FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.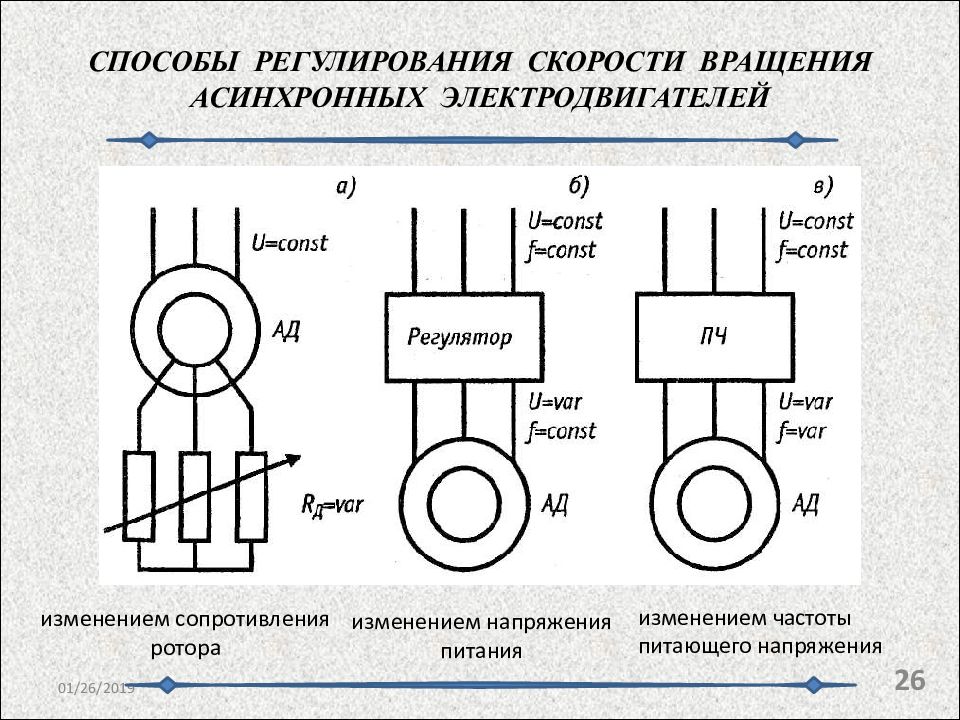
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.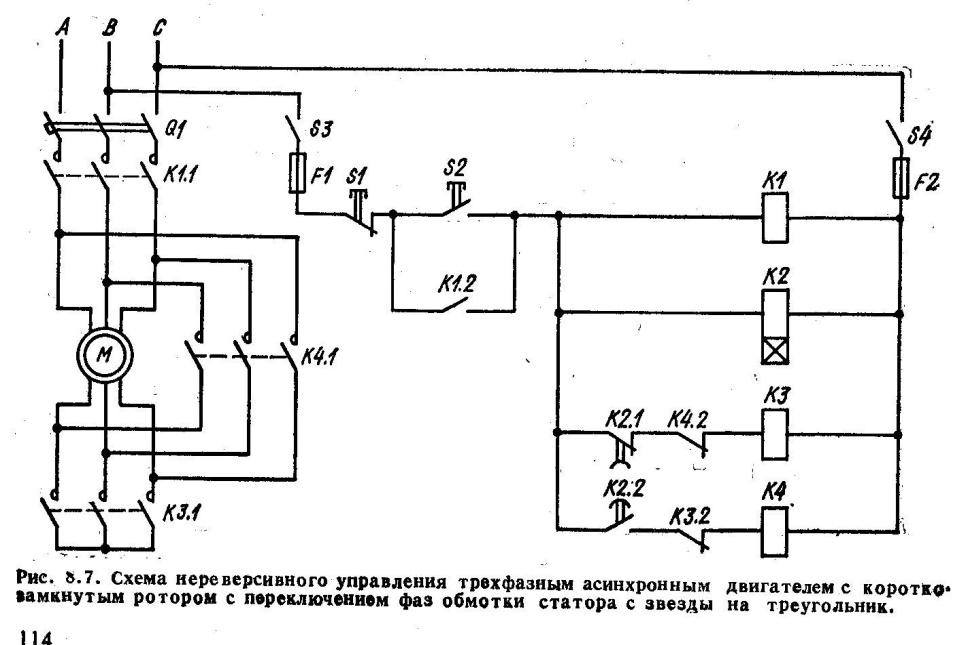 Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.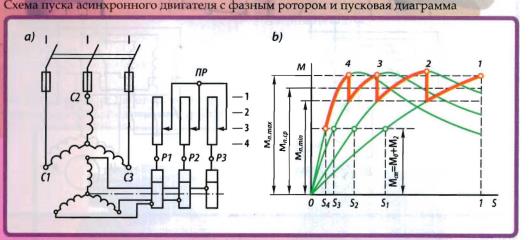
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).

Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Расчет номинального тока электродвигателя | Заметки электрика
Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Решил написать статью о расчете номинального тока для трехфазного электродвигателя.
Этот вопрос является актуальным и кажется на первый взгляд не таким и сложным, но почему-то в расчетах зачастую возникают ошибки.
В качестве примера для расчета я возьму трехфазный асинхронный двигатель АИР71А4 мощностью 0,55 (кВт).
Вот его внешний вид и бирка с техническими данными.
Если двигатель Вы планируете подключать в трехфазную сеть 380 (В), то значит его обмотки нужно соединить по схеме «звезда», т.е. на клеммнике необходимо соединить выводы V2, U2 и W2 между собой с помощью специальных перемычек.
При подключении этого двигателя в трехфазную сеть напряжением 220 (В) его обмотки необходимо соединить треугольником, т.е. установить три перемычки: U1-W2, V1-U2 и W1-V2.
Если же Вы решите подключить этот двигатель в однофазную сеть 220 (В), то его обмотки также должны быть соединены треугольником.
Для информации: почитайте подробную статью о схемах соединения обмоток в «звезду» и «треугольник».
Для правильного выбора автоматического выключателя (или предохранителей) и тепловых реле для защиты двигателя, а также для выбора контактора для его управления, в первую очередь нам нужно знать номинальный ток двигателя для конкретной схемы соединения обмоток.
Обычно, номинальные токи указаны прямо на бирке, поэтому можно смело ориентироваться на них. Но иногда циферки не видны или стерты, а известна только лишь мощность двигателя или другие его параметры.
Такое очень часто встречается, но еще чаще бирка вообще отсутствует или так затерта, что на ней абсолютно ничего не видно — приходится только догадываться, что там изображено.
Но это отдельный случай и что делать в таких ситуациях, я расскажу Вам в ближайшее время.
В данной же статье я хочу акцентировать Ваше внимание на формулу по расчету тока двигателя, потому что даже не все «специалисты» ее знают, хотя может и знают, но не хотят вспомнить основы электротехники.
Итак, приступим.
Внимание! Мощность на шильдике двигателя указывается не электрическая, а механическая, т.е. полезная механическая мощность на валу двигателя. Об этом отчетливо говорится в действующем ГОСТ Р 52776-2007, п.5.5.3:
Полезную механическую мощность обозначают, как Р2.
Чаще всего мощность двигателя указывают не в ваттах (Вт), а в киловаттах (кВт). Для тех кто забыл, читайте статью о том, как перевести ватты в киловатты и наоборот.
Еще реже, на бирке указывают мощность в лошадиных силах (л.с.), но такого я ни разу еще не встречал на своей практике. Для информации: 1 (л.с.) = 745,7 (Ватт).
