Принцип действия асинхронного электродвигателя — советы электрика
Электрический двигатель — принцип работы электродвигателя
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Содержание:
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.


Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.
Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.
Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусм

формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
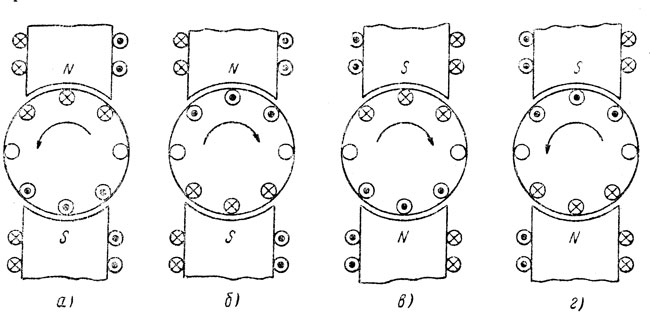
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Что такое электродвигатель? Как работает датчик вращения?
Последовательность Фибоначчи
Последовательность Фибоначчи Предметная область Связанный модуль Связанный урок Название занятия Заголовок Алгебра, Решение проблем, Наука и технологии Роботы Фибоначчи Уровень 7 (6-8) Зависимость деятельности
Дополнительная информацияРоботизированная рука на базе LEGO NXT
Электронный бюллетень buda University Vol.2, No. 1, 2011 г. Роботизированная рука на основе LEGO NXT Акос Хамори, Янош Лендьел, Университет Барна Реско Обуда [email protected], [email protected], [email protected]
Дополнительная информацияПотенциальная и кинетическая энергия
Потенциальная и кинетическая энергия Предметная область Связанная единица Связанное занятие Занятие Измерение названия, количество и операции, рассуждения и доказательства, а также наука и технология Нет Нет Это потенциал или
Дополнительная информацияИнструкции по сборке: робот-лабиринт
Инструкции по сборке: базовый дизайн робота-лабиринта из: Создание роботов с помощью Lego Mindstorms Изменения: Дэвид Ван. Диаграммы и инструкции: Дэвид Ван. Диаграммы и инструкции, созданные: MLCad,
. Дополнительная информацияУскорение силы тяжести
Ускорение из-за силы тяжести. Предметная область (-ы) Связанный блок Связанный урок Занятие Название Заголовок Физика, математические измерения g Вставьте сюда изображение 1, выровненное по правому краю Изображение 1 Описание ADA: учащиеся измеряют
Дополнительная информацияLEGO ROBOTICS для ЮНЫХ НАЧИНАЮЩИХ
LEGO ROBOTICS для МОЛОДЫХ НАЧИНАЮЩИХ A LEGOLAND, Калифорния, учебные ресурсы, классы 1-3 Содержание Добро пожаловать Page 1 Общие сведения Page 2 Открытия и обучение: простые машины и
Дополнительная информацияПОДКЛЮЧЕНИЕ УРОКОВ СТАНДАРТ NGSS
ПОДКЛЮЧЕНИЕ УРОКОВ К СТАНДАРТАМ NGSS 1 В этой таблице представлен обзор стандартов NGSS, которые могут быть выполнены или расширены для решения конкретных задач STEAM Student Set.Информация о том, как выполнить
Дополнительная информацияпонимание датчиков
В комплект робототехники LEGO MINDSTORMS NXT 2.0 входят три типа датчиков: ультразвуковой, сенсорный и цветной. Вы можете использовать эти датчики для создания робота, который издает звуки, когда видит вас, или для создания транспортного средства
Дополнительная информацияРОБОТОТЕХНИКА И АВТОНОМНЫЕ СИСТЕМЫ
Робототехника И АВТОНОМНЫЕ СИСТЕМЫ Саймон Парсонс, факультет компьютерных наук Ливерпульского университета ЛЕКЦИЯ 3 ПРОГРАММИРОВАНИЕ РОБОТОВ comp329-2013-parsons-lect03 2/50 Сегодня Перед началом лабораторных работ в понедельник,
Дополнительная информацияПлан урока.Подготовка
План урока Название курса: Обслуживание компьютера Название занятия: Жесткие диски Продолжительность урока: 90 минут Цель выступления: По завершении этого задания ученик сможет распознать
Дополнительная информацияСистема Somero SiteShape
Somero SiteShape System www.somero.com [email protected] Somero Enterprises, LLC Корпоративный офис: 82 Fitzgerald Drive Jaffrey, NH 03452 603532 5900 — телефон 603532 5930 — факс The Somero SiteShape System
Дополнительная информацияИсследование технологий-I
Technology Exploration-I ПОДГОТОВЛЕНО Academic Services Август 2011 Высшие школы прикладных технологий, 2011 Цели модуля После завершения этого модуля студент должен уметь: определять шкивы.
