Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.


Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.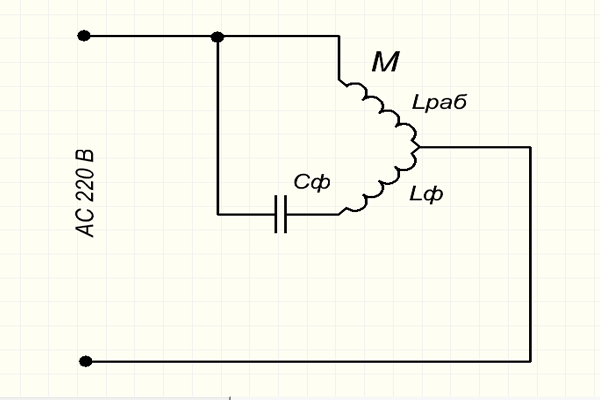
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Частотник для однофазного электродвигателя, принцип действия
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.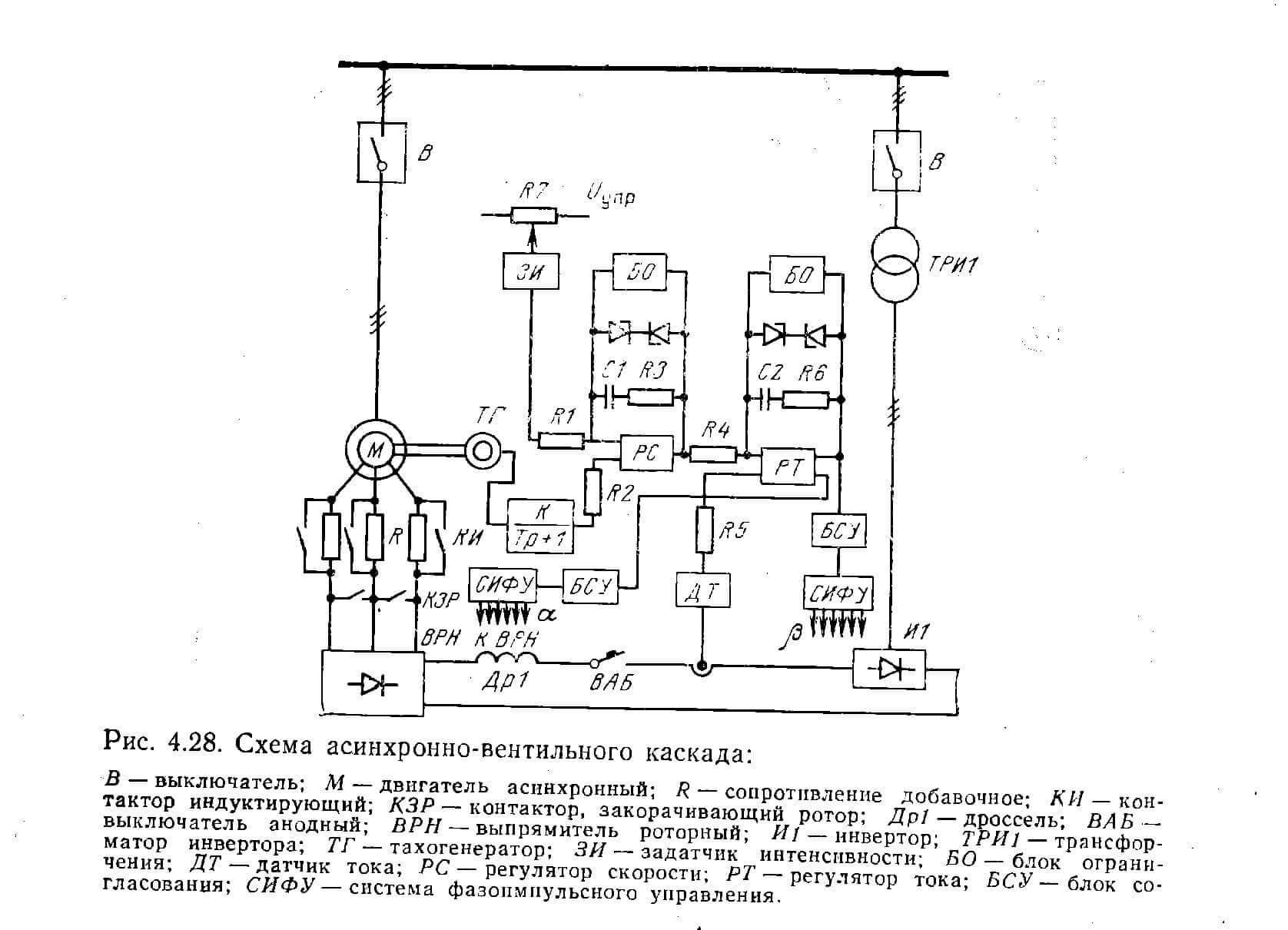
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
 Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.

Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.

Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.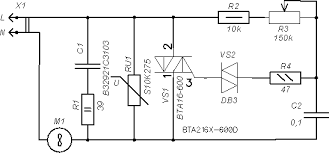
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
Регулирование скорости вращения двигателей переменного тока — Студопедия
Практика показывает, что во многих случаях, когда требуется получить глубокое и плавное регулирование скорости, применяют электроприводы постоянного тока. Использование таких двигателей даёт выгодное соотношение общей стоимости электропривода и его функциональных характеристик, поскольку именно двигатели постоянного тока позволяют более простыми средствами осуществить качественное регулирование скорости. Однако при использовании двигателей постоянного тока необходимо преобразовывать переменный ток в постоянный. Это преобразование всегда связано с потерями энергии и увеличением капитальных затрат на преобразовательную установку. Поэтому в ряде регулируемых установок применяют двигатели переменного тока, более простые, дешёвые, надёжные и экономичные в эксплуатации.
