полем, связанным с катушками возбуждения. (Асинхронный двигатель также называют асинхронным двигателем.) На самом деле, магнитное поле катушки возбуждения и ротор вращаются с разной скоростью, соотношение между ними обычно выражается в процентах, обычно менее 10%.Этот процент известен как проскальзывание, которое актуально только для асинхронных двигателей. При заблокированном роторе скольжение составляет 100%. При полной нагрузке скольжение может составлять от 1% в больших асинхронных двигателях до 6% в двигателях с дробной мощностью. Не следует понимать скольжение как бесполезное движение. Это присуще всем асинхронным двигателям, и без проскальзывания они вообще не вращаются.
Обычно промышленный асинхронный двигатель представляет собой трехфазный агрегат, выходной вал которого приводит в движение такую нагрузку, как вентилятор, конвейерную ленту, шнек, пильный диск или дробилку.Он питается от электрической энергии с выхода частотно-регулируемого привода или подходящего контроллера.
Асинхронный двигатель, не питаемый от частотно-регулируемого привода, обычно имеет клеммы от электросети. Эта мощность может включаться и выключаться контроллером, и любые две ножки могут быть переключены, чтобы изменить направление вращения. Но напряжение и частота не изменяются и появляются на клеммах двигателя в соответствии с питанием от электросети. Рабочий цикл и ширина импульса не применимы, если ЧРП отсутствует на картинке.
Со временем у асинхронных двигателей могут появиться проблемы. Они могут состоять из одного или нескольких следующих элементов:
• Ненормальное повышение температуры, измеренное на поверхности корпуса двигателя. Если самая высокая температура измеряется на подшипнике, возможно, он не имеет смазки или его необходимо заменить. В крайнем случае, ослабленный подшипник может позволить ротору тереться о статор. Убедитесь, что пыль или другой материал не скапливается снаружи или внутри шкафа и циркуляция воздуха не затруднена.
• Пониженная частота вращения, обычно сопровождающаяся повышением температуры, измеряется на выходном валу или проявляется в нагрузке.
• Повышенный ток, измеренный на выводах, подключенных к клеммам двигателя. Этот высокий ток также часто сопровождается повышением температуры. Ток часто вызывает срабатывание устройств защиты от сверхтока, в крайнем случае, когда двигатель не запускается.
Часто плохая работа двигателя вызвана заеданием или несоответствием нагрузки, поэтому это не является неисправностью двигателя, хотя двигатель может быть поврежден, если это состояние сохраняется.При возникновении проблемы не следует запускать двигатель в надежде, что он поправится сам по себе. Будет только хуже, и при этом будут повреждены обмотки двигателя или внутренняя изоляция от тепла.
После устранения неисправности подшипника, привода и нагрузки на очереди электрические измерения. Мультиметр в сочетании с токоизмерительными клещами электрика предоставит полезную информацию, но осциллограф лучше. Что нам нужно сделать, так это просмотреть форму волны электросети, чтобы оценить качество электроэнергии.Низкое линейное напряжение, фазовый дисбаланс или пропадание фазы, прерывистый шум, вызванный плохим соединением, или вредные гармоники могут привести к ухудшению работы двигателя, и все это можно быстро обнаружить на экране осциллографа.
Для полевых измерений двигателя лучше всего подойдет портативный осциллограф с питанием от батареи. Прочный резиновый корпус и защищенная от окружающей среды электроника подходят для суровых условий, характерных для заводского цеха или на открытом воздухе.
Что еще более важно, в отличие от заземленного настольного прибора, портативный осциллограф имеет каналы, которые изолированы от земли и друг от друга, поэтому нет опасности сильного тока короткого замыкания, если заземляющий возвратный провод подключен к провод или клемма, относящиеся к потенциалу земли, но плавающие над ним. Большинство портативных осциллографов безопасны с этой точки зрения, но для уверенности лучше проверить документацию производителя.
Когда большой двигатель впервые устанавливается и обнаруживается, что он работает правильно, рекомендуется снимать показания осциллографа, записывать результаты и повторять показания через равные промежутки времени, чтобы можно было создать базу данных.Тогда показания, снятые после начала ненормальной работы, будут более значимыми.
Чтобы получить полную картину, показания осциллографа следует снимать в доступных местах, начиная с сети в электрической сети, затем работая после входа и выхода разъединителя и контроллера мотора и, наконец, у входных клемм мотора. Эти показания следует снимать при работающем двигателе, при включенной и не включенной нагрузке, а также при неработающем двигателе. Следует проводить измерения как напряжения, так и тока.Если проблема носит временный характер, измерения, возможно, придется проводить постоянно, а результаты регистрировать. Иногда проблемы с качеством электроэнергии возникают из-за другого оборудования на том же предприятии или из-за совместного использования линии электроснабжения. Возможно, проблемы возникают только в рабочее время, когда работает конкретное оборудование. При проведении этих измерений важными показателями являются:
• Входное напряжение: 10% часто указывается как максимально допустимое отклонение от номинального при полной нагрузке двигателя, но это значение может сократить срок службы двигателя, особенно потому, что во время запуска двигатель будет потреблять большой ток, что приведет к дальнейшему падению напряжения при вход двигателя.Низкое напряжение может быть вызвано внутренним износом двигателя, несоответствием или заеданием нагрузки, несоответствующим размером цепи ответвления, большой нагрузкой в соседнем оборудовании или плохим электроснабжением. Показания высокого напряжения необычны, скорее всего, из-за неисправности в электросети.
• Несимметрия напряжения и / или тока: 5% отклонение между опорами может вызвать нагрев двигателя и сократить срок его службы. Иногда дисбаланс можно уменьшить, свернув соединения, не меняя местами любые два из них. Но чаще это знак того, что мотор необходимо перемотать или заменить.Другая возможность, однако, состоит в том, что проблема внешняя. Чтобы выяснить это, убедитесь, что все внешние нагрузки отключены, а все кабели и выводы не повреждены. Затем повторите измерения напряжения и тока.
• Измерения осциллограмм: Асинхронный асинхронный двигатель, как и другие двигатели переменного тока, работает с током, который является чистой синусоидой. Например, если двигатель питается от прямоугольной волны, производимой инвертором старого типа, двигатель перегреется и преждевременно выйдет из строя.Точно так же, если форма волны зашумлена, обрезана или имеет пики там, где их не должно быть, работа двигателя будет проблематичной. Во временной области форму сигнала на клеммах двигателя можно просматривать при работающем двигателе и без него, а также с подключенной нагрузкой и без нее.