Дополнительная информацияГосударственные школы Hazlet Township
ГОСУДАРСТВЕННЫЕ ШКОЛЫ Hazlet Township КУРС ИЗУЧЕНИЯ ПО «Конструирование компьютеров II и робототехнике», июнь 2009 г. Николас Формика НОМЕР И НАЗВАНИЕ УСТРОЙСТВА: 1, Введение и начальная конфигурация. Дополнительная информация
ШЕСТЕРНИ И РЕДУКТОРЫ
Этот файл предназначен для ознакомления с основными концепциями шестерен и шкивов.Охватываемые области включают прямозубые шестерни, составные шестерни, цепную передачу, реечные системы и системы шкивов. ШЕСТЕРНИ И РЕДУКТОРНЫЕ СИСТЕМЫ Шестерня
Дополнительная информацияСоздание лучшего робота
http://tinyurl.com/betterro Создание лучшего робота Советы и методы для создания отличного робота Вес и баланс Слишком большой вес на неприводном колесе (колесах) Трудно делать повороты Требуется больше силы для преодоления
Дополнительная информацияСерво информация и центрирование
Информация и центрирование Сервопривод — это механическое моторизованное устройство, которому можно дать указание переместить выходной вал, прикрепленный к сервоприводу или рычагу, в заданное положение.Внутри сервопривода находится двигатель постоянного тока
. Дополнительная информацияФи: Золотое сечение
Фи: Золотое сечение Тематические области Связанные единицы Связанный урок Название занятия Заголовок Алгебра, измерения, числа и операции Знакомство с Фи Уровень 7 (6-8) Зависимость от занятия Требуется время
Дополнительная информацияБазовый урок по отслеживанию линий
Базовый урок по отслеживанию линии Теперь, когда вы знакомы с несколькими ключевыми датчиками NXT, давайте сделаем с ними что-нибудь более интересное.Этот урок покажет вам, как использовать датчик освещенности для отслеживания
. Дополнительная информацияРезиновая лента гоночная машина
Подразделение по физике гоночного автомобиля с резиновой лентой с использованием LEGO Mindstorms NXT Copyright 2009 by Technically Learning 1 из 17 Обзор: С помощью серии практических заданий учащиеся создадут резинку
Дополнительная информацияЭлектричество и магнетизм 11: Моторный эффект электрический ток Флеминга правило левой руки — приложения e.грамм. Электродвигатель и громкоговоритель Редакция Доктора Брауна по физике: GCSE Physics, IGCSE физика, O уровень & ~ Школьные курсы естественных наук для 9-10 классов в США или их эквиваленты для ~ 14-16 лет студенты Эта страница поможет вам ответить на вопросы например … Почему токоведущий провод испытывает сила при помещении в магнитное поле? Что такое правило левой руки Флеминга? Как работает простой электродвигатель? Как работает громкоговоритель? Подиндекс этой страницы
1.Моторный эффект — взаимодействие токоведущего провода и магнита
ВЕРХ СТРАНИЦЫ и субиндекс 2.Прогнозирование Направление максимальной силы — направление движения в двигательном эффекте
ВЕРХ СТРАНИЦЫ и субиндекс 3. Расчет размер создаваемой силы по моторному эффекту
ВЕРХ СТРАНИЦЫ и субиндекс 4. Простой постоянный ток. электрический мотор — применение моторного эффекта — применение электродвигателей
Электровоз INTERCITY компании British Railways имеет максимальное скорость 140 миль в час (225 км / час), полученная от 4700 кВт а.c. электрический двигатель питание от воздушных линий электропередачи 25 кВ. Обратите внимание, что электродвигатели могут быть переменный ток или d.c. текущий управляемый. 5. Простой переменный ток. электродвигатель
