Однофазные электродвигатели 220в. Двигатели 220 вольт от 0.37 до 4 кВт.
Общие сведения об однофазных электродвигателях
Бытовой электродвигатель — это двигатель однофазный, который, по ошибке, часто называют «двухфазный электродвигатель», т.к. он применятся в сети с напряжением 220В. В связи с этим двигателиь однофазный называют электродвигатель 220 или двигатель 220в. Электродвигатели серии АИРЕ (двигатели однофазные — «бытовые электродвигатели») асинхронные однофазные с короткозамкнутым ротором конденсаторные предназначены для работы от сети переменного тока напряжением 220 В частотой 50 Гц. Допускается работа от сети напряжением 230 В частотой 50 Гц и 220, 230 В частотой 60 Гц. Двигатель однофазный 220в выполнен с двухфазной обмоткой на статоре («двухфазный двигатель»). Для уменьшения влияния температуры окружающей среды на емкость конденсаторов их следует размещать в местах, наименее подверженных колебаниям температуры. В процессе эксплуатации двигателя рекомендуется периодически контролировать величину емкости конденсатора.
Условия эксплуатации однофазного двигателя 220в
- Напряжение и частота: 220В при частоте 50 Гц.
- Вид климатического исполнения: У2, У3, У5, УХЛ,2, Т2.
- Режим работы: S1.
- Степень защиты базового варианта: IP 54.
- Степень охлаждения — IC 041.
- Класс нагревостойкости изоляции: электродвигатели изготавливаются с изоляцией класса нагревостойкости «В» или «F» по ГОСТ 8865-93.
- Номинальные значения климатических факторов по ГОСТ 15150-69 и ГОСТ 15543.1-89.
- Запыленность воздуха не более 2 мг/м3.
- Группа механического исполнения М1 по ГОСТ 17516.1-90.
- Воздействие вибрационных нагрузок для двигателей, соответствующих 1 степени жесткости по ГОСТ 17516.1-90.
Область применения однофазного двигателя
Однофазный асинхронный двигатель предназначен для привода механизмов. В частности насосов, вентиляции и для другово бытового оборудования. Электродвигатели с питанием напряжения 220в комплектуются как одним, так и двумя конденсаторами (рабочий и пусковой). Электродвигатели серии АИРЕ, АИРМУТ, АИРУТ, АДМЕ, АИСЕ, АИС2Е (однофазные с двумя конденсаторам) последние подходят для использования на оборудовании требующей большой пусковой момент: деревообрабатывающих станков, транспортеров, компрессоров, подъемников и др., применяется для привода средств малой механизации: кормоизмельчителей, бетоносмесителей и др. Электропитание осуществляется от сети переменного тока напряжением 220В. Как правило, двигатели поставляются заводами-изготовителями укомплектованными конденсаторами (потребителю остается только подключить двигатель к однофазной сети согласно схеме подключения). Монтажные исполнения однофазных двигателей и их габаритно-присоединительные размеры соответствуют общепромышленным двигателям серии АИР(АИРМ, 5А , АДМ и пр.) Расшифровка обозначения : АИРЕ, АИРМУТ, АИСЕ — однофазный электродвигатель с двухфазной обмоткой и рабочим конденсатором. АИР3Е, АИР3УТ — однофазный электродвигатель с трехфазной обмоткой и рабочим конденсатором.
Электродвигатели серии АИРЕ, АИРМУТ, АИРУТ, АДМЕ, АИСЕ, АИС2Е (однофазные с двумя конденсаторам) последние подходят для использования на оборудовании требующей большой пусковой момент: деревообрабатывающих станков, транспортеров, компрессоров, подъемников и др., применяется для привода средств малой механизации: кормоизмельчителей, бетоносмесителей и др. Электропитание осуществляется от сети переменного тока напряжением 220В. Как правило, двигатели поставляются заводами-изготовителями укомплектованными конденсаторами (потребителю остается только подключить двигатель к однофазной сети согласно схеме подключения). Монтажные исполнения однофазных двигателей и их габаритно-присоединительные размеры соответствуют общепромышленным двигателям серии АИР(АИРМ, 5А , АДМ и пр.) Расшифровка обозначения : АИРЕ, АИРМУТ, АИСЕ — однофазный электродвигатель с двухфазной обмоткой и рабочим конденсатором. АИР3Е, АИР3УТ — однофазный электродвигатель с трехфазной обмоткой и рабочим конденсатором.
Пример условного обозначения электродвигателя аире:
АИРE 100S4 У3 IМ1081
- АИРЕ —
- А асинхронный,
- И унифицированная серия (Интерэлектро)
- Р привязка мощностей к установочным размерам (Р по ГОСТ, С -по (CENELEK, DIN)
- Е однофазный двигатель
- 100 -габарит двигателя(высота между центром вала и основанием)
- S — установочный размер по длине станины
- 4 — число полюсов
- У3 -климатическое исполнение и категория размещения
- IМ1081 — исполнения на лапах
Конструктивные исполнения по способу монтажа:
- IM 1081 (лапы)
- IM 3081 (фланец )
Конструктивные исполнения по способу монтажа: IM1081
Конструктивное исполнение по способу монтажа: IM1081 — на лапах с одним цилиндрическим концом вала.