Чаще всего применяются асинхронные двигатели с короткозамкнутым ротором, реже асинхронные двигатели с контактными кольцами, иногда коллекторные двигатели переменного тока.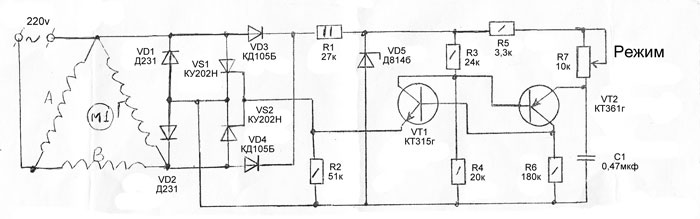
Синхронные двигатели широко используются в промышленных установках средней и большой мощности, не требующих регулирования скорости вращения. Хотя принципиально имеется возможность регулирования скорости вращения синхронных электродвигателей изменением частоты, однако, как правило, синхронные двигатели должны быть отнесены к числу нерегулируемых.
Наибольшее применение получили следующие способы регулирования скорости вращения асинхронного двигателя:
а) введением сопротивления в цепь ротора;
б) изменением числа пар полюсов;
в) изменением частоты питающего напряжения;
г) каскадным включением асинхронного двигателя с другими машинами или вентильными преобразователями.
Для целей регулирования скорости, кроме упомянутых, могут быть использованы некоторые специальные способы включения электрических двигателей: импульсное регулирование, регулирование с помощью дросселей насыщения и другие.
5.1. Регулирование скорости вращения асинхронного двигателя ведением сопротивления в цепь ротора.
Введение сопротивления в цепь ротора (реостатное регулирование) позволяет, как и у двигателей постоянного тока, регулировать скорость вращения двигателя. Плавность регулирования зависит от числа ступеней включаемого сопротивления. Регулирование осуществляется вниз от основной скорости, причём лучшее использование двигателя достигается при регулировании с постоянным моментом. Диапазон регулирования непостоянен и зависит от нагрузки. Жёсткость характеристик значительно уменьшается по мере снижения скорости, что ограничивает диапазон регулирования до (2÷3)
Более благоприятным в отношении потерь энергии является реостатное регулирование скорости при вентиляторном моменте нагрузки, когда подводимая мощность значительно уменьшается по мере снижения скорости. Поэтому такой способ регулирования находит более широкое применение в приводах с вентиляторным моментом нагрузки, а также в механизмах с повторно-кратковременным режимом работы, как, например, в крановых устройствах.
5.2. Регулирование скорости вращения асинхронного двигателя изменением числа полюсов.
Синхронная угловая скорость асинхронного электродвигателя зависит от частоты f1 питающего напряжения и от числа пар полюсов статора p:
или синхронная скорость вращения
, об/мин.
Поэтому числом пар полюсов можно регулировать скорость вращения двигателя.
У двигателей с переключением числа полюсов обмотка каждой фазы состоит обычно из двух одинаковых частей, в одной из которых изменяется направление тока путём переключения этих частей с последовательного на параллельное соединение. Такое переключение (рис. 7.1) приводит к уменьшению числа полюсов вдвое и, следовательно, к увеличению вдвое синхронной скорости машины.
Рисунок.5.1. Схема переключения обмоток статора с последовательного на параллельное соединение.
Практически присоединение обмоток производится переключением обмотки статора по схеме, приведённой на рисунке 7. 2, где осуществлён переход от одиночной звезды к двойной, или по схеме, где произведено переключение с треугольника на двойную звезду.
2, где осуществлён переход от одиночной звезды к двойной, или по схеме, где произведено переключение с треугольника на двойную звезду.
Кроме двухскоростных двигателей, применяются трёхскоростные двигатели, имеющие дополнительно ещё одну не переключаемую обмотку, а также четырёхскоростные двигатели, в статоре которых обычно закладывается две независимые обмотки на разные числа полюсов, каждая из которых переключается по одной из указанных выше схем.
Двигатели с переключением полюсов выполняют с короткозамкнутым ротором.
Регулирование скорости вращения переключением полюсов является не плавным, а ступенчатым. Вместе с тем рассматриваемый способ регулирования является весьма экономичным и отличается механическими характеристиками, обладающие большой жёсткостью.
Благодаря своим преимуществам двигатели с переключением полюсов находят широкое применение там, где не требуется плавного регулирования скорости, например в некоторых металлорежущих станках в целях уменьшения количества механических передач.
Рисунок 5.2.Схемы переключения обмоток статора на двойную звезду.
Импульсное регулирование скорости вращения асинхронного электродвигателя
Стремление к созданию экономичного, надежного и относительно простого электропривода с широким диапазоном регулирования скорости при отсутствии современной базы электроники привели к разработке импульсного метода регулирования скорости. Сущность данного метода заключается в том, что момент электрической машины периодически изменяется до некоторого значения, превышающее значение статического момента с последующим переходом к значению момента меньше статического. В результате таких манипуляций при установившемся движении среднее значение момента электродвигателя будет равно статическому моменту рабочей машины.