Прямоугольная волна показана во временной и частотной областях. Обратите внимание на многочисленные гармоники.Гармоники могут быть причиной перегрева двигателя и частых отключений. Гармоники можно измерить, просмотрев напряжение питания на входных клеммах двигателя в частотной области.Современные осциллографы имеют такую возможность, доступ к которой обычно осуществляется нажатием кнопки с надписью Math. Затем перейдите к быстрому преобразованию Фурье (БПФ), и вы увидите представление сигнала в частотной области.
Синусоидальная волна отображается во временной и частотной областях. Единая основная частота без гармоник.Как и в обычной временной области, ось Y представляет амплитуду. Вместо напряжения отображается мощность, откалиброванная для удобочитаемости в логарифмической шкале в дБ.Ось X представляет частоту. Хорошая синусоида будет иметь один сильный пик на основной частоте, единственной другой неровностью на графике является минимальный уровень шума осциллографа.
Сигнал, соответствующий неисправному источнику питания, будет иметь несколько уменьшенный пик на основной частоте и дополнительные выбросы, соответствующие гармоникам. Устранение этих гармоник приведет к улучшению работы двигателя.
Эти показания следует снимать при работающем двигателе и без него, и это является началом определения источника гармоник.Это хороший пример того, как ранние показания при нормальной работе двигателя важны для понимания дисплея осциллографа.
Управление трехфазным асинхронным двигателем с помощью частотно-регулируемого привода и ПЛК
Различные процессы автоматизации в промышленности требуют управления асинхронными двигателями переменного тока с помощью приводов переменного тока. Здесь представлена надежная система включения / выключения, изменения скорости и направления вращения промышленного трехфазного асинхронного двигателя с использованием частотно-регулируемого привода и ПЛК. Мы используем здесь моторный привод Delta AC для его работы.
Простая панель управления подключается с помощью ПЛК Allen Bradley для демонстрации. Также может быть разработана расширенная SCADA-система Wonderware для Intouch.
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. В случае трехфазного переменного тока наиболее широко используемым двигателем является трехфазный асинхронный двигатель, поскольку для этого типа двигателя не требуется никакого пускового устройства, поскольку он является самозапускающимся двигателем.
Рис. 1: Общий вид системы Рис. 2: Блок-схема приводаКакие есть приводы
Часто в промышленности возникает потребность в управлении скоростью 3-фазного асинхронного двигателя.Электроприводы переменного тока Delta могут эффективно управлять скоростью двигателя, улучшать автоматизацию машин и экономить энергию. Каждый привод в своей серии частотно-регулируемых приводов (VFD) разработан для удовлетворения конкретных потребностей применения.
Приводы переменного токаточно регулируют крутящий момент, плавно справляются с повышенными нагрузками и обеспечивают множество настраиваемых режимов управления и конфигурации. ЧРП может использоваться для изменения скорости, направления и других параметров трехфазного двигателя. Мы используем 2-проводной метод управления скоростью и направлением двигателя.
Работа частотно-регулируемого привода
Первая ступень частотно-регулируемого привода — это преобразователь, состоящий из шести диодов, которые похожи на обратные клапаны, используемые в водопроводных системах. Они позволяют току течь только в одном направлении; направление, указанное стрелкой в символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительно, чем напряжения фазы B или C, этот диод открывается и пропускает ток.
Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается.То же самое и с тремя диодами на отрицательной стороне шины. Таким образом, мы получаем шесть импульсов тока при открытии и закрытии каждого диода. Это называется 6-пульсным частотно-регулируемым приводом, который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Мы можем избавиться от пульсаций переменного тока на шине постоянного тока, добавив конденсатор. Конденсатор работает аналогично резервуару или аккумулятору в водопроводной системе. Он поглощает пульсации переменного тока и обеспечивает плавное постоянное напряжение.
Диодный мостовой преобразователь, преобразующий переменный ток в постоянный, иногда называют просто преобразователем.Преобразователь, который преобразует постоянный ток обратно в переменный, также является преобразователем, но, чтобы отличить его от диодного преобразователя, его обычно называют инвертором. В промышленности стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
Когда мы замыкаем один из верхних переключателей в инверторе, эта фаза двигателя подключается к положительной шине постоянного тока, и напряжение на этой фазе становится положительным. Когда мы замыкаем один из нижних переключателей преобразователя, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной.Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую мы хотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Рис. 3: Принципиальная схема ЧРП Рис. 4: Формы сигналов при различных рабочих частотах и средних напряженияхОбратите внимание, что выходной сигнал частотно-регулируемого привода имеет прямоугольную форму. ЧРП не выдают синусоидального сигнала. Эта прямоугольная форма волны не будет хорошим выбором для распределительной системы общего назначения, но вполне подходит для двигателя.
Если мы хотим снизить частоту двигателя, мы просто переключаем выходные транзисторы инвертора медленнее. Но если мы уменьшаем частоту, мы также должны уменьшать напряжение, чтобы поддерживать соотношение В / Гц. Это делает широтно-импульсная модуляция (ШИМ).
Представьте, мы могли бы контролировать давление в водопроводе, открывая и закрывая клапан на высокой скорости. Хотя это было бы непрактично для водопроводных систем, это очень хорошо работает для частотно-регулируемых приводов.
Обратите внимание, что в течение первого полупериода напряжение присутствует половину времени и выключено в остальное время.Таким образом, среднее напряжение составляет половину 480В, то есть 240В. Импульсируя выход, мы можем получить любое среднее напряжение на выходе частотно-регулируемого привода.
Выбор Delta VFD-M в качестве привода переменного тока
Рис. 5: Delta VFD-MDelta VFD-M — это векторный микропривод переменного тока без датчика. Его компактная конструкция идеальна для работы с двигателями малой и средней мощности. Привод M разработан для обеспечения сверхмалошумной работы и включает несколько инновационных технологий, снижающих помехи.
Этот привод может найти множество применений, таких как упаковочная машина, машина для приготовления пельменей, беговая дорожка, вентилятор с контролем температуры / влажности для сельского хозяйства и аквакультуры, миксер для пищевой промышленности, шлифовальный станок, сверлильный станок, малогабаритный гидравлический токарный станок, подъемник, оборудование для нанесения покрытий, малогабаритный фрезерный станок, роботизированный манипулятор литьевого станка (зажим), деревообрабатывающий станок (двусторонний строгальный станок), кромкогибочный станок, эластификатор и т. д.