ВЕРХ СТРАНИЦЫ и субиндекс 6 . Громкоговоритель — приложение моторного эффекта
ВЕРХ СТРАНИЦЫ и субиндекс Что дальше? Электричество и ревизия магнетизма индекс нот
GCSE примечания к пересмотру физики о моторном влиянии электрического тока Применение правила левой руки Флеминга в громкоговорителе с электродвигателем, версия IGCSE Замечания о моторном эффекте электрического тока Правило левой руки Флеминга применения электрический двигатель громкоговоритель KS4 физика Научные заметки о моторный эффект электрического тока правило левой руки Флеминга приложения электрический двигатель громкоговоритель GCSE руководство по физике Замечания о моторном эффекте электрического тока Правило левой руки Флеминга приложения электрический двигатель громкоговоритель для школ колледжи академии естественные науки преподаватели изображений картинки-схемы для моторного воздействия электрического тока Флеминга применение правила левой руки электродвигатель громкоговоритель наука пересмотр примечания на моторный эффект электрического тока правило левой руки Флеминга приложения электрический двигатель громкоговоритель для пересмотра физических модулей физика темы заметки, чтобы помочь в понимании моторный эффект электрического тока правило левой руки Флеминга приложения электрический двигатель громкоговоритель университетские курсы физики карьера в области науки и физики вакансии в машиностроении технический лаборант стажировка инженер стажировка по физике США 8 класс 9 класс 10 AQA Заметки к редакции по физике GCSE 9-1 о двигательном эффекте электрический ток Применение правила левой руки Флеминга электрическое моторный динамик GCSE заметки о моторном действии электрического тока Левая рука Флеминга правила применения электродвигатель громкоговоритель Edexcel GCSE 9-1 физика наука пересмотр примечания на моторный эффект электрического тока правило левой руки Флеминга приложения электрический двигатель громкоговоритель для OCR GCSE 9-1 21 век записки физики о моторном действии электрического тока Применение правила левой руки Флеминга в громкоговорителе с электродвигателем OCR GCSE 9-1 Шлюз физики исправления по моторному эффекту электрического тока Флеминга левостороннее применение электрический двигатель громкоговоритель WJEC gcse наука CCEA / CEA gcse science Примечания к редакции физики GCSE на моторный эффект электрического тока правило левой руки Флеминга применение электродвигатель громкоговоритель ВЕРХ СТРАНИЦЫ и субиндекс |
Классификация электродвигателей ~ электрическое ноу-хау
В предыдущей теме » Электрооборудование Основные компоненты двигателей «, я объяснил конструкцию и основные компоненты основных типов двигателей; Двигатели переменного и постоянного тока.
Сегодня я объясню различные типы электродвигателей в мире следующим образом.
Основные типы двигателей
Электродвигатели в целом подразделяются на две следующие категории:
- Двигатели переменного тока.
- Двигатели постоянного тока.
Типы двигателей
Примечания: В последнее время, с развитием экономичных и надежных силовых электронных компонентов, появилось множество способов конструировать двигатель, и классификации этих двигателей стали менее строгими, и появилось много других типов двигателей.Наша классификация двигателей будет максимально полной.