Естественно, что периодическое изменение момента будет приводить к изменению скорости электрической машины в известных пределах.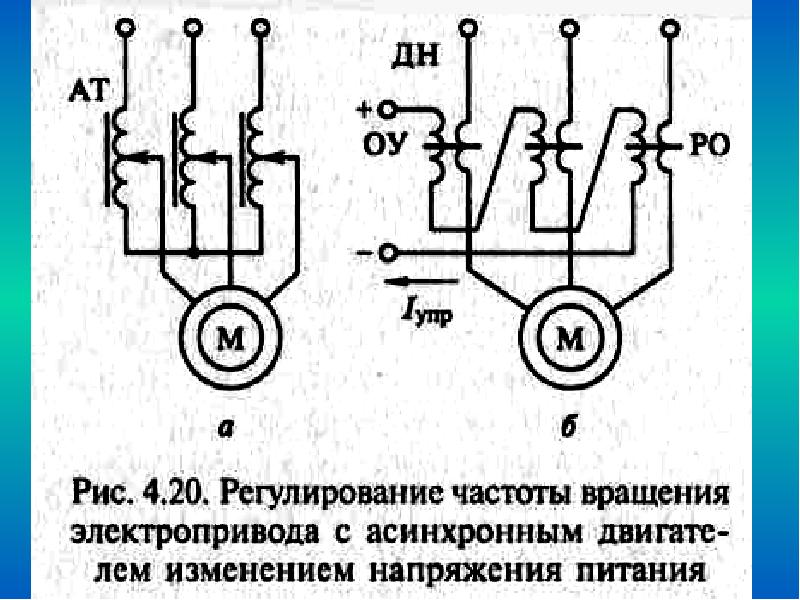 При этом средняя скорость поддерживается на заданном уровне. Колебания значения момента достигается путем периодического изменения параметров статорной цепи. Получение требуемого значения средней скорости электродвигателя достигается путем изменения соотношения длительности работы машины с различными параметрами за время полного цикла. Импульсное управление осуществляется с помощью быстродействующих реле, контакторов, электромагнитных вибраторов или с помощью полупроводниковых приборов.
При этом средняя скорость поддерживается на заданном уровне. Колебания значения момента достигается путем периодического изменения параметров статорной цепи. Получение требуемого значения средней скорости электродвигателя достигается путем изменения соотношения длительности работы машины с различными параметрами за время полного цикла. Импульсное управление осуществляется с помощью быстродействующих реле, контакторов, электромагнитных вибраторов или с помощью полупроводниковых приборов.
Типичные схемы подключения электродвигателя к источнику питания показаны ниже:
Из схем видно, что часть цикла электродвигатель подключен непосредственно к источнику питания, другую же часть оказывается подключенным либо через сопротивление (рисунок а)), либо отключен вовсе (рисунок б)), либо же переводится в режим противовключения (рисунок в)). Длительность периода (цикла) tц будет складываться с времени работы с добавочным сопротивлением или отключенного состояния t2 и времени, при котором электродвигатель подключен к источнику питания t1:
В первую часть цикла t1 момент электрической машины больше статического момента и происходит разгон машины до определенной скорости ω1. Во вторую часть цикла происходит замедление двигателя от скорости ω1 до ω2.
Во вторую часть цикла происходит замедление двигателя от скорости ω1 до ω2.
Величиной, характеризующей импульсную работу, является относительная длительность непосредственного подключения машины к источнику энергии, под которым понимают отношение:
Предполагая, что электродвигатель работает на линейной части механической характеристики, возрастание скорости в первую часть периода и падение во вторую будет происходить по соответствующим экспоненциальным законам. При установившемся процессе скорость в начале периода и в его конце будет одинакова и равна ω2. Процесс колебания скорости относительно среднего значения аналогичен процессу колебания температуры электрической машины, работающей в повторно-кратковременном режиме.
На рисунке ниже показаны колебания скорости относительно ее среднего значения при одинаковых значениях статического момента и длительности цикла, но при различной относительной длительности включения:
При больших значениях электромеханической постоянной привода В по сравнению с длительностью цикла кривизна экспоненциальных участков изменения скорости будет невелика, что позволит заменить их прямыми участками с приемлемой погрешностью. Среднее значение скорости при установившемся значении примерно будет равно:
Среднее значение скорости при установившемся значении примерно будет равно:
При установившейся работе среднее значение момента электродвигателя за полный цикл должно быть равно статическому, то есть Мс = Мср.
Если асинхронная машина в первый момент первого отрезка времени развивает момент М1, а в начале второго М2, то средний момент электродвигателя за весь цикл с небольшой погрешностью может быть принят равным:
Предположив, что М1 = М2 + (М1 – М2) = М2 +ΔМ и подставив значение момента в выражение (2), получим:
Выражение (3) дает возможность по известным зависимостям М1 = f(ω) и М2 = f(ω) построить механические характеристики машины при импульсном управлении для требуемых значений ε.
При любой скорости значение среднего момента равно:
На рисунке ниже построены механические характеристики асинхронной машины при импульсном регулировании по схеме а) для различных значений ε:
Механические характеристики асинхронной машины работающей по схеме б) показаны на рисунке ниже:
Не сложно построить характеристику и для характеристики в) используя приведенную методику. Механические характеристики асинхронной машины для случая импульсного регулирования путем перевода машины с двигательного в тормозной режимы показаны ниже:
Механические характеристики асинхронной машины для случая импульсного регулирования путем перевода машины с двигательного в тормозной режимы показаны ниже:
При заданных моментах М1 и М2 и известной зависимости Мс = f(ω), используя выражение (4), можно определить необходимое значение относительного времени включения контактов ε для обеспечения требуемой средней скорости электропривода:
На рисунке ниже показаны механические характеристики для М1, М2 и зависимость Мс = f(ω):
Рассмотрев приведенные выше механические характеристики мы видим, что по своему виду они похожи на механические характеристики асинхронной машины при регулировании скорости путем изменения напряжения питающей сети.
