Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения. - — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Регулирование скорости асинхронного двигателя
Вопрос, связанный с регуляцией скорости вращения электрического низковольтного двигателя , становится все более актуальным. Дело в том, что сокращение или увеличение числа оборотов, совершаемых оборудованием, важно для стабильной работы различных приборов, в частности, для механизмов, которые применяются для облегчения бытовых работ. На первый взгляд может показаться, что проще всего будет решить проблему за счет снижения напряжения, питающего двигатель. Однако, данный вариант подходит только для моделей постоянного тока. В них регуляторы напряжения отличаются лаконичностью конструкции. Кроме того, они вполне доступны. Тем не менее, в последнее время большая часть устройств, принимающих участие в производственном процессе, основываются на двигателях переменного тока асинхронного типа. В подобной ситуации в случае снижения напряжения двигатель начинает резко сокращать число оборотов, утрачивает мощность и тормозит.
В них регуляторы напряжения отличаются лаконичностью конструкции. Кроме того, они вполне доступны. Тем не менее, в последнее время большая часть устройств, принимающих участие в производственном процессе, основываются на двигателях переменного тока асинхронного типа. В подобной ситуации в случае снижения напряжения двигатель начинает резко сокращать число оборотов, утрачивает мощность и тормозит.
Для регулирования скорости вращений существует более современный способ. Он предполагает применения частотных инвенторных преобразователей, которые в обиходе все чаще называются частотниками. Они нередко используются в различных сферах. Например, их часто применяют для оборудования станков и электрических приводов, входящих в состав промышленного оборудования.
Принцип функционирования частотника довольно прост. Его суть заключается в правиле определения вытяжной угловой скорости вращения вала. При этом важно учитывать такой немаловажный фактор, как частота сети, обеспечивающей питание.
Частотный регулятор скорости. Принцип действия регулятора.
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная.
Регуляторы скорости асинхронных двигателей
Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя. Для регулирования оборотов применяют приборы специального типа, частотные схемы вращения двигателя. Такие моторы применяются не только в устройствах вытяжки, но и в быту дома.
Недавно регуляторы скорости вращения электродвигателей асинхронного типа имели в своем составе реле и простые разъединители, которыми производили запуск наибольших оборотах, останавливали привод мотора.
Все регуляторы скорости, как и частотные, служат для того, чтобы менять обороты двигателя. Главная опция регулятора – это изменение мощности системы вытяжки, различного оборудования. Кроме этого, частотные регуляторы имеют и другие функции:
- снижение износа механизма в работе;
- малый расход электроэнергии;
- низкая шумность на большой скорости.
Многие приборы, которые имеют свойство изменения оборотов, применяются как единичные приборы, так и дополнительными блоками для управления приборами в быту с электрическими двигателями.
Способы изменения скорости
Для многих видов двигателей применяют такие варианты регулировки скорости:
- регулирование напряжения питания;
- схемы подключения обмоток моторов с несколькими скоростями;
- частотный метод изменения токовых значений;
- применение коммутатора электронного типа.
Регулятор напряжения позволяет применять простые устройства для мягкой регулировки ступенчатого типа скорости. Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Виды и типы скоростных регуляторов
- применение тиристоров;
- схема с использованием симисторов;
- частотные инверторы;
- трансформаторные типы.
Регуляторы на тиристорах применяются для 1-фазных моторов, кроме изменения скорости, производят защиту механизмов от скачков напряжения и нагрева.
Симисторные регуляторы управляют многими моторами одновременно, если значение мощности не больше максимального. Это самый распространенный способ.
3-фазный регулятор точнее, имеет предохранитель тока, фильтр сглаживания шума на основе конденсатора.
Регулятор частотный для мотора асинхронного типа применяется при изменении напряжения входа в интервале 0-480 вольт, контроль скорости производится изменением электроэнергии. Он применяется в 3-фазных моторах, кондиционерах, вентиляторах с большой мощностью.
Для мощных двигателей применяют регулятор из трансформатора с тремя или с одной фазой. Этим устройством можно регулировать скорость мотора ступенями. Один трансформатор работает со многими моторами в одно время автоматически.
В эксплуатации электромотора кроме шума появляются помехи от электромагнитных волн, которые устраняются кабелем с экраном. Если применять 3-фазный регулятор скорости, то шума не бывает. Нужна установка фильтров сглаживания.
Для применения частотных регуляторов специалисты рекомендуют:
- контролировать соединения проводов и заземления;
- фильтр от помех;
- размещение регулятора в защищенном от солнца месте;
- вертикальное расположение регулятора для лучшего рассеивания тепла;
- не использовать частое выключение и включение для долгого времени службы.
Частотный регулятор скорости РМТ
Эти частотные регуляторы служат для регулировки скорости вращения электродвигателя вентилятора короткозамкнутого асинхронного типа, на 380 вольт. Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Принцип действия преобразователя частоты, или инвертора заключается в следующем. Напряжение питания переменного тока проходит через выпрямитель на диодах, фильтр батареи емкостей значительного размера для уменьшения пульсаций потенциала, получаемого двигателем. Далее, питающее напряжение поступает на сборку из 6-ти транзисторов (биполярных управляемых) с затвором, изолированным от прохождения тока с диодами.
Диоды защищают транзисторы от пробивания потенциала обратной полярности, которое образуется при действии с обмотками мотора. При закрывании и открывании перекрестных транзисторных пар образуются 3 смещенные на 120 градусов графика синуса управляемости обмоток мотора с частотой 25-50 герц.
Подключение регулятора производится зажимами с площадью сечения 6 мм2. Затягивать необходимо усилием 1,2 Н*м для основных контактов, 0,3 Н*м для управляющих контактов.
Частотный регулятор для регулировки скорости вращения асинхронного двигателя
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
Предназначение и функции регуляторов
Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли
Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора. При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
- уменьшение износа оборудования в процессе эксплуатации;
- экономия потребляемой электрической энергии;
- снижение шумов на максимальных оборотах.
Большинство приборов, регулирующих скорость вращения электродвигателя, могут быть использованы как отдельный элемент системы, так и являться дополнением электронного блока управления, бытовым прибором, приводящимся в действие мотором.
Варианты регулировки скорости электродвигателя
Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
- регулировка подачи напряжения;
- переключение обмоток асинхронных многоскоростных двигателей;
- частотная регулировка показателей тока;
- использование электронного коммутатора.
Изменение напряжения
Разновидности моделей, регуляторов оборотов
Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей различаются по принципиальному изменению оборотов вращения:
- регуляторы, собранные на тиристорах;
- симисторные стемы изменения скорости;
- частотные регуляторы;
- регуляторы на основе трансформаторов.

Тиристорные регуляторы скорости используются для однофазных двигателей и позволяют помимо изменения оборотов вращения защищать оборудование от перегрева и перепадов напряжения.
Симисторные устройства могут управлять сразу несколькими электромоторами, работающими как на постоянном, так и переменном токе, но при условии, что параметры мощности не будут превышать предельных значений. Такой способ изменения оборотов один из самых популярных, если необходимо регулировать скорость благодаря изменению показателей напряжения от минимального до номинального значения.
Частотный регулятор скорости для асинхронного двигателя используется при преобразовании входного напряжения в диапазоне от 0 до 480 вольт, а непосредственный контроль оборотов осуществляется благодаря изменению подаваемой электрической энергии.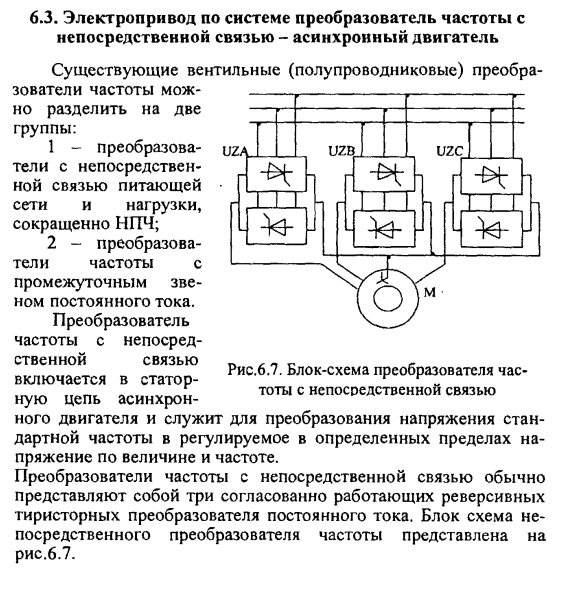 Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Также для мощных электромоторов используют регулятор на основе однофазного или трёхфазного трансформатора. Благодаря такому устройству появляется возможность ступенчатой регулировки скорости двигателей. При этом одним трансформатором можно управлять сразу несколькими устройствами в автоматическом режиме.