Рис. 6: Схема подключения выводов VFD-M Рис. 7: Управление цифровой клавиатурой на Delta VFD-MШаги для полного управления двигателем
- Проверить соединения L1, L2, L3; T1, T2, T3 (используются для подачи 3-фазного входа на частотно-регулируемый привод и подключения к нему двигателя) и провода, выходящие из M0, M1 и GND.
- Включить трехфазное питание.
- Для программирования VFD-M:
(i) Нажмите Mode
(ii) На F60.0 нажмите Enter
(iii) Нажмите Mode
(iv) Выберите соответствующий параметр с помощью клавиш вверх / вниз на клавиатуре.
(v) Например, для Pr0 выберите P 00.
(vi) В соответствии с руководством установите параметры для требуемого режима работы
(vii) Нажмите EnterEnd
Примечание: В любой момент нажмите Mode, чтобы перейти к предыдущему шагу.
Для двигателя, работающего от внешнего управления, у нас есть три режима работы; два — 2-проводный метод, а один — 3-проводный. Помимо этого, существует метод по умолчанию, которым можно управлять с цифровой клавиатуры.
Сначала выполните пробный запуск, чтобы проверить все соединения.
Пробный пуск для ЧРП
Заводская установка источника управления — цифровая клавиатура (Pr.01 = 00). Вы можете выполнить пробный запуск с помощью цифровой клавиатуры, выполнив следующие действия:
- После подачи питания убедитесь, что на дисплее отображается F60.0Hz. Когда привод двигателя переменного тока находится в режиме ожидания, загораются светодиоды STOP и FWD.
- Нажмите кнопку «вниз», чтобы установить частоту 5 Гц.
- Нажмите кнопку запуска. Загораются светодиоды RUN и FWD, что указывает на поступление рабочей команды.А если вы хотите перейти на обратный ход, вам следует нажать кнопку «вниз». И если вы хотите замедлить, чтобы остановиться, нажмите кнопку остановки / сброса.
Программирование VFD-M
Есть два контакта, M0 и M1. Когда M0 закрыт, VFD переходит в рабочий режим. Если он открыт, двигатель не вращается. M1 определяет направление вращения. Если M1 открыт, он вращается в прямом направлении; если закрыт, то в обратном направлении.
Параметры для вышеуказанного режима установлены как:
пр.00 настроен на 01 (для управления главной частотой с помощью потенциометра)
Pr.01 настроен на 01 (внешнее управление, через M0, M1)
Pr.38 установлен на 01 (M0, M1 настроены как работа / останов и вперед / назад)
Задайте для Pr.00 значение 00 для управления основной частотой с помощью цифровой клавиатуры и 01 для управления с помощью потенциометра, прикрепленного, как показано на схеме подключения первого контакта.
Пар.38 должен быть установлен на 01, как показано на схемах выше.
После того, как все эти параметры установлены, следуйте рабочим шагам в 2-проводном режиме для запуска двигателя.
Рис. 8: Двухпроводный режим: только Пар.38 может быть установлен на «1» Рис.9: лестничная диаграмма для управления Использование ПЛК Рис. 10: Плата управления двигателем.Программируемые логические контроллеры (ПЛК) очень эффективно поддерживают цифровой ввод / вывод. Таким образом, ПЛК также можно использовать для управления работой частотно-регулируемого привода, а значит, и для управления подключенным трехфазным асинхронным двигателем.
Рис. 11: Подключение ПЛК Allen BradleyПЛК Allen Bradley MicroLogix 1000 подключен к Delta VFD-M и программируется с помощью лестничного программирования с использованием RS Logix.
Мы подключили M0 и M1 к O2 и O3 (выходам) ПЛК и управляем O2 и O3 с помощью лестничной логики. На рис. 4 показана логика, определенная для режима 01, то есть Pr.38 = 01. O: 0,0 / 2 подключен к M0.
Рис. 12: Изменение скорости асинхронного двигателя с помощью потенциометраКогда I: 0,0 / 2 установлено на, он переводит двигатель в рабочий режим. Теперь, даже если I: 0.0 / 2 выключен, O: 0.0 / 2 остается включенным из-за определенной логики. Остановить его можно только повторным нажатием I: 0.0 / 2.
I: 0,0 / 3 контролирует O: 0.0/5, который, в свою очередь, подключен к M1, который определяет направление вращения двигателя.
Рис. 13: Трехфазный асинхронный двигатель0: 0,0 / 3 — это светодиод, который загорается, когда двигатель находится в рабочем режиме.
0: 0,0 / 5 — это светодиод, который загорается, когда двигатель вращается в прямом направлении, и гаснет при обратном вращении.
Любите читать эту статью? Вам также может понравиться Создание системы управления ПК с использованием Wonderware InTouch SCADA и Allen Bradley PLCДжоби Энтони — магистр компьютерных технологий из США, в настоящее время работает инженером-инженером в ядерном межуниверситетском ускорительном центре (IUAC), Нью-Дели.Он также был приглашенным ученым в ЦЕРН, Женева,
.Акшай Кумар — студент технологического факультета Делийского технологического университета, Нью-Дели, в настоящее время стажер в IUAC
Эта статья была впервые опубликована 22 июля 2016 г. и недавно обновлена 27 декабря 2018 г.
Индукционный генератор| Учебники по альтернативной энергии
Индукционный генератор Статья Учебники по альтернативной энергии 19.06.2010 03.06.2021 Учебники по альтернативной энергииПоделитесь / добавьте в закладки с:
Индукционный генератор как ветрогенератор
Вращающиеся электрические машины обычно используются в ветроэнергетических установках, и большинство этих электрических машин могут работать как двигатель или как генератор, в зависимости от конкретного применения.Но помимо синхронного генератора , который мы рассматривали в предыдущем уроке, существует еще один более популярный тип трехфазной вращающейся машины, который мы можем использовать в качестве генератора ветровой турбины, называемый индукционным генератором .
Как синхронный генератор, так и индукционный генератор имеют аналогичное фиксированное расположение обмоток статора, которое при возбуждении от вращающегося магнитного поля выдает трехфазное (или однофазное) выходное напряжение.