Характеристики не могут обеспечить более или менее значительный диапазон регулирования скорости и, кроме того, они обладают большой крутизной. Процесс поддержания постоянства средней скорости электродвигателя типа АЛ32-4 мощностью в Р = 1 кВт и n = 1420 об/мин на уровне nср = 677 об/мин по результатам обработки осциллограммы приведен на рисунке ниже:
Из рисунка видно, что при поддержании nср = 677 об/мин скорость вращения электродвигателя при работе с 5630 циклов в час колеблется от nмакс = 1015 об/мин до nмин = 339 об/мин. Ток статора за время включения t1 = 0,42 сек и ε = 0,648 меняется от Iмакс = 11,7 А до Iмин = 7,8 А при номинальном токе двигателя Iном = 4,2 А.
Ток статора за время включения t1 = 0,42 сек и ε = 0,648 меняется от Iмакс = 11,7 А до Iмин = 7,8 А при номинальном токе двигателя Iном = 4,2 А.
Для ограничения пределов колебаний значением Δn = 75 – 100 об/мин число циклов в час необходимо довести до 10 000 – 12 000 в час.
Помимо неудовлетворительного характера скорости при импульсном управлении крайне неблагоприятно протекает и процесс нагревания электрической машины.
Наличие современных частотных преобразователей, а также наличие таких недостатков в импульсном управлении как значительные колебания скорости и неблагоприятные условия нагрева машины привели к тому, что на практике данный способ практически нигде уже не применяется.
4.3. Регулирование скорости асинхронного двигателя в каскадных схемах его включения
Регулирование
скорости АД при использовании некоторых
рассмотренных способов сопровождается
выделением в цепи ротора потерь мощности
ΔР2 = Мω0s, что
значительно снижает экономические
показатели асинхронного ЭП.
Первые схемы, в которых полезно использовалась энергия потерь, создавалась путем специального соединения АД с другими электрическими машинами. Поэтому эти схемы получили название каскадных: «В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называют каскадными.
В общем случае каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию потерь в роторе.
Рис. 5.31. Схемы электромеханического (а) и электрического (б) вентильно-машинных каскадов
По способу использования этой энергии различают схемы электромеханического машинно-вентильного каскада и электрического каскада.
В
электромеханическом машинно-вентильном
каскаде (рис. 5.31, а) обмотка ротора АД
2, приводящего в движение рабочую машину
1, подключается к трехфазному
неуправляемому выпрямителю 4, собранному
на полупроводниковых вентилях. К выводам
выпрямителя присоединен якорь
вспомогательной машины 3 постоянного
тока, ЭДС которой Ев м направлена
навстречу ЭДС выпрямителя Ев. АД
2 и машина 3 соединены одним валом..
К выводам
выпрямителя присоединен якорь
вспомогательной машины 3 постоянного
тока, ЭДС которой Ев м направлена
навстречу ЭДС выпрямителя Ев. АД
2 и машина 3 соединены одним валом..
Если пренебречь потерями в схеме, то можно установить, что рабочей машине 1 передается вся электромагнитная мощность Рэм. Действительно, на вал от АД 2 поступает мощность Р2= Мω, от вспомогательной машины 3— мощность РВ М= ΔР2= = Мω0s, в результате суммарная механическая мощность на валу рабочей машины РР М= Р2+ Рв м= Мω + Мω0s= Мω0= Рэм.
В
электрическом каскаде (рис. 5.31,6) в отличие
от электромеханического вспомогательная
машина 3 не имеет механической связи с
АД 2, а соединена одним валом с синхронным
генератором 5, подключенным к сети
переменного тока. За счет этого I, энергия
потерь передается не на вал рабочей
машины 1, а с помощью генератора 5 отдается
в сеть, а рабочей машине передается
только механическая мощность Р2= Мω.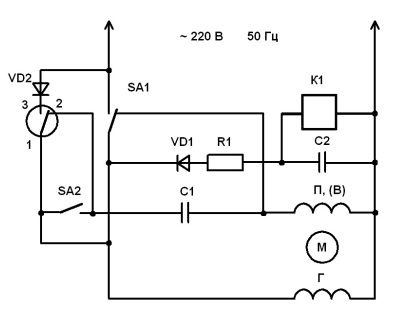
Рассмотрим регулирование скорости в каскадных схемах, которое происходит за счет изменения ЭДС Евмвспомогательной машины 3 за счет воздействия на ток возбужденияIВэтой машины.
Предположим, что при работе ЭП в установившемся режиме происходит увеличение тока возбуждения IВ. Это повлечет за собой увеличение ЭДС Евми вследствие этого уменьшение выпрямленного. токаId, который определяется выражением
Id= (Ев–Ев м)/R∑, (5.35)
где R∑, — суммарное активное сопротивление цепи выпрямленного тока; Ев— ЭДС выпрямителя 4.