Но нас интересует именно электрическая мощность, т.е. мощность, потребляемая двигателем из сети. Активная электрическая мощность обозначается, как Р1 и она всегда будет больше механической мощности Р2, т.к. в ней учтены все потери двигателя.
1. Механические потери (Рмех.)
К механическим потерям относятся трение в подшипниках и вентиляция. Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
У асинхронных трехфазных двигателей с фазным ротором еще учитываются потери между щетками и контактными кольцами. Более подробно об устройстве асинхронных двигателей Вы можете почитать здесь.
2. Магнитные потери (Рмагн.)
Магнитные потери возникают в «железе» магнитопровода. К ним относятся потери на гистерезис и вихревые токи при перемагничивании сердечника.
Величина магнитных потерь в статоре зависит от частоты перемагничивания его сердечника. Частота всегда постоянная и составляет 50 (Гц).
Магнитные потери в роторе зависят от частоты перемагничивания ротора. Эта частота составляет 2-4 (Гц) и напрямую зависит от величины скольжения двигателя. Но магнитные потери в роторе имеют малую величину, поэтому в расчетах чаще всего не учитываются.
3. Электрические потери в статорной обмотке (Рэ1)
Электрические потери в обмотке статора вызваны их нагревом от проходящих по ним токам. Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
4. Электрические потери в роторе (Рэ2)
Электрические потери в роторе аналогичны потерям в статорной обмотке.
5. Прочие добавочные потери (Рдоб.)
К добавочным потерям можно отнести высшие гармоники магнитодвижущей силы, пульсацию магнитной индукции в зубцах и прочее. Эти потери очень трудно учесть, поэтому их принимают обычно, как 0,5% от потребляемой активной мощности Р1.
Все Вы знаете, что в двигателе электрическая энергия преобразуется в механическую. Если объяснить чуть подробнее, то при подведенной к двигателю электрической активной мощности Р1, некоторая ее часть затрачивается на электрические потери в обмотке статора и магнитные потери в магнитопроводе. Затем остаточная электромагнитная мощность передается на ротор, где она расходуется на электрические потери в роторе и преобразуется в механическую мощность. Часть механической мощности уменьшается за счет механических и добавочных потерь. В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
Все эти потери и заложены в единственный параметр — коэффициент полезного действия (КПД) двигателя, который обозначается символом «η» и определяется по формуле:
η = Р2/Р1
Кстати, КПД примерно равен 0,75-0,88 для двигателей мощностью до 10 (кВт) и 0,9-0,94 для двигателей свыше 10 (кВт).
Еще раз обратимся к данным, рассматриваемого в этой статье двигателя АИР71А4.
На его шильдике указаны следующие данные:
- тип двигателя АИР71А4
- заводской номер № ХХХХХ
- род тока — переменный
- количество фаз — трехфазный
- частота питающей сети 50 (Гц)
- схема соединения обмоток ∆/Y
- номинальное напряжение 220/380 (В)
- номинальный ток при треугольнике 2,7 (А) / при звезде 1,6 (А)
- номинальная полезная мощность на валу Р2 = 0,55 (кВт) = 550 (Вт)
- частота вращения 1360 (об/мин)
- КПД 75% (η = 0,75)
- коэффициент мощности cosφ = 0,71
- режим работы S1
- класс изоляции F
- класс защиты IP54
- название предприятия и страны изготовителя
- год выпуска 2007
Расчет номинального тока электродвигателя
В первую очередь необходимо найти электрическую активную потребляемую мощность Р1 из сети по формуле:
Р1 = Р2/η = 550/0,75 = 733,33 (Вт)
Величины мощностей подставляются в формулы в ваттах, а напряжение — в вольтах. КПД (η) и коэффициент мощности (cosφ) — являются безразмерными величинами.
Но этого не достаточно, потому что мы не учли коэффициент мощности (cosφ), а ведь двигатель — это активно-индуктивная нагрузка, поэтому для определения полной потребляемой мощности двигателя из сети воспользуемся формулой:
S = P1/cosφ = 733,33/0,71 = 1032,85 (ВА)
Найдем номинальный ток двигателя при соединении обмоток в звезду:
Iном = S/(1,73·U) = 1032,85/(1,73·380) = 1,57 (А)
Найдем номинальный ток двигателя при соединении обмоток в треугольник:
Iном = S/(1,73·U) = 1032,85/(1,73·220) = 2,71 (А)
Как видите, получившиеся значения равны токам, указанным на бирке двигателя.
Для упрощения, выше приведенные формулы можно объединить в одну общую. В итоге получится:
Iном = P2/(1,73·U·cosφ·η)
Поэтому, чтобы определить номинальный ток двигателя, необходимо в данную формулу подставлять механическую мощность Р2, взятую с бирки, с учетом КПД и коэффициента мощности (cosφ), которые указаны на той же бирке или в паспорте на электродвигатель.
Перепроверим формулу.
Ток двигателя при соединении обмоток в звезду:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·380·0,71·0,75) = 1,57 (А)
Ток двигателя при соединении обмоток в треугольник:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·220·0,71·0,75) = 2,71 (А)
Надеюсь, что все понятно.
Примеры
Решил привести еще несколько примеров с разными типами двигателей и мощностями. Рассчитаем их номинальные токи и сравним с токами, указанными на их бирках.
1. Асинхронный двигатель 2АИ80А2ПА мощностью 1,5 (кВт)
Как видите, этот двигатель можно подключить только в трехфазную сеть напряжением 380 (В), т.к. его обмотки собраны в звезду внутри двигателя, а в клеммник выведено всего три конца, поэтому:
Iном = P2/(1,73·U·cosφ·η) = 1500/(1,73·380·0,85·0,82) = 3,27 (А)
Полученный ток 3,27 (А) соответствует номинальному току 3,26 (А), указанному на бирке.
2. Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Данный двигатель можно подключать в трехфазную сеть напряжением, как на 380 (В) звездой, так и на 220 (В) треугольником, т.к. в клеммник у него выведено 6 концов:
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·380·0,83·0,83) = 6,62 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·220·0,83·0,83) = 11,44 (А) — треугольник
Полученные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на бирке.
3. Асинхронный двигатель АИРС100А4 мощностью 4,25 (кВт)
Аналогично, предыдущему.
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·380·0,78·0,82) = 10,1 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·220·0,78·0,82) = 17,45 (А) — треугольник
Расчетные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на шильдике двигателя.
4. Высоковольтный двигатель А4-450Х-6У3 мощностью 630 (кВт)
Этот двигатель можно подключить только в трехфазную сеть напряжением 6 (кВ). Схема соединения его обмоток — звезда.
Iном = P2/(1,73·U·cosφ·η) = 630000/(1,73·6000·0,86·0,947) = 74,52 (А)
Расчетный ток 74,52 (А) соответствует номинальному току 74,5 (А), указанному на бирке.
Дополнение
Представленные выше формулы это конечно хорошо и по ним расчет получается более точным, но есть в простонародье более упрощенная и приблизительная формула для расчета номинального тока двигателя, которая наибольшее распространение получила среди домашних умельцев и мастеров.
Все просто. Берете мощность двигателя в киловаттах, указанную на бирке и умножаете ее на 2 — вот Вам и готовый результат. Только данное тождество уместно для двигателей 380 (В), собранных в звезду. Можете проверить и поумножать мощности приведенных выше двигателей. Но лично я же настаиваю Вам использовать более точные методы расчета.