Частотные регуляторы асинхронных моторов
Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы, инверторные кондиционеры и частотные преобразователи.
На сегодняшний день, частотные регуляторы – самый распространённый метод регулировки, мощностных характеристик оборотов и уровня производительности большинства механизмов, которые приводятся в действие асинхронным трёхфазным электродвигателем.
При таком методе изменения скоростных показателей в электродвигателе, к нему подключается специальный частотный регулятор. В большинстве случаев это тиристорные преобразователи
Хочется отметить, что во время снижения частотных показателей падает, и перегрузочная способность электродвигателя и поэтому для компенсации мощностных потерь нужно увеличивать напряжение. При этом величина напряжения зависит от конструктивных особенностей привода. Если регулировка выполняется на моторе, работающем с постоянным уровнем нагрузки на валу, то величина напряжения увеличивается пропорционально падению частоты.
В случае, когда частотная регулировка выполняется на электродвигателе постоянной мощности, то увеличение напряжения производится пропорционально корню квадратному падения частоты. При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
Частотные регуляторы скорости для асинхронных электродвигателей – единственно правильный способ изменения оборотов мотора. В первую очередь это обусловлено возможностью изменения скорости в максимально широком диапазоне практически без потери мощности и уменьшения перегрузочных характеристик мотора.
Особенности использования регуляторов скорости
В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.
Также кроме шума во время работы электродвигателя на разных скоростях могут появиться электромагнитные помехи, устранить которые можно за счёт экранированного кабеля. При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации.
- Прежде чем включать устройство в сеть переменного тока важно проверить все соединительные элементы и провода на качество заземления.
- Чтобы устранить различные помехи в сети важно устанавливать специальный фильтр.
- Для недопущения перегрева регулятора оборотов мотора, его размещают в месте, куда не попадает солнце. В противном случае из-за повышения температуры устройство будет работать на предельной нагрузке и может перестать реагировать на показатели датчиков.
- Любой регулятор, в том числе и частотный для асинхронного двигателя должен размещаться вертикально, что позволит качественно рассеивать тепло, выделяемое, в процессе работы прибора.
- Не рекомендовано очень часто производить включение или выключение регуляторов, так как в процессе непрерывной работы они функционируют в оптимальных условиях и поэтому реже выходят из строя.

В настоящее время всё чаще используют частотные регуляторы, так как они имеют компактные размеры и невысокую стоимость по сравнению с трансформаторными аналогами. При этом во время работы такие устройства подают номинальное напряжение на электромотор.
Частотные преобразователи | Регуляторы частоты
Частотный преобразователь используется для плавного регулирования момента и скорости вращения вала электродвигателя. Также частотник снижает пусковые токи, уменьшает потребление электроэнергии (до 60%), обеспечивает плавный пуск и торможение привода, его защиту от перегрузок и перегрева.
Принцип работы
Общий принцип работы частотного преобразователя основан на формировании выходного напряжения с заданными характеристиками. Преобразователь частоты с промежуточным звеном устроен следующим образом. На первом этапе преобразования происходит выпрямление переменного напряжения электросети, уменьшение его пульсации и фильтрация гармоник (гармонических искажений тока). Из выпрямителя постоянный ток поступает в цепи инвертора, где преобразуется в переменное напряжение с изменяемой частотой и амплитудой. В качестве силовых элементов используются IGBT-транзисторы, выполняющие функцию электронных ключей. Управление частотой позволяет регулировать скорость вращения ротора электродвигателя.
Преобразователь частоты с промежуточным звеном устроен следующим образом. На первом этапе преобразования происходит выпрямление переменного напряжения электросети, уменьшение его пульсации и фильтрация гармоник (гармонических искажений тока). Из выпрямителя постоянный ток поступает в цепи инвертора, где преобразуется в переменное напряжение с изменяемой частотой и амплитудой. В качестве силовых элементов используются IGBT-транзисторы, выполняющие функцию электронных ключей. Управление частотой позволяет регулировать скорость вращения ротора электродвигателя.
По способу управления различают скалярные и векторные преобразователи частоты. Скалярные частотники используют широтно-импульсную модуляцию (ШИМ) — распространенный метод управления, суть которого заключается в формировании и подаче выходных импульсов тока заданной частоты и скважности на статорную обмотку электродвигателя. Особенностью скалярного способа является возможность одновременного управления несколькими электродвигателями.
Векторный преобразователь частоты управляет магнитными полями как статора, так и ротора за счет изменения значений напряжения и выходного тока (силы, частоты и фазы). Выпускаются два класса подобных устройств: с обратной связью (с датчиком на валу двигателя) и бездатчиковые. Частотный преобразователь с обратной связью быстро реагирует на изменение нагрузки, сохраняя заданную скорость вращения двигателя. Это наиболее современный тип оборудования. В целом преобразователи частоты с векторным управлением имеют более высокую точность, но, как правило, сложнее в настройке.
Применение
Инверторы частоты используются для управления электроприводами различного оборудования:
- насосы систем водоснабжения (скважинные, глубинные)
- станочное оборудование (токарные, шлифовальные, ленточнопильные станки)
- лифтовое оборудование
- вентиляторы
- компрессоры
- конвейеры, транспортеры, рольганги
- подъемное оборудование (краны, электротельферы)
Как выбрать частотный преобразователь
Существует несколько основных параметров, которыми руководствуются при выборе частотника.
1. Мощность преобразователя частоты должна соответствовать номинальной мощности электродвигателя. Этот принцип верен в случае с обычным асинхронным приводом. Если используется специальный двигатель (синхронный, с тормозом и т. д.), то правильнее ориентироваться на значение номинального тока — у частотника оно должно быть выше, чем у двигателя.
2. Параметры электросети. Большинство современных частотных инверторов рассчитаны на работу в трехфазной сети с напряжением 380В. Также выпускаются однофазные инверторы малой мощности, рассчитанные на напряжение 220-240В. К сожалению, качество электросети не всегда стабильно. Падение напряжения может привести к отключению частотника, резкое повышение выведет его из строя. Чтобы избежать подобных проблем, рекомендуется выбирать ПЧ с широким диапазоном напряжений.
Обратите внимание. Однофазный частотник можно подключить к трехфазному двигателю по схеме «треугольник» (при подключении по схеме «звезда» происходит потеря мощности). Трехфазный частотный преобразователь также может работать в однофазной сети, но в этом случае его выходной ток не должен быть выше 50% от номинального значения.
Трехфазный частотный преобразователь также может работать в однофазной сети, но в этом случае его выходной ток не должен быть выше 50% от номинального значения.
3. Перегрузочная способность. Важный параметр, от которого зависит срок службы инвертора. Подбирайте ПЧ в соответствии с продолжительностью, периодичностью и величиной перегрузок двигателя. Обычно эти данные указываются в руководстве к приводу. Иногда рекомендуют приобретать преобразователь с запасом по мощности и пиковому току до 15%.