Первый: двигатели постоянного тока
| Двигатели постоянного тока |
Системы питания постоянного тока не очень распространены в современной инженерной практике. Однако двигатели постоянного тока использовались в промышленности в течение многих лет. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, лифтами, экструдерами, морскими приборами, погрузочно-разгрузочными работами, бумагой, пластмассами, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Преимущества двигателей постоянного тока:
- Их скорость легко контролировать в широком диапазоне; Исторически сложилось так, что их характеристики крутящий момент — скорость было легче адаптировать, чем характеристики двигателей всех категорий переменного тока. Вот почему большинство тяговых и серводвигателей были машинами постоянного тока. Например, двигатели для привода рельсовых транспортных средств до недавнего времени были исключительно машинами постоянного тока.
- Их уменьшенные габаритные размеры позволяют значительно экономить место, что позволяет изготовителю машин или установок не зависеть от чрезмерных размеров круговых двигателей.
Недостатки двигателей постоянного тока
- Так как им нужны щетки для подключения обмотки ротора. Происходит износ щеток, который резко увеличивается в среде с низким давлением. Поэтому их нельзя использовать в искусственных сердцах. При использовании в самолете щетки потребуют замены через один час работы.
- Искры от щеток могут вызвать взрыв, если в окружающей среде содержатся взрывчатые вещества.
- Радиочастотный шум от щеток может мешать работе расположенных поблизости телевизоров, электронных устройств и т. Д. Двигатели постоянного тока
- также дороги по сравнению с двигателями переменного тока.
Таким образом, во всех применениях двигателей постоянного тока используется механический переключатель или коммутатор для преобразования постоянного или постоянного тока на клеммах в переменный ток в якоре машины. Поэтому машины постоянного тока еще называют коммутирующими машинами.
Типы двигателей постоянного тока:
| Типы двигателей постоянного тока |
Двигатели постоянного тока делятся в основном на:
- Щеточные двигатели постоянного тока (BDC).
- Бесщеточные двигатели постоянного тока (BLDC).
1. A Электродвигатели постоянного тока с щетками
| Электродвигатели с щетками постоянного тока |
Щеточный двигатель постоянного тока (BDC) — это электродвигатель с внутренней коммутацией, предназначенный для работы от источника постоянного тока.
Применения:
Двигатели постоянного тока с щеткой широко используются в различных областях, от игрушек до автомобильных сидений с кнопочной регулировкой.
Преимущества:
Щеточные двигатели постоянного тока (BDC) недороги, просты в управлении и доступны во всех размерах и формах
Конструкция :
| Конструкция электродвигателя постоянного тока с щеткой |
1- Статор
Статор создает постоянное магнитное поле, окружающее ротор.Это поле создается постоянными магнитами или электромагнитными обмотками.
2- Ротор
| Ротор (якорь) |
Ротор, также называемый якорем, состоит из одной или нескольких обмоток. Когда эти обмотки находятся под напряжением, они создают магнитное поле. Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, создаваемым статором, заставляя ротор вращаться.Когда двигатель вращается, обмотки постоянно находятся под напряжением в различной последовательности, так что магнитные полюса, генерируемые ротором, не выходят за пределы полюсов, генерируемых в статоре. Такое переключение поля в обмотках ротора называется коммутацией.