Габаритные, установочные и присоединительные размеры IM 1081
| Тип двигателя | Число полюсов | Установочные и присоединительные размеры, мм | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| l1 | l10 | b1 | b11 | h | d1 | d10 | l30 | l33 | h41 | d30 | ||
| АИРМУТ 63 | 2,4 | 30 | 80 | 5 | 129 | 63 | 14 | 7 | 227 | 261 | 154 | 135 |
| АИРУТ 71 | 2,4 | 40 | 90 | 6 | 135 | 71 | 19 | 7 | 272,5 | 316,5 | 188 | 163 |
| АИРЕ 80 А | 2,4 | 50 | 100 | 6 | 155 | 80 | 22 | 10 | 296,5 | 350 | 204,5 | 177 |
| АИРЕ 80 В | 2,4 | 50 | 100 | 155 | 80 | 22 | 10 | 320,5 | 374 | 204,5 | 177 | |
| АИРЕ 100S | 4 | 60 | 112 | 8 | 200 | 100 | 28 | 12 | 360 | 424 | 246,5 | 226 |
| АИСЕ 100L | 2 | 60 | 140 | 8 | 200 | 100 | 28 | 12 | 391 | 455 | 246,5 | 226 |
| АИС2Е100LВ | 2 | 60 | 140 | 8 | 200 | 100 | 28 | 12 | 391 | 455 | 246,5 | 226 |
| АИС2Е112МВ | 2 | 80 | 140 | 10 | 228 | 112 | 32 | 12 | 435 | 520 | 285 | 246 |
Конструктивные исполнения по способу монтажа: IM 2081
Конструктивное исполнение по способу монтажа: IM2081 — на лапах с одним цилиндрическим концом вала.
Габаритные, установочные и присоединительные размеры IM2081
| Тип двигателя | Число полюсов | Установочные и присоединительные размеры, мм | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| l1 | l10 | b1 | b10 | b11 | h | d1 | d10 | d20 | d22 | d25 | n | l30 | h41 | d24 | ||
| АИРМУТ 63 | 2,4 | 30 | 80 | 5 | 100 | 129 | 63 | 14 | 7 | 130 | 10 | 130 | 6 | 227 | 154 | 160 |
| АИРУТ 71 | 2,4 | 40 | 90 | 6 | 112 | 135 | 71 | 19 | 7 | 165 | 12 | 130 | 272,5 | 188 | 200 | |
| АИРЕ 80 А | 2,4 | 50 | 100 | 6 | 125 | 155 | 80 | 22 | 10 | 165 | 12 | 130 | 8 | 296,5 | 204,5 | 200 |
| АИРЕ 80 В | 2,4 | 50 | 100 | 6 | 125 | 155 | 80 | 22 | 10 | 165 | 12 | 130 | 9 | 320,5 | 204,5 | 200 |
| АИРЕ 100S | 4 | 60 | 112 | 8 | 160 | 200 | 100 | 28 | 12 | 215 | 15 | 180 | 11 | 360 | 246,5 | 250 |
| АИСЕ 100L | 2 | 60 | 140 | 8 | 160 | 200 | 100 | 28 | 12 | 215 | 15 | 180 | 12 | 391 | 246,5 | 250 |
| АИС2Е100LВ | 2 | 60 | 140 | 8 | 160 | 200 | 100 | 28 | 12 | 215 | 15 | 180 | 12 | 391 | 246,5 | 250 |
| АИС2Е112МВ | 2 | 80 | 140 | 10 | 190 | 228 | 112 | 32 | 12 | 265 | 15 | 230 | 13 | 285 | 300 | |
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.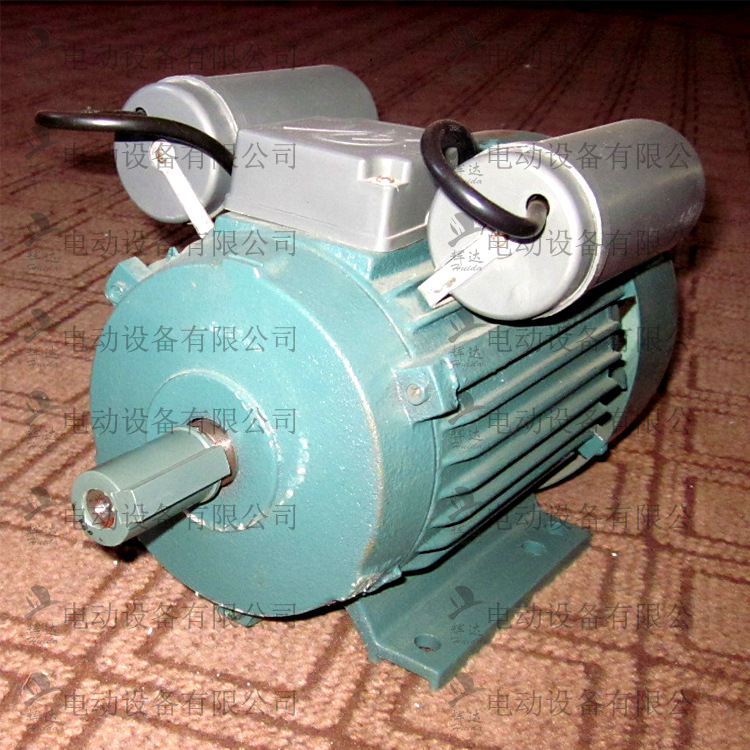
Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.
Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить
Остановить
Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя
Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
Вращающееся магнитное поле пронизывающее ротор
Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.


Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
С помощью одной фазы нельзя запустить ротор
Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
Однофазные электродвигатели 220в — самая выгодная цена в Украине!
Электродвигатели однофазные 220в Новая Каховка Херсон
Однофазные электродвигатели 220в Новая Каховка относится к асинхронным устройствам переменного тока. Они работают, когда их подключают к питанию 1-фазной сети (220/230 V при частоте 50 Гц). Этих параметров вполне хватает для генерации мощности от 0,09 кВт и до 3 Квт. В минуту однофазный двигатель может осуществлять от 1500 до 3000 оборотов.
Благодаря таким показателям однофазный асинхронный двигатель для циркулярки применяют в быту или легкопромышленной отрасли. Зачастую их используют для насосов, вентиляторов, редукторов, компрессоров, производственных станков с малой мощностью, а также различной бытовой техники.
