Схема и описание автомата включения-отключения зарядного устройства
Зарядное устройство для автомобильных аккумуляторов желательно дополнить автоматом, включающим его при понижении напряжения на аккумуляторе до минимума и отключающим после зарядки. Особенно это актуально при использовании батареи в качестве резервного питания или при долгосрочном хранении аккумулятора без работы — для предотвращения саморазряда.
Предлагаемая схема самодельного автомата включает аккумуляторную батарею на зарядку при понижении на ней напряжения до определенного уровня и отключает при достижении максимума.
Максимальным напряжением для кислотных автомобильных аккумуляторов является величина 14,2…14,5 В, а минимально допустимое при разряде — 10,8 В.
Схема автомата включения-отключения зарядного устройства состоит из компаратора на транзисторах VT1, VT2 и ключа на VT3, VT4.
Нажмите на рисунок для просмотра.
Работает устройство следующим образом. После подключения батареи и включения сети нажимают кнопку SB1 «Пуск». Транзисторы VT1 и VT2 закрываются, открывая ключ VT3, VT4, включающий реле К1. Оно своими нормально замкнутыми контактами К1.2 отключает реле К2, нормально замкнутые контакты которого (К2.1), замыкаясь, подключают зарядное устройство (ЗУ) к сети.Такая сложная схема коммутаций используется по двум причинам:
во-первых, обеспечивается развязка высоковольтной цепи от низковольтной;
во-вторых, чтобы реле К2 включалось при максимальном напряжении АБ и отключалось при минимальном, т.к. примененное реле РЭС22 (паспорт РФ 4500163) имеет напряжение включения 12. ..12,5 В.
..12,5 В.
Контакты К1.1 реле К1 переключаются в нижнее по схема положение. В процессе зарядки АБ напряжение на резисторах R1 и R2 возрастает, и при достижении на базе VT1 отпирающего напряжения, транзисторы VT1 и VT2 открываются, закрывая ключ VT3, VT4.
Реле К1 отключается, включая К2. Нормально замкнутые контакты К2.1 размыкаются и обесточивают зарядное устройство. Контакты К1.1 переходят в верхнее по схеме положение. Теперь напряжение на базе составного транзистора VT1, VT2 определяется падением напряжения на резисторах R1 и R2. По мере разряда АБ напряжение на базе VT1 снижается, и в какой-то момент VT1, VT2 закрываются, открывая ключ VT3, VT4. Снова начинается цикл зарядки. Конденсатор С1 служит для устранения помех от дребезга контактов К1.1 в момент переключения.
Регулировку устройства проводят без АБ и зарядного устройства. Необходим регулируемый источник постоянного напряжения с пределами регулировки 10…20 В. Его подключают к выводам схемы вместо GB1.
Движок резистора R1 переводят в верхнее положение, а движок R5 — в нижнее. Напряжение источника устанавливают равным минимальному напряжению батареи (11.5…12 В). Перемещением движка R5 добиваются включения реле К1 и светодиода VD7. Затем, поднимая напряжение источника до 14,2…14,5 В, перемещением движка R1 достигают отключения К1 и светодиода. Изменяя напряжение источника в обе стороны, убеждаются, что включение устройства происходит при напряжении 11,5…12 В, а отключение — при 14,2…14,5 В. На этом регулировка заканчивается.
В качестве R1 и R5 желательно применять многооборотные потенциометры типа СП5-3 или подобные.
Рекомендуем посмотреть:
Схема автоматического ЗУ для автомобильных аккумуляторов
Схема автоматического зарядного устройства на микросхемах
Автомат для отключения зарядного устройства. Схема
Зарядные устройства аккумуляторов автомобилей рекомендуется оснащать автоматом, подключающего его при снижении напряж. на аккумуляторе до минимального значения и выключающего по завершению заряда. В особенности это необходимо при применении аккумулятора в роли запасного источника питания или при продолжительном хранении батареи без эксплуатирования — для предупреждения саморазряда.
на аккумуляторе до минимального значения и выключающего по завершению заряда. В особенности это необходимо при применении аккумулятора в роли запасного источника питания или при продолжительном хранении батареи без эксплуатирования — для предупреждения саморазряда.
Блок питания 0…30 В / 3A
Набор для сборки регулируемого блока питания…
Описание работы автомата для отключения зарядного устройства
Описываемая электрическая автомата для отключения зарядного устройства вкл аккумулятор на зарядку при снижении на нем напряж. до заданного уровня и выключает при достижении максимума. Предельным напряжением для кислотных аккумуляторов автомобиля служит напряжение 14,2-14,5 вольт, а минимальным разрешенным при разряде — 10,8 вольт. Минимальное рекомендуется лимитировать для пущей надежности напряжением 11,5…12 вольт.
Приведенная электрическая схема содержит компаратор на транзисторах VT1, VT2 и ключ на VT3, VT4. Функционирует электрическая схема следующим образом.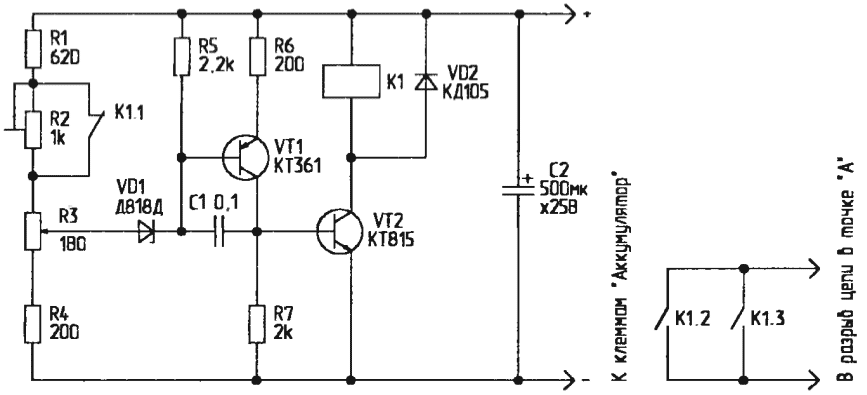
Реле своими нормально замкнутыми выводами К1.2 выключает электрореле К2, нормально замкнутые выводы которого (К2.1), подсоединяют зарядное устройство (ЗУ) к сети. Такая сложная электрическая схема подключений применяется по 2-м причинам:
- во-первых, создается гальваническая развязка высоковольтной электроцепи от низковольтной;
- во-вторых, для того чтобы электрореле К2 активировалось при максимальном напряж. аккумулятора и отключалось при минимальном, т.к. используемое электрореле РЭС22 (паспорт РФ 4500163) имеет рабочее напряжение равное 12…12,5 В.
Контакты К1.1 электрореле К1 переводятся в нижнее по схеме положение. В течении заряда аккумулятора потенциал на сопротивлениях R1 и R2 увеличивается, и при достижении на базе VT1 открывающего напряжения, транзисторы VT1 и VT2 отпираются, запирая ключ VT3, VT4.
Реле К1 выключается, включая К2. Нормально замкнутые выводы К2.1 размыкаются и отключают зарядное устройство. Выводы К1.1 переключаются в верхнее по схеме положение. Сейчас потенциал на базе составного транзистора VT1, VT2 обусловливается падением напряж. на сопротивлениях R1 и R2. В ходе разряда АБ потенциал на базе VT1 уменьшается, и в определенный момент VT1, VT2 закрываются, открывая ключ VT3, VT4. Вновь осуществляется цикл заряда. Емкость С1 предназначена для ликвидации помех от дребезга контактов К1.1 в время переключения.
Настройка автомата для отключения зарядного устройства
Настройку прибора делают без аккумулятора и зарядного устройства. Нужен регулируемый блок питания с пределами регулировки 10…20 В. Его подсоединяют к контактам электрической схемы взамен GB1. Движок сопротивления R1 переводят в верхнее положение, а движок R5 — в нижнее. Напряжение источника делают равным мин напряжению аккумулятора (11.5…12 В).
Двигая движок R5 добиваются включения электрореле К1 и светодиода VD7. Потом, увеличивая напряжение блока питания до 14,2…14,5 вольт, перемещением движка потенциометра R1 добиваются выключения К1 и светодиода. Меняя напряжение блока питания в обе стороны, убеждаются, что подключение автомата совершается при напряж. 11,5…12 В, а выключение — при 14,2…14,5 В. На этом настройка заканчивается. В роли R1 и R5 рекомендуется применять многооборотные переменные резисторы марки СП5-3 или похожие.
Потом, увеличивая напряжение блока питания до 14,2…14,5 вольт, перемещением движка потенциометра R1 добиваются выключения К1 и светодиода. Меняя напряжение блока питания в обе стороны, убеждаются, что подключение автомата совершается при напряж. 11,5…12 В, а выключение — при 14,2…14,5 В. На этом настройка заканчивается. В роли R1 и R5 рекомендуется применять многооборотные переменные резисторы марки СП5-3 или похожие.
К.Селюгин, г.Новороссийск
Цифровой мультиметр AN8009
Большой ЖК-дисплей с подсветкой, 9999 отсчетов, измерение TrueRMS…
Автоотключение любого ЗУ автомобиля при завершении зарядки, схема
Всем привет, сегодня рассмотрим несколько универсальных схем, которые позволят отключить зарядное устройство при полной зарядке аккумулятора, иными словами внедрением этих схем можно построить автоматическое зарядное устройство или доработать функцию автоотключения промышленной зарядки.
Сразу хочу пояснить один момент, если зарядное устройство работает по принципу стабильный ток — стабильное напряжение, то нет смысла использовать функцию автоотключения, поскольку естественным образом по мере заряда батареи ток в цепи будет падать и в конце заряда он равен нулю. Схемы, которые мы сегодня рассмотрим, предназначены для работы с автомобильными свинцово — кислотными аккумуляторами, хотя они могут работать с любыми зарядными устройствами, без всякой переделки последних.
Схемы, которые мы сегодня рассмотрим, предназначены для работы с автомобильными свинцово — кислотными аккумуляторами, хотя они могут работать с любыми зарядными устройствами, без всякой переделки последних.
Начнём с простых схем…
Первый вариант построен всего на одном транзисторе, переключающим элементом в схеме является реле с напряжением катушки 12 вольт.
Использованы те контакты, которые замкнуты без подачи питания на реле
Резистивный делитель или переменный резистор, задает нужное напряжение, смещение на базе транзистора, тот срабатывая подаёт питание на обмотку реле, вследствие чего реле включается размыкая контакт, который в состоянии покоя был замкнут и через который протекал ток заряда.Используя подстроечный резистор мы можем выставить то напряжение при котором сработает транзистор.
Для настройки схемы удобно использовать регулируемый источник питания, на котором нужно выставить напряжение около 13.5-13.7 вольт, что равноценно напряжению полностью заряженного автомобильного аккумулятора.
Затем медленно вращая подстроечный резистор добиваемся срабатывания транзистора, а следовательно и реле при выставленном напряжении.Теперь проверяем схему еще раз, допустим в начале заряда напряжение на аккумуляторе 12 вольт, по мере заряда оно увеличивается и по достижению порога 13.5 вольт реле срабатывает, отключив зарядное устройство от сети.
Кстати, можно подключить реле следующим образом, в этом случае зарядка не отключается от сети, а просто пропадает выходное напряжение и процесс заряда прекратиться, в этом случае контакты реле должны быть рассчитаны на токи в полтора раза больше максимального выходного тока зарядного устройства.
Транзистор буквально любой обратной проводимости, советую взять транзисторы средней мощности наподобие BD139, диоды в эмиттерной цепи транзистора тоже особо не критичны, ток потребления схемы всего 10-20 миллиампер, но схема имеет несколько недостатков.