Уменьшение Idи тем самым тока ротора АД 2 вызовет
снижение его момента, который станет
меньше момента нагрузки Мс,
создаваемого рабочей машиной 1. В
результате скорость двигателя начнет
снижаться, а его скольжение и ЭДС
роторной обмотки Е2= Е2кsначнут возрастать. Увеличение ЭДС
ротора приведет к увеличению тока ротора
и тем самым момента АД, который вновь
станет равным моменту нагрузки, и
скорость АД перестанет изменяться.
Двигатель опять будет работать в
установившемся режиме, но уже при
более низкой скорости. В случае уменьшения
токаIвскорость АД
будет возрастать.
Увеличение ЭДС
ротора приведет к увеличению тока ротора
и тем самым момента АД, который вновь
станет равным моменту нагрузки, и
скорость АД перестанет изменяться.
Двигатель опять будет работать в
установившемся режиме, но уже при
более низкой скорости. В случае уменьшения
токаIвскорость АД
будет возрастать.
Из механических характеристик электромеханического каскада для разных значений токов Iв(рис. 5.32, а) видно, что максимальный, момент по мере снижения скорости каскада возрастает, поскольку по мере увеличения тока возбуждения вспомогательной машины ее момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при I разных токах возбуждения вспомогательной машины 1 примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности.
Рис. 5.32. Механические характеристики электромеханического (а) и электрического (в) каскадов: 1—4—соответственно при Iв = 0; 0,2; 0,4
При
токе возбуждения вспомогательной
машины, близком к нулю, механическая
характеристика (рис. 5.32, б) электрического
каскада близка к естественной
характеристике АД. По мере увеличения
тока возбуждения искусственные
характеристики 2—4 располагаются ниже
естественной 1, причем номинальному
току возбуждения Iв ном соответствует самая низкая
характеристика. Максимальный момент
каскада, определяемый только АД 2 (см.
рис. 5.31), сохраняется на разных
характеристиках примерно постоянным.
Поэтому электрический каскад называют
каскадом постоянного момента.
5.32, б) электрического
каскада близка к естественной
характеристике АД. По мере увеличения
тока возбуждения искусственные
характеристики 2—4 располагаются ниже
естественной 1, причем номинальному
току возбуждения Iв ном соответствует самая низкая
характеристика. Максимальный момент
каскада, определяемый только АД 2 (см.
рис. 5.31), сохраняется на разных
характеристиках примерно постоянным.
Поэтому электрический каскад называют
каскадом постоянного момента.
В
настоящее время в связи с широким
распространением силовых тиристорных
преобразователей появилась возможность
заменять ими электромашинные
вращающиеся преобразователи. В частности,
электромашинный агрегат 3—5 (см. рис.
5.31,6) представляет собой преобразователь
энергии постоянного тока, поступающей
от выпрямителя 4, в энергию переменного
тока, отдаваемую в сеть. Такой машинный
агрегат может быть заменен на статический
преобразователь «частоты, состоящий
из трансформатора 2 и инвертора 3
(рис. 5:33). К обмотке ротора АД 1 подключен
неуправляемый выпрямитель 5 и инвертор
3, а также реактор 4, который служит для
сглаживания пульсаций выпрямленного
тока. Асинхронный ЭП по схеме рис. 5.33
получил название асинхронного вентильного
каскада.
5:33). К обмотке ротора АД 1 подключен
неуправляемый выпрямитель 5 и инвертор
3, а также реактор 4, который служит для
сглаживания пульсаций выпрямленного
тока. Асинхронный ЭП по схеме рис. 5.33
получил название асинхронного вентильного
каскада.
Инвертор, представляет собой преобразователь энергии постоянного тока в энергию переменного тока. Электродвижущую силу инвертора можно регулировать аналогично тому, как регулируется ЭДС машины постоянного тока. Поэтому механические характеристики асинхронного вентильного каскада аналогичны характеристикам вентильно-машинного электрического каскада.
Рис 5.33. Схема асинхронного винительного каскада
Существует
много схем асинхронных вентильных
каскадов, аналогичных рассмотренной.
Эти схемы несколько отличаются по своей
сложности, техническим возможностям
регулирования скорости, энергетическим
показателям и т. д: Однако принцип
действия и назначение этих схем
аналогичны: использование энергии
скольжения для .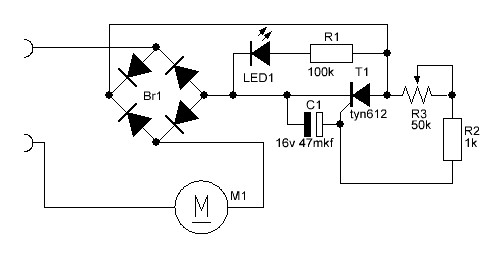 совершения, полезной
работы и возможность плавного
регулирования скорости АД.
совершения, полезной
работы и возможность плавного
регулирования скорости АД.
Отметим основные показатели регулирования скорости АД в каскадных схемах включения.
Практический диапазон регулирования скорости в каскадных схемах обычно не превышает двух. Вызвано это тем обстоятельством, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать установленную мощность всех устройств в его роторной цепи. Так, при диапазоне регулирования. равным двум установленная мощность машинно-вентильного электрического каскада составляет 250% номинальной мощности АД, из них основной АД —100%, выпрямитель, вспомогательная машина и синхронный генератор —по 50%.
Плавность
регулирования скорости АД в каскадных
схемах высокая и определяется плавностью
изменения ЭДС вспомогательной машины
или ПЧ. Регулирование скорости производится
вниз от естественной характеристики,
а некоторые специальные каскадные схемы
обеспечивают и двухзонное регулирование
скорости.