В интернет-магазине «ПРОМЭЛЕКТРО» вы найдете качественные однофазные электродвигатели 220в цена в Новой Каховке Херсон которых вас приятно удивит. В нашем ассортименте много устройств, которые нужны, чтобы преображать электроэнергию в механическую.
Однофазный
асинхронный двигатель — характеристикаУ однофазных асинхронных двигателей особенная конструкция. На их статоре есть одна рабочая обмотка, ее нужно подключать к сети с однофазным током. Однофазный двигатель начинет функционировать благодаря тому, что вращается магнитное поле. Оно создается, когда главная обмотка вместе дополнительной работают в паре. Дополнительная — меньше по размеру, она подключается в основную сеть при использовании специальной емкости.
Данный пусковой элемент сдвинут от основной обмотки. Его активация происходит тогда, когда запускается однофазный двигатель 220 Вольт , а после этого пусковой элемент деактивируется. Фазы сдвигаются за счет резисторов или конденсаторов, которые есть в электродвигателях однофазных.
Все модели в основном обладают малой или средней мощностью. Конструкция однофазного асинхронного двигателя почти ничем не отличается от трехфазного. Среди преимуществ однофазные электродвигатели 220в — то, что у них есть короткозамкнутый ротор. Их габаритные размеры можно назвать мобильными. Но в то же время у однофазных электродвигателей не такая мощная производительность, как у трехфазных.
Решили купить однофазный двигатель 220В в Новой Каховке?
Прежде чем купить однофазный асинхронный электродвигатель в Новой Каховке , стоит многое учесть. Для начала сопоставьте его максимальные ресурсы с вашими нуждами. Проанализируйте: будет ли двигатель однофазный соответствовать целевому объекту, где его нужно применить.
Бывает, что модели однофазные электродвигатели 220в не удовлетворяет всех ожиданий. Тогда стоит рассмотреть вариант с трехфазным устройством, у которого повышенная мощность. Главное, чтобы в рабочей области был источник питания с трехфазной сетью на 380/400 V, в противном случае можно потерять производительность.
Однофазные электродвигатели 220в Новая Каховка обладают и недостатками. Например, в них нет пускового момента или его показатель слишком слабый. Причина этому то, что прибор не может создавать магнитное поле, которое вращается. Также однофазным двигателям присущи низкие показатели КПД. У них слабая способность перезагружаться и завышенные параметры кратности пускового тока.
Купить электродвигатель однофазный для циркулярки в Новой Каховке Херсонская область
Наши специалисты всегда помогут вам подобрать однофазные асинхронные двигатели для конкретных нужд. У всех устройств — продолжительный срок службы. Чтобы избежать выхода устройства из строя или поломок на объекте, где он будет установлен, важно купить однофазный электродвигатель у проверенных поставщиков.
Компания «ПРОМЭЛЕКТРО» предоставляет гарантию на свою продукцию и имеет сертификаты, которые подтверждают ее качество. Закажите на нашем сайте электродвигатели однофазные: доставка в Киев, Новую Каховку и другие города Украины — это удобно и быстро. Успехов в выборе!
[решено] — Однофазный асинхронный двигатель 220 В с медленным запуском
У меня есть настольная пила, которая приводится в движение однофазным асинхронным двигателем 220 В. мощностью 1,5 л.с. В клеммной коробке двигателя 2 конденсатора.Мотор приводит в движение пилу с помощью плоского ремня. Ремень имеет длину 60 см (2 фута) и ширину 2,5 см (1 дюйм).
Пришлось заменить мотор оригинальный.
Новый двигатель запускается так быстро, что ремень сразу же выталкивается из плоского шкива. Старый мотор заводился красиво и медленно, и ему потребовалось около 5 секунд, чтобы достичь максимальной скорости.Я не могу использовать детали от старого мотора.
Я провел несколько экспериментов со старинным вариаком и обнаружил, что если я включу пилу с напряжением около 115 вольт, она начнет плавно и медленно. Поскольку вариак стал довольно теплым и вонючим, я заменил его старым кино-трансформатором (220 В -> 115 В). Это тоже действительно очень хорошо работает, но слишком велико и тяжело, чтобы быть практичным.
Поскольку вариак стал довольно теплым и вонючим, я заменил его старым кино-трансформатором (220 В -> 115 В). Это тоже действительно очень хорошо работает, но слишком велико и тяжело, чтобы быть практичным.
Итак, теперь мне нужна большая помощь. Мой план — использовать таймер для срабатывания реле. Реле сначала подключит двигатель через трансформатор, а примерно через 3-5 секунд подключит двигатель напрямую к 220 В.Я думаю, что могу сам управлять частью таймера / реле, но моя проблема — трансформатор. Я измеряю ток, необходимый двигателю, как минимум 6А. Можно ли использовать какое-либо другое устройство / конструкцию SIMPLE вместо трансформатора для регулирования начальной скорости двигателя?
Очевидно, чем меньше крутящий момент, тем лучше ! Я долго гуглил об этом, и все говорят, что проблема с симистором — это крутящий момент, но меня не волнует крутящий момент, я просто хочу, чтобы двигатель запускался очень хорошо и медленно, пока он не наберет скорость, когда я может переключаться на прямое 220В через реле. А можно ли использовать симистор с асинхронным двигателем с 2 встроенными конденсаторами?
А можно ли использовать симистор с асинхронным двигателем с 2 встроенными конденсаторами?
Я был бы очень признателен за любую помощь, а еще лучше — за принципиальную схему того, как я могу сделать регулирующую часть. Использование трансформатора слишком громоздко (и дорого).
Спасибо
Три способа управления однофазным асинхронным двигателем
Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели.Регулирование скорости однофазных асинхронных двигателей желательно в большинстве приложений управления двигателями, поскольку оно не только обеспечивает регулируемую скорость, но также снижает потребление энергии и звуковой шум.
Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении. Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых передач, направление вращения можно изменить. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости.В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости.В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Двигатели с постоянным разделенным конденсатором (PSC) — самый популярный тип однофазных асинхронных двигателей. В этой статье будут рассмотрены различные методы и топологии приводов для управления скоростью двигателя PSC в одном и двух направлениях.
Интерфейс микроконтроллера
Микроконтроллер — это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ для управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы.PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
Наличие доступа к специализированным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления.
Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к выключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. Дополнительные каналы АЦП могут использоваться в конечном приложении для считывания различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. Д.
Входы и выходы общего назначения (I / Os) могут использоваться для сопряжения переключателей и дисплеев в приложении. Например, в приложении для холодильника эти универсальные входы / выходы могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. Д. Каналы связи, такие как I2C (TM) или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Интерфейсы неисправностей и диагностики включают в себя входные линии со специальными функциями, такими как возможность отключения ШИМ в случае катастрофических сбоев в системе.Например, в посудомоечной машине, если привод заблокирован из-за скопившихся отходов, это может помешать вращению двигателя. Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут регистрироваться и / или отображаться, или передаваться на ПК для устранения неисправностей обслуживающего персонала. Часто это предотвращает серьезные отказы и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание.
| Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. |
ШИМ — это основные периферийные устройства, используемые для управления двигателем. Используя указанные выше входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и схему вывода. К наиболее ценным функциям PWM относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краю или по центру. Выровненные по центру ШИМ имеют то преимущество, что они уменьшают электромагнитный шум (EMI), излучаемый изделием.
Вариант № 1: Однонаправленное управление
УправлениеVF в одном направлении делает топологию привода и алгоритм управления относительно простыми.Задача состоит в том, чтобы создать источник питания с переменным напряжением и частотой из источника питания с фиксированным напряжением и частотой (такого как источник питания от настенной розетки). На рисунке на странице 85 показана блок-схема этой топологии привода с тремя основными секциями построения, которые обсуждались ранее. Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, имеющиеся в наличии, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, включенным последовательно с пусковой обмоткой.В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2).
MCU, показанный на блок-схеме, имеет модуль управления мощностью PWM (PCPWM), который способен выводить до трех пар PWM с зоной нечувствительности между парами. Зона нечувствительности важна в приложении управления асинхронным двигателем, чтобы избежать перекрестной проводимости шины постоянного тока через переключатели питания, когда один выключается, а другой включается. Схема диагностики может включать в себя контроль тока двигателя, контроль напряжения на шине постоянного тока и контроль температуры на радиаторе, подключенном к переключателям питания и двигателю.
| Блок-схема топологии привода с тремя основными секциями здания. В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2). Показанный MCU имеет модуль ШИМ, который способен выводить до трех пар ШИМ с зоной нечувствительности между парами. |
| Двунаправленное управление с помощью H-моста. |
Двунаправленное управление
Большинство двигателей PSC предназначены для работы в одном направлении. Однако во многих приложениях требуется двунаправленное вращение двигателя. Исторически для достижения двунаправленного вращения использовались зубчатые передачи или внешние реле и переключатели. При использовании механических шестерен вал двигателя вращается в одном направлении, а шестерни прямого и обратного хода включаются и выключаются в соответствии с требуемым направлением. С помощью реле и переключателей полярность пусковой обмотки электрически меняется на обратную в зависимости от требуемого направления.
К сожалению, все эти компоненты увеличивают стоимость системы для базового управления включением и выключением в двух направлениях.
В этом разделе мы обсудим два метода двунаправленного управления скоростью для двигателей PSC с использованием привода на основе микроконтроллера. Обсуждаемые здесь топологии привода создают эффективные напряжения, которые приводят в действие главную обмотку и пусковую обмотку с фазовым сдвигом на 90 градусов относительно друг друга. Это позволяет разработчику системы навсегда удалить конденсатор, включенный последовательно с пусковой обмоткой, из схемы, тем самым снижая общую стоимость системы.
Вариант № 2: H-мостовой инвертор
У этого метода есть удвоитель напряжения на входе; на выходе используется H-мост или двухфазный инвертор (см. рисунок выше). К каждому полумосту подключаются один конец основной и пусковой обмоток; другие концы соединены вместе в нейтральной точке источника переменного тока, которая также служит центральной точкой для удвоителя напряжения.
Для схемы управления требуются четыре ШИМ с двумя дополнительными парами и достаточной зоной нечувствительности между дополнительными выходами.PWM0-PWM1 и PWM2-PWM3 — это пары ШИМ с зоной нечувствительности. Используя ШИМ, шина постоянного тока синтезируется для обеспечения двух синусоидальных напряжений, сдвинутых по фазе на 90 градусов, с различной амплитудой и переменной частотой в соответствии с профилем VF. Если напряжение, приложенное к основной обмотке, отстает от пусковой обмотки на 90 градусов, двигатель вращается в прямом направлении. Чтобы изменить направление вращения, напряжение, подаваемое на главную обмотку, должно опережать напряжение, подаваемое на пусковую обмотку.
| Фазовые напряжения при вращении двигателя в прямом и обратном направлении. |
Этот способ управления двигателем типа PSC с помощью H-мостового инвертора имеет следующие недостатки.
Основная и пусковая обмотки имеют разные электрические характеристики. Таким образом, ток, протекающий через каждый переключатель, неуравновешен. Это может привести к преждевременному выходу из строя коммутационных аппаратов в инверторе.
Общая точка обмоток напрямую подключена к нейтрали. Это может увеличить количество коммутационных сигналов, проникающих в основной источник питания, и может увеличить шум, излучаемый в линию.В свою очередь, это может ограничить уровень электромагнитных помех продукта, нарушая определенные цели и нормы проектирования.