Однако роторы двух машин сильно различаются: ротор индукционного генератора обычно состоит из одного из двух типов компоновки: «беличья клетка» или «ротор с обмоткой».
Однофазный индукционный генератор
Индукционный генератор Конструкция основана на очень распространенных машинах с асинхронными двигателями с короткозамкнутым ротором, поскольку они дешевы, надежны и легко доступны в широком диапазоне электрических размеров от машин с дробной мощностью до нескольких мегаватт, что делает их идеальными для использование как в бытовых, так и в коммерческих применениях возобновляемых источников энергии ветра.
Кроме того, в отличие от предыдущего синхронного генератора, который должен быть «синхронизирован» с электрической сетью, прежде чем он сможет вырабатывать электроэнергию, индукционный генератор может быть подключен непосредственно к электросети и приводиться в движение лопастями ротора турбин с переменной скоростью ветра, после чего он запускается. на линии из неподвижного состояния.
Для экономии и надежности во многих ветроэнергетических турбинах в качестве генератора используются асинхронные двигатели, приводимые в действие механической коробкой передач для увеличения скорости вращения, производительности и эффективности. Однако индукционным генераторам требуется реактивная мощность, обычно обеспечиваемая шунтирующими конденсаторами в отдельных ветряных турбинах.
Асинхронные машинытакже известны как асинхронные машины , то есть они вращаются ниже синхронной скорости при использовании в качестве двигателя и выше синхронной скорости при использовании в качестве генератора.Поэтому, когда он вращается быстрее, чем его нормальная рабочая скорость или скорость холостого хода, индукционный генератор вырабатывает электричество переменного тока. Поскольку индукционный генератор синхронизируется непосредственно с основной энергосистемой, то есть вырабатывает электроэнергию с той же частотой и напряжением, выпрямители или инверторы не требуются.
Однако индукционный генератор может обеспечивать необходимую мощность непосредственно в энергосистему общего пользования, но ему также необходима реактивная мощность, обеспечиваемая электросетью.Автономная (автономная) работа индукционного генератора также возможна, но недостатком здесь является то, что генератор требует дополнительных конденсаторов, подключенных к его обмоткам для самовозбуждения.
Трехфазные индукционные машины очень хорошо подходят для выработки энергии ветра и даже гидроэлектроэнергии. Индукционные машины, работая как генераторы, имеют неподвижный статор и вращающийся ротор, как и у синхронного генератора. Однако возбуждение (создание магнитного поля) ротора выполняется по-другому, и типичная конструкция ротора представляет собой структуру с короткозамкнутым ротором, в которой проводящие стержни встроены в корпус ротора и соединены друг с другом на своих концах посредством закорачивающих колец, как показано. .
Конструкция индукционного генератора
Как уже упоминалось в начале, одним из многих преимуществ асинхронной машины является то, что ее можно использовать в качестве генератора без каких-либо дополнительных схем, таких как возбудитель или регулятор напряжения, когда она подключена к трехфазной сети. Когда неработающий асинхронный генератор подключен к сети переменного тока, в обмотке ротора индуцируется напряжение, аналогичное трансформатору с частотой этого индуцированного напряжения, равной частоте приложенного напряжения.
Поскольку проводящие стержни ротора с короткозамкнутым ротором закорочены, вокруг них протекает большой ток, и внутри ротора создается магнитное поле, заставляющее машину вращаться.
Поскольку магнитное поле обоймы ротора следует за магнитным полем статора, ротор ускоряется до синхронной скорости, установленной частотой питания сети. Чем быстрее вращается ротор, тем меньше результирующая относительная разница скоростей между обоймой ротора и вращающимся полем статора и, следовательно, напряжение, наведенное на его обмотку.
Когда ротор приближается к синхронной скорости, он замедляется, поскольку ослабляющее магнитное поле ротора недостаточно для преодоления потерь на трение ротора в режиме холостого хода. В результате ротор теперь вращается медленнее, чем синхронная скорость. Это означает, что асинхронная машина никогда не сможет достичь своей синхронной скорости, поскольку для ее достижения не будет индуцированного тока в короткозамкнутой обойме ротора, магнитного поля и, следовательно, крутящего момента.
Разница в скорости вращения между вращающимся магнитным полем статоров и скоростью ротора называется в асинхронных машинах «скольжением».Для обеспечения крутящего момента на валу ротора должно существовать проскальзывание. Другими словами, «проскальзывание», которое является описательным способом объяснения того, как ротор постоянно «откатывается» от синхронизации, представляет собой разницу в скорости между синхронными скоростями статоров, выражаемую как: n s = ƒ / P в об / мин, а фактическая частота вращения роторов n R также в об / мин и выражается в процентах (скольжение в%).
Тогда относительное скольжение s асинхронной машины определяется как:
Это скольжение означает, что работа индукционных генераторов, таким образом, является «асинхронной» (несинхронизированной), и чем тяжелее нагрузка, приложенная к асинхронному генератору, тем выше результирующее скольжение, поскольку для более высоких нагрузок требуются более сильные магнитные поля.Большее скольжение связано с большим наведенным напряжением, большим током и более сильным магнитным полем.
Таким образом, для того, чтобы асинхронная машина работала как двигатель, ее рабочая скорость всегда будет меньше скорости вращения поля статора, а именно синхронной скорости. Чтобы асинхронная машина работала как генератор, ее рабочая скорость должна быть выше номинальной синхронной скорости, как показано на рисунке.
Характеристики крутящего момента / скорости индукционной машины
В состоянии покоя вращающееся магнитное поле статора имеет одинаковую скорость вращения по отношению как к статору, так и к ротору, поскольку частота ротора и токи статора одинаковы, поэтому в состоянии покоя скольжение положительно и равно единице (s = + 1).
При синхронной скорости разница между скоростью и частотой ротора и статора равна нулю, поэтому при синхронной скорости электричество не потребляется и не производится, а скольжение равно нулю (s = 0).
Если скорость генератора превышает эту синхронную скорость внешними средствами, результирующий эффект будет заключаться в том, что ротор будет вращаться быстрее, чем вращающееся магнитное поле статора, и полярность индуцированного напряжения и тока ротора изменится на противоположную.