Например, низкая помехоустойчивость, из-за которых возможно ложное срабатывание реле и невысокая точность работы, из-за отсутствия источника опорного напряжения и прочих стабилизирующих узлов.
Добавив в базовую цепь ключа стабилитрон, мы решим указанные проблемы и появится возможность довольно точно выставить нужное напряжение срабатывания.
Для настройки советую использовать многооборотный подстроечный резистор. Диод VD1 защищает транзистор от самоиндукции в случае размыкания реле.
Настраиваем схему точно так, как в первом варианте, лампочка имитирует процесс заряда и подключена вместо аккумулятора, при превышении определенного порога, реле срабатывает и лампа потухает.
Вторая схема построена на базе любого таймера NE555, этот вариант похож на предыдущие, микросхема NE555 в своей конструкции содержит два компаратора, пониженное опорное напряжение формирует стабилитрон, порог срабатывания устанавливается подстроечным резистором, как только напряжение на батарее будет равна пороговому, на выходе таймера получим высокий уровень, вследствие чего сработает транзистор.
В этом варианте использовать те контакты реле, которые находятся в разомкнутом состоянии без подачи питания. Во время настройки точку «А» размыкают от выходного контакта и подключают к плюсу зарядного устройства. К выходному контакту реле подключают лампу, второй вывод лампы подключают к массе питания.
Во время настройки точку «А» размыкают от выходного контакта и подключают к плюсу зарядного устройства. К выходному контакту реле подключают лампу, второй вывод лампы подключают к массе питания.
В обеих схемах порог срабатывания можно выставить в пределах от 13.5 до 14 вольт, напряжение полностью заряженного автомобильного аккумулятора составляет от 12.6 до 12.8 вольт но при заведенном двигателе напряжение доходит до 14.5 вольт, так что небольшой перезаряд аккумулятора никак не повредит.
Аналогичную схему можно собрать на базе компаратора или операционного усилителя в компараторном включении, принцип работы тот же, что и в случае внедрения таймера NE555. В этой же статье, приведены наиболее простые и доступные варианты.
Все печатки в формате .lay можно скачать для повторения.
Автор; Ака Касьян
до 10 А, своими руками, ЗУ для АКБ из трансформатора
Автор Акум Эксперт На чтение 12 мин Просмотров 15.8к. Опубликовано
Практически каждый автолюбитель рано или поздно сталкивается с необходимостью подзарядки аккумуляторной батареи стационарным зарядным устройством (СЗУ). Причин тут множество – частые пуски, короткие поездки, длительные стоянки. Но для того чтобы батарея служила долго, она должна не только быть постоянно заряженной, но и правильно заряжаться. В этой статье мы рассмотрим несколько схем регуляторов зарядного тока. Ведь этот узел – неотъемлемая часть любого «правильного» СЗУ.
Простые зарядные устройства с ручной регулировкой
Начнем с простых устройств, позволяющих вручную регулировать параметры зарядки. Поскольку большинство аккумуляторных батарей легковых автомобилей имеет емкость не более 100-120 Ач, зарядного устройства, обеспечивающего ток до 10 ампер, будет вполне достаточно.
Простой регулятор с балластными конденсаторами
Сделать такое зарядное устройство, не имеющее дефицитных деталей, сможет каждый, умеющий пользоваться мультиметром и держать в руках паяльник. Взглянем на схему, приведенную ниже.
Взглянем на схему, приведенную ниже.
Схема простого зарядного устройства с балластными конденсаторами
Устройство состоит из понижающего трансформатора Tr1, мощного выпрямителя, собранного на диодах VD1-VD4 и набора конденсаторов разной емкости С1-С4. Каждый из конденсаторов может включаться в цепь питания трансформатора при помощи отдельного выключателя S2-S4. Емкости конденсаторов подобраны так, что каждый последующий обеспечивает выходной ток ЗУ вдвое больший, чем предыдущий.
В зависимости от номинала и количества подключенных конденсаторов будет изменяться выходное напряжение, а значит, и зарядный ток. Комбинируя конденсаторы выключателями S2-S4, можно изменять зарядный ток от 1 до 15 А с шагом 1 А, что более чем достаточно для зарядки любой АКБ.
Напряжение на клеммах аккумуляторной батареи, подключенной к клеммам XS2, XS3, можно контролировать при помощи вольтметра PU1. Величину зарядного тока покажет амперметр PA1. Выключателем питания служит тумблер S1.
В конструкции можно использовать любой сетевой трансформатор (можно самодельный), обеспечивающий ток не менее 10 А при выходном напряжении 22-24 В. Диоды Д305 можно заменить на любые выпрямительные, рассчитанные на прямой ток не менее 10 А и выдерживающие обратное напряжение не ниже 40 В. Диоды выпрямительного моста необходимо установить на изолированные друг от друга радиаторы с площадью рассеяния не менее 100 см2 каждый.
Важно! Если полупроводники будут устанавливаться на один общий радиатор, то это нужно делать через изолирующие слюдяные прокладки. При этом рассеиваемая площадь радиатора выбирается не менее 300 см2 .
Конденсаторы C2-C4 – неполярные, бумажные, рассчитанные на рабочее напряжение не ниже 300 В. Подойдут, к примеру, МБГЧ, МБГО, КБГ-МН, МБМ, МБГП, которые широко использовались в качестве фазосдвигающих для асинхронных двигателей бытовой техники. На месте PU1 может работать любой вольтметр постоянного тока с пределом измерения 30 В. PA1 – амперметр с пределом измерения 20-30 А, в качестве которого удобно использовать любой микроамперметр с соответствующим шунтом.
PA1 – амперметр с пределом измерения 20-30 А, в качестве которого удобно использовать любой микроамперметр с соответствующим шунтом.
С плавной регулировкой тока зарядки
Следующая схема сложнее, где в качестве регулирующего элемента использует тиристор. Преимущество данной конструкции – плавная регулировка выходного напряжения, а значит, и зарядного тока. Диапазон регулировки – 0-10 А. Принцип работы СЗУ – фазоимпульсное управление ключом (тиристором).
Схема импульсного зарядного устройстваПрибор состоит из силового трансформатора T1, выпрямительного моста, собранного на мощных диодах VD1-VD4, и схемы регулировки тока, собранной на транзисторах VT1, VT2 и тиристоре VS1. Переменное напряжение величиной 18-22 В поступает со вторичной обмотки силового трансформатора на выпрямительный мост. Выпрямленное, оно подается на схему регулировки. В начале полуволны начинает заряжать конденсатор С2. Скорость его зарядки можно плавно регулировать переменным резистором R1.
Как только конденсатор зарядится до определенной величины, откроется аналог однопереходного транзистора, собранный на элементах VT1, VT2. Конденсатор быстро разрядится через управляющий электрод тиристора, последний откроется и будет находиться в таком состоянии до окончания этой полуволны. При появлении следующей процесс повторится.
Конденсатор быстро разрядится через управляющий электрод тиристора, последний откроется и будет находиться в таком состоянии до окончания этой полуволны. При появлении следующей процесс повторится.
Мнение эксперта
Алексей Бартош
Специалист по ремонту, обслуживанию электрооборудования и промышленной электроники.
Задать вопросТаким образом, при каждой полуволне тиристор будет открываться с той или иной задержкой (зависит от времени заряда конденсатора С2), отсекая передний ее фронт. Чем большая часть полуволны будет отсечена, тем меньшее действующее напряжение будет приложено к клеммам аккумулятора, а значит, и зарядный ток будет ниже.
В качестве силового подойдет любой сетевой трансформатор с напряжением на вторичной обмотке 18-22 В при токе не менее 10 А. На месте VT1, кроме указанного, могут работать КТ361Б-КТ361Е, КТ502Г, КТ502В, КТ3107А, КТ501Ж-KT501K. Вместо КТ315А подойдут КТ315Б-Д, КТ3102А, КТ312Б, КТ503В-Г, П307. В качестве С2 могут использоваться конденсаторы типа МБГП, К73-17, К42У-2, К73-16, К73-11 емкостью 0. 47-1 мкФ. Вместо КД105Б подойдут КД105В, КД105Г или Д226 с любой буквой. Переменный резистор R1 типа СПО-1, СП-1, СПЗ-30а.
47-1 мкФ. Вместо КД105Б подойдут КД105В, КД105Г или Д226 с любой буквой. Переменный резистор R1 типа СПО-1, СП-1, СПЗ-30а.
Амперметр PA1 – любой с током полного отклонения 10 А. Вместо мощных выпрямительных диодов Д245 подойдут любые из серий КД213, КД203, Д245, КД210, Д242, Д243, выдерживающие ток не менее 10 А и обратное напряжение на ниже 50 В. Их необходимо установить на радиаторы площадью не менее 100 см2. Тиристор КУ202В можно заменить на КУ202Г-Е и даже на Т-160 или Т-250. Он тоже устанавливается на радиатор.
Полезно! Если выходное напряжение трансформатора несколько выше 22 В (скажем, 24-28 В), то можно использовать и его. Единственное, при этом необходимо номинал резистора R5 увеличить до 200 Ом.
С зарядкой ассиметричным током
Это зарядное устройство имеет предел регулировки тока от 0 до 10 А и производит зарядку ассиметричным током, при котором определенное время батарея заряжается, а остальную часть – разряжается током около 600 мА. Это существенно продлевает жизнь АКБ и предотвращает сульфатацию.
Это существенно продлевает жизнь АКБ и предотвращает сульфатацию.
Здесь регулировка зарядного тока производится по высокому переменному напряжению при помощи симметричного тиристора (симистора). Принцип регулировки тот же, что и в предыдущей схеме, – фазоимпульсное управление. Но схема регулятора выглядит и работает несколько иначе.
В начале положительной полуволны зарядка конденсатора С2 происходит через резистор R3 и диод VD1 диодного моста VD1-VD4. Как только конденсатор зарядится до напряжения зажигания газоразрядной лампы HL1 (время зарядки зависит от положения движка переменного резистора R1), последняя зажжется. Конденсатор быстро разрядится через управляющий электрод симистора, и он откроется, подавая напряжение на сетевую обмотку понижающего трансформатора Т1.
В таком состоянии симистор будет находиться до окончания полупериода. При отрицательной полуволне конденсатор будет заряжаться через резистор R5 и диод VD2. При этом полярность напряжения будет противоположной предыдущей. Снова разряд в лампе, тиристор открывается, пропуская на обмотку уже отрицательную полуволну.
Снова разряд в лампе, тиристор открывается, пропуская на обмотку уже отрицательную полуволну.
Мнение эксперта
Алексей Бартош
Специалист по ремонту, обслуживанию электрооборудования и промышленной электроники.
Задать вопросЛюбопытно! Резисторы R3 и R5 исполняют еще одну немаловажную роль. Они попеременно через диоды VD3 и VD4 шунтируют сетевую обмотку трансформатора. Это предотвращает закрывание симистора сразу после короткого открывающего импульса на время, пока ток в обмотке Т1, являющейся индуктивной нагрузкой, не установится выше тока удержания симмитричного тиристора.
Пониженное напряжение, величина которого зависит от положения движка R1, выпрямляется диодами VD5, VD6 и подается на клеммы аккумуляторной батареи, производя ее зарядку выбранным нами током. После закрытия симистора и до следующего его открытия батарея разряжается через нагрузочный резистор R6, обеспечивающий разрядный ток порядка 600 мА.
Зарядный ток можно контролировать при помощи амперметра PA1, прибор PV1 показывает напряжение на клеммах АКБ.