Эффективное обрабатываемое постоянное напряжение относительно высокое из-за удвоения входного напряжения.
Наконец, стоимость самой схемы удвоителя напряжения высока из-за двух мощных конденсаторов большой емкости.
Лучшим решением для минимизации этих проблем было бы использование трехфазного инверторного моста, как обсуждается в следующем разделе.
Вариант № 3: Использование трехфазного инверторного моста
Входная секция заменена на стандартный диодно-мостовой выпрямитель.В выходной секции установлен трехфазный инверторный мост. Основное отличие от предыдущей схемы — способ подключения обмоток двигателя к инвертору. Один конец основной и пусковой обмоток подключены к одному полумосту каждый. Остальные концы связываем вместе и подключаем к третьему полумосту.
| Управление с помощью трехфазного инверторного моста. |
При такой топологии привода управление становится более эффективным.Однако алгоритм управления усложняется. Напряжениями обмоток, Va, Vb и Vc, следует управлять для достижения разности фаз между действующими напряжениями на основной и пусковой обмотках, чтобы иметь фазовый сдвиг на 90 градусов относительно друг друга.
Чтобы иметь одинаковые уровни напряжения и нагрузки на всех устройствах, что улучшает использование устройства и обеспечивает максимально возможное выходное напряжение для заданного напряжения на шине постоянного тока, все три фазных напряжения инвертора поддерживаются на одной и той же амплитуде, как указано в :
| Va | = | Vb | = | Vc |
Эффективное напряжение на основной и пусковой обмотках, как указано в формуле:
Vmain = Va-Vc
Vstart = Vb-Vc
Направление вращения можно легко контролировать с помощью фазового угла Vc по отношению к Va и Vb. .
На рисунках на стр. 87 показаны фазные напряжения Va, Vb и Vc, эффективные напряжения на главной обмотке (Vmain) и пусковой обмотке (Vstart) для прямого и обратного направлений соответственно.
Использование метода управления трехфазным инвертором на компрессоре мощностью 300 Вт дало экономию энергии на 30 процентов по сравнению с первыми двумя методами.
| Необходимые ресурсы микроконтроллера | ||||
|---|---|---|---|---|
| Ресурс | однонаправленный | Двунаправленный H-образный мост | Двунаправленный с трехфазным мостом | Банкноты |
| Программная память | 1.5 Кбайт | 2,0 Кбайт | 2,5 Кбайт | – |
| Память данных | ~ 20 байт | ~ 25 байт | ~ 25 байт | – |
| каналов ШИМ | 2 канала | 2 канала | 3 канала | Дополняет мертвое время |
| Таймер | 1 | 1 | 1 | 8- или 16-бит |
| Аналого-цифровой преобразователь | 3-4 канала | 3-4 канала | 3-4 канала | Ток двигателя, измерения температуры, потенциометр регулировки скорости |
| Цифровые входы / выходы | от 3 до 4 | от 3 до 4 | от 3 до 4 | Для пользовательских интерфейсов, таких как переключатели и дисплеи |
| Входы неисправностей | 1 или 2 | 1 или 2 | 1 или 2 | Для перегрузки по току / перенапряжения / перегрева и т. Д. |
| Сложность алгоритма управления | Низкая | Средний | Высокая | – |
| Сравнение затрат | ||||
| однонаправленный | Двунаправленный с Н-мостом | Двунаправленный с трехфазным мостом | ||
| Секция входного преобразователя | Low — Однофазный диодный мостовой выпрямитель | High — из-за цепи удвоителя напряжения | Low — Однофазный диодный мостовой выпрямитель | |
| Выходная секция инвертора | Низкий — Два полумоста | Средний — Два полумоста.Силовые выключатели на повышенное напряжение | High — трехфазный инвертор. Использование интегрированных силовых модулей (IPM) лучше, чем дискретных компонентов | |
| Двигатель | Medium — Требуется пусковой конденсатор | Low — Пусковой конденсатор снят с мотора | Low — Пусковой конденсатор снят с мотора | |
| Срок разработки | Короткий | Средний | длинный | |
| Общая стоимость | Низкая | Средний | Medium — Эффективный контроль при заданной стоимости | |
Еще одно преимущество использования трехфазного метода управления состоит в том, что та же самая топология приводного оборудования может использоваться для управления трехфазным асинхронным двигателем.В этом сценарии микроконтроллер должен быть перепрограммирован для вывода синусоидального напряжения с фазовым сдвигом на 120 градусов относительно друг друга, что приводит в действие трехфазный асинхронный двигатель. Это сокращает время разработки.
Однофазные асинхронные двигатели очень популярны в бытовой технике, а также в промышленных и бытовых приложениях. PSC — самый популярный тип однофазных асинхронных двигателей. Управление скоростью двигателя имеет множество преимуществ, таких как энергоэффективность, снижение слышимого шума и лучший контроль над приложением.В этой статье мы обсудили различные методы управления скоростью, которые можно использовать с двигателем PSC в однонаправленном и двунаправленном режимах. Наилучшие результаты дает управление двигателем PSC с использованием топологии трехфазного инвертора.
| |
| Фазное напряжение при вращении двигателя в прямом и обратном направлениях. |
Схема регулятора скорости трехфазного асинхронного двигателя
В этом посте мы обсуждаем создание простой схемы регулятора скорости трехфазного асинхронного двигателя, которая также может применяться для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока. .
Когда дело доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных каскадов, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. Д.
Все они используются для достижения в конечном итоге прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что в конечном итоге обеспечивает необходимое управление скоростью двигателя.
Однако мы можем поэкспериментировать и попытаться реализовать регулирование скорости трехфазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные ИС оптопары детектора перехода через нуль, силовой симистор и схему ШИМ.