P.S. А вот теперь, как мы уже определились с токами, можно приступать к выбору автоматического выключателя, предохранителей, тепловой защиты двигателя и контакторов для его управления. Об этом я расскажу Вам в следующих своих публикациях. Чтобы не пропустить выход новых статей — подписывайтесь на рассылку сайта «Заметки электрика». До новых встреч.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Торможение асинхронного двигателя
При использовании асинхронного двигателя, в качестве составной части какого-либо электропривода, часто возникает потребность в искусственной остановке двигателя. В настоящее время существует множество различных способов торможения асинхронного двигателя, вот некоторые из них.
Динамическое (электродинамическое) торможение
Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В двигателе с фазным ротором, величину тормозного момента, а следовательно, скорость торможения, можно изменять, изменяя величину добавочных сопротивлений в цепи ротора.
Рекуперативное (генераторное) торможение
Рекуперативное торможение применяется в основном в качестве подтормаживания перед основным торможением, либо при спуске груза, например в лифтах.
Чтобы наступило рекуперативное торможение, нужно чтобы частота вращения ротора превысила синхронную частоту вращения. В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
Добиться генераторного торможения можно несколькими способами. Например, в двухскоростных двигателях, при переключении с большей скорости на меньшую. При этом ротор вращается по инерции с частотой, выше, чем новая синхронная частота. Возникнет тормозной момент, который уменьшит скорость до новой номинальной.
Допустим, что в начальный момент времени наш двигатель работал на характеристике 1 в точке A, после переключения скорости на более низкую, он перешел на характеристику 2 в точку B, а затем под действием тормозного момента достиг точки С, с меньшей частотой оборотов.
Генераторное торможение можно осуществить, если уменьшать частоту питания двигателя. Это возможно, если двигатель питается от тиристорного преобразователя частоты. При уменьшении частоты напряжения, уменьшается синхронная частота вращения. Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Торможение противовключением
Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем. Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Торможение при самовозбуждении
Если питание двигателя отключить, то его магнитное поле затухнет только через небольшой промежуток времени. Если в этот момент подключить к статорной обмотке двигателя батарею конденсаторов, то энергия магнитного поля будет переходит сначала в заряд конденсаторов, а затем снова возвращаться в обмотку статора. При этом возникнет тормозной момент, который остановит двигатель. Такое торможение часто называют конденсаторным.
Величина тормозного момента будет зависеть от емкости конденсаторов, чем больше емкость, тем больше момент
Конденсаторы могут быть включены постоянно, а могут отключаться во время работы двигателя с помощью контактора.
Можно обойтись и без конденсаторов, просто замкнув с помощью ключей SA, обмотку статора по схеме “звезда”, предварительно отключив ее от сети с помощью контактора K. Тогда торможение произойдет значительно быстрее, за счет остаточного магнетизма двигателя. Такое торможение еще называется магнитным торможением.
Рекомендуем к прочтению — регулирование скорости асинхронного двигателя
Асинхронный двигатель, его плюсы и минусы
Асинхронный двигатель — электрическая машина переменного тока, отличается максимальным пусковым моментом, небольшими показателями пускового тока. Название асинхронного аппарата происходит от слова «неодновременный». Прибор обеспечивает частоту вращения ротора ниже частоты вращения магнитного поля. От классических модификаций с короткозамкнутыми роторами, агрегат отличается простотой конструкции и дешевизной изготовления.
Обзор конструкции
Три основные составляющие двигателя – ротор, статор и корпус. Кожух обеспечивает защитные функции, предупреждает повреждения на статоре и роторе. Также позволяет закрепить подвижную, стационарную часть асинхронной машины.
Статор размещен неподвижно в двигателе, содержит станину и магнитопровод. Под воздействием пресса магнитный проводник фиксируется к станине и формирует электромагнитное ядро. Магнитное поле, создаваемое в ядре, беспрерывно вращается. Тонкие листы магнитопровода выполнены из электротехнической листовой стали, крепление пластин способствует образованию пазов и зубцов статора. Шихтованный сердечник, выступающий дополнительным элементом статора, также создан из статорных пластин. Листы сердечника соединяются сваркой, прессом и кольцевыми шпонками – аналогично образован магнитопровод.
Обмотка ротора представлена короткозамкнутыми кольцами, внешне напоминающими колеса беличьих клеток. Включает латунные или медные стержни, приваренные к короткозамкнутым кольцам на торцах. Кольца вбиты в пазы. Статор и ротор разделен воздушной прослойкой.
Обмотка двигателей с фазным ротором в начале изолирована, концы припаяны к контактным кольцам, позволяющим подключить пуско-регулирующий реостат. Цепь ротора получает дополнительное сопротивление, дает возможность регулировать частоту вращения и уменьшения пусковых токов.
Ключевые преимущества
Преимущества эксплуатации асинхронных электродвигателей (АД) состоят в следующем:
- Возможность прямого подключения к питающей сети без пускорегулирующих приборов при коэффициенте загрузки ≈1.
- Самостоятельный запуск группы асинхронных двигателей одной или нескольких питающих секций при кратковременном обесточивании и последующем возобновлении питания под воздействием станционной автоматики.
- Простота обслуживания и эксплуатации, доступная цена, высокая надежность, определяющая широкое применение в промышленности с целью привода механизмов, устойчивых к перепадам электроэнергии, пусковых показателей, скольжения.
- Безотказная работа на участках, размещенных на высоте над уровнем моря 1 км, при диапазоне температур – 40°С и +40 °С, влажности воздуха при +25°С не более 98%, запыленности — 10 мг/м3.
- Способность принимать различные механические перегрузки без существенных изменений КПД или нарушения стабильности работы.
- Полная автоматизация работы.
- Отсутствие необходимости проводить сложное и дорогостоящее обслуживание.
- Асинхронным двигателем проводят комплектацию редукторов (червячных и цилиндрических). Механизм способствует уменьшению угловых скоростей вала и повышению крутящих моментов.
- Широкий выбор конструкций. В зависимости от типа обмотки, различают асинхронные электродвигатели с короткозамкнутым и фазным ротором (с контактными кольцами).
По количеству используемых фаз устройства разделяют на одно-, двух-, трехфазные варианты.
Трехфазная обмотка обеспечивает лучшие пусковые характеристики и стабильную работу. Двухфазные электродвигатели оснащены двумя перпендикулярными обмотками статора, используемыми в однофазных сетях — одну обмотку соединяют напрямую с фазой, вторую питают фазосдвигающим конденсатором. Однофазный электродвигатель работает от пусковой катушки индуктивности, подключенной кратковременно через конденсатор к сети или замкнутой накоротко. Маломощные приборы выступают оптимальным вариантом для питания бытовых приборов.
Трехфазный асинхронный двигательОтрицательные характеристики асинхронного двигателя
АД обладает перечисленными ниже недостатками:
- Чувствительностью к перепадам напряжения.
- Высокими пусковыми токами при низких коэффициентах скольжений.
- Необходимостью использования преобразователей частоты, пусковых реостатов для улучшения характеристик электромотора.
- Небольшими показателями синхронной частоты вращения — не превышает 3000 об/мин. Для увеличения скорости потребуется редуктор или турбопривод.
- Сложной регулировкой производительности механизмов, вращающихся под воздействием асинхронного электродвигателя.
Асинхронные электродвигатели располагают приличной механической характеристикой. Несмотря на недостатки, они лидируют по показателям применения. Мощность двигателей серии АИР варьирует в пределах 0,06 и 400 кВт, высота оси вращения – 50-355 мм. Ток при максимальном напряжении — 0,55…5 А. КПД электродвигателя 66-83 %, что также является хорошим показателям для устройства с низкими эксплуатационными затратами.