4. Диапазон регулирования частот. Практически любой преобразователь частоты обеспечит стабильную работу двигателя, если скорость его вращения не опускается ниже 10% от номинальной. При работе привода на низких оборотах необходимо позаботиться о дополнительном охлаждении, чтобы избежать перегрева. Верхний предел диапазона указывает на то, сможет ли инвертор управлять электродвигателем с высокими номинальными частотами. Наиболее широкий диапазон предлагают векторные частотные преобразователи.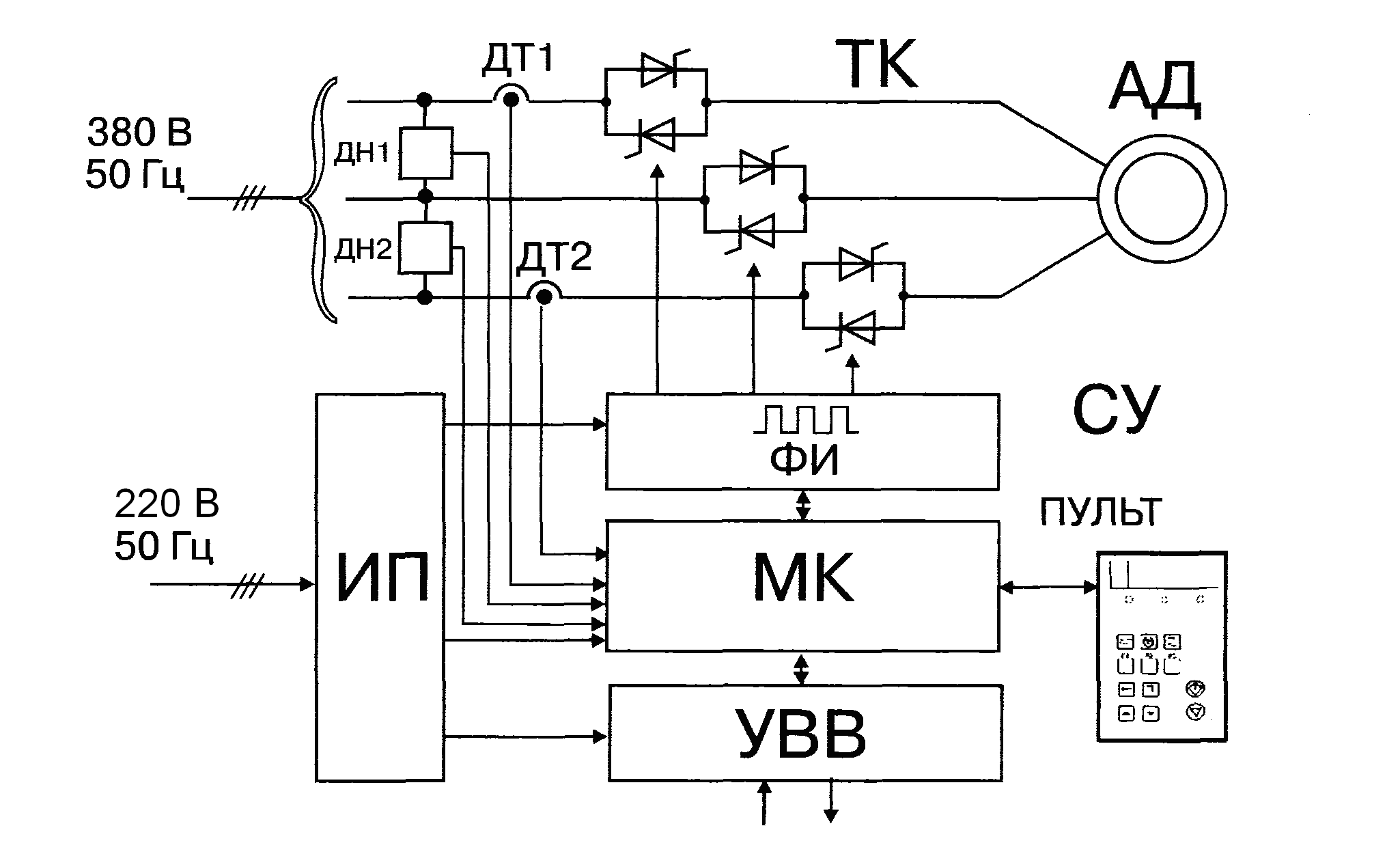
5. Дополнительные опции. Нередко производители стремятся удешевить свою продукцию и предлагают частотники в базовой комплектации. При покупке преобразователя следует заранее позаботиться о защитном оборудовании: сетевом и моторном дросселях, тормозном резисторе и проч.
К прочим характеристикам инверторов, определяющих выбор той или иной модели, относятся: количество цифровых и аналоговых входов/выходов, класс защиты IP, информативность и удобство отображения рабочих параметров (количество строк на дисплее, тип экрана и проч.), уровень защиты двигателя (защита от скачков напряжения в сети, от перегрева, от короткого замыкания и т. д.), климатическое исполнение.
Также рекомендуем ознакомиться с каталогом мотор-редукторов. В ассортименте представлены приводы с червячной, зубчатой, планетарной и волновой передачами.
Дополнительная информация:
Выбор частотного преобразователя
Подключение и настройка преобразователя
Преобразователь частоты для электродвигателя
30. 10.2017
10.2017
Введение
Существует немало технологических операций, нуждающихся в регулировании угловых скоростей приводных валов механизмов. Традиционно эта задача решалась двумя путями:
- применением механических многоскоростных редукторов для ступенчатого регулирования скорости, либо вариаторов для плавного регулирования;
- использованием электродвигателей постоянного тока совместно с регуляторами уровня питающего напряжения.
Регулирование угловой скорости ротора, основанное на изменении передаточного числа механической трансмиссии, характеризуется снижением общего КПД передачи. Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Двигатели постоянного тока представляют собой достаточно сложные и дорогие машины. Наличие коллекторного механизма со щёточным аппаратом, предъявляет повышенные требования к их обслуживанию и снижает надёжность.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Принцип частотного регулирования
В основе частотного регулирования двигателя переменного тока лежит взаимосвязь угловой скорости, с которой вращается поле статора с частотой напряжения питания. Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора. Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
ω0 = 2πf1/р,
где f1 — значение частоты напряжения, питающего обмотку статора, р — количество полюсных пар статорной обмотки.
Из приведенной формулы следует, что совершая изменение значения частоты подводимого к двигателю напряжения, можно плавно изменять значение угловой скорости (частоты) вращающегося поля статора, что приведёт к изменению частоты вращения ротора электродвигателя.
Данный принцип позволяет использовать в регулируемых приводах наиболее технологичные, простые и надёжные асинхронные двигатели, имеющие короткозамкнутый ротор. Благодаря высоким технико-экономическим показателям систем частотного регулирования происходит их активное внедрение в сферу промышленной и бытовой техники.
Устройство преобразователя частоты.
На рисунке 1 показана структурная схема, иллюстрирующая устройство преобразователя частоты (ПЧ).
Рис.1 Преобразователь частоты
Сетевое питающее напряжение промышленной частоты 50 герц поступает на вход выпрямителя (В), представляющего собой обычную мостовую диодную сборку. На выходе выпрямителя установлен Г — образный LC фильтр, выполняющий функции сглаживания пульсаций, которые присутствуют в выпрямленном напряжении.
Основной частью преобразователя является инвертор (И), осуществляющий преобразование постоянного напряжения в трёхфазную систему напряжений синусоидальной формы с регулируемой частотой и амплитудой. Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Примечание. Скважность — это оценочная характеристика периодического импульсного сигнала, рассчитываемая как отношение периода чередования сигнала к длительности импульса. То есть, величина скважности показывает, какую часть периода занимают импульсы. При изменении скважности изменяется соотношение длительностей импульсов и промежутков между ними.
Следует обратить внимание на одну интересную особенность частотных преобразователей. На рисунке 1 показан преобразователь, подключенный к трёхфазной сети. Существуют модели преобразователей, питающихся от однофазной сети, при этом, на выходе инвертора формируется всё та же трёхфазная система. Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Применение частотных преобразователей
Сегодня трудно найти область, где не нашли своего применения частотно-регулируемые приводы асинхронных электродвигателей.
На крупных блочных электрических станциях частотные регуляторы осуществляют регулирование подачи топлива в котлы, гибко адаптируя работу энергоблоков к изменяющемуся режиму работы энергосистемы. В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
Частотное регулирование приводов мощных вентиляторов промышленных систем позволяет автоматически поддерживать оптимальные условия их работы при изменении внутренних и внешних факторов, экономя при этом электрическую энергию и продлевая ресурс оборудования.
Большую финансовую экономию принесло внедрение частотных регуляторов в городские системы водоснабжения. Рабочее давление в водоводах питьевого назначения ранее поддерживалось в основном путём оперирования задвижками. Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Применение частотных регуляторов не обошло стороной и область бытовой электротехники. Все современные стиральные машины и пылесосы оснащены частотным приводом. Это позволило отказаться от редукторов и ремённых приводов и повысить экономичность работы домашних агрегатов.