Важно! Устанавливая величину зарядного тока по амперметру, необходимо учитывать и ток (600 мА), протекающий через резистор R6. То есть, если мы установим на приборе 6 А, фактический зарядный ток, протекающий через АКБ, будет составлять 6 – 0.6 = 5.4 А.
О деталях. В качестве сетевого подойдет любой трансформатор соответствующей мощности (выдаваемый ток не менее 10 А) с выходным напряжением 20 В и отводом от середины. Если вторичная обмотка не имеет отвода от середины, то можно использовать выпрямитель, собранный по мостовой схеме. Диоды VD5, VD6 – любые мощные выпрямительные на ток не менее 10 А и обратное напряжение не ниже 40 В.
VD1-VD4 можно заменить на любые выпрямительные, выдерживающие ток не менее 200 мА и напряжение 300 В. Конденсаторы С1, С2 – пленочные или бумажные, неполярные. Симистор можно заменить на КУ208В. Амперметр PA1 имеет предел измерения 15-20 А, вольтметр PV1 – 20 В. Мощные выпрямительные диоды VD5, VD6 и симистор VS1 необходимо установить на радиаторы. При этом диоды можно установить на общий радиатор без изолирующих прокладок. Диоды VD1-VD4 в радиаторе не нуждаются.
При этом диоды можно установить на общий радиатор без изолирующих прокладок. Диоды VD1-VD4 в радиаторе не нуждаются.
Схемы регуляторов тока на микросхемах
Выше мы рассмотрели несколько схем зарядных устройств с ручной регулировкой. Основной их недостаток – отсутствие стабилизации. В процессе зарядки АКБ ток через нее уменьшается, а это значит, что придется постоянно контролировать и подстраивать этот параметр. Но построить стабилизированный источник питания ненамного сложнее. Для начала несколько схем регулятора тока для зарядного устройства со стабилизацией, которые можно использовать для построения стационарных ЗУ.
Стабилизатор
Эта схема позволяет заряжать шести- и двенадцативольтовые батареи током одной, заранее установленной стабильной величины до 10 ампер.
Стабилизатор тока для зарядного устройства
Сердцем узла является интегральный стабилизатор напряжения, включенный по схеме токовой стабилизации. Величина зарядного тока будет зависеть от номинала резистора R4, который можно рассчитать по формуле:
I = 1. 2/R,
2/R,
где:
- I – необходимый зарядный ток в А;
- R – номинал резистора R4 в Ом.
Поскольку сама по себе микросхема КР142ЕН12А маломощная, для обеспечения большей мощности используются транзисторные ключи T1 и T2, включенные параллельно. Резисторы R1 и R2 – токовыравнивающие. Они компенсируют разброс параметров транзисторов.
Несмотря на токовыравнивающие резисторы желательно подбирать транзисторы с как можно более близкими коэффициентами передачи.
Резисторы R1, R2, R4 изготавливаются из отрезков обмоточного провода необходимой длины, которые для большей компактности свернуты в спираль. Транзисторы VT1 и VT2 можно установить на один общий радиатор без изолирующих прокладок. Площадь рассеяния радиатора – 300 см2. Если на место R4 установить мощный реостат сопротивлением 0.8 Ом, то легко получить регулируемый стабилизатор.
Регулятор-стабилизатор
Эта схема является регулируемым стабилизатором и в отличие от предыдущей имеет более высокий КПД, поскольку рассеиваемая мощность на токозадающем резисторе намного меньше из-за его низкого сопротивления.
Узел собран на операционном усилителе LM358 и полевом транзисторе IRFZ44. Регулировка зарядного тока производится при помощи переменного резистора R3. Резистор R5 является токозадающим.
При указанных на схеме номиналах R5 регулировка будет производиться в диапазоне 0 … 8 А. Если необходимы большие величины, то номинал резистора нужно уменьшить.
На месте T1 может работать транзистор STP55NF06, стабилитрон 1N4734A заменим на любой маломощный с напряжением стабилизации 5.6 В. Отечественные аналоги микросхемы LM358 – КР1401УД5, КР1053УД2, КР1040УД1. Полевой транзистор устанавливаем на радиатор.
Регулятор тока и напряжения
И напоследок рассмотрим схему, которая будет полезна для конструирования зарядного устройства с регулировкой напряжения и тока. Подойдет она и в качестве лабораторного источника питания. Устройство обеспечивает плавную регулировку напряжения в диапазоне 2.4-28 вольт и регулировку ограничения тока от 0 до 15 ампер. По сути, это готовое зарядное устройство-автомат, достаточно добавить к схеме силовой трансформатор с выходным напряжением 18-22 В и способный обеспечить ток до 15 А.
По сути, это готовое зарядное устройство-автомат, достаточно добавить к схеме силовой трансформатор с выходным напряжением 18-22 В и способный обеспечить ток до 15 А.
Регулятор напряжения собран на транзисторах Т1 Т2 и регулируемом стабилитроне D1 по схеме обычного параметрического стабилизатора. Величина выходного стабилизированного напряжения регулируется при помощи переменного резистора P1. Стабилизатор-регулятор тока выполнен на интегральном стабилизаторе напряжения DD1 и мощном полевом транзисторе T3. Регулировка осуществляется при помощи переменного резистора P2. Схемы обоих узлов классические и особых пояснений не требуют.
Единственное, скажем пару слов о назначении светодиодов Led1 и Led2. Они служат для индикации правильного подключения СЗУ к аккумуляторной батарее. Если полярность верная, то загорится индикатор Led1: можно подключать зарядное устройство к сети и начинать зарядку. Если полярность перепутана, то загорится Led2. Пока прибор не включен в сеть, ему ничего не грозит.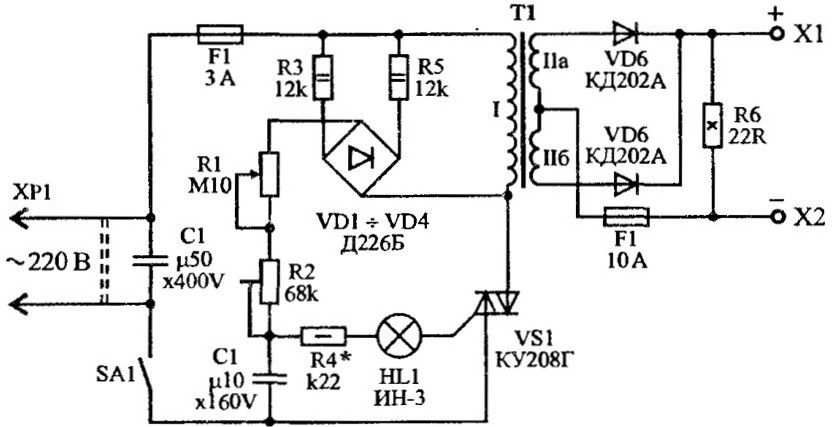 Просто меняем полярность на правильную.
Просто меняем полярность на правильную.
Полезно! Зарядка батареи производится следующим образом. Резистором P1 устанавливаем конечное напряжение зарядки (14.5 В), резистором P2 – начальный ток заряда (0.1 от емкости батареи). В процессе зарядки АКБ напряжение на ее клеммах будет увеличиваться, и как только оно достигнет установленного нами значения, ток зарядки упадет до 100-200 мА, процесс закончен.
В устройстве вместо моста KBPC2510 можно использовать любые мощные выпрямительные диоды (VD1-VD4), выдерживающие ток не менее 15 А и обратное напряжение 50 В. Транзистор TIP35C можно заменить на КТ867А, TIP41С – на КТ805 или КТ819. Диоды и транзисторы нужно установить на радиаторы площадью не менее 100 см2 каждый. Если используется мост, то он тоже должен иметь радиатор. Аналоги управляемого стабилитрона TL431 – КР142ЕН19А, К1156ЕР5Т, KA431AZ, LM431BCM, HA17431VP, IR9431N.
Интегральный стабилизатор напряжения L7812CV заменим на LM7812CT, UA7812CKC KA7812A, MC7812CT, КР142ЕН8Б.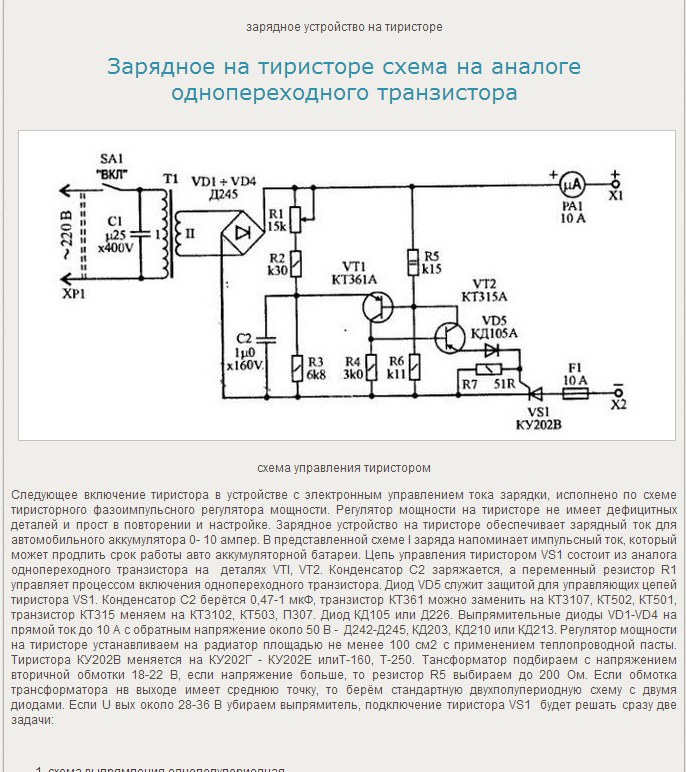 Полевой транзистор IRFP250 можно заменить на IRFP260. Ему тоже нужен радиатор. Светодиоды – любые индикаторные, желательно разного цвета свечения.
Полевой транзистор IRFP250 можно заменить на IRFP260. Ему тоже нужен радиатор. Светодиоды – любые индикаторные, желательно разного цвета свечения.
Подведем итоги
Итак, мы выяснили, что схем, позволяющих регулировать параметры зарядки аккумуляторной батареи, немало. Сложные и простые, с широким функционалом и просто стабилизаторы – выбирать есть из чего. Ну а тем, кого не удовлетворила, надо признать, довольно скромная подборка конструкций, можно рекомендовать статью «» и несколько роликов по теме.
Простое зарядное устройство
Зарядное устройство из готовых узлов
 youtube.com/embed/CI-m9I-HJ9Y?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/CI-m9I-HJ9Y?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>Зарядное устройство с автоматическим отключением
Автоматический выключатель зарядного устройства АКБ » S-Led.Ru
При зарядке автомобильных аккумуляторов нужно придерживаться определенных требований, заявленных производителем. Нормой зарядки для автомобильного аккумулятора является заряд током в 0,1 от номинальной емкости в течение 10 часов. Например, батарею 6-СТ55 нужно заряжать током 5,5А в течение 10 часов. Иногда применяют другие режимы зарядки, с большим или меньшим током, соответственно, больше или меньше времени составляет период зарядки.
Несмотря на наличие в продаже всевозможных электронных импульсных автоматических зарядных устройств, большинство автомобилистов предпочитают пользоваться обычными зарядными устройствами, представляющими собой трансформатор с мощным диодным выпрямителем, амперметром, вольтметром и регулятором тока.

Здесь приводится описание несложного таймера, который может ограничивать работу зарядного устройства периодами 2, 4, 6, 8, 10, 12. 14, 16 или 18 часов. Точность установки времени не высокая, и обычно в пределах погрешности 10%, но для зарядки аккумулятора это вполне допустимо. Таймер питается непосредственно от заряжаемой батареи, на его выходе есть реле, которое включает в сеть зарядное устройство в момент подключения таймера к аккумулятору, и выключает его по завершении необходимого времени. Время устанавливается переключателем на 9 положений.