3- Щетки и коммутатор
Типы двигателей BDC:
Различные типы двигателей BDC различаются конструкцией статора или способом подключения электромагнитных обмоток к источнику питания. Вот эти типы:
A- Постоянный магнит
Двигатель постоянного тока с постоянным магнитом (PMDC) — это двигатель, полюса которого сделаны из постоянных магнитов для создания поля статора. Преимущества:
Недостатки:
B- Шунтирующий
Двигатели постоянного тока с шунтовой обмоткой (SHWDC) имеют катушку возбуждения, параллельную (шунтирующую) якорю. Скорость практически постоянна независимо от нагрузки и поэтому подходит для коммерческих приложений с низкой пусковой нагрузкой, таких как центробежные насосы, станки, нагнетательные вентиляторы, поршневые насосы и т. Д. Преимущества:
Недостатки:
С-серия с обмоткой
Двигатели постоянного тока с щеткой (SWDC) с последовательной обмоткой имеют катушку возбуждения, включенную последовательно с якорем.Эти двигатели идеально подходят для применений с высоким крутящим моментом, таких как тяговые транспортные средства (краны и подъемники, электропоезда, конвейеры, лифты, электромобили), поскольку ток как в статоре, так и в якоре увеличивается под нагрузкой. Преимущества:
Недостатки:
D- Составная рана
Двигатели с комбинированной обмоткой (CWDC) представляют собой комбинацию двигателей с параллельной обмоткой и двигателей с последовательной обмоткой. Двигатели CWDC используют как последовательное, так и шунтирующее поле.Двигатель CWDC представляет собой комбинацию двигателей SWDC и SHWDC. Двигатели CWDC имеют более высокий крутящий момент, чем двигатель SHWDC, но при этом обеспечивают лучшее управление скоростью, чем двигатель SWDC. Используется в таких приложениях, как прокатные станы, внезапные временные нагрузки, тяжелые станки, штампы и т. Д. Преимущества:
Недостатки:
E- Двигатель постоянного тока с независимым возбуждением
В двигателе постоянного тока с независимым возбуждением катушки возбуждения питаются от независимого источника, такого как двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Электродвигатель постоянного тока с отдельным возбуждением иногда использовался в тяговых электродвигателях постоянного тока для облегчения контроля проскальзывания колес. F- Универсальный двигатель
Универсальный двигатель представляет собой вращающуюся электрическую машину, аналогичную двигателю постоянного тока, предназначенную для работы от источника постоянного или переменного тока. Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель разработан для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемник. Серводвигатели G
Сервомоторы Серводвигатель в основном состоит из двигателя постоянного тока, зубчатой передачи, датчика положения, который в основном представляет собой потенциометр, и управляющей электроники.
В следующей теме я объясню Бесщеточный двигатель постоянного тока (BDLC) и двигатели переменного тока типа . Итак, продолжайте следить. Примечание: эти темы о двигателях в этом курсе EE-1: Курс электрического проектирования для начинающих является введением только для новичков, чтобы получить общую базовую информацию о двигателях и насосах как типе силовых нагрузок.Но на других уровнях наших курсов по электрическому проектированию мы будем показывать и подробно объяснять расчеты нагрузок на двигатели и насосы. типов электродвигателей | ЭлектродвигательЭлектродвигатели можно различить по типу источника питания: Классическое деление — двигатели постоянного (DC) и переменного (AC) тока. Однако это не очень точная классификация, так как есть двигатели, конструктивно похожие на двигатели постоянного тока, которые также могут питаться переменным током, называемые универсальными двигателями.Различные различия могут быть сделаны на основе других ссылок: например, различие между синхронными двигателями, в которых частота сети равна кратной частоте вращения, и асинхронными, у которых две частоты различны; Следовательно, обычно электродвигатель классифицируется по категориям: асинхронный двигатель, синхронный двигатель или двигатель постоянного тока.