Регулирование скорости асинхронного двигателя
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
VFD или управление фазой симистора для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом. В этом сообщении в блоге представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2 серии
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью. С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц). При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Частотно-регулируемый привод управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель.Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов.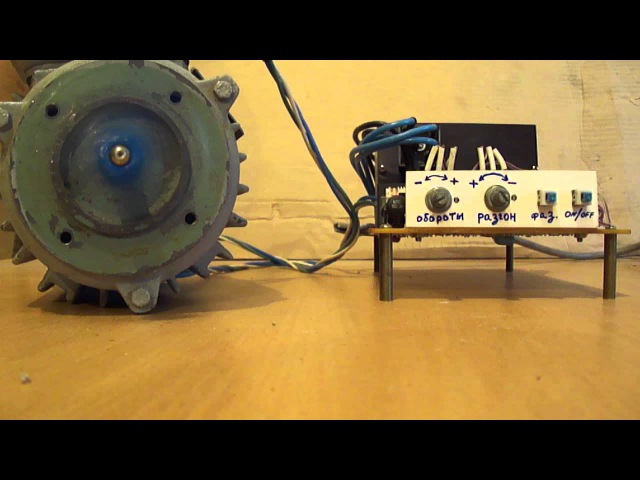 Такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что для него требуется трехфазный асинхронный двигатель переменного тока с продолжительной нагрузкой.Если в двигателе имеется тормозной механизм любого типа, он обычно сокращает рабочий цикл. Я видел однофазные частотно-регулируемые приводы на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Способ управления скоростью однофазных асинхронных двигателей переменного тока
Теперь давайте посмотрим на другой метод управления скоростью. Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости.Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент. Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока.
Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока.
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц. Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно уменьшается при падении напряжения на 10 В.Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет. В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости.Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения). Oriental Motor использует тахогенераторы с нашими двигателями с регулировкой скорости переменного тока, такими как серии DSC или US2. Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией.Вы можете видеть, что мы используем TRIAC для управления напряжением. Также мы используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с частотным приводом. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.
Еще одно преимущество, представленное в серии DSC, — это вертикальная работа.В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет схему управления скоростью думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость.Однако при уменьшении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении позволяет осуществлять контролируемое замедление с автоматическим электромагнитным торможением. |

Недостатком двигателей переменного тока с регулировкой скорости с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента скорости двигателя помечена, чтобы показать это.Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы), пожалуйста, обратитесь к пунктирной линии, обозначенной «Допустимый крутящий момент для комбинированного типа».
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Подпишитесь, пожалуйста, в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низких температурах, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеально подходят бесщеточные двигатели. Для таких применений, как сдвоенные ленточные конвейеры, машины для полировки / удаления заусенцев или перемешивающие машины, слишком сильные колебания скорости из-за нагрузки могут повлиять на конечный продукт. Если постоянный крутящий момент и регулирование скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.
Щелкните ниже, чтобы сравнить 3 доступные технологии управления скоростью. |
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основные сведения о двигателе переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током. Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки.Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма. Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле.Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
ПродуктыAC Motor имеют два варианта управления с обратной связью. Этими вариантами являются либо резольвер двигателя переменного тока, либо энкодер двигателя переменного тока. И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются.
В резольверах двигателей переменного тока используется второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе в воздушном зазоре. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции. Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, пересекающего воздушный зазор между источником света и фотодетектором.Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому они должны быть основным приоритетом для любого приложения. Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные.Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами. Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота.Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается. Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного токаразработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Асинхронные двигатели используются во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиопроигрыватели
— Вентиляторы
Их также можно найти в промышленности:
— насосы
— нагнетатели
— конвейеры
— компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, которое контролирует скорость двигателя переменного тока.Контроллер переменного тока также может называться частотно-регулируемым приводом, преобразователем частоты, преобразователем частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время используются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, можно найти в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% от номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно контролировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции VFD включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (PWM). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, промежуточного звена постоянного тока и инвертора, но конструкция каждого из них варьируется от привода к приводу. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Чтобы поддерживать правильное соотношение напряжения и частоты (Вольт / Герц), напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение на двигателе.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная частота ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогостоящие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Привод с частотно-регулируемым приводом с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенерационный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой крутящий момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов AC Motor, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. Если возможно, смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запуститься, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Двигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри кожуха двигателя, ротор установлен внутри, и между ними имеется зазор, отделяющий их от соприкосновения друг с другом. Кожух представляет собой станину двигателя, содержащую два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
Двигатель
Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным током.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работая за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному отношению x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; Тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с расщепленной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, если двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Требуемое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное тепло.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, каналах ввода / вывода и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений параметров системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленный зажим на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Крепление двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать электродвигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и дополнительной панелью, сконструируйте дополнительную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных IP-адресов. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История двигателя переменного тока
Изобретение двигателя переменного тока Асинхронные двигатели
переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Развитие двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Для получения более подробной информации и дополнительных сведений см. Страницу «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока представляют собой систему 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателей переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются с более крупными асинхронными двигателями переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его упор на исследования и разработки обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными проектными требованиями. Иногда настройка настолько проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Двигатель переменного тока Anaheim Automation
Инженерыценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат благодаря индивидуальной конструкции электродвигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной базой складских запасов, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписывать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, требования к маркировке или защите от вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной торговой марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
Q: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
Q: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
Q: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
Q: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его запуска необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы по двигателям переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если необходимо немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
Q: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
Q: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
В: Почему некоторые редукторы электродвигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
В: Повлияют ли на асинхронный двигатель переменного тока сильные колебания напряжения источника питания?
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться.
Три способа управления однофазным асинхронным двигателем
Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели. Регулирование скорости однофазных асинхронных двигателей желательно в большинстве приложений управления двигателями, поскольку оно не только обеспечивает регулировку скорости, но также снижает потребление энергии и звуковой шум.
Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении.Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых передач, направление вращения можно изменить. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости. В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Двигатели с постоянным разделенным конденсатором (PSC) — самый популярный тип однофазных асинхронных двигателей. В этой статье будут рассмотрены различные методы и топологии приводов для управления скоростью двигателя PSC в одном и двух направлениях.
Интерфейс микроконтроллера
Микроконтроллер — это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ для управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы. PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
Наличие доступа к специализированным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления.
Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к выключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. Дополнительные каналы АЦП могут использоваться в конечном приложении для считывания различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. Д.
Входы и выходы общего назначения (I / Os) могут использоваться для взаимодействия переключает и отображает в приложении.Например, в приложении для холодильника эти универсальные входы / выходы могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. Д. Каналы связи, такие как I2C (TM) или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Интерфейсы неисправностей и диагностики включают в себя входные линии со специальными функциями, такими как возможность отключения ШИМ в случае катастрофических сбоев в системе. Например, в посудомоечной машине, если привод заблокирован из-за скопившихся отходов, это может помешать вращению двигателя.Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут регистрироваться и / или отображаться, или передаваться на ПК для устранения неисправностей обслуживающего персонала. Часто это предотвращает серьезные отказы и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание.
| Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. |
ШИМ — это основные периферийные устройства, используемые для управления двигателем. Используя указанные выше входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и схему вывода. К наиболее ценным функциям PWM относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краям или по центру. Выровненные по центру ШИМ имеют то преимущество, что они уменьшают электромагнитный шум (EMI), излучаемый изделием.
Вариант 1: однонаправленное управление
Управление VF в одном направлении упрощает топологию привода и алгоритм управления.Задача состоит в том, чтобы создать источник питания с переменным напряжением и частотой из источника питания с фиксированным напряжением и частотой (такого как источник питания от настенной розетки). На рисунке на странице 85 показана блок-схема этой топологии привода с тремя основными секциями построения, которые обсуждались ранее. Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, имеющиеся в наличии, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, включенным последовательно с пусковой обмоткой.В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2).