Несмотря на значительные капитальные затраты при реализации данного способа регулирования скорости, применение каскадных схем за счет полезного использования энергии скольжения оказываются экономически целесообразным для мощных асинхронных ЭП с небольшим (не более 2—3) диапазоном регулирования скорости. К ним относятся ЭП мощных вентиляторов, центробежных насосов, компрессоров, воздуходувок, испытательных установок.
Регулятор оборотов своими руками | Подробное описание создания самодельного прибора (120 фото)
В большинстве вращающихся электронных проборов используется коллекторный двигатель. Он позволяет получить необходимый в некоторых случаях высокий пусковой момент. Принцип его работы основан на вращении ротора под воздействием магнитного поля статора, на который подается напряжение.
Для того чтобы получить подходящую скорость вращения без потери мощности необходимо устройство контроля за скоростью вращения. Поэтому в данной статье будет разобрано, как сделать регулятор оборотов двигателя своими руками.
Поэтому в данной статье будет разобрано, как сделать регулятор оборотов двигателя своими руками.
Содержимое обзора:
Сложности и особенности
Сложность создания регулятора оборотов коллекторного двигателя заключается в том, что устройство потребляет не только активную, но и реактивную мощность, которая увеличивается при повышении оборотов. Главной задачей является выравнивание и сокращение разрыва между двумя этими характеристиками.
Мощность коллекторного двигателя это произведение потребляемого им тока, на напряжение сети. Общее ее значение складывается из активной и реактивной.
В домашних условиях довольно тяжело привести к пустые потери к нуля. Для этого необходимо, чтобы прибор испытывал только активную нагрузку, что можно получить, только используя полупроводниковые резисторы.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.
Двигатель
В зависимости от принципа управления и характеристик, существуют различные типы двигателей. Остановиться стоит только на двух, в одном используется обмотка возбуждения, а в другом постоянный магнит. В зависимости от выполняемой работы нужно правильно подобрать тип агрегата.
Если необходимо регулировать частоту вращения от минимального до конкретного значения, например в дрели. То лучше выбирать схему с постоянным магнитом.
То лучше выбирать схему с постоянным магнитом.
В тех же случаях, когда минимальное значение вращения будет равняться 0 оборотов, лучше использовать обмотку возбуждения. Такая схема подойдет для регуляторов оборотов кулера компьютера.
Двигатель конструктивно состоит из следующих узлов:
- Якорь, он же ротор, на котором имеется обмотка.
- Коллектор, который выпрямляет ток.
- Статор, обмоткой которого создается магнитное поле.
Регулятор
Закончив с двигателем и разобравшись с его показателями и режимом работы можно делать регулятор оборотов асинхронного двигателя своими руками.
Необходимо добиться следующих целей:
- Регулировка должна осуществляться от нуля оборотов до максимально возможных значений.
- На низких скоростях крутящий момент должен быть самым высоким.
- Нужно добиться плавного изменения количества оборотов.
Особенности подключения
При подключении проводов и соединении основных узлов между собой следует придерживаться следующим рекомендаций:
- Провода не должны быть слишком длинными. Особенно если речь идет о регуляторе оборотов бесколлекторного двигателя.
- Обмотка не должна быть повреждена.
- Места соединения должны быть надежно запаяны и изолированы друг от друга.
Пошаговая инструкция
Классическая схема синистора работает по принципу зарядки конденсатора через мало ёмкий резистор. После того, как напряжение между обкладками достигнет нужного значения, симистор начинает пропускать ток к нагрузке.
Таким образом, можно контролировать емкость конденсатора, изменяя напряжение, которое пойдет на нагрузку. Для этого отлично подойдет реостат, который устанавливается на место резистора.
К сожалению, такая схема быстро нагревается из-за чего нужно устанавливать дополнительный радиатор позволяющий эффективно отводить тепло.
Более подходящей схемой, позволяющей сохранить потерянную мощность и точнее контролировать работу, является коммутация с силовыми резисторами. Их работа основана многократном открытии и закрытии за один период электрической синусоиды.
Данная установка может осуществлять работу от внутреннего накопителя с напряжением 12 В и внешнего 220 В. Однако в таком случае требуется гасящая схема.
В таком режиме работы можно изменять пороговую мощность, это напрямую влияет на мощность работы ротора. Силовые резисторы выставляются на определенные показания входящего тока, собирая его в нужных объемах.
Фото регулятора оборотов своими руками
Также рекомендуем просмотреть:
Три способа управления однофазным асинхронным двигателем
Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели. Регулирование скорости однофазных асинхронных двигателей желательно в большинстве приложений управления двигателями, поскольку оно не только обеспечивает регулируемую скорость, но также снижает потребление энергии и звуковой шум.
Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении.Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых передач, направление вращения можно изменить. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости. В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Двигатели с постоянным разделенным конденсатором (PSC) — самый популярный тип однофазных асинхронных двигателей. В этой статье будут рассмотрены различные методы и топологии приводов для управления скоростью двигателя PSC в одном и двух направлениях.
Интерфейс микроконтроллера
Микроконтроллер — это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ для управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы. PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
Наличие доступа к специализированным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления.
Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к выключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. Дополнительные каналы АЦП могут использоваться в конечном приложении для считывания различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. Д.