Двигатель постоянного тока с постоянной индукциейДвигатель постоянного тока — самый простой двигатель. Начну с внешней стороны, где корпус или кожух, который имеет систему крепления к скамейке или шасси, в котором имеется множество называется статором или индуктор, образованное опорной плитой, а магниты или электромагниты. Далее внутри находится ротор, который образован сердечником из пластин на оси, которая поддерживает все, окруженное серией обмоток, которые соединены с дельтами коллектора, где они получают электрический ток; все это поддерживается подшипниками на концах картера. На одной стороне вала находится шкив, зубчатый венец или муфта, которые передают используемую механическую энергию. Когда ток проходит через щетки к коллектору, электрический ток проходит через проводники катушки, что создает поперечную силу, и их сумма дает нам крутящий момент, который вращает узел ротора или двигатель. Через коллектор ток подается на соответствующие катушки, чтобы эта пара была как можно более сильной. Это двигатели в устройствах, приводимых в движение батареями или батареями. Двигатель постоянного тока с регулируемой индукциейДвигатель постоянного тока с регулируемой индукцией такой же, как двигатель с постоянной индукцией, но в этом случае поле создается катушками, которые работают как электромагнит и соединены с ротором последовательно или последовательно. параллельно. Этот двигатель также работает с однофазным переменным током. Самый распространенный пример — это двигатели обычных бытовых приборов. Асинхронный двигатель переменного токаВ статоре есть три группы обмоток, которые соответствуют трем фазам промышленного переменного тока, а ротор вместо коллектора несет три кольца, которые соединены с обмотками ротора, работает по тому же принципу, хотя из-за смещения фаз создается вращающееся поле, которое каким-то образом увлекает ротор. Частным случаем или очень часто используемой конструкцией является беличья клетка, поскольку это очень простой двигатель, в котором дельты и обмотки ротора заменены стержнями с кольцами на концах, соединяющих стержни, отсюда и их первое название. В асинхронных двигателях обмотки могут быть соединены двумя способами: в звезду, когда один конец катушек является общим, а другой соединен с каждой из фаз. Другой — в треугольнике, когда концы катушек соединены друг с другом и с фазой.Обмен двух фаз вызывает изменение направления вращения. Это наиболее часто используемый в отрасли двигатель с системой стартера звезда-треугольник. Синхронный электродвигатель переменного токаСинхронные электродвигатели названы так потому, что скорость вращения связана с частотой питающего тока, это связано с тем, что ротор питается постоянным током и увлекается вращающимся полем, которое производит катушки статора. Обычно они несут на одном валу двигателя динамо-машину, питающую ротор.Поскольку скорость изменяется в зависимости от частоты и позволяет фиксировать крутящий момент с минимальным потреблением, благодаря подключению к осциллятору его скорость можно очень легко изменять, поэтому он используется в тяговых системах (AVE — TGV). Шаговые двигателиОн питается постоянным током, а ротор содержит ряд постоянных магнитов, которые увлекаются катушками статора, которые управляются силовой электроникой, определяющей угол поворота, те, которые имеют пропорциональное управление , очень точны по углу поворота или положению.Эти двигатели часто используются в сервоприводах движения машин с числовым программным управлением или в двигателях чтения / записи жестких дисков компьютера. Линейный двигательПо сути, это асинхронный двигатель, который был разработан, поэтому вместо создания вращающейся пары он создает линейное смещение за счет смещения фаз. Могут ли электромобили самостоятельно заряжаться? —al говорит:Да, это возможно, и это возможно с 1894 года.не то, что обещания в Интернете много значат, но я искренне обещаю, что это можно сделать легко, и это было сделано много-много раз. Я лично знаю 4 разные простые технологии, которые могут выполнить эту задачу. Мне потребовался год, чтобы разобраться в этом, прежде чем я даже поверил в это. его удалили из учебников, и в школах говорят, что это невозможно. университетам говорят, что они могут и что не могут изучать, от людей, которые дают им гранты и деньги даже на то, чтобы заниматься своей наукой. Здесь достаточно сказано. второй закон термодинамики применим только к закрытым системам, построить открытую систему несложно. Например, все трансформаторы построены симметрично.