Таймер состоит из RC-мультивибратора, генерирующего импульсы частотой 2,27 Гц и двух счетчиков. Первый счетчик D2 дает деление на 16384, что при входной частоте 2,27 Гц дает период 2 часа. Эти импульсы далее поступают на десятичный счетчик D3, который считает данные периоды и переключателем S1 позволяет выбрать один из девяти периодов с шагом в 2 часа.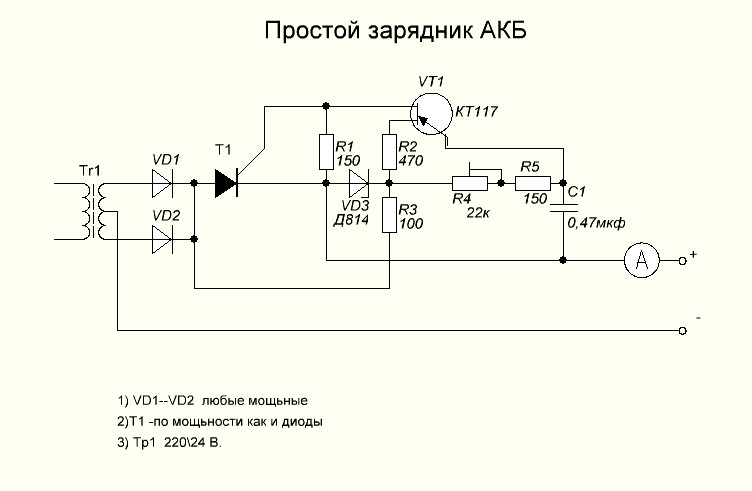
Схема питается от заряжаемого аккумулятора, и включение происходит в момент подключения схемы к нему. Нужно заранее установить S1 в необходимое положение, затем подключить к аккумулятору (параллельно выходу зарядного устройства). В момент включения цепь C2-R5 сбросит оба счетчика в нуль. На всех выходах D3, которые соединены с S1 будут нули, а на выходе инвертора D1.3, — единица. Эта единица откроет ключ VT2-VT3, и реле К1 подключит к электросети зарядное устройство.
После этого начнется отсчет времени Спустя заданное время единица появится на том выходе D3, на который переключен S2.
Автомат Отключения ЗУ для АКБ Автомобиля | PRACTICAL ELECTRONICS
Приветствую всех читателей канала! В этой статье рассмотрим схему и конструкцию приставки, которая пригодится для работы с зарядными устройствами АКБ автомобиля, не имеющими функции автоматического отключения по завершении процесса заряда. Эта приставка-автомат работает практически с любыми зарядными устройствами как заводского, так и самодельного изготовления.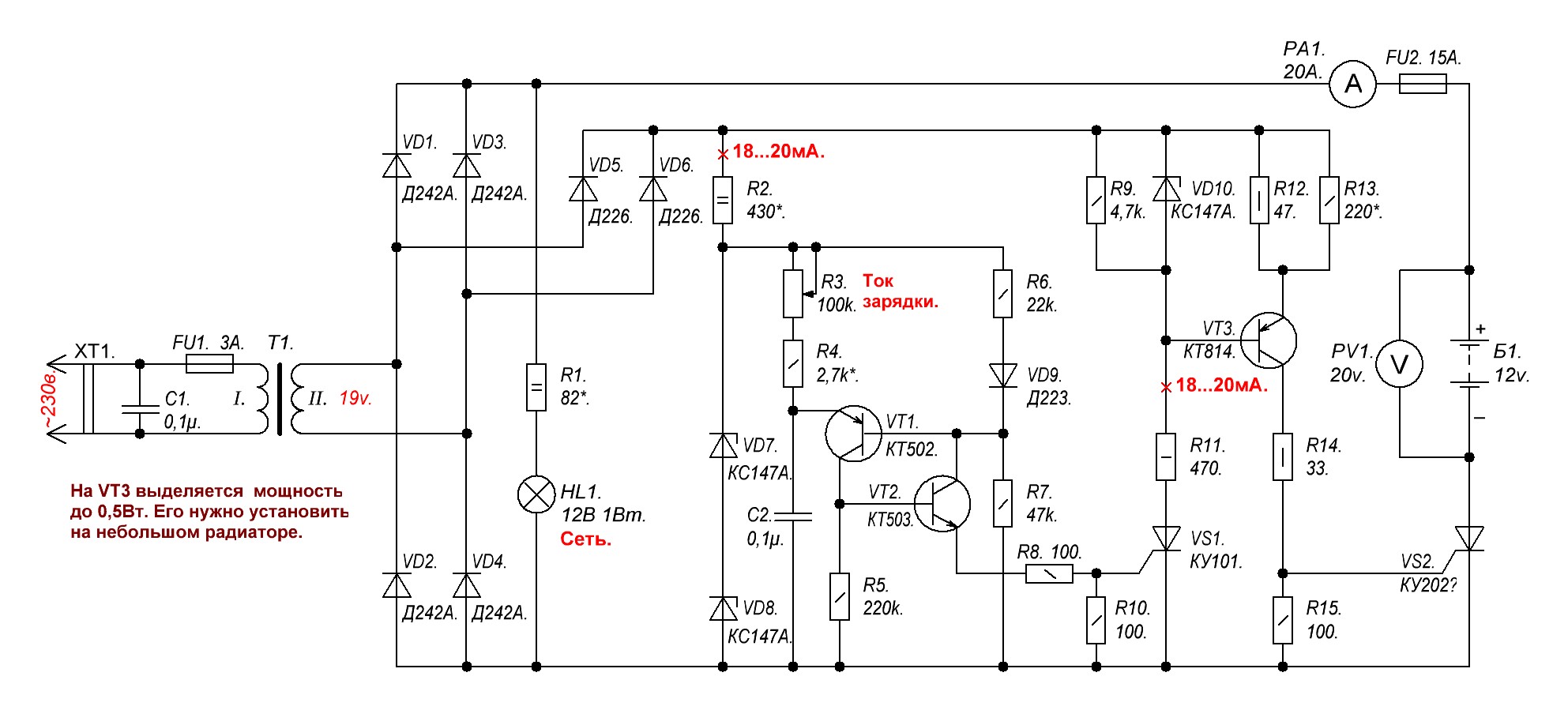
Думаю, что актуальность автоматического завершения заряда не у кого не вызывает сомнения. Ведь как часто можно найти схему ЗУ подходящую для повторения, устраивающую по параметрам, но… нет автоматического завершения…
Через данную схему на ЗУ подаётся сетевое напряжение, а по завершению процесса зарядки, автомат отключит ЗУ от сети. Схема содержит компаратор на один из входов которого подано напряжение, пропорционально увеличивающееся при увеличении зарядного напряжения на батарее (и уменьшающееся при уменьшении) и одновременно пропорционально уменьшающееся при увеличении (увеличивающееся при уменьшении) зарядного тока. На второй вход подано то же самое напряжение, что и на первый, но со значительной задержкой во времени. Иначе говоря, пока будет увеличиваться напряжение на батарее и (или) уменьшаться ток зарядки значение напряжения на втором входе компаратора будет меньше значения напряжения на первом и эта разность пропорциональна скорости изменения зарядного напряжения и тока.
Когда напряжение на батарее и ток зарядки стабилизируются (что будет свидетельствовать о полной заряженности батареи) значения напряжения на входах компаратора сравняются, он переключится и даст сигнал на отключение зарядного устройства.
Принцип работы схемы
Схема электрическая принципиальная автомата отключения ЗУСхема электрическая принципиальная автомата отключения ЗУ
Схема состоит из входного ОУ DA1, двух компараторов напряжения на ОУ DA2.1, DA2.2, двувходового электронного реле VT1-VT3, К1 и блока питания, состоящего из сетевого трансформатора Т1, диодного моста VD3, конденсатора С6 и параметрического стабилизатора напряжения VD2R23. Плюсовой выход зарядного устройства подключают к разъёму «+ЗУ», плюсовой вывод заряжаемой батареи к «+АКБ», а минусовые выводы ЗУ и АКБ объединены в общий провод – разъём «GND».
При нажатии на кнопку SB1 напряжение сети поступает к ЗУ и на первичную обмотку трансформатора Т1. Нестабилизированным напряжением с диодного моста VD3 питается электронное реле, а стабилизированным — ОУ DA2 (DA1 питается от зарядного устройства). Начинается зарядка АКБ.
Нестабилизированным напряжением с диодного моста VD3 питается электронное реле, а стабилизированным — ОУ DA2 (DA1 питается от зарядного устройства). Начинается зарядка АКБ.
Падение напряжения, создаваемое током зарядки на резисторах R1R6 поступает на вход ОУ DA1 включенного по схеме инвертирующего усилителя. Напряжение на его выходе при уменьшении тока зарядки будет увеличиваться. С другой стороны, выходное напряжение ОУ пропорционально его напряжению питания. А поскольку усилитель питается непосредственно с заряжаемой батареи, то выходное напряжение ОУ будет функцией как напряжения на зажимах заряжаемой батареи, так и тока зарядки.
К выходу ОУ подключен ФНЧ R2C1 с которого напряжение через интегрирующие цепи R8C4 и R3R4R5C3 поступает на входы компаратора, выполненного на ОУ DA2.2. Цепь R5C3 имеет постоянную времени во много раз большую, чем цепь R8C4, поэтому напряжение на не инвертирующем входе этого компаратора будет меньше чем на инвертирующем и на выходе установится низкий уровень.
Компаратор на ОУ DA2.1 представляет собой обычное пороговое устройство на инвертирующий вход которого подано образцовое напряжение с резистивного делителя R13R17, а на не инвертирующий — с делителя R14R15R16, подключенного к АКБ. Компаратор переключается при достижении на батарее напряжения 14,4 В и служит для исключения возможности преждевременного отключения зарядного устройства в условиях незначительной динамики изменения напряжения на батарее.
В результате, пока напряжение на АКБ не достигнет указанного значения, приставка не отключит ЗУ, даже если переключился компаратор DA2.2. Такая ситуация возможна при установке заниженного значения зарядного тока и, как следствие, при очень медленном изменении зарядных напряжения и тока. Первоначально на выходе компаратора DA2.1 также действует напряжение низкого уровня.