Входы и выходы общего назначения (I / O) могут использоваться для взаимодействия переключает и отображает в приложении.Например, в холодильнике эти универсальные входы / выходы могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. Д. Каналы связи, такие как I2C (TM) или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Интерфейсы неисправностей и диагностики включают в себя входные линии со специальными функциями, такими как возможность отключения ШИМ в случае катастрофических отказов в системе. Например, в посудомоечной машине, если привод заблокирован из-за скопившихся отходов, это может помешать вращению двигателя.Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут регистрироваться и / или отображаться или передаваться на ПК для устранения неисправностей обслуживающего персонала. Часто это предотвращает серьезные отказы и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание.
| Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. |
ШИМ — это основные периферийные устройства, используемые для управления двигателем. Используя указанные выше входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и схему вывода. К наиболее ценным функциям ШИМ относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краям или по центру. Выровненные по центру ШИМ имеют то преимущество, что они уменьшают электромагнитный шум (EMI), излучаемый продуктом.
Вариант № 1: однонаправленное управление
Управление VF в одном направлении упрощает топологию привода и алгоритм управления.Задача состоит в том, чтобы создать переменную
Методы управления скоростью для различных типов двигателей с контролем скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши комплекты двигателей с регулировкой скорости включают двигатель, драйвер (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Блок инвертора», который объединяет трехфазный асинхронный двигатель с небольшой инвертор.В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики.Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и мотор-редукторы с регулятором скорости переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2.Методы регулирования скорости различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Конструкция Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением.Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо регулировать скорость этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот.Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, скольжение s изменяется, а затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например, N1 ~ N3 на рис.5. Чтобы обеспечить надежную работу даже в вышеупомянутом нестабильном диапазоне, необходимо определять скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который снижает ошибку скорости по сравнению с установить значение.
Рис. 4 Частота вращения — крутящий момент асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой.На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, задав время включения / выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на Рис. 7 и Рис. 8. Регулировка скорости осуществляется методом фазового регулирования путем регулирования среднеквадратичного значения значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя переменного тока в виде блок-схемы.
Рис.9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a низкий, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается.Поскольку триггерный сигнал выводится в точке, где треугольная волна b, пересекается с сигналом напряжения a , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует петлю Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет увеличения точности определения скорости.
Рис.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть настроена просто потому, что схема сглаживания не требуется, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна конструкция с длительным сроком службы, поскольку в большом алюминиевом электролитическом конденсаторе нет необходимости.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения — крутящий момент», показанные на рис.12.
Рис. 12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (соединена Y) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагниченный в многополюсной конфигурации, как показано на рис.14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротора.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично таковому у щеточного двигателя постоянного тока.
Рис.15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1. Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается к Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рис. 16 (b), с использованием шести переключающих элементов (полевых транзисторов или IGBT), показанных на рис. 16 (а).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис. 16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис.16 (a), а состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка станет полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет от U-фазы к W-фазе. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, а ротор поворачивается на 30 градусов, переходя к шагу 2.Один оборот ротора выполняется повторением этой операции 12 раз (шаги 1 ~ 12).
На фиг. 17 показана блок-схема конфигурации для управления скоростью бесщеточного двигателя постоянного тока.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения на блок-схеме, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери небольшие.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод управления двигателем, поскольку ток, протекающий через двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, подаваемых при использовании метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2.2.3. Характеристики
Характеристики скорости вращения-момента вращения системы бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, функция защиты водителя от перегрузки активируется, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, и скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ / ВЫКЛ, как показано на рис.21. Время включения / выключения регулируется таким образом, чтобы среднее напряжение, приложенное к двигателю, приобретало форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой волны синусоидального сигнала. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков подразделяется на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц.) Просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Исходя из этого отношения, можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рисунке 23.
Рис.21 Управление V / f
2) Управление с обратной связью
На Рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате, когда применяется нагрузка, выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как поясняется в разделе «Двигатель, регулирующий скорость переменного тока», на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого цикла управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулированием скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998).
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Казуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Лучшая схема управления двигателем переменного тока — Выгодные предложения на схему управления двигателем переменного тока от глобальных продавцов схем управления двигателем переменного тока
Отличные новости !!! Вы находитесь в нужном месте для схемы управления двигателем переменного тока.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку эта лучшая схема управления двигателем переменного тока вскоре станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели схему управления двигателем переменного тока на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в схеме управления двигателем переменного тока и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести ac motor control circuit по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Лучшее управление скоростью для асинхронного двигателя — Отличные предложения по управлению скоростью для асинхронного двигателя от глобального управления скоростью для продавцов асинхронных двигателей
Отличные новости !!! Вы находитесь в нужном месте для регулирования скорости асинхронного двигателя.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот регулятор максимальной скорости для асинхронного двигателя в кратчайшие сроки станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что у вас есть контроль скорости для асинхронного двигателя на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в регулировании скорости для асинхронного двигателя и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, мы думаем, вы согласитесь, что вы получите управление скоростью для асинхронного двигателя по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Лучшая цена на скорость асинхронного двигателя — отличные предложения по скорости асинхронного двигателя от мировых продавцов скорости двигателя с индукционным управлением
Отличные новости !!! Вы находитесь в нужном месте для определения скорости асинхронного двигателя.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, так как этот двигатель с асинхронным регулированием скорости в кратчайшие сроки станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели скорость асинхронного двигателя на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в скорости вращения асинхронного двигателя и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококлассную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести индукционный двигатель с регулируемой скоростью по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Схема простого управления скоростью двигателя постоянного токас использованием таймера IC 555
Цепь УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА в основном представляет собой схему ШИМ (широтно-импульсной модуляции) на базе микросхемы 555, разработанную для получения переменного напряжения по сравнению с постоянным напряжением. Здесь объясняется метод ШИМ.Рассмотрим простую схему, показанную на рисунке ниже.
