§76. Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Фп одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
Рис.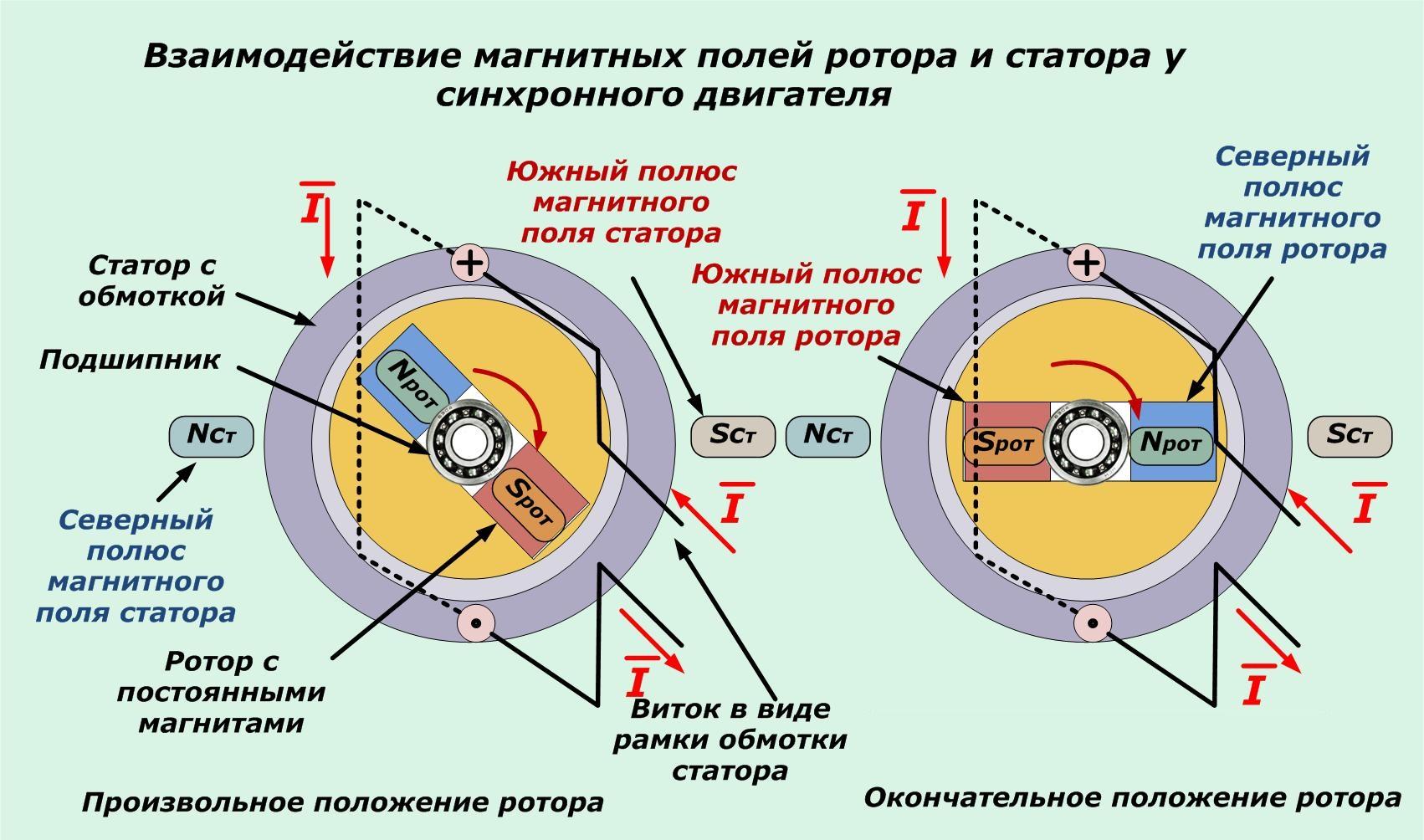 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис. 252. Листы ротора (а) и статора (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см.