Выходы обоих компараторов через резистивные делители R18R19 и R20R21 соединены с базами транзисторов VT2 и VT1.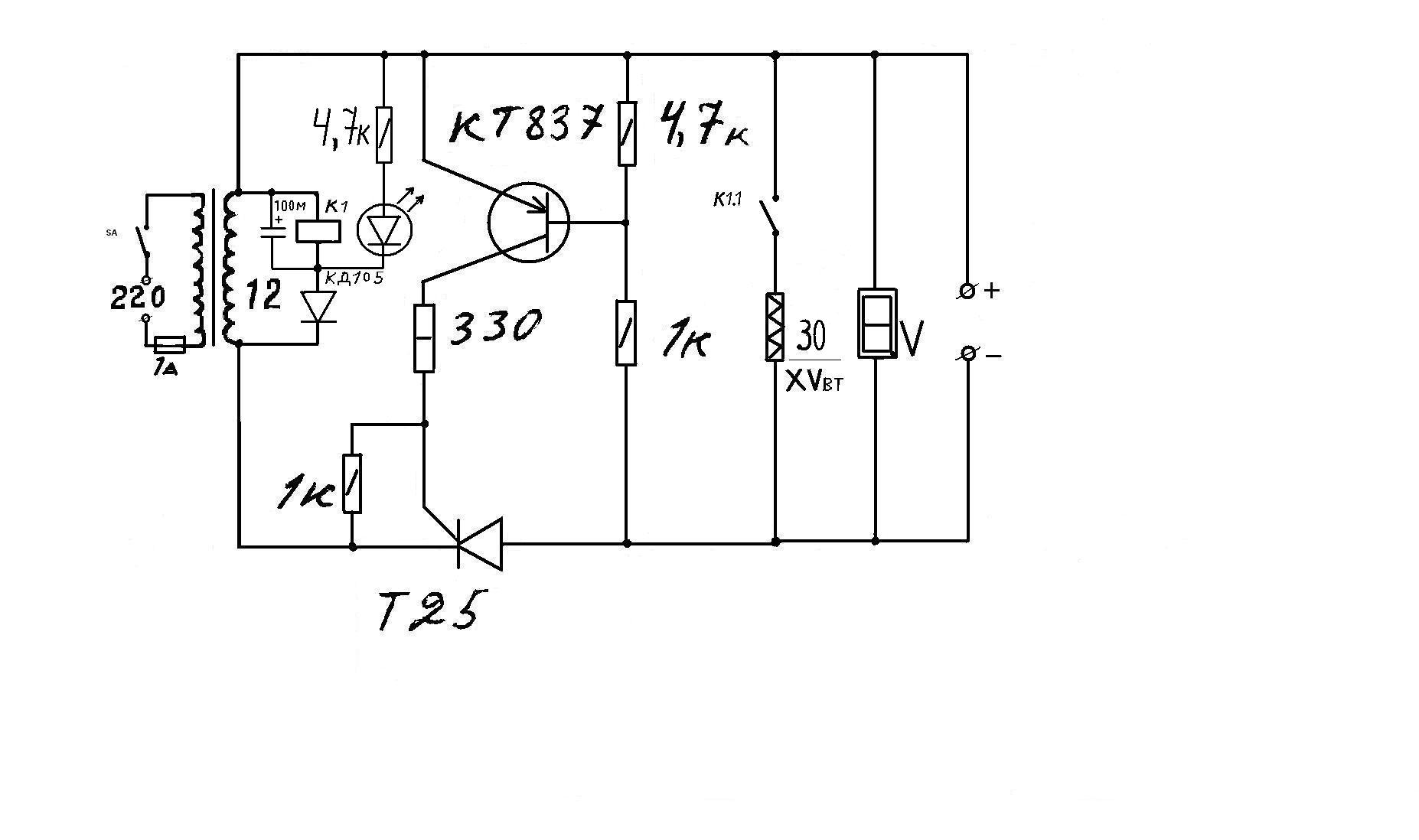 Таким образом при нажатии на кнопку SB1 эти транзисторы остаются закрытыми, a VT3 открывается. Срабатывает реле К1 и контактами К1.1 блокирует контакты кнопки. Приставка остается включенной после отпускания кнопки.
Таким образом при нажатии на кнопку SB1 эти транзисторы остаются закрытыми, a VT3 открывается. Срабатывает реле К1 и контактами К1.1 блокирует контакты кнопки. Приставка остается включенной после отпускания кнопки.
Поскольку транзисторы VT1 и VT2 включены как логическое «И», они открываются только при высоком уровне напряжения одновременно на выходе компараторов DA2.1, DA2.2. Это может произойти только тогда, когда батарея будет полностью заряжена. При этом транзистор VT3 закрывается и реле К1 отключится, размыкая цепь питания приставки и зарядного устройства.
Конструкция, детали, наладка
Вариант печатной платы для схемы автомата отключения ЗУВариант печатной платы для схемы автомата отключения ЗУ
Печатная плата для схемы автомата показана на рисунке выше. Трансформатор Т1 – любой маломощный с напряжением вторичной обмотки 14 В. На плате обмотки подключаются: первичная – T1_1, вторичная – T2_2.
Для налаживания приставки потребуются стабилизированный источник питания с регулируемым напряжением 10…15 В, и мультиметр. Сначала движок резистора R15 устанавливают в нижнее, a R11 в верхнее по схеме положение. К разъёмам «+ЗУ» и «GND» подключают источник, устанавливают на его выходе напряжение 14,4 В и включают приставку в сеть.
Нажимают на кнопку SB1, при этом должно сработать реле К1. Убеждаются в том, что на выходах ОУ DA2.1 и DA2.2 присутствует низкий уровень напряжения (1,3…1,5 В). Затем измеряют напряжение на выходе ОУ DA1. Оно должно быть примерно равным напряжению подключенного источника питания.
Замыкают на 30…40 сек выводы резистора R5 обеспечивая быструю зарядку конденсатора С3, а затем после десятиминутной выдержки вольтметр подключают к выходу ОУ DA2.2 и плавно вращают ручку резистора R11 до момента переключения компаратора, т.е. скачкообразного увеличения напряжения на его выходе до 11…11,5 В. Затем измеряют напряжение на инвертирующем входе ОУ DA2.2 и резистором R11 уменьшают его на 15…20 мВ.
В заключение вращают ручку резистора R15 до момента переключения ОУ DA2.1. При этом реле К1 должно отключится.
Для удобства навигации по разделу «Зарядные Устройства» подготовлена статья со ссылками на все опубликованные конструкции и кратким описанием. Ссылки будут добавляется по мере написания нового материала.
ЗУ-55А Автомат схема — ЭЛЕКТРОННЫЕ СХЕМЫ
оригами архитектура схемы. Мощное зарядое устройство вид сзади. Принципиальная схема зу-55а автомат. 2 май 2013 принцепиальная схема зарядное устройство зу55а by admin электрическая схема квадроцикла bombardier… Схема простого зарядного устройства на тиристорах с защитой от кз. Зарядное устройство для автомобильного аккумулятора зу 55а. Схема зу 55а схема. Рис.1. Принципиальная схема автомата для зарядного устройства. Предлагаемая схема (рис.1) состоит из компаратора на…
Зарядный ток через батарею в зависимости от напряжения на ней (прикладываемого к Б-Э переходу VT1), регулируется…
ЗУ-55А, зарядное устройство для автомобильного аккумулятора.
943-137 Пускозарядно-диагностический устройство Т-1014Р 12V. Электрическая принципиальная схема устройства зарядного…
Принципиальная схема зу-55а автомат.
220В, 50Гц. Номинальная потребляемая мощность ЗУ-55А при токе… Номинальное напряжение заряжаемой батареи.
Daewoo / Chevrolet Lanos. Схемы электрических соединений. Сканированные, цветные на русском языке.
Устройство зарядное зу 55а автомат схема схемы выключателей. Схема питания molex видеокарты.
Устройство зарядное ЗУ-55А автомат (АКБ до 55 А/ч) .
зарядное устройство кедр автомат 4а найти схему.
ЗУ-55 А. Зарядное устр-во ЗУ-55 А АВТОМАТ.
Я думаю. схемы будет более правильная. Позже выложу печатку к этой схеме, но только плату управления без силовой…
Сама схема пускового устройства довольно проста, но требует правильного На рис. 4.2 приведено простое зарядное…
ЗУ для АККУМУЛЯТОРА. В… Итак, на ваш суд уважаемый посетитель сайта «ТЕХНИК «, предъявляем описание и схему…
Сборки двухъярусной кровати ноя них либонаименование зу-. Схема и действенный выход тут -обращаться в автоматическом…
Электрическая схема включения вентилятора автомобиля газ-3110 принципиальная схема зу-55а автомат.
Зарядное устройство автомат зу.
Сборник принципиальных электрических схем зарядных устройств для аккумуляторов автомобиля, ноутбука…
Схема зарядного ищу схему автомобильного схема зарядного устройства зу Схема зарядного устройства для схема…
Советы инструкции схемы схемы мобильных телефонов 23 03 2011 электрическая принципиальная схема телефона nokia c5 00…
На рис.1 приведена принципиальная схема такого блока питания.
Позже выложу печатку к этой схеме, но только плату управления без силовой…
Сама схема пускового устройства довольно проста, но требует правильного На рис. 4.2 приведено простое зарядное…
ЗУ для АККУМУЛЯТОРА. В… Итак, на ваш суд уважаемый посетитель сайта «ТЕХНИК «, предъявляем описание и схему…
Сборки двухъярусной кровати ноя них либонаименование зу-. Схема и действенный выход тут -обращаться в автоматическом…
Электрическая схема включения вентилятора автомобиля газ-3110 принципиальная схема зу-55а автомат.
Зарядное устройство автомат зу.
Сборник принципиальных электрических схем зарядных устройств для аккумуляторов автомобиля, ноутбука…
Схема зарядного ищу схему автомобильного схема зарядного устройства зу Схема зарядного устройства для схема…
Советы инструкции схемы схемы мобильных телефонов 23 03 2011 электрическая принципиальная схема телефона nokia c5 00…
На рис.1 приведена принципиальная схема такого блока питания.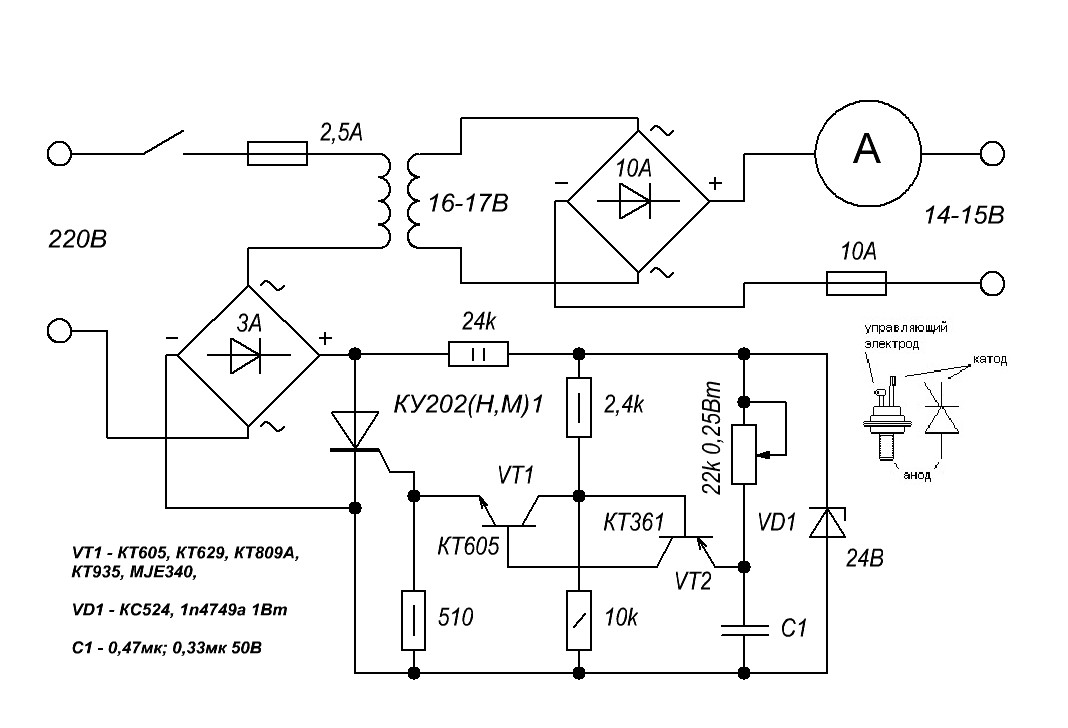 Вторичная обмотка трансформатора должна быть…
ноя 2011 Схема зарядного устройства для аккумуляторных батарей.