Рекомендации по выбору устройства
Решив купить асинхронный электродвигатель, важно правильно определить обороты на выходе, мощность, посадочные параметры по лапам или габариты фланца, диаметр вала. Дополнительного внимания заслуживают стандарты моторов.
Зарубежные производители выпускают продукцию серии CENELEK, DIN и IEC, в отечественной промышленности также встречаются аналогичные стандарты. Например, под категорию DIN попадают двигатели: IMM, RA, РА, AIS, ИММ, Y2, М2АА, АИС. Ключевым отличием российских электромоторов стандарта ГОСТ от импортных устройств являются меньшие габариты.
Большинство потребителей отдает предпочтение европейским стандартам, благодаря разнообразному выбору. Также многие пользователи принципиально ищут импортные двигатели для использования в узкоспециальной среде: для постоянного тока, тельферов, приводов станков с ЧПУ. Однако отечественные электромоторы купить гораздо проще, в случае поломки не потребуется долгий поиск для замены деталей.
Похожие записи
краткий обзор существующих методов понижения пускового тока
Пуск двигателя постоянного тока имеет ряд отличительных особенностей.
Объясняется это большим значением пускового тока, которое необходимо предварительно ограничить.
Если этого не сделать, то может повредиться внутренняя цепь обмотки якоря.
Существует несколько способов запуска: прямой, реостатный и метод плавного повышения питающего напряжения.
Что происходит при пуске двигателя
По мере нарастания токовой нагрузки на обмотке статора увеличивается крутящий момент электродвигателя, который через вал передается на его подвижную часть – ротор. Чем быстрее возрастает крутящий момент, тем сильнее разогревается обмотка статора.
Это явление может привести к:- выходу из строя изоляции;
- возникновению вибраций;
- деформации механических частей двигателя;
- полному выходу из строя мотора.
Большой ток может вызвать бурное искрение под щетками, что приведет к выходу из строя коллектора.
Избежать поломки можно, понизив пусковой ток до номинальной частоты вращения сразу после старта электромотора. Добиться этого можно несколькими способами. Выбор оптимального варианта зависит от технических характеристик мотора и его назначения.
Прямой пуск
Данный метод основан на прямом подключении якорной обмотки к электрической сети при номинальном напряжении двигателя. Прямой пуск можно применять только в случае наличия стабильного питания мотора, жестко связанного с приводом.
Этот способ является одним из самых простых. Температура при прямом пуске повышается, по сравнению с прочими способами, незначительно.
Схема прямого пуска
Метод прямого пуска наиболее предпочтителен при отсутствии специальных ограничений на ток, поступающий от электросети.
Если электродвигатель работает в режиме частых запусков и отключений, его необходимо снабдить простейшим оборудованием. Его роль может выполнять расцепитель с ручным управлением. Напряжение в этом случае подается на клеммы электромотора.
Прямой пуск можно применять только на маломощных двигателях, поскольку пик нагрузки а крупных моделях может превышать номинальную нагрузку в 50 раз.
Реостатный пуск
Метод пригоден для запуска оборудования большой мощности. Процесс осуществляется следующим образом:
- Из провода, разделенного на секции и имеющего высокое удельное сопротивление, изготавливается реостат.
- Устанавливается ток возбуждения на уровне номинального значения.
- Во время запуска последовательно уменьшается сопротивление реостата, исключая таким образом скачки электрического тока.
Включение в схему реостата обеспечивает безопасность запуска двигателей самой высокой мощности.
Реостатный пуск
При реостатном пуске разгон двигателя происходит постепенно с постоянным ускорением. Количество ступеней реостата зависит от требований к плавности запуска мотора и разности
Imax – Imin.
Значения их сопротивлений определяется расчетом. В среднем пусковые реостаты имеют 2-7 ступеней.
Главная задача проектировщика – обеспечить одинаковое значение максимального и минимального тока на всех ступенях при их переключении в заданных временных интервалах.
Процесс переключения пускового реостата практически не поддается автоматизации. Если это необходимо (например, в автоматизированных установках), применяются пусковые сопротивления, поочередно шунтируемые контактами контакторов, работающих автоматически.
Как только двигатель войдет в рабочий режим, сопротивление реостата необходимо полностью вывести, поскольку рассчитывается оно только на кратковременную работу. Если ток будет проходить через реостат длительное время, он просто выйдет из строя.
Уменьшается сопротивление тоже ступенчато.
Пуск путем плавного повышения питающего напряжения
В обмотках двигателей насосов, конвейеров, воздуходувок в момент запуска возникают повышенные токи, превышающие их номинальное значение в 6 раз. Это явление отрицательно сказывается на составных частях мотора, снижая их долговечность. Поэтому в электрооборудовании мощностью свыше 1 кВт используют плавный пуск.
Смысл данного способа заключается в следующем: питающее напряжение повышается постепенно до тех пор, пока двигатель не выйдет на рабочий режим. Регулировка производится при помощи тиристоров или симисторов. Они располагаются «спина к спине» и устанавливаются на каждой из питающих линий переменного тока.
Устройство плавного пуска
Приводятся в действие тиристоры на начальном этапе, причем их включают последовательно с небольшой задержкой для каждого полупериода. Такая схема работы способствует эффективному наращиванию напряжения (среднего переменного) на электродвигателе вплоть до его выхода на номинальное напряжение электросети.
Как только мотор достигнет номинальной скорости вращения, его можно переключить напрямую по схеме байпас.
Управление большими двигателями осуществляется посредством установок плавного пуска или частотных преобразователей.
Но эти устройства с успехом заменяют:
- выключателями;
- разъединителями полного напряжения.
Последний подает полное напряжение на клеммы электродвигателя (принцип прямого пуска). Но такая схема возможна только на маломощных электроустановках.
Способ плавного пуска асинхронного двигателя с короткозамкнутым ротором
Существуют и другие мягкие пускатели, обеспечивающие плавную остановку двигателя. Они необходимы в устройствах, которые при резком снижении скорости вращения могут привести к их поломке или нарушениям разного характера. В качестве примера можно привести насос, быстрая остановка которого вызовет возникновение гидроудара в системе. Нежелательна резкая остановка конвейерных лент, в результате которой полотно может выйти из строя.
Плавный останов осуществляется по такому же принципу, что и плавный пуск – с использованием силовых полупроводников.Особенности плавного пуска трехфазных двигателей
На электродвигателях данного типа применяется мягкий пуск «звезда-треугольник». Схема работает следующим образом:
- изначально обмотки мотора соединены звездой;
- при выходе двигателя на заданные параметры они переключаются в соединение треугольником.
Система управления трёхфазным двигателем (инвертор)
В схему устройства входят:
- контакторы на каждую фазу;
- таймера, задающего интервал времени;
- реле перегрузки.
Такой способ позволяет держать пусковой ток на уровне 30% от его значения при прямом пуске. Соответственно, и крутящий момент ниже – не более 25%.
Применять метод «звезда-треугольник» можно только при наличии нагрузки на двигателе в момент его пуска.
Но чрезмерно нагруженное электрооборудование разогнать до номинальной скорости не удастся из-за недостаточного крутящего момента.
Устройства плавного могут играть роль регулятора напряжения электродвигателя, если в схеме присутствует соответствующий контроллер. Его задача – отслеживать коэффициент мощности мотора. Зависит он от нагрузки: при ее небольшом значении контроллер понизит напряжение и ток электродвигателя.
Пуск при пониженном напряжении цепи якоря
Ограничить пусковой ток можно, задействовав управляемый выпрямитель или отдельный генератор постоянного тока.Обмотка возбуждения питается от другого источника с полным напряжением, обеспечивающим полный пусковой ток.