гарантированно никогда не будет производить больше энергии, чем вложено, да мы это знаем, они нам это говорят … ну просто измените один, чтобы сделать его асимметричным, и запустить его на другой частоте, на его резонансной частоте, или добавьте конденсаторы во вторичные обмотки чтобы сбить резонансную частоту, легко перебрать. без изменения физической формы трансформатора и работы его на резонансной частоте можно получить коэффициент усиления примерно 3 к 1. около 300%. Погуглите асимметричные трансформеры, посмотрите на изображения и поверьте, что они настоящие, я видел это своими глазами.Так почему бы мне не сделать и не продать устройство overunity? поскольку это идет одним из четырех способов, вы не можете получить патент, и никто не будет инвестировать в продукт без него, они придут, выкупят вас и положат устройство на полку, как они сделали со всеми паровыми карбюраторами на 100 миль на галлон или если вы не Если не продаться, вы загадочным образом попадаете в аварию или заболеете какой-либо формой агрессивного рака и все равно уйдете через несколько месяцев. наконец, если ничего не помогает, незаметно приходит приказ национальной безопасности забрать все, что у вас есть, и угрозу жизни в тюрьме, если вы говорите об этом, без процедуры обжалования.4 способа потерять то или иное. Это просто реальность. Откройте свой разум и посмотрите за пределы того, что вам говорят думать. скоро этот пост будет удален, или я буду растерзан платными троллями, которые зарабатывают на жизнь рысканием по сети и не дают людям поверить в то, что они предполагают, так что этот пост не будет иметь значения, как только он будет найден lol. [email protected], чтобы вы не думали, что это какой-то анонимный пост без всяких заслуг. Это мое настоящее письмо, если у вас есть личные вопросы.Сохраняйте отрицательные комментарии при себе или я заболею, чтобы отправить вам вирус Управление направлением двигателя постоянного тока с использованием ArduinoПривет друзья! Я надеюсь, что вы все будете в полном порядке и весело проведете время. Сегодня я собираюсь поделиться с вами своими знаниями о том, как создать простую программу для управления направлением двигателя постоянного тока с использованием Arduino. Слово DC в основном является сокращением Постоянный ток . Таким образом, обычно используется двигатель постоянного тока с двумя входными клеммами, одна из которых является положительной, а другая — отрицательной.Если мы подключим эти клеммы к источнику напряжения, двигатель будет вращаться. Если вы измените полярность, двигатель будет вращаться в противоположном направлении. Вы также должны взглянуть на Различия между двигателями постоянного и переменного тока, чтобы получить лучшее представление об этих двигателях. Двигатель постоянного тока имеет множество применений. Вы можете использовать его в проектах автоматизации, для управления статическими и мобильными роботами, в транспортных системах, в насосах, вентиляторах, беседках, а также для промышленного использования. В этом руководстве я буду использовать DC Motor Direction Control , используя Arduino и контроллер двигателя L298.Кроме того, я также использовал ЖК-дисплей, который будет давать нам статус нашего двигателя постоянного тока, то есть движется ли он по часовой стрелке или против часовой стрелки. В моем последующем руководстве я буду управлять тем же двигателем постоянного тока с помощью NI LabVIEW 2015 и MATLAB. Я добавил следующий учебник по этому проекту, в котором я использовал управление направлением двигателя постоянного тока в MATLAB, поэтому в этом проекте я использовал то же оборудование, но вместо того, чтобы управлять им из Arduino, я управлял им с помощью MATLAB, поэтому у вас должен быть посмотрите этот учебник.Управление направлением двигателя постоянного тока с использованием ArduinoВ этом уроке я напишу простую программу для управления направлением двигателя постоянного тока с помощью Arduino. Arduino — это, по сути, потрясающий микроконтроллер, который очень прост в использовании, потому что это устройство с открытым исходным кодом. Итак, это устройство, удобное для студентов. Вы также можете писать программы для Arduino для разных целей. Arduino также является экономичным устройством по сравнению с другими микроконтроллерами, например. распберный пи, НИ-миРИО, галилео, одноплатный РИО и т. д.Прежде всего я подготовил полную настройку оборудования. Затем я сделал программу и связал ее с оборудованием. Мы подробно обсудим все шаги ниже. Логика довольно проста, то есть Arduino должен посылать команды контроллеру двигателя L298, а затем L298 определяет управление направлением двигателя постоянного тока, манипулируя командами Arduino. Прежде чем вдаваться в подробности, я хочу показать вам список необходимых компонентов. |