В результате скольжение теперь становится отрицательным (s = -1), и индукционная машина генерирует ток с опережающим коэффициентом мощности обратно в электрическую сеть. Мощность, передаваемая в виде электромагнитной силы от ротора к статору, может быть увеличена простым вращением ротора быстрее, что затем приведет к увеличению количества вырабатываемой электроэнергии. Характеристики крутящего момента асинхронного генератора (s = от 0 до -1) являются отражением характеристик асинхронного двигателя (s = от +1 до 0), как показано.
Скорость индукционного генератора будет изменяться в зависимости от силы вращения (момента или крутящего момента), приложенной к нему энергией ветра, но он будет продолжать вырабатывать электричество до тех пор, пока его скорость вращения не упадет ниже скорости холостого хода. На практике разница между скоростью вращения при пиковой генерирующей мощности и на холостом ходу (синхронная скорость) очень мала, всего несколько процентов от максимальной синхронной скорости. Например, 4-полюсный генератор с синхронной частотой вращения холостого хода 1500 об / мин, подключенный к электросети с током 50 Гц, может производить свою максимальную генерируемую мощность, вращаясь только на 1–5% выше (от 1515 до 1575 об / мин). , легко достигается с помощью коробки передач.
Это очень полезное механическое свойство: генератор будет немного увеличивать или уменьшать свою скорость при изменении крутящего момента. Это означает, что редуктор будет меньше изнашиваться, что приводит к низким затратам на техническое обслуживание и долгому сроку службы, и это одна из наиболее важных причин для использования индукционного генератора , а не синхронного генератора на ветряной турбине, которая подключается напрямую. к электросети.
Автономный индукционный генератор
Выше мы видели, что индукционный генератор требует, чтобы статор был намагничен от электросети, прежде чем он сможет вырабатывать электричество.Но вы также можете запустить индукционный генератор в автономной автономной системе, подав необходимый противофазный ток возбуждения или намагничивания от конденсаторов возбуждения, подключенных к клеммам статора машины. Это также требует наличия некоторого остаточного магнетизма в пластинах железа ротора при запуске турбины. Типичная схема трехфазной индукционной машины с короткозамкнутым ротором для автономного использования показана ниже. Конденсаторы возбуждения показаны звездой (звездой), но также могут быть подключены треугольником (треугольником).
Конденсаторный индукционный генератор
Конденсаторы возбуждения представляют собой стандартные конденсаторы для запуска двигателя, которые используются для обеспечения необходимой реактивной мощности для возбуждения, которая в противном случае обеспечивалась бы электросетью. Индукционный генератор будет самовозбуждаться при использовании этих внешних конденсаторов только в том случае, если ротор имеет достаточный остаточный магнетизм.
В режиме самовозбуждения на выходную частоту и напряжение генератора влияют частота вращения, нагрузка турбины и значение емкости конденсаторов в фарадах.Затем, чтобы произошло самовозбуждение генератора, должна быть минимальная скорость вращения для значения емкости, используемой на обмотках статора.
«Самовозбуждающийся индукционный генератор» (SEIG) является хорошим кандидатом для использования в ветроэнергетических установках, особенно при переменной скорости ветра и в удаленных районах, поскольку им не требуется внешний источник питания для создания магнитного поля. Трехфазный индукционный генератор можно преобразовать в однофазный индукционный генератор с регулируемой скоростью, подключив два конденсатора возбуждения к трехфазным обмоткам.Одно из значений емкости C на одной фазе и другое значение 2C емкости на другой фазе, как показано.
Однофазный выход от трехфазного индукционного генератора
Таким образом, генератор будет работать более плавно, работая с коэффициентом мощности (PF), близким к единице (100%). В однофазном режиме можно получить КПД, близкий к трехфазному, что составляет примерно 80% от максимального номинала машины. Однако следует соблюдать осторожность при преобразовании трехфазного источника питания в однофазный, поскольку выходное линейное напряжение однофазной сети будет вдвое больше номинального напряжения обмотки.
Индукционные генераторыхорошо работают с однофазными или трехфазными системами, которые подключены к электросети, или в качестве автономных генераторов с самовозбуждением для небольших ветроэнергетических приложений, позволяющих работать с переменной скоростью. Однако индукционным генераторам требуется реактивное возбуждение для работы на полной мощности, поэтому они идеально подходят для подключения к коммунальной сети как часть связанной с сетью ветроэнергетической системы.
Чтобы узнать больше об «Индукционных генераторах» или получить дополнительную информацию об энергии ветра о различных доступных ветроэнергетических системах, или изучить преимущества и недостатки использования индукционных генераторов как части системы ветряных турбин, подключенных к сети, нажмите здесь, чтобы получить Ваш экземпляр одной из лучших книг по трехфазным индукционным генераторам с самовозбуждением прямо от Amazon.
Коммутация и методы управления двигателем
Сфера управления движением обычно не известна своими громкими открытиями или стремительными разработками. Конструкции двигателей, как правило, развиваются медленно, и инженеры по понятным причинам осторожны, когда дело доходит до изменения проверенных временем подходов. Однако в последнее время наблюдается уйма активности вокруг использования передовых методов контроля тока, особенно контроля с ориентацией на поле (FOC). Этот математический метод управления бесщеточными асинхронными двигателями постоянного и переменного тока стал основным направлением в отрасли управления движением из-за его потенциала для повышения производительности и снижения энергопотребления.
Управление с ориентацией на поле является значительным улучшением по сравнению со стандартным подходом для бесщеточных двигателей постоянного тока с трапецеидальной коммутацией по Холлу и имеет преимущество диапазона скоростей по сравнению с более сложной техникой синусоидальной коммутации. Для асинхронных двигателей переменного тока FOC является значительным улучшением по сравнению со стандартными методами привода с регулируемой скоростью и является двоюродным братом управления вектором магнитного потока, которое является в некоторой степени аналогичным методом управления недорогими трехфазными асинхронными двигателями переменного тока, чтобы заставить их работать так, как если бы они были больше дорогие бесщеточные двигатели постоянного тока.Фактически, многие производители используют эти два термина как синонимы.
По сравнению с другими типами серводвигателей, такими как DC Brush, которые до сих пор используются в ряде важных приложений, бесщеточные асинхронные двигатели постоянного и переменного тока обеспечивают большую удельную мощность, гораздо большую надежность, а в случае асинхронного двигателя переменного тока — меньшую стоимость. . Чтобы получить полный доступ к этим возможностям, дизайнеры и инженеры движения используют платформы быстрых алгоритмов в виде DSP (процессоров цифровых сигналов) и специализированных микропроцессоров для улучшения производительности и повышения эффективности.