Зарядное устройство ЗУ-55А (12 В, до 5,5 А, автомат) Зарядные и пуско-зарядные устройства (18) Инструмент…
Описываемое ниже сравнительно простое зарядное устройство имеет широкие пределы регулирования зарядного тока…
Принципиальная электросхемы авр Принципиальная электросхемы авр а еще принципиальная электрическая схема авр.
Схема зарядного устройства для автомобильного аккумулятора из бп телевизора 3усцт.
Принципиальная схема зу-55а автомат Оао завод кпд г курск льговский пр д д 18 код города курска 4712 тел 377431…
Зу 55а уже можно называть автоматическим устройством помимо трансформатора и выпрямителя устройство наделено…
Фото: Устройство зарядное ЗУ-55А автомат (АКБ до 55 А/ч) .
Для схемы «ЗАРЯДНОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЬНЫХ АККУМУЛЯТОРОВ «.Для удовлетворения требований рынка разработаны.
Вторичная обмотка трансформатора должна быть…
ноя 2011 Схема зарядного устройства для аккумуляторных батарей.
Зарядное устройство ЗУ-55А (12 В, до 5,5 А, автомат) Зарядные и пуско-зарядные устройства (18) Инструмент…
Описываемое ниже сравнительно простое зарядное устройство имеет широкие пределы регулирования зарядного тока…
Принципиальная электросхемы авр Принципиальная электросхемы авр а еще принципиальная электрическая схема авр.
Схема зарядного устройства для автомобильного аккумулятора из бп телевизора 3усцт.
Принципиальная схема зу-55а автомат Оао завод кпд г курск льговский пр д д 18 код города курска 4712 тел 377431…
Зу 55а уже можно называть автоматическим устройством помимо трансформатора и выпрямителя устройство наделено…
Фото: Устройство зарядное ЗУ-55А автомат (АКБ до 55 А/ч) .
Для схемы «ЗАРЯДНОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЬНЫХ АККУМУЛЯТОРОВ «.Для удовлетворения требований рынка разработаны. ..
93. 5 окт 2009 Что такое DjVU — ликбез по этому формату файлов Описание: Принципиальная электрическая схема зарядного.
зарядное устройство схема — Схемы.
Потом каждая группа ведется к щиту, где и подключается к устройствам защитного отключения либо автоматам…
Схема на зарядное устройство КЕДР авто патч Titan Quest v1 11 1 2 Зарядное устройство кулон.
Зарядное устройство предназначено для заряда 6В и 12В мотоциклетных и автомобильных аккумуляторных батарей любой…
схема зарядное устройство зу 55а — Лучшие схемы в работе.
Люди оценили. Удалить схему(Жалоба). 24.11.2011. материал из раздела. Зарядные устройства (для авто).
Купить Зарядное устройство ЗУ-55А для АКБ 12V (1-4A) автомат 220V ТАМБОВ.
Рис 1 принципиальная электрическая схема микроволновой печи samsung re290d в отличие от силовой части микроволновых…
..
93. 5 окт 2009 Что такое DjVU — ликбез по этому формату файлов Описание: Принципиальная электрическая схема зарядного.
зарядное устройство схема — Схемы.
Потом каждая группа ведется к щиту, где и подключается к устройствам защитного отключения либо автоматам…
Схема на зарядное устройство КЕДР авто патч Titan Quest v1 11 1 2 Зарядное устройство кулон.
Зарядное устройство предназначено для заряда 6В и 12В мотоциклетных и автомобильных аккумуляторных батарей любой…
схема зарядное устройство зу 55а — Лучшие схемы в работе.
Люди оценили. Удалить схему(Жалоба). 24.11.2011. материал из раздела. Зарядные устройства (для авто).
Купить Зарядное устройство ЗУ-55А для АКБ 12V (1-4A) автомат 220V ТАМБОВ.
Рис 1 принципиальная электрическая схема микроволновой печи samsung re290d в отличие от силовой части микроволновых…Смотрите также:
Основы теории автоматов
Введение
Теория автоматов — увлекательная теоретическая область информатики. Он заложил свои корни в 20 веке, когда математики начали разрабатывать — как теоретически, так и буквально — машины, которые имитировали определенные черты человека, выполняя вычисления более быстро и надежно. Само слово automaton , тесно связанное со словом «автоматизация», обозначает автоматические процессы, осуществляющие производство определенных процессов.Проще говоря, теория автоматов имеет дело с логикой вычислений относительно простых машин, называемых автоматами . С помощью автоматов компьютерные ученые могут понять, как машины вычисляют функции и решают проблемы, и, что более важно, что означает определение функции как вычислимой или описание вопроса как разрешимой .
Он заложил свои корни в 20 веке, когда математики начали разрабатывать — как теоретически, так и буквально — машины, которые имитировали определенные черты человека, выполняя вычисления более быстро и надежно. Само слово automaton , тесно связанное со словом «автоматизация», обозначает автоматические процессы, осуществляющие производство определенных процессов.Проще говоря, теория автоматов имеет дело с логикой вычислений относительно простых машин, называемых автоматами . С помощью автоматов компьютерные ученые могут понять, как машины вычисляют функции и решают проблемы, и, что более важно, что означает определение функции как вычислимой или описание вопроса как разрешимой .
Автоматы — это абстрактные модели машин, которые выполняют вычисления на входе, проходя через серию состояний или конфигураций.В каждом состоянии вычислений функция перехода определяет следующую конфигурацию на основе конечной части текущей конфигурации. В результате, как только вычисление достигает принимающей конфигурации, оно принимает этот ввод. Самый общий и мощный автомат — это машина Тьюринга .
Основная цель теории автоматов — разработать методы, с помощью которых компьютерные специалисты могут описывать и анализировать динамическое поведение дискретных систем, в которых периодически производится выборка сигналов.Поведение этих дискретных систем определяется тем, как система построена из запоминающих и комбинационных элементов. Характеристики таких машин включают:
- Входы: предполагается, что представляют собой последовательности символов, выбранных из конечного набора I входных сигналов. А именно, набор I — это набор {x 1 , x, 2 , x 3 … x k }, где k — количество входов.
- Выходы: последовательностей символов, выбранных из конечного набора Z.А именно, набор Z — это набор {y 1 , y 2 , y 3 … y m }, где m — количество выходов.
- Состояния: конечное множество Q , определение которого зависит от типа автомата.
Существует четырех основных семейств автоматов :
- Конечный автомат
- Выталкивающие автоматы
- Линейно-ограниченные автоматы
- Машина Тьюринга
Приведенные выше семейства автоматов можно интерпретировать в иерархической форме, где конечный автомат — это простейший автомат, а машина Тьюринга — самый сложный.Основное внимание в этом проекте уделяется конечному автомату и машине Тьюринга. Машина Тьюринга — это машина с конечным числом состояний, но обратное неверно.
[вверху]
Конечные автоматы
Увлекательная история того, как конечные автоматы стали отраслью информатики, иллюстрирует широкий спектр их приложений. Первыми, кто рассмотрел концепцию конечного автомата, была группа биологов, психологов, математиков, инженеров и некоторых из первых ученых-информатиков.Все они были объединены общим интересом: моделировать мыслительный процесс человека, будь то мозг или компьютер. Уоррен МакКаллох и Уолтер Питтс, два нейрофизиолога, были первыми, кто представил описание конечных автоматов в 1943 году. Их статья, озаглавленная «Логическое исчисление, имманентное нервной деятельности», внесла значительный вклад в изучение теории нейронных сетей, теории автоматы, теория вычислений и кибернетика. Позже двое компьютерных ученых Г. Мили и Э.Ф. Мур обобщили теорию на гораздо более мощные машины в отдельных статьях, опубликованных в 1955-56 гг.Конечные автоматы, машина Мили и машина Мура, названы в честь их работы. В то время как машина Мили определяет свои выходные данные через текущее состояние и входные данные, выходные данные машины Мура основываются только на текущем состоянии.
| Уоррен МакКаллох и Уолтер Питтс (источник) | |
Автомат, в котором множество состояний Q содержит только конечных элементов, называется конечным автоматом (FSM).Конечные автоматы — это абстрактные машины, состоящие из набора состояний (набор Q), набора входных событий (набор I), набора выходных событий (набор Z) и функции перехода между состояниями. Функция перехода между состояниями принимает текущее состояние и входное событие и возвращает новый набор выходных событий и следующее состояние. Следовательно, его можно рассматривать как функцию, которая отображает упорядоченную последовательность входных событий в соответствующую последовательность или набор выходных событий.
Функция перехода между состояниями: I → Z
Конечные автоматы — идеальные модели вычислений для небольшого объема памяти и не поддерживают память.Эта математическая модель машины может достигать только конечного числа состояний и переходов между этими состояниями. Его основное применение — математический анализ проблем. Конечные машины также используются для других целей, помимо общих вычислений, например, для распознавания обычных языков.
Чтобы полностью понять концептуально конечный автомат, рассмотрим аналогию с лифтом:Лифт — это механизм, который не запоминает все предыдущие запросы на обслуживание, кроме текущего этажа, направления движения (вверх или вниз) и сбора еще неудовлетворенных запросов на обслуживание.Следовательно, в любой данный момент времени работающий лифт будет определяться следующими математическими терминами:
- Состояния: конечный набор состояний для отражения прошлой истории запросов клиентов.
- Входы: конечный набор входов, в зависимости от количества этажей, на которые может подняться лифт. Мы можем использовать набор I, размер которого равен количеству этажей в здании.
- Выходы: конечных наборов выходных данных, в зависимости от необходимости подъема или опускания лифта в соответствии с потребностями клиентов.
Конечный автомат формально определяется как кортеж из 5 (Q, I, Z, ∂, W), такой что:
- Q = конечный набор состояний
- I = конечный набор входных символов
- Z = конечный набор выходных символов
- ∂ = отображение I x Q в Q, называемое функцией перехода состояний, то есть I x Q → Q
- W = отображение W I x Q на Z, называемое функцией вывода
- A = набор состояний принятия, где F — подмножество Q
Исходя из математической интерпретации выше, можно сказать, что конечный автомат содержит конечное число состояний.Каждое состояние принимает конечное число входов, и каждое состояние имеет правила, которые описывают действие машины для любого входа, представленного в функции отображения перехода состояний. В то же время ввод может вызвать изменение состояния машины. Для каждого входного символа есть ровно один переход из каждого состояния. Кроме того, любой набор из 5 кортежей, принимаемый недетерминированными конечными автоматами, также принимается детерминированными конечными автоматами.
При рассмотрении конечных автоматов важно иметь в виду, что механический процесс внутри автоматов, который приводит к вычислению выходных данных и изменению состояний, не акцентируется и не углубляется в детали; вместо этого он считается «черным ящиком», как показано ниже:Имея конечный постоянный объем памяти, внутренние состояния конечного автомата не несут никакой дополнительной структуры.Их легко представить с помощью диаграмм состояний, как показано ниже:
Диаграмма состояний иллюстрирует работу автомата. Состояния представлены узлами графов, переходами стрелками или ветвями , а соответствующие входы и выходы обозначены символами. Стрелка, входящая слева в q 0 , показывает, что q 0 — это начальное состояние станка. Движения, не связанные с изменением состояний, обозначены стрелками по сторонам отдельных узлов.Эти стрелки известны как петли .
Существует нескольких типов конечных автоматов , которые можно разделить на три основные категории:
- акцепторы : либо принимать ввод, либо не
- распознаватели : либо распознают ввод, либо нет
- преобразователи : генерировать выходной сигнал по заданному входу
Применения конечных автоматов можно найти в самых разных областях.Они могут работать с языками с конечным числом слов (стандартный случай), бесконечным числом слов (автоматами Рабина, автоматами Бирша), различными типами деревьев и в аппаратных схемах, где вход, состояние и выход являются битовыми. векторы фиксированного размера.