Такой способ используется для запуска мощных двигателей с регулируемой скоростью вращения.
Реверсирование (изменение направления вращения) выполняется путем изменения направления тока в обмотке возбуждения или якоре.
Пуск асинхронного двигателя — методы запуска
Трехфазный асинхронный двигатель — это Самозапуск . Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться, и запускается асинхронный двигатель. Во время пуска скольжение двигателя составляет единиц , а пусковой ток очень велик.
Назначение стартера — не просто запустить двигатель, но он выполняет две основные функции.Они следующие.
- Для снижения сильного пускового тока
- Для защиты от перегрузки и пониженного напряжения.
Трехфазный асинхронный двигатель можно запустить, подключив двигатель напрямую к полному напряжению источника питания. Двигатель также можно запустить, подав на двигатель пониженное напряжение при запуске двигателя.
Крутящий момент асинхронного двигателя пропорционален квадрату приложенного напряжения. Таким образом, двигатель создает больший крутящий момент, когда он запускается при полном напряжении, чем когда он запускается при пониженном напряжении.
Существует три основных метода запуска асинхронного двигателя с клеткой . Они следующие.
Прямой пускатель
Метод прямого пуска асинхронного двигателя прост и экономичен. В этом методе пускатель подключается непосредственно к напряжению питания. Таким методом запускаются малые двигатели мощностью до 5 кВт, чтобы избежать колебаний напряжения питания.
Пускатель звезда-треугольник
Метод пуска трехфазных асинхронных двигателей со звездой-треугольником очень распространен и широко используется среди всех методов.В этом методе двигатель работает с обмотками статора, соединенными треугольником.
Автотрансформатор, стартер
Автотрансформатор используется в обоих типах соединений, т. Е. При соединении звездой или треугольником. Автотрансформатор используется для ограничения пускового тока асинхронного двигателя.
Вышеуказанные три пускателя используются для асинхронного двигателя с ротором с сепаратором.
Пускатель асинхронного двигателя с контактным кольцом Способ пуска асинхронного двигателя
В пускателе асинхронного двигателя с контактным кольцом на пускатель подается полное напряжение питания.Схема подключения асинхронного двигателя пускателя с контактным кольцом показана ниже.
Подключается полное пусковое сопротивление, что снижает ток питания статора. Ротор начинает вращаться, и сопротивление ротора постепенно снижается по мере увеличения скорости двигателя. Когда двигатель работает с номинальной частотой вращения при полной нагрузке, пусковое сопротивление полностью отключается, а контактные кольца замыкаются накоротко.
Разница между бесщеточным двигателем постоянного тока и асинхронным двигателем с экранированными полюсами
Двигатели, приводящие в действие охлаждающие вентиляторы, как правило, являются бесщеточными или асинхронными двигателями.Здесь мы исследуем основные различия в конструкции этих двух типов двигателей и объясняем причину разительных различий в энергоэффективности между двумя типами.
Бесщеточные двигатели иногда называют двигателями с электронной коммутацией. Здесь под коммутацией понимается акт переключения электрического соединения с одной обмотки двигателя на следующую. Обмотки двигателя в двигателе постоянного тока обычно располагаются в статоре или неподвижной части двигателя. Затем ротор содержит магнит с чередующимися полюсами.(Двигатель постоянного тока с магнитами в роторе иногда называют аутраннером. Возможны и другие конфигурации, но они не так широко используются, как моторы.)
Ротор бесщеточного двигателя вентилятора постоянного тока с магнитом. Бесщеточные двигатели с магнитами в роторе называются внешними двигателями. Статор четырехполюсного бесщеточного двигателя постоянного тока (от вентилятора Orion). Красные стрелки указывают направление, в котором один набор полюсов тянет ротор. Одновременно другой набор полюсов (желтые стрелки) давит на ротор.Бесщеточный двигатель постоянного тока использует электронный контроллер для последовательного питания обмоток статора, превращая их в электромагниты, в последовательности, в которой вращается ротор. Для начала, один набор катушек (то есть катушка и катушка, расположенная на 180º от нее) будет запитан, чтобы стать электромагнитами. Это заставляет противоположные полюса ротора и статора притягиваться друг к другу. Когда ротор приближается к катушке, находящейся под напряжением, возбуждается следующая катушка, и катушка, ближайшая к полюсу ротора, отключается.Когда ротор вращается рядом со следующей катушкой на статоре, катушка, ближайшая к полюсу ротора, отключается. Эта последовательность повторяется по мере вращения ротора. Следует отметить, что всегда есть один набор катушек, тянущих за собой ротор, заставляя его вращаться.
Для простоты это объяснение касается только одного набора катушек за раз. Однако одновременно под напряжением находится более одного набора катушек. В действительности, набор катушек позади набора, тянущего за ротором, возбуждается таким образом, что он давит на ротор, а не тянет его.Таким образом, существует комбинированный эффект вытягивания и толкания ротора, что придает этому двигателю большую эффективность. Комбинированный эффект заключается в том, что большинство катушек статора почти все время воздействуют на ротор. А высокая эффективность — одна из причин, по которой вы видите вентиляторы, в которых используются двигатели постоянного тока с электронной коммутацией.
Одним из аспектов работы бесщеточного двигателя является необходимость знания положения магнитных полюсов в роторе. Чтобы запустить нужные катушки статора в нужное время, контроллер должен определять положение ротора.Контроллер считывает датчик положения ротора, чтобы решить, на какие катушки подать напряжение.
Датчик Холла, видимый на бесщеточном двигателе вентилятора постоянного тока Orion.Обычный способ определения положения ротора — датчик Холла. Также возможно измерить обратную ЭДС в неприведенных катушках, чтобы сделать вывод о положении ротора, что устраняет необходимость в отдельных датчиках эффекта Холла, но эта схема немного сложнее.
Бесщеточные двигатели обычно имеют КПД от 85 до 90% в основном потому, что большая часть энергии, поступающей в катушки, фактически перемещает ротор.Мы можем сравнить бесщеточный двигатель постоянного тока с другим типом вентиляторов — асинхронным двигателем с экранированными полюсами.
Асинхронные двигателиполучили свое название потому, что электромагниты в статоре индуцируют магнетизм в роторе. Они индуцируют магнетизм в роторе, потому что, в отличие от ротора бесщеточного двигателя постоянного тока, ротор асинхронного двигателя не содержит магнитов.
Асинхронный двигатель с экранированными полюсами и короткозамкнутый ротор. Это от вентилятора Orion. Хотя их трудно обнаружить, вот контрольные прорези в пластинах для затеняющих катушек этого двигателя вентилятора с затемненной спиралью.Термин «затененный полюс» происходит от использования в статоре отдельной небольшой обмотки, называемой затеняющей катушкой. Электромагниты в статоре образованы катушками вокруг стальных пластин. Затеняющая катушка наматывается на небольшой участок пластин. Когда переменный ток подается на основную обмотку, часть результирующего магнитного потока связывается с затеняющей катушкой. Это индуцирует ток в затеняющей катушке, которая ведет себя как вторичная обмотка трансформатора. Индуцированный ток, в свою очередь, создает собственный (слабый) магнитный поток, который отстает от магнитного потока в основной части статора.Следовательно, между двумя потоками существует смещение во времени и пространстве. Это смещение во времени и пространстве создает условия для вращающегося (или смещающегося) магнитного поля. Вращающееся магнитное поле — это то, что запускает и поддерживает вращение ротора.
В некоторых двигателях с экранированными полюсами катушка с экранированными полюсами не используется. Вместо этого они используют небольшой разрыв в пластинах, которого может быть достаточно для создания запаздывающего магнитного поля, необходимого для вращения ротора.