MCU, показанный на блок-схеме, имеет модуль PWM управления мощностью (PCPWM), который способен выводить до трех пар PWM с зоной нечувствительности между парами. Зона нечувствительности важна в приложении управления асинхронным двигателем, чтобы избежать перекрестной проводимости шины постоянного тока через переключатели питания, когда один выключается, а другой включается. Схема диагностики может включать в себя контроль тока двигателя, контроль напряжения на шине постоянного тока и контроль температуры на радиаторе, подключенном к силовым переключателям и двигателю.
| Блок-схема топологии привода с тремя основными секциями здания. В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2). Показанный MCU имеет модуль ШИМ, который способен выводить до трех пар ШИМ с зоной нечувствительности между парами. |
| Двунаправленное управление с помощью H-моста. |
Двунаправленное управление
Большинство двигателей PSC предназначены для работы в одном направлении. Однако во многих приложениях требуется двунаправленное вращение двигателя. Исторически для достижения двунаправленного вращения использовались зубчатые передачи или внешние реле и переключатели. При использовании механических шестерен вал двигателя вращается в одном направлении, а шестерни прямого и обратного хода включаются и выключаются в соответствии с требуемым направлением. С помощью реле и переключателей полярность пусковой обмотки электрически меняется на обратную в зависимости от требуемого направления.
К сожалению, все эти компоненты увеличивают стоимость системы для базового управления включением и выключением в двух направлениях.
В этом разделе мы обсудим два метода двунаправленного управления скоростью для двигателей PSC с использованием привода на основе микроконтроллера. Обсуждаемые здесь топологии привода создают эффективные напряжения, которые приводят в действие главную обмотку и пусковую обмотку с фазовым сдвигом на 90 градусов относительно друг друга. Это позволяет разработчику системы навсегда удалить конденсатор, включенный последовательно с пусковой обмоткой, из схемы, тем самым снижая общую стоимость системы.
Вариант № 2: H-мостовой преобразователь
У этого метода есть удвоитель напряжения на входе; на выходе используется H-мост или двухфазный инвертор (см. рисунок выше). К каждому полумосту подключаются один конец основной и пусковой обмоток; другие концы соединены вместе в нейтральной точке источника переменного тока, которая также служит центральной точкой для удвоителя напряжения.
Для схемы управления требуется четыре ШИМ с двумя дополнительными парами и достаточной зоной нечувствительности между дополнительными выходами.PWM0-PWM1 и PWM2-PWM3 — это пары ШИМ с зоной нечувствительности. Используя ШИМ, шина постоянного тока синтезируется для обеспечения двух синусоидальных напряжений, сдвинутых по фазе на 90 градусов, с различной амплитудой и переменной частотой в соответствии с профилем VF. Если напряжение, приложенное к основной обмотке, отстает от пусковой обмотки на 90 градусов, двигатель вращается в прямом направлении. Чтобы изменить направление вращения, напряжение, подаваемое на главную обмотку, должно опережать напряжение, подаваемое на пусковую обмотку.
| Фазные напряжения при вращении двигателя в прямом и обратном направлении. |
Этот способ управления двигателем типа PSC с помощью H-мостового инвертора имеет следующие недостатки.
Основная и пусковая обмотки имеют разные электрические характеристики. Таким образом, ток, протекающий через каждый переключатель, неуравновешен. Это может привести к преждевременному выходу из строя коммутационных аппаратов в инверторе.
Общая точка обмоток напрямую подключена к нейтрали. Это может увеличить количество коммутационных сигналов, проникающих в основной источник питания, и может увеличить шум, излучаемый в линию.В свою очередь, это может ограничить уровень электромагнитных помех продукта, нарушая определенные цели и нормы проектирования.
Эффективное обрабатываемое постоянное напряжение относительно высокое из-за схемы удвоения входного напряжения.
Наконец, стоимость самой схемы удвоителя напряжения высока из-за двух мощных конденсаторов.
Лучшим решением для минимизации этих проблем было бы использование трехфазного инверторного моста, как обсуждается в следующем разделе.
Вариант № 3: Использование трехфазного инверторного моста
Входная секция заменена на стандартный диодно-мостовой выпрямитель.В выходной секции установлен трехфазный инверторный мост. Основное отличие от предыдущей схемы — способ подключения обмоток двигателя к инвертору. Один конец основной и пусковой обмоток подключены к одному полумосту каждый. Остальные концы связываем вместе и подключаем к третьему полумосту.
| Управление с помощью трехфазного инверторного моста. |
При такой топологии привода управление становится более эффективным.Однако алгоритм управления усложняется. Напряжениями обмоток, Va, Vb и Vc, следует управлять для достижения разности фаз между действующими напряжениями на основной и пусковой обмотках, чтобы иметь фазовый сдвиг на 90 градусов относительно друг друга.
Чтобы иметь одинаковые уровни напряжения и нагрузки на всех устройствах, что улучшает использование устройства и обеспечивает максимально возможное выходное напряжение для заданного напряжения на шине постоянного тока, все три фазных напряжения инвертора поддерживаются на одной и той же амплитуде, как указано в :
| Va | = | Vb | = | Vc |
Эффективное напряжение на основной и пусковой обмотках, как указано по формуле:
Vmain = Va-Vc
Vstart = Vb-Vc
Направление вращения можно легко контролировать с помощью фазового угла Vc по отношению к Va и Vb. .
На рисунках на стр. 87 показаны фазные напряжения Va, Vb и Vc, эффективные напряжения на основной обмотке (Vmain) и пусковой обмотке (Vstart) для прямого и обратного направлений соответственно.
Использование метода управления трехфазным инвертором на компрессоре мощностью 300 Вт дало 30% экономии энергии по сравнению с первыми двумя методами.
| Необходимые ресурсы микроконтроллера | ||||
|---|---|---|---|---|
| Ресурс | Однонаправленный | Двунаправленный H-образный мост | Двунаправленный с трехфазным мостом | Банкноты |
| Память программ | 1.5 Кбайт | 2,0 Кбайт | 2,5 Кбайт | – |
| Память данных | ~ 20 байт | ~ 25 байтов | ~ 25 байт | – |
| ШИМ каналов | 2 канала | 2 канала | 3 канала | Дополняет мертвое время |
| Таймер | 1 | 1 | 1 | 8- или 16-бит |
| Аналого-цифровой преобразователь | 3-4 канала | 3-4 канала | 3-4 канала | Ток двигателя, измерение температуры, потенциометр регулировки скорости |
| Цифровые входы / выходы | от 3 до 4 | от 3 до 4 | от 3 до 4 | Для пользовательских интерфейсов, таких как переключатели и дисплеи |
| Входы неисправностей | 1 или 2 | 1 или 2 | 1 или 2 | Для перегрузки по току / перенапряжения / перегрева и т. Д. |
| Сложность алгоритма управления | Низкий | Средний | Высокая | – |
| Сравнение затрат | ||||
| Однонаправленный | Двунаправленный с H-мостом | Двунаправленный с трехфазным мостом | ||
| Секция входного преобразователя | Low — Однофазный диодный мостовой выпрямитель | High — из-за цепи удвоителя напряжения | Low — Однофазный диодный мостовой выпрямитель | |
| Выходная секция инвертора | Низкий — Два полумоста | Средний — Два полумоста.Силовые выключатели на повышенное напряжение | High — трехфазный инвертор. Использование интегрированных силовых модулей (IPM) лучше, чем дискретных компонентов | |
| Мотор | Medium — Требуется пусковой конденсатор | Low — Пусковой конденсатор снят с мотора | Low — Пусковой конденсатор снят с двигателя | |
| Время разработки | Короткий | Средний | длинный | |
| Общая стоимость | Низкий | Средний | Medium — Эффективный контроль при заданной стоимости | |
Еще одно преимущество использования трехфазного метода управления состоит в том, что та же самая топология приводного оборудования может использоваться для управления трехфазным асинхронным двигателем.В этом сценарии микроконтроллер должен быть перепрограммирован для вывода синусоидального напряжения с фазовым сдвигом на 120 градусов относительно друг друга, что приводит в действие трехфазный асинхронный двигатель. Это сокращает время разработки.