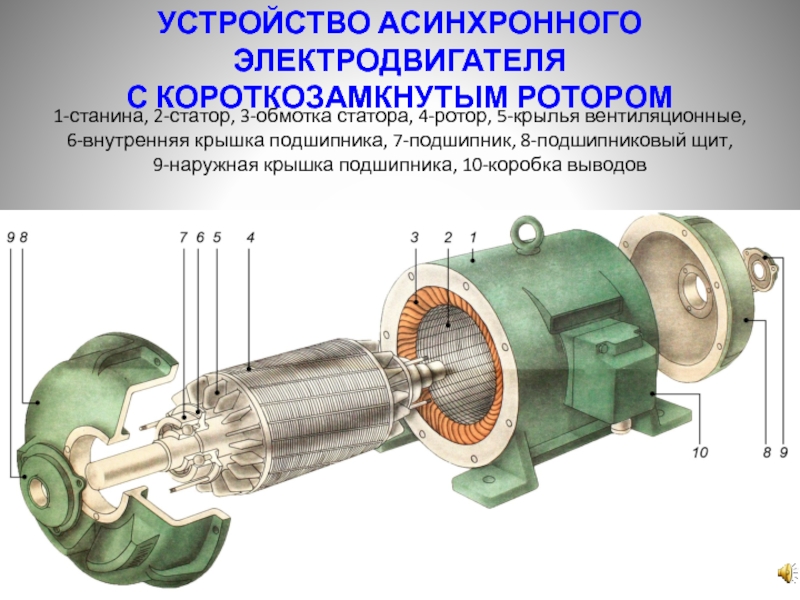 рис. 256, в).
рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.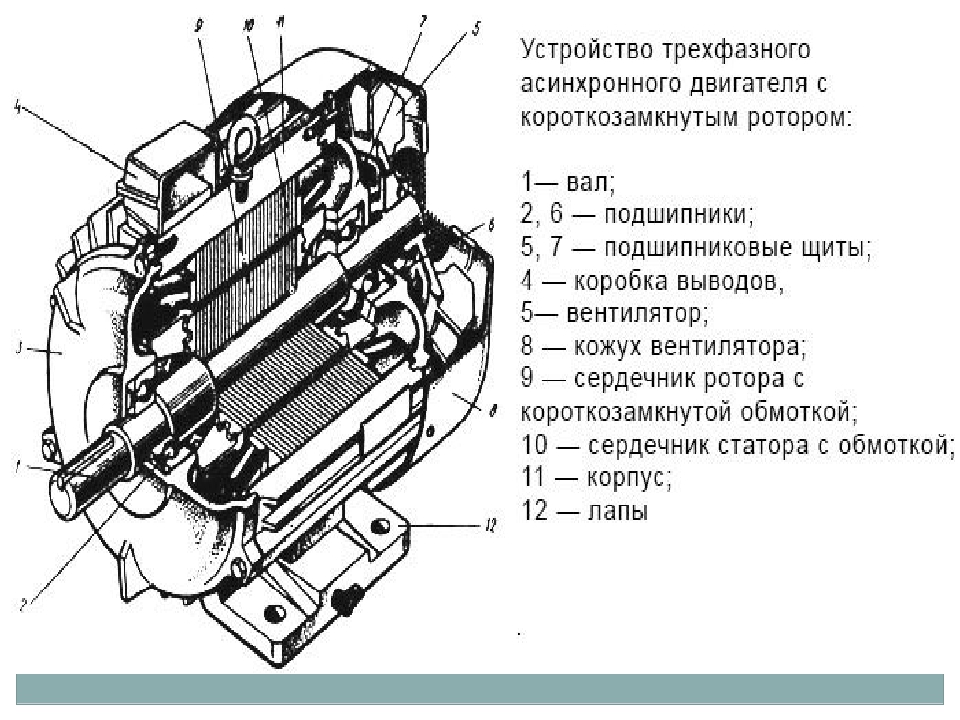
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т.