Если нажать кнопку, если цифра, то мотор начнет вращаться и будет двигаться, пока кнопка не будет нажата. Это нажатие является непрерывным и изображено на первой волне рисунка. Если, например, предположить, что кнопка нажимается на 8 мс и открывается на 2 мс в течение цикла 10 мс, в этом случае двигатель не будет испытывать полное напряжение батареи 9 В, поскольку кнопка нажата только 8 мс, поэтому среднеквадратичное напряжение на клеммах мотор будет около 7В.Из-за этого пониженного среднеквадратичного напряжения двигатель будет вращаться, но с пониженной скоростью. Теперь среднее время включения за период 10 мс = время включения / (время включения + время выключения), это называется рабочим циклом и составляет 80% (8 / (8 + 2)).
Во втором и третьем случаях кнопка нажимается еще меньше времени по сравнению с первым случаем. Из-за этого действующее значение напряжения на клеммах двигателя еще больше снижается. Из-за этого пониженного напряжения скорость двигателя еще больше снижается. Это снижение скорости при непрерывном рабочем цикле происходит до момента, когда напряжение на клеммах двигателя не будет достаточным для вращения двигателя.
Таким образом, мы можем заключить, что ШИМ может использоваться для изменения скорости двигателя.
Прежде чем идти дальше, нам нужно обсудить H-BRIDGE. Теперь эта схема выполняет в основном две функции: первая — для управления двигателем постоянного тока от управляющих сигналов малой мощности, а вторая — для изменения направления вращения двигателя постоянного тока .
Рисунок 1
Рисунок 2
Рисунок 3
Все мы знаем, что для двигателя постоянного тока, чтобы изменить направление вращения, нам нужно изменить полярность напряжения питания двигателя.Поэтому для изменения полярности мы используем H-мост. Теперь на рисунке 1 выше у нас есть четыре переключателя. Как показано на рисунке 2, для вращения двигателя A1 и A2 замкнуты. Из-за этого ток течет через двигатель справа налево, как показано в части 2 и рисунка 3. А пока рассмотрим, как двигатель вращается по часовой стрелке. Теперь, если переключатели A1 и A2 разомкнуты, B1 и B2 замкнуты. Ток через двигатель течет слева направо, как показано в части 1 st рисунка 3. Это направление протекания тока противоположно первому, поэтому мы видим потенциал на клеммах двигателя, противоположный первому, поэтому двигатель вращается против часовой стрелки.Так работает H-BRIDGE. Однако двигатели малой мощности могут приводиться в движение H-BRIDGE IC L293D.
L293D — это H-BRIDGE IC , предназначенный для привода маломощных двигателей постоянного тока и показан на рисунке. Эта ИС состоит из двух h-мостов и поэтому может управлять двумя двигателями постоянного тока. Таким образом, эту ИС можно использовать для управления двигателями робота по сигналам микроконтроллера.
Как обсуждалось ранее, эта ИС имеет возможность изменять направление вращения двигателя постоянного тока. Это достигается за счет управления уровнями напряжения на INPUT1 и INPUT2.
Контакт включения | Входной контакт 1 | Входной контакт 2 | Направление двигателя |
Высокая | Низкая | Высокая | Поверните направо |
Высокая | Высокая | Низкая | Поверните налево |
Высокая | Низкая | Низкая | Остановка |
Высокая | Высокая | Высокая | Остановка |
Итак, как показано на рисунке выше, для вращения по часовой стрелке 2A должно быть высоким, а 1A должно быть низким.Точно так же против часовой стрелки 1A должно быть высоким, а 2A должно быть низким.
Компоненты цепи
- Блок питания + 9В
- Малый двигатель постоянного тока
- 555 Таймер IC
- Резисторы 1К, 100Р
- L293D IC
- 100K -220K пресет или горшок
- IN4148 или IN4047 x 2
- Конденсатор 10 нФ или 22 нФ
- Переключатель
Принципиальная схема
Схема подключена на макетной плате в соответствии с схемой управления скоростью двигателя постоянного тока, показанной выше.Горшок здесь используется для регулировки скорости двигателя. Переключатель предназначен для изменения направления вращения двигателя. Конденсатор здесь не должен быть фиксированной емкости; пользователь может поэкспериментировать с ним, чтобы найти правильный.
Рабочий
При подаче питания таймер 555 генерирует сигнал ШИМ с коэффициентом заполнения, основанным на коэффициенте сопротивления потенциометра. Из-за пары потенциометра и диода здесь конденсатор (который запускает выход) должен заряжаться и разряжаться через другой набор сопротивлений, и из-за этого конденсатору требуется другое время для зарядки и разрядки.Поскольку выходной сигнал будет высоким, когда конденсатор заряжается, и низким, когда конденсатор разряжается, мы получаем разницу в времени высокого и низкого выходного сигнала и, следовательно, ШИМ.
Этот ШИМ таймера подается на сигнальный вывод h-моста L239D для управления двигателем постоянного тока. С изменением коэффициента ШИМ мы получаем переменное среднеквадратичное напряжение на клеммах и, следовательно, скорость. Для изменения направления вращения ко второму сигнальному выводу подключается ШИМ таймера.
.