Однофазные асинхронные двигатели очень популярны в бытовой технике, а также в промышленных и бытовых приложениях. PSC — самый популярный тип однофазных асинхронных двигателей. Управление скоростью двигателя имеет много преимуществ, таких как энергоэффективность, снижение слышимого шума и лучший контроль над приложением.В этой статье мы обсудили различные методы управления скоростью, которые можно использовать с двигателем PSC в однонаправленном и двунаправленном режимах. Наилучшие результаты дает управление двигателем PSC с использованием топологии трехфазного инвертора.
| |
| Фазное напряжение при вращении двигателя в прямом и обратном направлениях. |
Различные типы методов управления скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя очень важно в промышленности.Трехфазные асинхронные двигатели — один из наиболее часто используемых типов двигателей в электротехнической промышленности. Поскольку скорость асинхронных двигателей постоянна, скорость этого типа двигателя трудно контролировать. В асинхронных двигателях на регулирование скорости также влияет КПД этого двигателя. Таким образом, для управления этими асинхронными двигателями используются различные методы управления скоростью. Эти методы управления скоростью можно разделить, главным образом, на компоновку двигателя.Ниже приведены два основных типа устройств управления, которые необходимо учитывать при управлении асинхронными двигателями.
- Управление скоростью асинхронного двигателя по отношению к стороне ротора двигателя
- Управление скоростью асинхронного двигателя по отношению к стороне статора двигателя.
Управление скоростью асинхронного двигателя со стороны статора
Управление скоростью асинхронного двигателя с учетом управления со стороны статора также можно подразделить на несколько методов управления скоростью, например.
- Путем изменения напряжения питания двигателя
- Изменение числа полюсов статора двигателя
- Изменение частоты питающей стороны двигателя
Путем изменения напряжения питания двигателя
Момент продукт от трехфазного асинхронного двигателя можно показать по уравнению, показанному ниже.
So и E (индуцированная ЭДС) прямо пропорциональны напряжению питания двигателя. Таким образом, изменяя напряжение питания асинхронного двигателя, вы можете управлять крутящим моментом и скоростью асинхронного двигателя.
Путем изменения частоты питающей стороны двигателя
f = частота питающей стороны двигателя
P = количество полюсов статора в двигателе
Ns = синхронная скорость двигателя
Синхронная скорость асинхронного двигателя зависит от количества полюсов в двигателе со стороны статора и частоты двигателя со стороны питания. Таким образом, изменяя частоту питания двигателя, вы можете управлять скоростью двигателя.Регулирование частоты несколько сложно сравнить с другими методами управления двигателем.
Изменение числа полюсов статора двигателя
f = частота питающей стороны двигателя
P = число полюсов статора в двигателе
Ns = синхронная скорость двигателя
Так как вы можете видеть в этом уравнении, количество полюсов статора в двигателе напрямую зависит от скорости асинхронного двигателя.
Таким образом, изменяя количество полюсов статора, также можно изменить скорость асинхронного двигателя.
Управление скоростью асинхронного двигателя по отношению к ротору двигателя.
Управление скоростью асинхронного двигателя с учетом управления на стороне ротора также можно подразделить на несколько методов управления скоростью, таких как.
- Добавление внешнего сопротивления в цепь на стороне ротора
- Применение каскадного подключения
- Ввод ЭДС в цепь двигателя на стороне ротора
Добавление внешнего сопротивления в цепь на стороне ротора
Трехфазный асинхронный двигатель можно показать уравнением, показанным ниже.
Итак, из этого уравнения мы можем узнать, что
Таким образом, крутящий момент асинхронного двигателя косвенно пропорционален сопротивлению стороны ротора. Добавление внешнего сопротивления в ротор позволяет уменьшить крутящий момент двигателя и увеличить его скорость.
Применение каскадного соединения
В этом каскадном методе управления скоростью асинхронного двигателя два двигателя установлены на одном валу двигателя и работают с одинаковой скоростью.
Один двигатель подключен к трехфазному источнику питания, а другой работает от ЭДС, индуцированной питанием первого двигателя через контактные кольца.
При использовании этого метода для асинхронного двигателя может применяться различная скорость и регулировка скорости.
Ввод ЭДС в цепь на стороне ротора двигателя
В этой индукции, метод управления скоростью двигателя, внешнее напряжение добавляется в цепь ротора двигателя, и частота должна совпадать с частотой скольжения.
Таким образом, введение ЭДС в противофазе ротора увеличивает сопротивление ротора.Таким образом, этот метод можно использовать для управления скоростью асинхронного двигателя.
Надеюсь, что вы сможете получить хорошее представление о методах согласования скорости, применяемых в асинхронном двигателе.
ТРЕХФАЗНЫЙ КОНТРОЛЬ СКОРОСТИ ДВИГАТЕЛЯ
(Последнее обновление: 19 августа 2020 г.) Обзор системы управления скоростью трехфазного асинхронного двигателя:Трехфазная система управления скоростью асинхронного двигателя — Техника управления скоростью обычно важна в системе привода с регулируемой скоростью.Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения. Техника управления скоростью обычно важна в системе привода с регулируемой скоростью. Эта система требует источника переменного напряжения и частоты, получаемого от инвертора трехфазного источника напряжения.
Методы управления скоростью полезны при управлении системой привода скорости. Система требует переменного напряжения и частоты, получаемой от инвертора трехфазного источника напряжения.В статье представлено управление скоростью асинхронного двигателя с питанием от трехфазного инвертора напряжения с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор. Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшей производительностью.
Введение Асинхронные двигателииспользуются в различных промышленных приводах из-за их простой недорогой конструкции двигателя и превосходной надежности.Управление двигателем затруднено из-за высокой сложности двигателя. Были представлены некоторые стратегии управления двигателями. Техника включает ШИМ-контроль скорости. Управление быстро расширяется с развитием силовой электроники. И они добиваются успеха в применении компонентов инвертора, что сделало его все более популярным. В частности, прискорбно, что ШИМ-управление является одним из хорошо известных методов управления высокой сложностью систем асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследуется более двух десятилетий.С самого начала полевого управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, в различных контурах управления схемы FOC использовалось несколько методов из теории линейного управления, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация, и из-за этих линейных характеристик методы не гарантируют подходящую работу машины для всего рабочего диапазона, и они не учитывают изменения параметров установленной нагрузки двигателя.Методы основаны на сложных стратегиях управления, отличающихся от описанных здесь передовых методов управления. Метод осуществляется путем регулировки ширины импульса и скважности импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и теперь это созрело. При использовании метода ШИМ форма выходного сигнала инвертора может быть улучшена для минимизации гармоник и пульсаций выходного крутящего момента. Метод уменьшает конструкцию инвертора для ускорения уровня настройки и увеличения динамического отклика системы.В области электрического движения двигатель очень важен для завершения двигателя с регулируемой скоростью.
Приводы асинхронных двигателейАсинхронный двигатель имеет два типа обмоток: обмотки статора и ротора. Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. На обмотку статора подается трехфазное переменное напряжение со сбалансированным напряжением. Статор индуцировал в роторе магнитный поток в качестве основного трансформатора.Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
.- Контролируя напряжение статора.
- Путем управления напряжением ротора.
- Путем управления частотой.
- Путем управления напряжением и частотой статора.
- Путем управления током статора.
- Путем управления напряжением, током и частотой.
Обороты и крутящий момент, которые мы получаем, контролируя ток и частоту напряжения рабочего цикла, очень важны
Целью данной статьи является управление частотой вращения асинхронного двигателя путем регулирования напряжения статора.Этот метод может быть реализован с использованием метода широтно-синусоидальной модуляции импульса через универсальный мостовой компонент и ПИД-регулятор.
Инвертор / Трехфазный преобразователь постоянного тока в переменныйТрехфазный преобразователь постоянного тока в переменный (инвертор) большой мощности широко используется для преобразователей частоты. Основное правило трехфазного преобразователя постоянного тока в переменный, состоящего из 3 однофазных переключателей, подключенных к одному из трех портов терминала нагрузки.