Преимущество двигателей с экранированными полюсами заключается в том, что они недороги, поскольку имеют довольно простую конструкцию.Но проблема в том, что они неэффективны, в основном из-за связи с потерями между затемненной катушкой и основной обмоткой. КПД двигателей с экранированными полюсами обычно составляет от 15 до 30%. Да и коэффициент мощности невысокий.
Низкий коэффициент мощности и низкий КПД, вероятно, приемлемы для приложений, где используется только один небольшой вентилятор (двигатели с экранированными полюсами обычно имеют мощность 40 Вт или меньше). Но рассмотрим такое приложение, как центр обработки данных, содержащий стойки, стойки, стойки и стойки с серверами, и у каждого из этих серверов есть свой вентилятор.Не рекомендуется иметь сотни или даже тысячи вентиляторов, работающих с КПД только 30%. Эти приложения действительно могут извлечь выгоду из использования технологии бесщеточного двигателя и предполагаемого КПД 90%.
ECE 494 — Лаборатория 5: Испытания под нагрузкой трехфазного асинхронного двигателя и измерение пускового тока
Цели
- Для измерения пускового тока при пуске двигателя.
- Для получения нагрузочных характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором.
Оборудование
- Два цифровых мультиметра и измеритель качества Fluke Power с банановыми кабелями со склада
- Один тахометр со склада.
- Измеритель мощности One Black Box
- Нагрузочная стойка с одним резистором. (Регулируемая тележка HMRL)
- Один трехфазный вариак.
- Один настольный многодиапазонный источник питания постоянного тока (PSW 250-4,5)
Фон
Трехфазный асинхронный двигатель имеет трехфазную обмотку на статоре.Ротор либо намотанный, либо из меди. стержни закорочены на каждом конце, в этом случае это называется короткозамкнутым ротором. Трехфазный ток, потребляемый статором от Трехфазный источник питания создает магнитное поле, вращающееся с синхронной скоростью в воздушном зазоре. Магнитный поле сокращает проводники ротора создают электродвижущие силы, которые вызывают в них токи. Согласно закону Ленца, ЭМП должны противодействовать причина, которая их производит; это означает, что ротор должен вращаться в направлении магнитного поле, созданное статор.Если бы ротор мог достигать синхронной скорости, в нем не было бы наведенной ЭДС. Но за счет потерь скорость всегда меньше синхронной скорости.
В этом эксперименте асинхронный двигатель приводит в действие генератор постоянного тока. Поле генератора постоянного тока возбуждается отдельно. Загрузка Генератор с помощью резисторной стойки нагрузки, в свою очередь, нагружает двигатель. Когда двигатель приводит в движение нагрузку, он должен создавать больший крутящий момент. Поскольку крутящий момент пропорционален произведению магнитного потока и тока, с увеличением нагрузки относительная скорость (скольжение) между ротором и вращающееся магнитное поле также должно увеличиваться.
Трехфазный асинхронный двигатель действует как трансформатор, вторичная обмотка которого может вращаться. Основное отличие в том, что нагрузка механическая. Кроме того, сопротивление магнитному полю больше из-за наличия воздушного зазора, через который мощность статора передается на ротор. Ток холостого хода двигателя иногда достигает 30-40% от полной нагрузки. значение. Производительность асинхронного двигателя может быть определена косвенно путем нагрузки генератора постоянного тока, соединенного с его валом, как есть. сделано в этом эксперименте.
Соответствующие уравнения
- Данные без нагрузки: I a0 = Линейный ток в амперах
- Данные нагрузочного теста:
- Прочие данные: R a = Измеренное сопротивление статора по фазе
- Потери в сердечнике (включая потери на трение и ветер) согласно
- Выходная механическая мощность
- Поскольку одна лошадиная сила равна 746 Вт, мы используем преобразование
- Крутящий момент
- Коэффициент мощности при любой нагрузке рассчитывается с использованием
- Эффективность определяется по
(5,1)
В t = Напряжение на клеммах в вольтах.
(5,2)
P 0 = Входная мощность (сумма обоих показаний ваттметра).
(5,3)
N 0 = Скорость двигателя в об / мин.
(5,4)
I a = Линейный ток в амперах.
(5,5)
В t = Напряжение на клеммах в вольтах.
(5,6)
P = входная мощность (сумма обоих показаний ваттметра).
(5,7)
N = скорость двигателя в об / мин.
(5,8)
(5,9)
(5.10)
(5,11)
Где(5,12)
(5,13)
N с = 120 f / p синхронная скорость
(5,14)
f = частота = (60 Гц)
(5,15)
p = Количество полюсов = 4
(5,16)
(5.17)
P м (л.с.) = P м (Вт) / 746
(5,18)
(5,19)
(5.20)
Prelab
Асинхронным двигателямприсвоены коды NEMA, которые указывают возможный диапазон их пускового тока.
| Буквы кода NEMA KVA | ||||
| Код кВА / л.с. Код кВА / л.с. | ||||
| А | 0–3,14 | л | 9,0–9,99 | |
| B | 3,15–3,54 | M | 10,0-11,19 | |
| С | 3,55–3,99 | N | 11.2-12.49 | |
| D | 4,0–4,49 | -п. | 12,5–13,99 | |
| E | 4,5–4,99 | R | 14,0-15,99 | |
| Ф | 5,0-5,59 | S | 16,0-17,99 | |
| G | 5,6-6,29 | т | 18.0-19,99 | |
| H | 6.3-7.09 | U | 20,0-22,39 | |
| Дж | 7,1–7,99 | В | 22.4 и выше | |
| К | 8,0–8,99 | |||
В таблице дано отношение пусковой кВА (сумма всех трех фаз) к номинальной мощности в л.с.
- Учитывая, что наши двигатели рассчитаны на 3 л.с. и имеют код J NEMA, рассчитайте пиковый пусковой ток на однофазный с линейным напряжением 208 В (фазное напряжение 120).
- Определите, как подключить счетчики к схеме рисунка 5.1 для измерения:
- Полная мощность (Вт) асинхронного двигателя. Показать соединения с аналоговыми ваттметрами мощности и измерителями качества электроэнергии (Fluke 43B). Подсказка: двухваттный метод измерения мощности.
- Клемма переменного тока Напряжение В т асинхронного двигателя.
- Линейный ток I a .
- Напряжение генератора В пост. Тока
- Ток нагрузки генератора I пост. Тока
Часть I. Трехфазный асинхронный двигатель — испытания под нагрузкой
- Запишите спецификации асинхронного двигателя (IM)
- Установите и измерьте сопротивление грузовой стойки таким же образом, как в предыдущем эксперименте, для 6 различных чтения.Он должен находиться в диапазоне от 500 Ом до 30 Ом. Используйте последовательно две группы тележки, так как они рассчитаны на 120 В. Настройки переключателей на двух банках должны быть одинаковыми.
- Подключите цепь, как показано на рисунке 5.1. и поверните реостат шунтирующего поля панели стола на максимальное сопротивление (CW). Примечание. Убедитесь, что ваши измерители мощности могут выдерживать ток, рассчитанный вами в предварительной лаборатории. Если они не могут тогда вам нужно закоротить катушку тока до тех пор, пока двигатель не будет запущен.Если в вашем измерителе мощности есть токовые клещи и номинальный ток меньше, чем вы определили, поместите зажим вокруг измеряемого провода только после запуска двигателя.
- Подключите источник питания переменного тока от настольной панели к трехфазному вариатору и подключите его выход к цепи.