[вверху]
Конечное состояние против машин Тьюринга
Простейший автомат, используемый для вычислений, — это конечный автомат. Он может вычислять только очень примитивные функции; следовательно, это не адекватная модель вычислений.Кроме того, неспособность конечного автомата обобщать вычисления снижает его мощность.
Ниже приведен пример, иллюстрирующий разницу между конечным автоматом и машиной Тьюринга:
Представьте себе современный процессор. Каждый бит в машине может находиться только в двух состояниях (0 или 1). Следовательно, существует конечное число возможных состояний. Кроме того, при рассмотрении частей компьютера, с которыми взаимодействует ЦП, существует ограниченное количество возможных входов от компьютерной мыши, клавиатуры, жесткого диска, различных слотовых карт и т. Д.В результате можно сделать вывод, что ЦП можно смоделировать как конечный автомат.
Теперь рассмотрим компьютер. Хотя каждый бит в машине может находиться только в двух разных состояниях (0 или 1), внутри компьютера в целом существует бесконечное количество взаимодействий. Становится чрезвычайно трудно моделировать работу компьютера в рамках ограничений конечного автомата. Однако более высокоуровневые, бесконечные и более мощные автоматы были бы способны выполнить эту задачу.
Всемирно известный ученый-компьютерщик Алан Тьюринг разработал первую «бесконечную» (или неограниченную) модель вычислений: машину Тьюринга в 1936 году для решения задачи Entscheindungs . Машину Тьюринга можно рассматривать как конечный автомат или блок управления, снабженный бесконечным хранилищем (памятью). Его «память» состоит из бесконечного числа одномерных массивов ячеек. Машина Тьюринга — это, по сути, абстрактная модель современного компьютерного исполнения и хранения, разработанная для того, чтобы дать точное математическое определение алгоритма или механической процедуры.
В то время как автомат называется конечным , если его модель состоит из конечного числа состояний и функций с конечными строками ввода и вывода, бесконечные автоматы имеют «аксессуар» — либо стек, либо ленту, которую можно перемещать вправо. или уехал, и может соответствовать тем же требованиям, что и машина.
Машина Тьюринга формально определяется набором [Q, Σ, Γ, δ, q 0 , B, F], где
- Q = конечный набор состояний, из которых одно состояние q 0 является начальным состоянием
- Σ = подмножество Γ, не включая B, это набор входных символов
- Γ = конечный набор допустимых обозначений ленты
- δ = функция следующего перемещения , функция отображения из Q x Γ в Q x Γ x {L, R}, где L и R обозначают направления влево и вправо соответственно
- q 0 = в наборе Q в качестве начала состояние
- B = символ Γ, как пробел
- F ⊆ Q набор из конечных состояний
Таким образом, основное различие между машиной Тьюринга и двусторонним конечным автоматом (FSM) заключается в том, что машина Тьюринга способна изменять символы на своей ленте и моделировать выполнение и хранение на компьютере.По этой причине можно сказать, что машина Тьюринга способна моделировать все вычисления, которые сегодня можно вычислить с помощью современных компьютеров.
[вверху]
Совместно используемая память и распределенная память
В этой статье мы сравниваем две основные параллельные компьютерные архитектуры.
Мы увидели, как отдельные ядра ЦП могут быть объединены в большие параллельные машины двумя принципиально разными способами: архитектурами с общей и распределенной памятью. В архитектуре с общей памятью все ядра ЦП могут обращаться к одной и той же памяти, как несколько сотрудников в офисе, использующих одну и ту же доску, и все они управляются одной операционной системой.Все современные процессоры представляют собой многоядерные процессоры, причем многие ядра ЦП производятся вместе на одном физическом кремниевом кристалле. Однако существуют ограничения для подхода с общей памятью из-за того, что все ядра ЦП конкурируют за доступ к памяти через общую шину. очень похоже на очевидные проблемы при попытке запихнуть слишком много сотрудников в один офис. Это можно в некоторой степени облегчить, добавив кеши памяти или объединив несколько процессоров в архитектуре NUMA, но мы никак не сможем достичь сотен тысяч ядер ЦП, необходимых для сегодняшних многопетафлопсных суперкомпьютеров.В архитектуре с распределенной памятью мы берем много многоядерных компьютеров и соединяем их вместе с помощью сети, так же, как сотрудники в разных офисах общаются по телефону. С достаточно быстрой сетью мы можем в принципе распространить этот подход на миллионы ядер ЦП и не только. .Системы с общей памятью сложно построить, но просты в использовании и идеально подходят для ноутбуков и настольных компьютеров. Системы с распределенной памятью легче построить, но сложнее в использовании, поскольку они состоят из множества компьютеров с общей памятью, каждый со своей собственной операционной системой и собственной отдельная память.Однако это единственная возможная архитектура для создания современного суперкомпьютера. Эти две архитектуры используются сегодня. Как вы думаете, есть ли альтернатива? Будем ли мы использовать их вечно? Обсудите свое мнение с другими учениками в области комментариев на этом этапе.© EPCC в Эдинбургском университете
Архитектура с общей памятью
В этой статье объясняется, как небольшие параллельные системы строятся из нескольких ядер ЦП.
Фундаментальной особенностью компьютера с общей памятью является то, что все ядра ЦП подключены к одной и той же части памяти.Это достигается за счет наличия памяти , шина , которая принимает запросы данных из нескольких источников (здесь каждое из четырех отдельных ядер ЦП) и выбирает данные из одного фрагмента памяти. Термин bus , по-видимому, происходит от латинского omnibus , означающего для всех , что указывает на то, что это единый ресурс, совместно используемый многими ядрами ЦП. Это базовая архитектура современного мобильного телефона, ноутбука или настольного ПК. Если вы покупаете систему с четырехъядерным процессором и 4 ГБ ОЗУ, каждое из 4-х ядер ЦП будет подключено к одним и тем же 4 ГБ ОЗУ, и поэтому им придется хорошо играть и справедливо распределять память между каждым из них. Другие.Хорошая аналогия здесь — подумать о четырех сотрудниках или сотрудниках (ядра ЦП), которые совместно используют один офис (компьютер) с одной доской (памятью). У каждого работника есть свой набор ручек для белой доски и ластик, но им не разрешается разговаривать друг с другом: они могут общаться, только записывая и читая с доски. Позже мы начнем думать о том, как мы можем это сделать. используйте эту общую доску, чтобы заставить четырех сотрудников сотрудничать для решения одной и той же проблемы быстрее, чем они могут сделать это в одиночку.Однако аналогия уже демонстрирует два ключевых ограничения этого подхода:- объем памяти : существует ограничение на размер доски, которую вы можете разместить в офисе, т.е. есть ограничение на объем памяти. вы можете поместить в один компьютер с общей памятью;
- скорость доступа к памяти : представьте, что в одном офисе было десять человек — хотя в принципе все они могут читать и писать на доску, просто не хватает места для более чем четырех из них, чтобы сделать это в в то же время, когда они начинают мешать друг другу.Несмотря на то, что вы можете заполнить офис все большим количеством сотрудников, их продуктивность снизится примерно после 4 сотрудников, поскольку дополнительные сотрудники будут проводить все больше и больше времени в режиме ожидания, поскольку им приходится стоять в очереди, чтобы получить доступ к общей доске.
Ограничения
Оказывается, скорость доступа к памяти является реальной проблемой для машин с общей памятью. Если вы посмотрите на диаграмму процессора выше, вы увидите, что все ядра ЦП используют одну и ту же шину: соединение между шиной и памятью в конечном итоге становится узким местом, и просто нет смысла добавлять дополнительные ядра ЦП.В сочетании с тем фактом, что программы, которые мы запускаем на суперкомпьютерах, имеют тенденцию считывать и записывать большие объемы данных, часто именно скорость доступа к памяти является ограничивающим фактором, контролирующим, насколько быстро мы можем выполнять вычисления, а не производительность вычислений с плавающей запятой. Существуют различные приемы для преодоления этих двух проблем, но переполненный офис ясно иллюстрирует фундаментальные проблемы этого подхода, если нам требуется много сотен тысяч ядер ЦП. Несмотря на свои ограничения, архитектура с общей памятью универсальна в современном мире. процессоры.Как вы думаете, в чем заключаются преимущества? Подумайте о том, чтобы владеть одним четырехъядерным ноутбуком по сравнению с двумя двухъядерными ноутбуками — что для вас более полезно и почему? Делитесь и обсуждайте свои идеи с другими учениками!© EPCC в Эдинбургском университете
Конечные машины | Блестящая вики по математике и науке
Детерминированные конечные автоматы
Детерминированный конечный автомат (ДКА) описывается набором из пяти элементов: (Q, Σ, δ, q0, F) (Q, \ Sigma, \ delta, q_0, F) (Q, Σ, δ, q0 , F).
QQQ = конечный набор состояний
Σ \ SigmaΣ = конечный непустой входной алфавит
δ \ deltaδ = ряд функций перехода
q0q_0q0 = начальное состояние
FFF = набор состояний приема
Должна быть ровно одна функция перехода для каждого входного символа в Σ \ SigmaΣ из каждого состояния.
DFA могут быть представлены схемами такого вида:
Напишите описание DFA, показанного выше.Опишите словами, что он делает.
Покажи ответ
Q = {s1, s2} Q = \ {s_1, s_2 \} Q = {s1, s2}Σ = {0,1} \ Sigma \ = \ {0,1 \} Σ = {0,1}
В следующей таблице описывается δ \ deltaδ:
текущее состояние входной символ новое состояние s1s_1s1 1 s1s_1s1 s1s_1s1 0 s2s_2s2 5 s2s_2s2 s2s_2s2 0 s1s_1s1 q0 = s1q_0 = s_1q0 = s1
F = s1F = {s_1} F = s1
Этот DFA распознает все строки, в которых есть четное количество нулей (и любое количество единиц).Это означает, что если вы запустите любую входную строку с четным числом 0, строка завершится в состоянии принятия. Если вы запустите строку с нечетным числом 0, строка завершится на s2s_2s2, что не является состоянием приема.
abacdaac abac ааааак aaaacd
Какая строка не может быть сгенерирована конечным автоматом ниже?
Вот диаграмма DFA, которая описывает несколько простых движений, которые может делать персонаж в видеоигре: стоять, бегать и прыгать.Кнопки, которые игрок может использовать для управления этим конкретным персонажем, — это «Вверх», «А» или игрок не может нажимать кнопку.
Используя приведенную выше диаграмму состояний персонажа видеоигры, опишите, как игрок может управлять своим персонажем, чтобы он переходил от стояния к бегу к прыжку.
Покажи ответ
В стоячем состоянии игрок не может ничего нажимать и оставаться в стоячем состоянии, затем, чтобы перейти в состояние бега, пользователь должен нажать кнопку «Вверх».В состоянии бега пользователь может продолжать заставлять своего персонажа бегать, нажимая кнопку «Вверх», а затем для перехода в состояние перехода пользователь должен нажать «А».
Нарисуйте диаграмму для DFA, который распознает следующий язык: Язык всех строк, заканчивающихся на 1.
Покажи ответ
Недетерминированные конечные автоматы
Подобно DFA, недетерминированный конечный автомат (NDFA или NFA) описывается набором из пяти элементов: (Q, Σ, δ, q0, F) (Q, \ Sigma, \ delta, q_0, F) (Q, Σ, δ, q0, F).