В бесщеточных двигателях постоянного тока более высокая производительность означает более плавное движение и большую рабочую скорость. Потенциал асинхронных двигателей переменного тока еще более захватывающий. По сравнению с простым управлением «все включено / выключено», FOC означает, что двигатели могут работать более эффективно, иметь более оптимальный размер и работать с меньшим тепловыделением. Это также позволяет использовать такие функции, как изменение направления, и может позволить исключить внешнее оборудование, такое как тормоза или сцепления. Учитывая, что 60–65% всей энергии в США используется для привода электродвигателей, неудивительно, что рынок все больше требует более эффективных двигателей.
Магнитный аттракцион
С точки зрения создания крутящего момента хорошей рабочей моделью для большинства двигателей является простой стержневой магнит. Стержневой магнит вращается вокруг своего центра (моделируя ротор двигателя) и взаимодействует с магнитными полями, создаваемыми в статоре неподвижными неподвижными катушками. В бесщеточных двигателях постоянного тока магнитное поле ротора создается магнитами, установленными непосредственно на роторе. В асинхронных двигателях переменного тока магнитное поле ротора создается за счет индукции (отсюда и название двигателя) магнитных полей в статоре.Направление этого магнитного поля, в отличие от бесщеточного двигателя постоянного тока, изменяется в зависимости от нескольких факторов, включая частоту и ток возбуждения статора, скорость ротора и крутящий момент, испытываемый двигателем.
Обмотки статора для бесщеточных двигателей постоянного тока обычно имеют трехфазную конфигурацию, как и обмотки асинхронных двигателей переменного тока, используемых с оптоволоконными технологиями. В частности, для асинхронных двигателей переменного тока стоит отметить, что также используются другие конфигурации обмоток, в частности, однофазный асинхронный двигатель переменного тока.Этот двигатель является рабочей лошадкой, которую можно найти в большинстве семейных кондиционеров, холодильников, стиральных машин и сушилок, но он не поддается самым передовым методам векторного управления, поскольку обмотки статора не могут управляться индивидуально.
В любом случае, три фазы статора расположены на расстоянии 120 электрических градусов друг от друга. Это сумма силы, создаваемой этими тремя фазами, которая в конечном итоге приводит к полезному вращению двигателя. В зависимости от того, как отдельные магнитные катушки расположены по фазе, они могут взаимодействовать, создавая силу, не создающую крутящего момента, или они могут создавать силу, которая приводит во вращение.Эти два различных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств с обратной связью по положению) действуют перпендикулярно полюсной оси ротора, а не создающие крутящего момента прямые силы, действующие параллельно оси полюса ротора. На Рисунке 1 это показано.
Уловка для создания вращения состоит в том, чтобы максимизировать Q (квадратуру) при минимизации D (прямого) крутящего момента. В случае бесщеточного двигателя постоянного тока это, по крайней мере, концептуально, просто, потому что бесщеточные двигатели постоянного тока имеют магниты, установленные непосредственно на роторе.Таким образом, если угол ротора измеряется с помощью датчика Холла или датчика положения, направление магнитного поля от ротора известно. Все становится более интересным для приложений управления скоростью и крутящим моментом, где применяется бессенсорное управление. Поскольку прямые механические измерения положения ротора недоступны, угол должен быть выведен из профиля напряжения обратной ЭДС на трех обмотках. Хотя это и нетривиально, управление противо-ЭДС в наши дни довольно распространено. Однако помните, что обратная ЭДС требует, чтобы двигатель вращался, поэтому она не подходит для приложений позиционирования, которые должны удерживаться в устойчивом положении.
В случае асинхронного двигателя переменного тока используется аналогичный подход, однако из-за дополнительных требований по поддержанию некоторого количества индуктивного потока сила D приводится не к нулю, а к небольшому постоянному значению, характерному для мотор. Кроме того, измерения местоположения ротора с помощью датчиков Холла или энкодера недостаточно для определения магнитного угла ротора, поскольку он не сообщает нам эффективный угол магнитного поля, создаваемого ротором. Напомним, что это магнитное поле индуцировано и поэтому постоянно изменяется.
Эта разница между положением ротора и магнитным углом ротора называется углом скольжения. Чем больше фактический крутящий момент на двигателе, тем больше величина скольжения и, следовательно, больше компенсирующий крутящий момент двигателя. Это равновесие мало чем отличается от работы гидростатической трансмиссии. Чем больше разница в скорости между двигателем и колесами, тем больше крутящий момент, создаваемый трансмиссией. Это означает, что скорость вращения двигателя будет меньше частоты вращения статора.
Для приложений, в которых обычно используется индукция переменного тока, таких как кондиционеры, стиральные машины, сушилки и т. Д., Снижение скорости двигателя с пониженным проскальзыванием не является проблемой. Но для приложений позиционирования или для работы двигателя с максимальным КПД это скольжение необходимо явно контролировать. Есть несколько способов сделать это, но все они требуют измерения или оценки индуцированного электрического поля ротора. Еще раз, распространенный способ добиться этого — использовать методы обратной ЭДС. Другой популярный подход известен как управление вектором магнитного потока, которое измеряет механический угол ротора и пытается вычислить магнитный угол ротора алгоритмически, используя оценки различных характеристик двигателя.
Поле ориентированного контроля сновидений
Управление, ориентированное на поле, стало важным подходом к управлению приводом / коммутацией для бесщеточных двигателей постоянного тока, а также для асинхронных двигателей переменного тока, поскольку оно обеспечивает широкий диапазон используемых скоростей двигателя. Поучительно сравнить FOC с ранее наиболее распространенным методом для бесщеточных двигателей постоянного тока — синусоидальной коммутацией.
На рисунке 2 (ниже) показаны схемы управления как для синусоидальной коммутации, так и для управления, ориентированного на поле.В подходе с синусоидальным управлением команда крутящего момента «векторизуется» через синусоидальную справочную таблицу, тем самым создавая отдельную команду для каждой обмотки двигателя. По мере продвижения ротора угол обзора увеличивается. Как только векторизованная команда фазы сгенерирована, она передается в токовый контур, по одному для каждой обмотки, который пытается поддерживать фактический ток обмотки на желаемом значении тока.