Инвертор — это схема, которая используется для преобразования источника постоянного напряжения в источник переменного напряжения. Используемые силовые полупроводниковые компоненты могут быть в виде транзисторов SCR и полевых МОП-транзисторов, которые работают как переключатели и преобразователи. 3-х фазный инвертор может быть показан на рисунке ниже
Судя по процессу преобразования, инверторы можно разделить на 3 типа, а именно инверторы
Мостовые инверторы делятся на полуволновые мостовые инверторы и полноволновые мосты.В результате выходное напряжение может быть однофазным или трехфазным.
Принцип работы трехфазного асинхронного двигателя: —Принцип трехфазного асинхронного асинхронного двигателя немного отличается от однофазного. Статор удерживает трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Трехфазные статоры и роторы считаются двумя основными частями трехфазного асинхронного двигателя переменного тока.Когда фаза статора получает питание от трехфазного источника переменного тока, в статоре генерируется ток. Магнитное поле, создаваемое трехфазными токами статора, всегда непрерывно вращается с изменениями тока. Это вращающееся магнитное поле разрезает ротор, и возникающий в нем ток взаимодействует с вращающимся магнитным полем. Таким образом создается магнитный момент, который заставляет ротор вращаться на рисунке. Значит, частота вращения ротора должна быть меньше вращающегося магнитного поля n0. Обратное вращение ротора будет реализовано с помощью сменной 3-фазной ресурсной позиции.
Это направление совпадает с фазным током, а значение скорости пропорционально частоте и обратно пропорционально номеру полярной пары. Вычисленная поминутная скорость вращающегося магнитного поля n0 может быть представлена этим уравнением
no = синхронная частота вращения в об / мин
f = частота источника питания в Гц
А p = количество полюсов двигателя
Скорость вращения магнитного потока статора называется синхронной скоростью. Зависит от числа полюсов двигателя и частоты источника питания.Практическое поле по значению скорости ротора будет меньше синхронной скорости. Асинхронные двигатели также называются асинхронными двигателями, потому что значения скорости ротора отличаются от магнитного потока статора. Скольжение — это разница между скоростью ротора и вращением магнитного потока статора. Значение скольжения варьируется от 1% до примерно 6% скорости магнитного потока статора.
Значение слипа,
Значение частоты вращения ротора,
𝑛 = 𝑛0 (1 — 𝑠) 𝑟𝑝𝑚
n0 = скорость потока статора в об / мин
n = значение частоты вращения ротора в об / мин
с = значение скольжения в о.е.
Источник переменного тока, подаваемый на двигатель через обмотки статора, и магнитный поток статора вращаются в одном направлении с источником питания.
ПИД-регуляторСистемы ПИД-регулирования наиболее широко используются в индустрии систем управления. Успех ПИД-регулятора зависит от его точности определения константы ПИД. В процессе практического определения константы PID основаны на человеческом опыте на основе правил, называемых эмпирическими правилами. Исходя из полученного результата, эта константа PID использовалась для дальнейшего управления. Конечно, у него есть слабые места, потому что эта константа одинакова для каждого значения ошибки, которая возникает, и требует сброса настройки, если есть изменения в параметрах установки в константе ПИД.Чтобы преодолеть это, необходим метод, позволяющий точно определять константу ПИД-регулятора в соответствии с установкой. Производительность ПИД-регулирования можно улучшить. На этом рис. Показан принцип работы ПИД-регулятора.
Общие свойства, используемые при регулировании промежуточной системы, другие включают стабильность, точность, скорость отклика и чувствительность. В действующем пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал — это усиление сигнала ошибки определенными факторами. Коэффициент усиления — это пропорциональная константа системы, которая выражается через Kp.Здесь КП имеет высокую скорость реакции. Интегральное управление выходом всегда изменяется во время отклонений, и скорость, с которой изменяется выход, пропорциональна отклонению, константе, выраженной как Ki, и где Ki имеет высокую чувствительность, например за счет уменьшения ошибки, создаваемой сигналом обратной связи. Чем выше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, и наоборот. Производное управление работает путем изменения отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными контроллерами.Эти константы выражены в Kd, где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки. Ожидается, что благодаря объединению этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Асинхронная машина (беличья клетка)У машины будет две функции: мотор или генератор. Индукционная машина имеет трехфазный асинхронный двигатель, такой как машина с фазным ротором (машина с короткозамкнутым ротором).Функция определяется значением крутящего момента от машины.
- Здесь Машина будет работать как двигатель, когда значение Tm положительное.
- Машина будет работать как генератор, когда значение Tm отрицательное.
Инструментальная стоимость компонента машины измерена в таблице
.Таблица 1. Параметр асинхронного / асинхронного двигателя
| Номинальная мощность, напряжение (линейно-линейное), частота | 746 ВА, 380 В, 50 Гц |
| Сопротивление и индуктивность статора | 0.009961 Ом, 0,000867 H |
| Сопротивление и индуктивность ротора | 0,005837 Ом, 0,000867 Гц |
| Взаимная индуктивность | 0,03039 H |
| Инерция, коэффициент трения, пары полюсов | 0,4, 0,02187, 2 |
Универсальный мост представляет собой универсальный преобразователь напряжения для трехфазной сети.Он содержит 6 переключателей, которые соединены мостом. Универсальный мост может быть силовым компонентом электронных устройств
Значение измерения этого универсального моста может быть описано в таблице 2.
Таблица 2. Значение измерения компонентного блока универсального моста
| Устройства силовой электроники | IGBT / Диоды |
| Количество стрел моста | 3 |
| Снаряженное сопротивление | 1e5 Ом |
| Снапряженная емкость | инф |
| Рон | 1e-3 Ом |
| тс, тт | 1e-6 с, 1e-6 с |
Генератор ширины импульса
Широтно-импульсная модуляция (ШИМ) — это простой способ манипулировать шириной сигнала, выраженной импульсами за период, для получения другого среднего напряжения.Примерами приложений PWM являются модуляция данных для телекоммуникаций, управляющая мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковыми эффектами и усилением, а также для других целей. Самый простой способ генерации ШИМ-сигнала — это сравнение пилообразного сигнала как несущего напряжения с опорным напряжением с использованием схемы компаратора операционного усилителя. Работа этого аналогового компаратора заключается в сравнении пилообразных волн напряжения с эталонными напряжениями. И когда опорное напряжение больше, чем напряжение несущей (пилообразной формы), выход компаратора будет высоким.Когда опорное напряжение меньше, чем напряжение несущей, выход компаратора будет низким. Используя принцип работы этого компаратора, чтобы изменить рабочий цикл выходного сигнала, достаточно изменить опорное напряжение.
Система без обратной связиСистема незамкнутого цикла состоит из 4 основных компонентов. Это универсальный мостовой ШИМ-генератор постоянного тока и Асинхронная машина. В системе без обратной связи у них нет обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания.Система управления с разомкнутым контуром традиционно используется в некоторых асинхронных двигателях. Элемент управления прост, потому что содержит несколько компонентов для реализации
Система с обратной связьюУсовершенствование разомкнутой системы замкнутой системы. Система замкнутого цикла состоит из основного компонента f5. Этими компонентами являются управляемый источник напряжения, блок ПИД-регулятора, универсальный мостовой блок, блок генератора ШИМ и асинхронный двигатель, датчик скорости системы с замкнутым контуром, используемый в качестве сигнала обратной связи для задания уставки.Требуемая ошибка — это разница между фактической скоростью и уставкой оборотов в минуту. ПИД обрабатывает эту ошибку как сигнал управления контролируемым источником напряжения.
Источник управляемого напряжения вырабатывает переменное выходное напряжение постоянного тока в качестве входного сигнала для универсального моста.
Универсальный мост для преобразования постоянного напряжения в переменное от управляемого источника напряжения. Мост генерирует трехфазное напряжение для питания асинхронного двигателя. Скорость асинхронного двигателя определяется величиной трехфазного напряжения и частотой выходного универсального моста.Скорость регулируется, чтобы получить ближайшее значение, основанное на заданной скорости об / мин.
Результаты и обсуждениеЗдесь результаты напряжения фазы напряжения сети тока в линии перечислены вместе со скоростью и результатами крутящего момента асинхронного двигателя на следующем рисунке
Результаты разомкнутой системы
Напряжение на выходе инвертора составляет 380 В переменного тока. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель вырабатывает ток статора 35 А. Ток равен каждой фазе, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1500 об / мин. И ответ системы разомкнутого контура может быть показан из этого рисунка. Реакция разомкнутой системы: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося состояния (ts) = 0,9 с.