- Включите настольный источник питания постоянного тока и нажмите кнопку настройки, чтобы отрегулировать выходное напряжение до 240 В и ток (IF) до 0,275 А с помощью его ручек.Перед включением двигателя отрегулируйте выход трехфазного переменного тока на 208 В между фазами.
- Нажмите кнопку выхода источника постоянного тока, чтобы подключить источник постоянного тока 240 В к шунту возбуждения двигателя постоянного тока для генерации тока возбуждения IF.
- При отсутствии нагрузки, подключенной к стойке резисторной нагрузки, нажмите кнопку пуска на панели стенда, чтобы запустить двигатель, отсоедините провод, закорачивающий токовую катушку ваттметра, или поместите токовые клещи вокруг провода, чтобы получить показания мощности.Если индикатор ваттметра отклоняется в неправильном направлении, просто поменяйте местами соединения. на стороне напряжения счетчика. Запишите напряжение переменного тока на клеммах В t , скорости, показания обоих ваттметров и напряжения нагрузки постоянного тока V dc . в таблице 5.1 (без данных нагрузки)
- Подключите стойку нагрузки резисторов к клеммам якоря генератора. Для каждого значения нагрузки запишите показания V t , I a , W 1 , W 2 , V dc скорость N и I dc (шкала 10 А) в таблице 5.1. (Данные нагрузочного теста)
- Отключить питание; отключите двигатель от источника питания. Измерьте сопротивление между двумя выводами привода асинхронный двигатель. Резистор обмотки статора R a составляет половину сопротивления значение, измеренное между клеммами источника питания асинхронного двигателя с маркировкой L 1 и L 2 на скамейке. Это происходит потому, что в схеме звезды соединены две фазы. последовательно между клеммами L 1 и L 2 .
Отчет
- Покажите характеристики асинхронного двигателя.
- Полная таблица 5.2.
- Постройте график КПД η, коэффициента мощности pf, скорости N, мощности и крутящего момента. T m против входного тока I a on тот же график.
- Объясните формы графиков pf, об / мин и КПД
Часть II. Пусковой ток.
В этой части вы будете измерять пусковой ток вашего асинхронного двигателя. Буквы кода NEMA на двигателе проинформируйте пользователя о примерном пусковом токе. Убедитесь, что вы записали код NEM A и номинальную мощность машины.
Используйте USB-кабель с оптической связью для подключения измерителя к компьютеру. Запустите программное обеспечение Flukeview на компьютере и убедитесь, что он подключен к вашему счетчику. Если нет, посмотрите диспетчер устройств, чтобы определить порт, к которому он подключен. к, а затем выберите этот порт для программного обеспечения Flukeview.
Используйте ту же схему подключения, что и в части I. Выберите Пусковой ток в меню измерителя. Введите 1 секунду для времени измерения. Параметр, обозначенный как максимальный ток, на самом деле является током на деление экрана. Настройте зонд и измеритель так, чтобы Прочтите значение пускового тока, рассчитанное в вашей предварительной лаборатории.
Переместите меню пускового тока в начало. Когда вы будете готовы, нажмите пуск на счетчике, а затем кнопку пуска двигателя. Метр не начнет измерения, пока не обнаружит текущий поток.Измеритель должен отображать кривую текущего времени. Используйте программное обеспечение Fluxview чтобы зафиксировать этот сигнал для вашего отчета. Лучше всего записать данные в электронную таблицу Excel, чтобы вы могли управлять графиком для лучшего просмотра.
Отчет
- Показать зафиксированную волну броска тока.
- Опишите все примечательные особенности пускового тока. Вы можете их объяснить?
- Какое максимальное абсолютное значение тока во время броска тока?
- Определите расчетный пусковой ток асинхронного двигателя (IM), используя его код NEMA.
- Как долго сохраняется пусковой ток?
| Таблица 5.1: Данные эксперимента | ||||||||
| правый левый Ом | В т Вольт | I a Ампер | Вт 1 Ватт | Вт 2 Ватт | P = W 1 + W 2 Ватт | I постоянного тока Ампер | В постоянного тока Вольт | N об / мин |
| Таблица 5.2: Расчетные данные | |||||
| I a | пф | N | л.с. | т м | η |
Обсуждение
- Кратко обсудите любые два метода запуска и промышленный асинхронный двигатель.
- Отчет о влиянии переключения любых двух клемм трехфазного источника питания на вращение.
— STMicroelectronics
Асинхронный двигатель переменного тока — это один из самых простых и надежных типов электродвигателей переменного тока с мощностью от нескольких ватт до многих киловатт. Существует множество различных способов проектирования и управления такими двигателями, от недорогих с однофазным входом до высокой точности с многофазным подходом, и этот тип системы является наиболее широко используемым двигателем на потребительском и промышленном рынках.
Мы предлагаем полный спектр силовых полупроводников и ИС, включая дискретные IGBT и силовые MOSFET, а также силовые модули и интеллектуальные силовые модули (IPM), высоковольтные драйверы затворов и мощные микроконтроллеры STM32, необходимые для реализации высокоэффективного частотно-регулируемого привода. (VFD) управление двигателем.
Мы также разработали полную экосистему с рядом оценочных плат, эталонных проектов, прошивок и инструментов разработки, чтобы упростить и ускорить цикл проектирования.
Принцип работы
Асинхронный двигатель использует переменный ток в статоре или неподвижной обмотке для создания магнитного поля в металлической клетке или проволочной обмотке в качестве ротора. Взаимодействие электрического и магнитного полей приводит в движение двигатель без каких-либо соединений между движущимися частями через контактное кольцо, что делает его очень надежным .
Управление скоростью двигателя
Управление скоростью двигателя зависит от скорости вращения магнитного поля, которая зависит от частоты переменного тока и количества полюсов.Вращающееся магнитное поле переменного тока в статоре приводит к индукции магнитного потока в роторе, а взаимодействие электрического и магнитного полей создает вращение.
Поскольку индуцированный ток в роторе отстает от магнитного потока в статоре, ротор никогда не достигнет полной скорости вращения магнитного поля, также называемой синхронной скоростью .
Однофазный переменный ток постоянной частоты используется для управления меньшими нагрузками в бытовых приборах, при этом частота обеспечивает фиксированную скорость.
Частотно-регулируемые приводы (VFD) чаще используются в вентиляторах, насосах и компрессорах для управления скоростью двигателя. Трехфазный асинхронный двигатель обеспечивает более плавное движение с большим контролем и точностью позиционирования двигателя, и существуют конструкции двигателей с пятью или более полюсами. Эти многофазные конструкции обеспечивают более высокую точность позиционирования двигателя, позволяя более точную подачу жидкостей через насосы или позиционирование лопастей всех типов, но требуют более сложных систем управления.Эти системы управления двигателями также развиваются от простых скалярных систем до различных типов полевых алгоритмов управления (FOC) или векторного управления.
Основные типы асинхронных двигателей
Существует двух основных типов конструкции с асинхронным двигателем, один с ротором с обмоткой , а другой с ротором с короткозамкнутым ротором . Этот ротор с короткозамкнутым ротором представляет собой цилиндр из стальных пластин с алюминиевыми или медными проводниками, встроенными в его поверхность, где индуцируется магнитное поле.
Асинхронные двигатели с обмоткой и короткозамкнутым ротором могут приводиться в действие одно- или трехфазным переменным током с постоянной или переменной частотой, что дает широкий диапазон рабочих характеристик от небольших домашних двигателей до больших промышленных двигателей, приводящих в движение большие насосы или компрессоры. Это также приводит к большому количеству систем управления.