Важной особенностью этого подхода является то, что с увеличением частоты вращения двигателя возрастает сложность поддержания желаемого тока.Это связано с тем, что токовый контур напрямую «видит» частоту вращения, и любое отставание в токовом контуре, определенное количество которого неизбежно, приводит к ошибке между желаемым крутящим моментом статора и фактическим. Это отставание, незначительное при низких скоростях вращения, приводит к увеличению количества D (нежелательного) крутящего момента при более высоких скоростях вращения, что приводит к уменьшению доступного крутящего момента.
Схема управления для подхода, ориентированного на поле, отличается тем, что токовая петля происходит без привязки к вращению двигателя.То есть независимо от вращения двигателя. В подходе FOC есть две фактические токовые петли, одна для крутящего момента Q и одна для крутящего момента D. Контур крутящего момента Q управляется желаемым пользователем крутящим моментом от сервоконтроллера. Контур D приводится в действие нулевой входной командой, чтобы минимизировать нежелательную прямую составляющую крутящего момента.
Уловка для выполнения всей этой работы — это интенсивные математические операции преобразования, известные как Преобразования Парка и Кларка , которые преобразуют векторизованный фазовый угол в опорный кадр D и Q без привязки.Это делается дважды: один раз для преобразования выходных сигналов контуров управления D и Q в команду трехфазного двигателя и один раз для преобразования измерения угла ротора обратно в кадры D и Q. Хотя об этих преобразованиях известно уже много лет, их практическая реализация в бесщеточных индукционных приводах постоянного и переменного тока требует появления дешевых, высокопроизводительных DSP и микропроцессоров.
Теперь, когда они доступны, асинхронные двигатели переменного тока, в которых используется метод ВОК, могут развивать КПД двигателя более 85%, по сравнению с примерно 60% для подходов, не ориентированных на поле.Для сравнения, бесщеточные двигатели, использующие подход FOC, могут достигать еще более высокого КПД — до 95%. Синусоидальная коммутация для бесщеточных двигателей постоянного тока также работает очень эффективно, но не так эффективно, как FOC, в самом высоком диапазоне скоростей двигателя.
Где магнитное поле падает на дорогу
С практической точки зрения, ваш выбор двигателя и усилителя часто будет определять метод управления, который вы будете использовать.
Если вы используете бесщеточный двигатель постоянного тока для позиционирования, бессенсорное управление не подходит.Вам понадобится энкодер и, скорее всего, датчик Холла. Если вы хотите получить от своего двигателя максимальную производительность, вы будете стремиться к управлению, ориентированному на поле. Однако, если вы не готовы создать свой собственный усилитель (что является сложной задачей для большинства), вы купите диск в комплекте со встроенной этой функцией.
В этой конфигурации привод обычно включает высокоуровневые функции управления движением, такие как создание профиля, контур сервопривода положения и входы и выходы в стиле ПЛК.Существует ряд компактных одноосных приводов, которые предлагают управление по Холлу, синусоидальное или полевое управление. Эти приводы обычно располагаются на RS / 485, CANbus, Ethernet или другой последовательной шине. Все, что вам нужно сделать, это подключить двигатель и питание и отправить команды.
Если вы используете карточный подход, будь то купленный вами или разработанный вами, ваша способность применять ориентированный на поля контроль ограничена. Это связано с тем, что большинство стандартных усилителей вводят аналоговый управляющий сигнал +/- 10 В и не обеспечивают управление, ориентированное на поле.Те, которые есть, обычно дороги, потому что они включают в себя множество функций, которые вы не будете использовать, имея отдельную карту движения. Однако есть хорошие новости: есть ряд поставщиков, которые предлагают управление синусоидальной коммутацией. Это можно сделать в плате управления движением, выдав два аналоговых сигнала +/- 10 В, представляющих требуемый ток фазы A и B. Для многих приложений синусоидальная коммутация обеспечивает значительное улучшение по сравнению с 6-ступенчатой коммутацией на основе Холла и по-прежнему является отличным выбором для широкого диапазона приложений движения.
Если вы используете бесщеточные двигатели постоянного тока для управления скоростью, например, в центрифугах, ленточных накопителях или других приложениях, не связанных с позиционированием, у вас есть несколько вариантов дизайна. Бессенсорное управление, безусловно, возможно, хотя приводы, которые предлагают бессенсорное управление, ориентированное на поле, все еще редки. Чаще встречаются бессенсорные приводы, которые обеспечивают синусоидальную функцию коммутации. Их можно приобрести на уровне IC или на уровне привода.
Если вы работаете с асинхронными двигателями переменного тока, вы, вероятно, разрабатываете приложения для управления скоростью или крутящим моментом, а не для приложений позиционирования.Много обсуждается в технических журналах, практические примеры использования асинхронных двигателей переменного тока для позиционирования редки, за исключением некоторых специализированных областей, таких как приводы очень большой мощности.
В любом случае, у вас есть выбор, но обычно они подразделяются на подход «спроектируйте самостоятельно» или подход «купи драйв». Если вы решите купить привод, у вас будет широкий выбор уровней производительности от простых инверторов с регулировкой скорости до очень сложных приводов, ориентированных на поле, и приводов с вектором магнитного потока.
Если вы решите создать свою собственную плату контроллера или усилитель, простого регулирования скорости не так уж и сложно добиться, если вы знакомы с базовой конструкцией инвертора и методами переключения MOSFET или IGBT. Для более продвинутых проектов вы можете обратиться к доступным стандартным ИС для выполнения ориентированного на поле управления асинхронными двигателями переменного тока.
Сводка
Развитие технологий управления движением, растущий спрос на энергоэффективность и доступные недорогие микропроцессоры в совокупности значительно подняли планку производительности бесщеточных асинхронных двигателей постоянного и переменного тока.Независимо от того, создаете ли вы свой собственный контроллер или покупаете готовый продукт, знание того, как реализовать эти новые подходы, важно для максимизации рентабельности и минимизации времени разработки проекта.
Вас также может заинтересовать:
Будьте впереди конкурентов.
Если ваше существующее оборудование требует повышения производительности или если вам нужно разработать новый продукт в кратчайшие сроки, узнайте о решениях для управления движением от Performance Motion Devices.