Результаты замкнутой системы
Напряжение на выходе инвертора составляет 85 В переменного тока.Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель вырабатывает ток статора 30 А. Ток равен каждой фазе, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1420 об / мин. Реакция замкнутой системы может быть показана на этом рисунке. Ответ системы с обратной связью: время нарастания (tr) = 0,02 с, время задержки (td) = 0,015 с, время пика (tp) = 0.025 с и время установившегося режима (ts) = 0,2 с.
ЗаключениеИз результатов следует, что управление асинхронным двигателем с помощью ПИД-регулятора и универсального моста дает лучший отклик, чем без ПИД-регулирования. В системе с разомкнутым контуром время достижения установившейся скорости составляет 0,9 секунды, в то время как в системе с замкнутым контуром время достижения установившейся скорости составляет 0,2 секунды. Это показывает, что ПИД-регулятор получил более быстрый отклик, чем без регулятора.Можно сделать вывод, что предлагаемая система обладает хорошей способностью управлять скоростью асинхронного двигателя.
Нравится:
Нравится Загрузка …
симистор — регулирование скорости асинхронного двигателя с помощью диммера
Причина, по которой это не сработало, кстати, заключается в том, что в асинхронном двигателе крутящий момент является коэффициентом отношения между напряжением и частотой, а двигатель с короткозамкнутым ротором разработан для определенного отношения. Таким образом, используя диммер, вы изменяете не частоту, а только напряжение, тем самым влияя на это соотношение.Крутящий момент двигателя изменяется пропорционально приложенному напряжению при фиксированной частоте, поэтому, если вы дадите этому двигателю 50% напряжения, он будет развивать только 25% от номинального крутящего момента. Это означает, что скольжение увеличивается, двигатель потребляет больше тока, пытаясь вернуться к нормальной скорости скольжения, но не может, поэтому дополнительный ток просто создает ненужное тепло, пока в конечном итоге двигатель не сгорит.
VFD работает, потому что он ДЕЙСТВИТЕЛЬНО изменяет напряжение И ЧАСТОТУ вместе, поддерживая соотношение В / Гц, ожидаемое двигателем, поэтому он обеспечивает номинальный крутящий момент на любой скорости.
Существуют частотно-регулируемые приводы, предназначенные для использования с однофазными двигателями, но не ВСЕ однофазные двигатели. В отличие от трехфазных асинхронных двигателей, которые в основном построены одинаково, существует множество способов заставить работать однофазные асинхронные двигатели. Это связано с тем, что с однофазным двигателем не создается вращающееся магнитное поле, заставляющее двигатель вращаться, он просто вращается взад и вперед. Однако как только двигатель НАЧИНАЕТ вращаться, он продолжает вращаться. Таким образом, однофазные двигатели должны быть спроектированы с использованием некоторого «трюка» для запуска этого вращения, обычно в форме временного фазового сдвига.Двигатели, которые используют отдельную обмотку (Split Phase) или конденсатор (Cap Start) для создания этого фазового сдвига, но затем используют центробежный переключатель, чтобы удалить его, когда двигатель вращается, нельзя использовать с какой-либо формой управления скоростью, потому что они замедляют их. посевной повторно включает метод запуска, и он не был разработан для постоянного использования в цепи. Однако есть две формы однофазного асинхронного двигателя, которые могут использоваться с регулированием скорости: постоянный разделенный конденсатор (поскольку колпачки предназначены для постоянного присутствия в цепи) и двигатель с экранированными полюсами.Двигатели с экранированными полюсами особенно хорошо подходят для простого управления напряжением с помощью «диммера», потому что крутящий момент в любом случае низкий, поэтому они обычно используются только в приложениях, которые не требуют большого крутящего момента, например, в небольших вентиляторах. Двигатели PSC также могут использоваться с диммерами, но проблема крутящего момента все еще существует, поэтому он очень зависит от нагрузки.
В итоге, если у вас асинхронный двигатель, но не с экранированным полюсом или PSC, вы не можете использовать на нем какие-либо формы управления скоростью.
Регулятор скорости асинхронного двигателя PSC
Я сделал это так —
Сторона постоянного тока:
(1) Малина 3, 3V3 GPIO
(2) транзистор 2N222, с резистором 220 Ом на затворе
(3) Твердотельное реле SSR 40 — DA
Сторона переменного тока:
(4) Двигатель PSC, 1 фаз, 0,35 А, 1,5 мФ
(5) индуктор с двойной дроссельной катушкой 2x 10 мГн
(6) Впуск с линейным фильтром 250 В перем. Тока, 10 А Шасси FBNAB2470ZG110
(1) Raspberry подает сигнал 3V3 на транзистор на затворе (подключение через резистор) Это открывает путь к сигналу 5 В от Raspberry к SRR обратно к контакту заземления Raspberry.
(2) Причина использования транзистора заключается в том, что сигнал 3V3 не дает достаточного тока для SSR. SSR запускается током 7,5 мА при 12 В. (http://www.fotek.com.hk/solid/SSR-1.htm)
(3) Когда SSR получал ток 5 В, он пропускал к двигателю ток 230 В.
(4) Теперь: когда мы позволяем мощности подпрыгивать вверх и вниз, двигатель начинает получать большие импульсы, что в принципе вредно как для вашего двигателя, так и для системы питания.
(5) Чтобы этого избежать, вы подключаете в линию дроссельную катушку — для выравнивания напряжения — больше: лучше.Катушки ручной работы тоже подойдут. Статор от другого двигателя работает отлично (фото).
(6) Аналогичным образом помогает линейный фильтр. Вы можете купить один или с помощью простого конденсатора [схема] соединить L и N.
Будьте осторожны и получайте удовольствие!
#! / Usr / bin / env питон
# - * - кодировка: utf-8 - * -
время импорта
импортировать RPi.GPIO как GPIO
пытаться:
в то время как True:
# Использовать ссылки BCM GPIO
# вместо физических номеров контактов
GPIO.setmode (GPIO.BCM)
# Определить GPIO для использования на Pi
GPIO_RELAY_1 = 12
# Установить контакты как выход и вход
GPIO.setup (GPIO_RELAY_1, GPIO.OUT) # RELAY_1
# Установите для триггера значение False (Low)
GPIO.output (GPIO_RELAY_1, ложь)
# Разрешить модулю урегулировать
time.sleep (0,1)
# Отправить импульс 10us для запуска
GPIO.output (GPIO_RELAY_1, True)
распечатать "RELAY_1 ON"
time.sleep (0,5)
GPIO.output (GPIO_RELAY_1, ложь)
распечатать "RELAY_1 OFF"
время.сон (0,2)
# Сбросить настройки GPIO
GPIO.cleanup ()
кроме KeyboardInterrupt:
проходить
GPIO.output (GPIO_RELAY_1, ложь)
напечатать "Finito: Off"
GPIO.cleanup ()
https://sourceforge.net/p/raspberry-gpio-python/wiki/PWM/
время импорта
импортировать RPi.GPIO как GPIO
GPIO.setmode (GPIO.BCM)
GPIO.setup (12, GPIO.OUT)
частота = 500
dc_low = 40
dc_mid = 75
dc_high = 100 p = GPIO.PWM (12, частота) # GPIO.PWM (канал, частота (в Гц)
p.start (0) пытаться:
а 1:
печать "частота =", частота
#dc_low
п.ChangeDutyCycle (dc_low)
печать "dc_low =", dc_low
время сна (120) #dc_mid
p.ChangeDutyCycle (dc_mid)
печать "dc_mid =", dc_mid
время сна (120) p.ChangeDutyCycle (dc_mid)
печать "dc_high =", dc_high
время сна (120)
"" "
для постоянного тока в диапазоне (0, 101, 5):
p.ChangeDutyCycle (dc)
time.sleep (0,1)
print "dc in range (0, 101, 5) =", dc
print "freqnecy =", частота для постоянного тока в диапазоне (100, -1, -5):
п.