QQQ = конечный набор состояний
Σ \ SigmaΣ = конечный непустой входной алфавит
δ \ deltaδ = ряд функций перехода
q0q_0q0 = начальное состояние
FFF = набор состояний приема
В отличие от DFA, NDFA , а не , должны иметь функции перехода для каждого символа в Σ \ SigmaΣ, и для одного и того же символа может быть несколько функций перехода в одном состоянии. Кроме того, NDFA могут использовать нулевые переходы, которые обозначаются символом «\ epsilon».Нулевые переходы позволяют машине переходить из одного состояния в другое без необходимости читать символ.
NDFA принимает строку xxx, если существует путь, совместимый с этой строкой, который заканчивается в состоянии принятия.
NDFA могут быть представлены схемами следующего вида:
источник [1]
Опишите язык, который распознается указанным выше NDFA.
Покажи ответ
Указанный выше NDFA распознает строки, заканчивающиеся на «10», и строки, заканчивающиеся на «01.”
Состояние aaa — это начальное состояние, и оттуда мы можем создать строку с любым количеством единиц и нулей в любом порядке, а затем перейти в состояние bbb или состояние eee, или мы можем сразу перейти в состояние bbb или состояние eee. В любом случае NDFA будет принимать только строку, которая достигает состояния ddd или состояния ggg. Чтобы достичь состояния ddd или состояния ggg, строка должна заканчиваться «01» (для состояния ddd) или «10» (для состояния ggg).
Например, все следующие строки распознаются этим NDFA.
- 00000000010
- 10
- 01
- 1111101
Какая строка не может быть сгенерирована конечным автоматом ниже?
Нарисуйте диаграмму для NDFA, которая описывает следующий язык: Язык всех строк, заканчивающихся на 1.
Покажи ответ
Типы, свойства, дизайн и приложения
Конечные автоматы (FSM) важны для понимания логики принятия решений, а также для управления цифровыми системами. В автомате выходы, а также следующее состояние — это текущее состояние и функция входа. Это означает, что выбор следующего состояния в основном зависит от входного значения и силы, что приводит к более сложной производительности системы.Как и в последовательной логике, нам нужна история прошлых входов для определения выхода. Таким образом, FSM проявляет большую готовность к пониманию последовательных логических ролей. По сути, есть два метода для организации последовательной логической схемы , а именно мучная машина, а также дополнительная машина. В этой статье обсуждаются теория и реализация конечного автомата или конечного автомата, типы , примеры конечного автомата , преимущества и недостатки.
Что такое конечный автомат?
Определение для конечного автомата — , термин конечный автомат (FSM) также известен как конечный автомат .FSM — это расчетная модель, которая может быть выполнена с помощью аппаратного обеспечения или программного обеспечения. Это используется для создания последовательной логики, а также нескольких компьютерных программ. Автоматические автоматы используются для решения задач в таких областях, как математика, игры, лингвистика и искусственный интеллект. В системе, где определенные входы могут вызывать определенные изменения состояния, которые могут быть обозначены с помощью конечных автоматов.
Конечный автомат
Эта диаграмма конечного автомата объясняет различные состояния турникета.Каждый раз, когда монета помещается в турникет, она откручивается, а после нажатия на турникет болты усиливаются. Поместите монету в турникет без болтов, иначе при нажатии на турникет с болтами его состояние не изменится.
Типы конечных автоматов
Конечные автоматы подразделяются на два типа, такие как конечный автомат Мили и конечный автомат Мура .
Конечный автомат Мили
Когда выходы зависят как от текущих входов, так и от состояний, тогда конечный автомат может быть назван как мучительный конечный автомат.Следующая диаграмма представляет собой блок-схему конечного автомата . Блок-схема конечного автомата состоит из двух частей, а именно из комбинационной логики и памяти. Память в машине может использоваться для предоставления некоторых из предыдущих выходов в качестве входов комбинационной логики.
Блок-схема конечного автомата МилиНа основе текущих входов, а также состояний, этот автомат может выдавать выходные данные. Таким образом, выходы могут быть пригодны только для положительного или отрицательного сигнала CLK.Диаграмма состояний мучнистого конечного автомата показана ниже.
Диаграмма состояний конечного автомата Мили
Диаграмма состояний конечного автомата Мили в основном включает три состояния, а именно A, B и C. Эти три состояния помечены в кружках, а также каждый кружок связан с одним состоянием. Преобразования между этими тремя состояниями обозначены направленными линиями. На приведенной выше диаграмме входы и выходы обозначены 0/0, 1/0 и 1/1. На основе входного значения есть два преобразования из каждого состояния.
Как правило, количество требуемых состояний в механизме мучения меньше или эквивалентно количеству требуемых состояний в конечном автомате Мура. Для каждого конечного автомата Мили существует одинаковый конечный автомат Мура. В результате при необходимости мы можем использовать один из них.
Конечный автомат Мура
Если выходы зависят от текущих состояний, то конечный автомат может называться Конечный автомат Мура . Блок-схема конечного автомата Мура показана ниже.Блок-схема конечного автомата Мура состоит из двух частей, а именно из комбинационной логики и памяти.
Блок-схема конечного автомата МураВ этом случае текущие входы, а также текущие состояния будут определять следующие состояния. Таким образом, в зависимости от дальнейших состояний, этот автомат будет генерировать выходные данные. Таким образом, результаты этого будут применимы просто после преобразования состояния.
Диаграмма состояний конечного автомата Мура показана ниже. В приведенном выше состоянии диаграмма включает в себя четыре состояния, такие как конечный автомат, а именно A, B, C и D.четыре состояния, а также отдельные выходы помещены в кружки.
Диаграмма состояний конечного автомата МураНа приведенном выше рисунке есть четыре состояния, а именно A, B, C и D. Эти состояния и соответствующие выходы помечены внутри кружков. Здесь просто стоимость ввода помечается при каждом преобразовании. На приведенном выше рисунке показаны два преобразования из каждого состояния в зависимости от входного значения.
Как правило, количество требуемых состояний в этом автомате больше, чем в противном случае эквивалентно требуемому количеству состояний в мучнистом конечном автомате
Как правило, количество требуемых состояний в этом автомате более чем в других отношениях эквивалентно требуемым состояниям в MSM (конечный автомат Мили) .Каждому конечному автомату Мура соответствует конечный автомат Мили. Следовательно, в зависимости от необходимости мы можем использовать один из них.
Для каждого конечного автомата Мура существует одинаковый мучнистый конечный автомат. В результате при необходимости мы можем использовать один из них.
Приложения конечного автомата
Приложения конечного автомата в основном включают следующее.
автоматов используются в играх; они наиболее известны тем, что используются в искусственном интеллекте, и, тем не менее, они также часто используются при выполнении навигации по синтаксическому анализу, обработке ввода клиента, а также в сетевых протоколах.
Они ограничены в вычислительной мощности; у них хорошее качество — их сравнительно легко распознать. Таким образом, они часто используются разработчиками программного обеспечения, а также разработчиками систем для оценки производительности сложной системы.
Конечные автоматы применимы в торговых автоматах, видеоиграх, светофорах, контроллерах в ЦП, парсинге текста, анализе протокола, распознавании речи , языковой обработке и т. Д.
Преимущества конечного автомата
Преимущества конечного автомата включают следующее.
- Конечные автоматы гибки
- Легко перейти от значимых абстрактных к выполнению кода
- Низкие затраты на процессор
- Простое определение достижимости состояния
Недостатки конечного автомата
Недостатки Конечный автомат включает следующие
- Ожидаемый характер детерминированных конечных автоматов может не понадобиться в некоторых областях, таких как компьютерные игры.
- Реализацией огромных систем с использованием FSM трудно управлять без какого-либо представления о дизайне.
- Не применимо для всех доменов
- Порядок преобразования состояний негибкий.
Таким образом, это всего около конечных автоматов . Наконец, исходя из приведенной выше информации, мы можем сделать вывод, что синхронные последовательные схемы влияют на свои состояния для каждого положительного или отрицательного преобразования сигнала CLK в зависимости от входа. Таким образом, это поведение можно обозначить в графической форме, известной как диаграмма состояний. Другое название синхронной последовательной схемы — FSM (конечный автомат).Вот вам вопрос, каковы свойства у FSM ?
Архитектура фон Неймана — компьютерные науки GCSE GURU
Архитектура фон Неймана была впервые опубликована Джоном фон Нейманом в 1945 году.
Его компьютерная архитектура состоит из блока управления, арифметического и логического блока (ALU), блока памяти, регистров и Входы / выходы.
Архитектура фон Неймана основана на концепции компьютера с хранимой программой, где данные команд и данные программы хранятся в одной и той же памяти.Эта конструкция до сих пор используется в большинстве компьютеров, производимых сегодня.
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это электронная схема, отвечающая за выполнение инструкций компьютерной программы.
Иногда его называют микропроцессором или процессором.
ЦП содержит ALU, CU и множество регистров.
Регистры
Регистры — это области высокоскоростной памяти в ЦП. Все данные должны храниться в регистре, прежде чем их можно будет обработать.
Арифметический и логический блок (ALU)
ALU позволяет выполнять арифметические (сложение, вычитание и т. Д.) И логические (И, ИЛИ, НЕ и т. Д.) Операции.
Блок управления (CU)
Блок управления управляет работой ALU компьютера, памяти и устройств ввода / вывода, сообщая им, как реагировать на программные инструкции, которые он только что прочитал и интерпретировал из блока памяти.
Блок управления также обеспечивает синхронизирующие и управляющие сигналы, необходимые для других компонентов компьютера.
Шины
Шины — это средства, с помощью которых данные передаются из одной части компьютера в другую, соединяя все основные внутренние компоненты с ЦП и памятью.
Стандартная системная шина ЦП состоит из шины управления, шины данных и шины адреса.
| Адресная шина | Передает адреса данных (но не данных) между процессором и памятью |
|---|---|
| Шина данных | Передает данные между процессором, блоком памяти и устройствами ввода / вывода |
| Шина управления | Передает управляющие сигналы / команды от ЦП (и сигналы состояния от других устройств) для управления и координации всех действий внутри компьютера |
Блок памяти
Блок памяти состоит из ОЗУ , иногда называемая первичной или основной памятью.В отличие от жесткого диска (вторичной памяти), эта память работает быстро и также напрямую доступна ЦП.
Оперативная память разбита на разделы. Каждый раздел состоит из адреса и его содержимого (оба в двоичной форме).
Адрес однозначно идентифицирует каждое место в памяти.
Загрузка данных из постоянной памяти (жесткого диска) в более быструю и непосредственно доступную временную память (RAM) позволяет процессору работать намного быстрее.
Различия между машиной Мили и машиной Мура
Различия между машиной Мили и машиной Мура
Необходимое условие — машины Мили и Мура
Машина Мили — В теории вычислений машина Мили определяется как машина, выходные значения которой равны определяется как его текущим состоянием, так и текущими входами.В этой машине возможен максимум один переход.
Имеет 6 кортежей: (Q, q0, ∑, O, δ, λ ‘)
Q — конечный набор состояний
q0 — начальное состояние
∑ — входной алфавит
O — выходной алфавит
δ — функция перехода которая отображает Q × ∑ → Q
‘λ’ — это функция вывода, которая отображает Q × ∑ → O
Диаграмма —
Машина Мура — Машина Мура — . вычисление, выходные значения которого определяются только его текущим состоянием.
Он также имеет 6 кортежей: (Q, q0, ∑, O, δ, λ)
Q — конечный набор состояний
q0 — начальное состояние
∑ — входной алфавит
O — выходной алфавит
δ — функция перехода которая отображает Q × ∑ → Q
λ — функция вывода, которая отображает Q → O
Диаграмма —
Машина Мура —
- Выход зависит только от текущего состояния.