Однофазный асинхронный двигатель требует конфигурации стартера для обеспечения пускового момента, в то время как трехфазный двигатель может самозапускаться по своей природе, поскольку можно управлять различными фазами, чтобы запустить ротор.Контроль коэффициента мощности и прямое регулирование крутящего момента могут помочь повысить производительность трехфазного асинхронного двигателя.
Связанные приложения
Асинхронный двигатель, ориентированный на поле управления
Полевое управление приводом асинхронного двигателя
В этом примере моделирования ориентированное на поле управление асинхронным двигателем реализовано в s-области.
Есть несколько важных аспектов силового каскада, который характеризуется красными линиями, включая:
- Источник постоянного напряжения
- 3-х фазный инвертор
- асинхронный двигатель модели
- механическая нагрузка с постоянным моментом
Ступень управления характеризуется зелеными полосами, которые имеют следующие основные компоненты:
- Расчет скольжения
- Генерация теты, используемая преобразованиями abc-dq0 и dq0-abc
- ПИ-регуляторы для Id, Iq
- ПИ-регулятор скорости
- Начальное преобразование abc-dq0 от датчиков тока для двигателя
Расчет тета и электрической скорости
Проскальзывание рассчитывается путем деления эталонного Iq на эталонный Id, умноженного на инвертированную постоянную времени ротора, Rr / (Lm + Lr), 3.7. Затем это добавляется к преобразованию измеренной скорости вала в магнитные обороты в секунду с помощью блока RPM_to_MRS, (0,1047187 * 3). Сначала мы конвертируем об / мин в рад / с: об / мин * 2 * pi / 60 = 0,10471975511966, затем это умножается на пары полюсов двигателя, в данном случае 3.
Проскальзывание добавляется к механической скорости, которая дает скорость электрической системы. Затем электрическая скорость интегрируется для генерации тета, которая используется блоками преобразования dq. В нашем моделировании тета может накапливаться, и если это будет реализовано с помощью DSP, потребуется интеграл сброса с нижним пределом 0 и верхним пределом 2 * pi, чтобы предотвратить переполнение памяти.
Двигатель имеет очень небольшую нагрузку при моделировании, в результате скольжение, разница между электрической и механической скоростью, минимальна. При нагрузке крутящим моментом 100 Н * м скольжение составит ~ 2%.
Преобразование ссылки DQ
В этом моделировании преобразование abc-dq0 от датчиков обратной связи предполагает, что ось q отстает от оси d, в блоке преобразования можно переключить флаг, чтобы ось q опережала ось d.
Регулировка скорости
Скорость двигателя контролируется Iq.Двигатель работает в 1-м квадранте с положительным крутящим моментом и положительной скоростью. Итак, положительная скорость дает положительное значение Iq; однако Iq из обратной связи двигателя имеет отрицательное значение в 1-м квадранте, поэтому блок усиления P14 решает эту проблему со знаком.
Результаты моделирования
Ниже приведены результаты моделирования, генерируемый крутящий момент — это верхняя осциллограмма, а три фазных тока — под ней. Создаваемый крутящий момент увеличивается по мере того, как двигатель разгоняется до задания скорости, и мы можем видеть, что фазные токи уменьшаются при достижении одной установившейся скорости.
Управление скоростью асинхронного двигателя, ориентированного на поле, с помощью контроллера DSPIC
ТЕХНОЛОГИЯ ВЕТРОВОЙ ТУРБИНЫ
Модуль 2.2-2 ТЕХНОЛОГИЯ ВЕТРОВОЙ ТУРБИНЫ Электрическая система Герхард Дж. Гердес Семинар по возобновляемым источникам энергии 14-25 ноября 2005 г. Нади, Республика острова Фиджи Содержание Модуль 2.2 Типы генераторных систем
Дополнительная информацияЦифровое управление Acim с помощью dspic
Цифровое управление Acim с использованием dspic П. Сантош, М. Мутажаги, Д. Картик, доцент инженерного колледжа Карпагам, Коимбатур, Индия, доцент инженерного колледжа Карпагама, Коимбатур,
Дополнительная информацияШиротно-импульсная модуляция (ШИМ)
Руководство по технологиям управления ШИМ-приводы переменного тока Версия 1.0 с широтно-импульсной модуляцией (ШИМ) На рисунке 1.8 показана блок-схема блока преобразования мощности в приводе с ШИМ. В этом типе привода выпрямитель диодный мост
Дополнительная информацияОсновы моторики. Двигатель постоянного тока
Основные принципы работы двигателя Прежде чем мы сможем исследовать функцию привода, мы должны понять основные принципы работы двигателя. Он используется для преобразования электрической энергии, подаваемой контроллером, в механическую
. Дополнительная информацияПРИВОД ПЕРЕМЕННОГО ТОКА С ЧАСТОТНЫМ УПРАВЛЕНИЕМ
ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА С ЧАСТОТНЫМ УПРАВЛЕНИЕМ 1.0 Характеристики стандартных электродвигателей переменного тока Асинхронный электродвигатель с короткозамкнутым ротором — это электродвигатель, наиболее широко используемый в промышленности. Эта лидирующая позиция приводит в основном к
Дополнительная информацияЛабораторная работа 14: Трехфазный генератор переменного тока.
Лабораторная работа 14: Трехфазный генератор переменного тока. Цель: получить кривую насыщения генератора без нагрузки; для определения характеристики регулирования напряжения генератора с резистивной, емкостной и индуктивной
Дополнительная информацияНаучная библиотека ученых
Доступно на сайте www.scholarsresearchlibrary.com Научно-исследовательская библиотека Архив прикладных научных исследований, 2010, 2 (2): 380-387 (http://scholarsresearchlibrary.com/archive.html) ISSN 0975-508X
Дополнительная информацияУстановка 33 Трехфазные двигатели
Модуль 33 Трехфазные двигатели Задачи: Обсудить работу двигателей с фазным ротором. Обсудите работу сельсиновых моторов. Обсудите работу синхронных двигателей.Определить направление вращения
Дополнительная информацияРабочий лист EET272, неделя 9
Рабочий лист EET272 Неделя 9 ответьте на вопросы 1–5 в рамках подготовки к обсуждению викторины в понедельник. Завершите остальные вопросы для обсуждения в классе в среду. Вопрос 1 Вопросы AC становятся
Дополнительная информацияБумага по качеству электроэнергии №3
Влияние провалов напряжения на асинхронные двигатели Автор: М. Д. Маккалок 1.ВВЕДЕНИЕ Падения напряжения, вызванные неисправностями в системе, влияют на производительность асинхронных двигателей с точки зрения производства
Дополнительная информацияЭЛЕКТРОТЕХНИКА
EE ELECTRICAL ENGINEERING Сокращения, номера курсов и кодировки см. В начале раздела H. * Обозначает лабораторные работы, которые проводятся через неделю. Минимальная оценка C требуется для всех предварительных условий
. Дополнительная информацияC Стандартные двигатели переменного тока
C Стандартный AC Стандартный AC C-1 Обзор, серия продуктов… C-2 Постоянный … C-9 C-21 C-113 Реверсивный C-147 Обзор, серия продуктов Реверсивный электромагнитный тормоз постоянного действия C-155 Электромагнитный тормоз
Дополнительная информацияНастройка для ШИМ-тестов двигателя BLDC
Настройка для ШИМ-тестов двигателя BLDC Автор: Арбер Никай Дата: 11.11.13 Аннотация В этой заметке по применению исследуется управление двигателем BLDC и предлагается решение для настройки двигателя BLDC для тестирования ШИМ с использованием Texas
Дополнительная информация .