Использование детектора перехода через ноль Оптопара
Благодаря серии оптопар MOC, которые сделали схемы управления симисторами чрезвычайно безопасными и простыми в настройке, а также обеспечивают беспроблемную интеграцию ШИМ для предполагаемых элементов управления.
В одном из своих предыдущих постов я обсуждал простую схему контроллера двигателя с плавным пуском с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для обеспечения соблюдения предложенной схемы регулятора скорости трехфазного асинхронного двигателя, на следующем изображении показано, как это можно сделать:
На рисунке мы видим три идентичных каскада оптопары MOC, сконфигурированных в их стандартном симисторе. режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
Три цепи MOC сконфигурированы для обработки входного трехфазного переменного тока и подачи его на подключенный асинхронный двигатель.
Вход ШИМ на стороне управления изолированными светодиодами оптического блока определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что, регулируя потенциометр ШИМ, связанный с микросхемой 555, можно эффективно управлять скоростью асинхронного двигателя.
Выход на его выводе №3 имеет переменный рабочий цикл, который, в свою очередь, соответствующим образом переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение RMS с помощью более широких PWM позволяет получить более высокую скорость двигателя, в то время как уменьшение RMS переменного тока с помощью более узких PWM производит противоположный эффект, то есть вызывает пропорциональное замедление двигателя.
Вышеупомянутые функции реализованы с большой точностью и безопасностью, поскольку ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, твердотельные реле и т. Д.
IC также обеспечивает идеально изолированную работу для каскада постоянного тока, что позволяет пользователю выполнять настройки, не опасаясь поражения электрическим током.
Этот принцип можно также эффективно использовать для управления скоростью однофазного двигателя, используя одну MOC IC вместо 3.
Конструкция фактически основана на теории пропорционального по времени симистора. Верхняя схема ШИМ IC555 может быть отрегулирована для получения 50% рабочего цикла при гораздо более высокой частоте, в то время как нижняя схема ШИМ может использоваться для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта микросхема 555 имела относительно более низкую частоту, чем верхняя схема IC 555. Это можно сделать, увеличив емкость конденсатора на выводе 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗОВЫМИ ПРОВОДАМИ МОЖЕТ Существенно улучшить ХАРАКТЕРИСТИКИ УПРАВЛЕНИЯ СКОРОСТЬЮ СИСТЕМЫ.Лист данных для MOC3061
Предполагаемая форма сигнала и управление фазой с использованием вышеуказанной концепции:
Вышеописанный метод управления трехфазным асинхронным двигателем на самом деле довольно груб, поскольку он не имеет контроля В / Гц .
Он просто использует включение / выключение сети с разной скоростью для выработки средней мощности двигателя и управления скоростью, изменяя этот средний переменный ток двигателя.
Представьте, что вы включаете / выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Вышеупомянутый принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В / Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.
Для этого мы в основном используем следующие этапы:
- Схема драйвера H-Bridge или полного моста IGBT
- Трехфазный генераторный каскад для питания полной мостовой схемы
- ШИМ-процессор В / Гц
Использование полного моста Схема управления IGBT
Если процедуры настройки вышеупомянутой конструкции на основе симистора выглядят пугающими, можно попробовать следующее управление скоростью асинхронного двигателя на основе полномостового ШИМ:
В схеме, показанной на рисунке выше, используется один полный кристалл. -мостовой драйвер IC IRS2330 (последняя версия — 6EDL04I06NT), который имеет все встроенные функции для обеспечения безопасной и безупречной работы трехфазного двигателя.
ИС требуется только синхронизированный трехфазный логический вход через его выводы HIN / LIN для генерации необходимого трехфазного колебательного выхода, который в конечном итоге используется для работы полной мостовой IGBT-сети и подключенного трехфазного двигателя.
ШИМ-инжектор с регулировкой скорости реализуется через 3 отдельных полумостовых каскада драйверов NPN / PNP, управляемых с помощью SPWM-питания от генератора ШИМ IC 555, как показано в наших предыдущих разработках. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала разберемся, как автоматическое управление В / Гц может быть достигнуто с помощью нескольких схем IC 555, как описано ниже. (Замкнутый контур) В приведенных выше разделах мы изучили конструкции, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В / Гц, если не будет следующая ШИМ процессор интегрирован с входным каналом H-Bridge PWM. Вышеупомянутая схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе №6 IC2 с помощью R4 / C3. Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 микросхемы IC2. Эти пульсации образца получаются путем преобразования трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на вывод № 5 микросхемы IC2 для необходимой обработки. Путем сравнения двух сигналов, SPWM соответствующего размера генерируется на выводе № 3 IC2, который становится управляющим ШИМ для сети H-моста. При включении питания конденсатор на выводе №5 начинает с передачи нулевого напряжения на выводе №5, что вызывает наименьшее значение SPWM в Н-мостовой схеме, которая, в свою очередь, включает асинхронный двигатель для запуска с медленным плавным пуском. По мере того, как этот конденсатор заряжается, потенциал на выводе № 5 повышается, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость. Мы также можем видеть цепь обратной связи тахометра, которая также интегрирована с контактом № 5 микросхемы IC2. Этот тахометр контролирует скорость ротора или скорость скольжения и генерирует дополнительное напряжение на выводе № 5 IC2. Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора, и в процессе она начинает набирать скорость. Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выходной сигнал SPWM, что, в свою очередь, дополнительно увеличивает скорость двигателя. Вышеупомянутая регулировка пытается поддерживать отношение В / Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет увеличиваться дальше. В этот момент скорость скольжения и скорость статора достигают установившегося состояния, и это поддерживается до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся. В случае их изменения схема процессора V / Hz снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя. Цепь тахометра также может быть дешево построена с использованием следующей простой схемы и интегрирована с описанными выше этапами схемы: В предыдущих параграфах мы поняли процесс автоматического регулирования, который может eb достигается за счет интеграции обратной связи тахометра в цепь автоматического регулируемого контроллера SPWM. Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM упасть и поддерживать правильное соотношение В / Гц. На следующей схеме поясняется каскад управления скоростью: Здесь мы можем увидеть схему трехфазного генератора, использующую микросхему IC 4035, частоту фазового сдвига которой можно изменять, изменяя тактовый вход на его выводе №6. Трехфазные сигналы подаются на логические элементы 4049 IC для создания требуемых HIN, LIN-каналов для полной мостовой драйверной сети. Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя. Это реализуется через простую нестабильную схему IC 555, которая подает регулируемую частоту на вывод № 6 микросхемы IC 4035 и позволяет регулировать частоту с помощью подключенного потенциометра 100K. Конденсатор C необходимо рассчитать таким образом, чтобы регулируемый диапазон частот соответствовал характеристикам подключенного асинхронного двигателя. Когда потенциометр частоты изменяется, эффективная частота асинхронного двигателя также изменяется, что, соответственно, изменяет скорость двигателя. Например, когда частота уменьшается, вызывает снижение скорости двигателя, что, в свою очередь, вызывает пропорциональное снижение напряжения на выходе тахометра. Это пропорциональное уменьшение выходного сигнала тахометра заставляет SPWM сужаться и тем самым пропорционально снижает выходное напряжение на двигатель. Это действие, в свою очередь, обеспечивает поддержание соотношения В / Гц при одновременном управлении скоростью асинхронного двигателя посредством управления частотой. Предупреждение. Вышеупомянутая концепция основана только на теоретических предположениях, действуйте с осторожностью. Если у вас есть какие-либо сомнения относительно конструкции контроллера скорости трехфазного асинхронного двигателя, вы можете опубликовать то же самое в своих комментариях. Что такое двигатель переменного тока? Основы электродвигателя переменного тока Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: неподвижного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу. Как работает двигатель переменного тока? В основе работы двигателя переменного тока лежат принципы магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель. Обратная связь двигателя переменного тока предусмотрено два варианта управления с обратной связью. Этими вариантами являются либо резольвер двигателя переменного тока, либо энкодер двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются. В резольверах двигателей переменного тока используется второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе в воздушном зазоре. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях. В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, пересекающего воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика. Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому им следует отдавать предпочтение в любом приложении.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться. Основные типы двигателей переменного тока Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа. Асинхронный двигатель переменного тока Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы. Синхронный двигатель переменного тока Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора. Промышленный двигатель переменного тока разработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт, работающие в трехфазном режиме при 220 или 380 В переменного тока. Где используются двигатели переменного тока? В каких отраслях используются двигатели переменного тока? Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях. Для чего используются двигатели переменного тока? Асинхронные двигатели используются во многих бытовых приборах и приложениях, в том числе: в промышленности: Как управляются двигатели переменного тока? Контроллеры переменного тока: Основы Контроллер переменного тока (иногда называемый драйвером) известен как устройство, которое контролирует скорость двигателя переменного тока.Контроллер переменного тока также может называться частотно-регулируемым приводом, приводом с регулируемой скоростью, преобразователем частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя. Компоненты контроллера переменного тока Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток, а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени. Приложения Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна. Преимущества и недостатки Преимущества Недостатки История Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости. Частотно-регулируемые приводы Основы Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков. Как работает частотно-регулируемый привод Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируя повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% своего номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением. Физические свойства Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью. Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости. Преимущества частотно-регулируемого привода — Температуру технологического процесса можно регулировать без отдельного контроллера Типы частотно-регулируемых приводов Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции ЧРП включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (ШИМ). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель. Инвертор источника тока (CSI) A (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Для поддержания правильного соотношения напряжения и частоты (Вольт / Герц) напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение двигателя.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена. Преимущества CSI • Возможность рекуперации энергии Недостатки CSI • Зубцы двигателя, когда выходная частота ШИМ ниже 6 Гц Инвертор источника напряжения (VSI) Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя. Преимущества VSI • Простая схема Недостатки VSI • Генерация больших гармоник мощности в источнике питания Широтно-импульсная модуляция (ШИМ) Частотно-регулируемый привод с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду. Преимущество ШИМ • Отсутствие зубчатого зацепления двигателя Недостатки ШИМ • Безрегенерационный режим Как выбрать двигатель переменного тока Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя. Преимущества и недостатки Преимущества двигателя переменного тока Недостатки двигателя переменного тока Поиск и устранение неисправностей двигателя переменного тока ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов AC Motor, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления. Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги: Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель. Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания. Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. По возможности смажьте подшипники, в противном случае замените двигатель полностью. Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите. Шаг 5: Двигатели переменного тока, которые пытаются запустить, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так. Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно. Сколько стоят изделия с электродвигателями переменного тока? Двигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока. Физические свойства двигателя переменного тока Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник. Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах. Статор устанавливается внутри корпуса двигателя, ротор установлен внутри, а между ними имеется зазор, отделяющий их от соприкосновения. Кожух представляет собой станину двигателя, содержащую два подшипниковых узла. Формулы для двигателя переменного тока Синхронная скорость: Частота: Количество полюсов: Мощность в лошадиных силах: Глоссарий двигателей переменного тока Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным. Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении). Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работающий за счет центробежной силы, создаваемой самим валом. Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному отношению x скорость двигателя. Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя. Асинхронный двигатель — Может упоминаться как асинхронный двигатель; Тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение. Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки. Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость. Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора. Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока. Асинхронный двигатель с разделенной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой. Крутящий момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя. Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент. Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя. Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения. Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети. Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения. Блок-схема для систем, в которых используется двигатель переменного тока Срок службы двигателя переменного тока Anaheim Automation обычно имеют срок службы около 10 000 часов работы, при условии, что двигатели работают в надлежащих условиях и в соответствии со спецификациями. Требуемое обслуживание двигателя переменного тока Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте. Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное нагревание.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы. Электропроводка двигателя переменного тока Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, входных / выходных коммуникациях и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте резких корректировок или изменений параметров системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока. Строго соблюдайте следующие правила: • Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру. ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя. ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение. Монтаж двигателя переменного тока Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать двигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен. ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм. Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и дополнительной панелью, сконструируйте дополнительную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности. Экологические аспекты двигателя переменного тока Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости. Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные степени защиты IP. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов. Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании. НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия. История двигателя переменного тока Изобретение двигателя переменного тока Эволюция электродвигателя переменного тока Принадлежности для двигателей переменного тока Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Для получения более подробной информации и дополнительных сведений см. Страницу «Аксессуары» Anaheim Automation. Тормоза двигателя переменного тока представляют собой систему 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке. Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока. Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за выделения тепла. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева. Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation. Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие. Настройка двигателя переменного тока Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его упор на исследования и разработки обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании. Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными требованиями к конструкции. Иногда настройка так же проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме. Электродвигатель переменного тока Anaheim Automation ценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат благодаря индивидуальной конструкции электродвигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям. Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной маркировки, компания гордится своей стандартной базой на складе, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением. Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии. Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, требования к маркировке или защите от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и т. Д. проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной торговой марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте. Тест двигателя переменного тока В: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation? Q: Каковы компоненты частотно-регулируемого привода? В: Какой двигатель обычно используется в частотно-регулируемом приводе? В: Каковы основные компоненты двигателя переменного тока? В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока? В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут? Часто задаваемые вопросы по двигателям переменного тока: В: Почему следует выбрать трехфазный двигатель вместо однофазного? В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом? В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU? В: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей? В: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы? В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается? В: Почему некоторые редукторы электродвигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении? Q: Подействуют ли на асинхронный двигатель переменного тока сильные колебания напряжения источника питания? Пользовательский поиск Тестировать однофазные двигатели довольно просто, если соблюдать определенные основные шаги. Цель любого теста двигателя переменного тока — определить состояние двигателя.Основные этапы проверки исправности любого двигателя приведены ниже. Проверка целостности и сопротивления заземления Проверка источника питания Проверка сопротивления обмотки двигателя переменного тока Проверка сопротивления изоляции Испытание рабочего тока Как работает схема В / Гц
Тахометр
Как реализовать контроль скорости
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Проигрыватели винила
— Вентиляторы
— Насосы
— Воздуходувки
— Конвейеры
— Компрессоры
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
— генерирует большое количество тепла и гармоник
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
• Используемые индукторы большие и дорогостоящие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
• Зубцы двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой крутящий момент (индукция)
— Отсутствие скольжения (синхронное)
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленное зажимное соединение на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
Асинхронные двигатели переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Электродвигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
A: Индукционные, синхронные и промышленные
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
A: Трехфазный асинхронный двигатель
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его работы необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться. Как тестировать и проверять однофазные электродвигатели ~ Изучение электротехники
(a) Общие проверки
(b) Проверка целостности и сопротивления заземления
(c) Проверка источника питания
(d) Проверка сопротивления обмотки двигателя переменного тока
(e) Сопротивление изоляции Тест
(f) Тест на рабочий ток
Для однофазного двигателя выполните следующие действия:
(1) Проверьте внешний вид двигателя. Убедитесь в отсутствии ожогов и повреждений корпуса, вентилятора или вала системы охлаждения.
(2) Вручную проверните вал двигателя, чтобы проверить состояние подшипников.Следите за плавным и свободным вращением вала. Если вал вращается свободно и плавно, возможно, подшипник в хорошем состоянии, в противном случае подумайте о замене.
(3) Как и при всех испытаниях и проверках, заводская табличка двигателя предоставляет ценную информацию, которая поможет установить истинное состояние двигателя. Внимательно изучите заводскую табличку.
С помощью мультиметра измерьте сопротивление между корпусом двигателя и землей.Хороший мотор должен показывать менее 0,5 Ом. Любое значение больше 0,5 Ом указывает на неисправность двигателя.
Для однофазных двигателей ожидаемое напряжение составляет около 230 В или 208 В в зависимости от того, используете ли вы систему напряжения Великобритании или Америки. Убедитесь, что на двигатель подается правильное напряжение.
Проверьте сопротивление обмотки двигателя или показания в омах с помощью мультиметра . Поскольку в однофазном двигателе три клеммы — S, C, R, измерьте сопротивление обмотки:
C к S, C к R и S к R.Измеренное значение от S до R должно быть = от C до S + C до R
Как правило, для однофазных двигателей применяется следующее:
(1) Показание сопротивления между S и R должно давать максимальное показание сопротивления
(2) Ом. показания между C и R должны давать наименьшее значение сопротивления
(3) Ом Показания между C и S должны давать некоторое промежуточное значение между значениями для S — R и C — R
. требует ремонта.
Нарушение сопротивления изоляции электродвигателя является одним из первых признаков того, что электродвигатель вот-вот выйдет из строя.Сопротивление изоляции обычно измеряется между обмотками двигателя и землей с помощью измерителя сопротивления изоляции или мегометра. Установите напряжение на измерителе сопротивления изоляции на 500 В и проверьте заземление обмоток двигателя. Проверьте C — E, S — E, R — E. Минимальное испытательное значение для исправного электродвигателя составляет не менее 1 МОм
При работающем двигателе проверьте ток полной нагрузки (FLA) с помощью подходящий измеритель или, предпочтительно, зажим на измеритель и сравните с заводской табличкой двигателя FLA .Отклонения от номинального значения FLA могут означать проблемы с тестируемым двигателем.