- 2-кратное ускорение разработки
- Решения движения от микросхем до плат под ключ
- Простота внедрения
- Всегда поддерживается
Введение в контроллер частотно-регулируемого привода для асинхронного двигателя
Введение
Однофазные асинхронные двигатели широко используются в бытовой технике и промышленных устройствах управления. Однофазный асинхронный двигатель с постоянным разделенным конденсатором (PSC) является самым простым и наиболее широко используемым двигателем этого типа.
По конструкции двигатели PSC однонаправленные, что означает, что они предназначены для вращения в одном направлении. Направление вращения можно изменить путем добавления дополнительных обмоток, внешних реле и переключателей или использования зубчатых передач. В этой идее мы подробно обсудим, как управлять скоростью двигателя PSC в обоих направлениях с помощью микроконтроллера PIC16F72 и силовой электроники.
Микроконтроллер PIC16F72 был выбран потому, что это один из самых простых и недорогих микроконтроллеров общего назначения, которые Microchip имеет в своем портфолио.Несмотря на то, что он не имеет аппаратных ШИМ для управления дополнительными выходами ШИМ со вставленной зоной нечувствительности, все ШИМ генерируются в микропрограммном обеспечении с использованием таймеров и выводятся на выходные выводы общего назначения.
Что такое частотно-регулируемый привод?
Частотно-регулируемый привод или ЧРП — это способ, который позволяет управлять скоростью асинхронного двигателя, применяя переменную частоту переменного напряжения питания. Управляя выходной частотой переменного тока, можно управлять двигателем с разными скоростями в зависимости от требований.Это приводы с регулируемой скоростью, которые широко используются в промышленных приложениях, таких как насосы, системы вентиляции, лифты, приводы станков и т. Д. Это, по сути, энергосберегающая система. Поэтому первое требование — генерировать синусоидальную волну с разными частотами для VFD.
Какая технология используется в ЧРП?
Это система, которая выдает выход переменного тока с переменной частотой для управления скоростью двигателя в соответствии с потребностями. Однофазные преобразователи частоты более распространены, поскольку большинство устройств работают от однофазного источника переменного тока.Он состоит из двухполупериодного мостового выпрямителя для преобразования 230/110 В переменного тока примерно в 300/150 В постоянного тока. Выходной постоянный ток мостового выпрямителя сглаживается сглаживающим конденсатором большой емкости для удаления пульсаций переменного тока. Это постоянное постоянное напряжение затем подается в схему генерации частоты, образованную транзисторами MOSFET (металлооксидный полевой транзистор) / IGBT (биполярный транзистор с изолированным затвором). Эта схема MOSFET / IGBT принимает постоянный ток и преобразует его в переменный ток с переменной частотой для управления скоростью устройства.
Изменение частоты может быть достигнуто с помощью электронных схем или микроконтроллера. Эта схема изменяет частоту напряжения (ШИМ), подаваемого на привод затвора схемы MOSFET / IGBT. Таким образом на выходе появляется переменное напряжение переменной частоты. Микроконтроллер можно запрограммировать на изменение выходной частоты в соответствии с потребностями.
Система ЧРП:
Устройство переменной частоты состоит из трех частей, таких как двигатель переменного тока, контроллер и рабочий интерфейс.
Двигатель переменного тока, используемый в частотно-регулируемом приводе, обычно является трехфазным асинхронным двигателем, хотя в некоторых системах используется однофазный двигатель. Обычно используются двигатели, предназначенные для работы с фиксированной скоростью, но некоторые конструкции двигателей обеспечивают лучшую производительность в VFD, чем стандартная конструкция.
Контроллер представляет собой твердотельную схему электронного преобразователя мощности для преобразования переменного тока в постоянный, а затем в квазисинусоидальный переменный ток. Первая часть — это секция преобразователя переменного тока в постоянный, имеющая двухполупериодный выпрямительный мост, обычно трехфазный / однофазный двухполупериодный мост.Это промежуточное звено постоянного тока затем преобразуется в квазисинусоидальный переменный ток с помощью схемы переключения инвертора. Здесь MOSFET / IGBT транзисторы используются для преобразования постоянного тока в переменный.
Секция инвертора преобразует постоянный ток в три канала переменного тока для привода трехфазного двигателя. Секция контроллера также может быть спроектирована так, чтобы обеспечить улучшенный коэффициент мощности, меньшие гармонические искажения и низкую чувствительность к переходным процессам входного переменного тока.
Управление вольт / Гц:
Схема контроллера регулирует частоту переменного тока, подаваемого на двигатель, с помощью метода управления вольт на герц.Электродвигатель переменного тока требует переменного подаваемого напряжения при изменении частоты для достижения заданного крутящего момента. Например, если двигатель рассчитан на работу с напряжением 440 вольт при 50 Гц, то переменный ток, подаваемый на двигатель, должен быть уменьшен до половины (220 вольт), когда частота изменится на половину (25 Гц). Это регулирование основано на вольт / Гц. В приведенном выше случае соотношение составляет 440/50 = 8,8 В / Гц.
Другие методы управления напряжением:
Помимо управления вольт / Гц, для управления скоростью двигателя также используются более продвинутые методы, такие как прямое управление крутящим моментом или DTC, пространственно-векторная широтно-импульсная модуляция (SVPWM) и т. Д.Управляя напряжением в двигателе, можно точно контролировать магнитный поток и крутящий момент. В методе ШИМ инверторные переключатели создают квазисинусоидальную волну через серию узких импульсов с псевдосинусоидальной изменяющейся длительностью импульсов.
Рабочий интерфейс:
Этот раздел позволяет пользователю запускать / останавливать двигатель и регулировать скорость. Другие возможности включают реверсирование двигателя, переключение между ручным и автоматическим управлением скоростью и т. Д. Рабочий интерфейс состоит из панели с дисплеем или индикаторами и измерителями для отображения скорости двигателя, приложенного напряжения и т. Д.Для управления системой обычно предоставляется набор клавишных переключателей.
Встроенный плавный пуск:
В обычном асинхронном двигателе, включенном с помощью переключателя переменного тока, потребляемый ток намного выше номинального значения и может увеличиваться с увеличением ускорения нагрузки для достижения полной скорости двигателя. .
С другой стороны, в двигателе, управляемом частотно-регулируемым приводом, сначала применяется низкое напряжение с низкой частотой. Эта частота и напряжение увеличиваются с контролируемой скоростью для ускорения нагрузки.