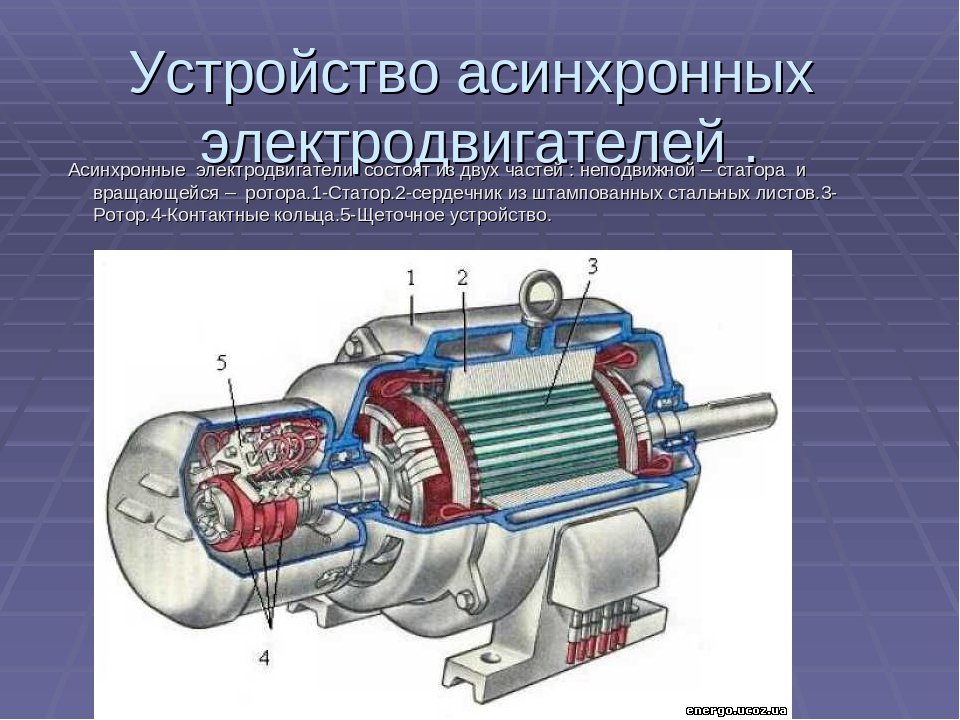 е., главным образом, через внутреннюю клетку.
е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты.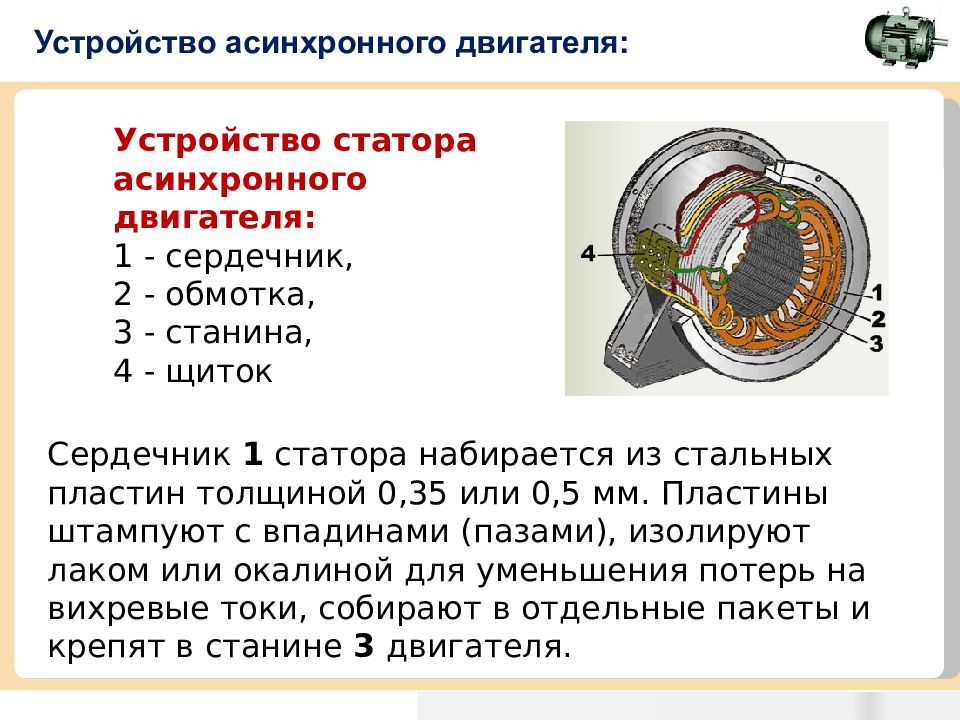 Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.

- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.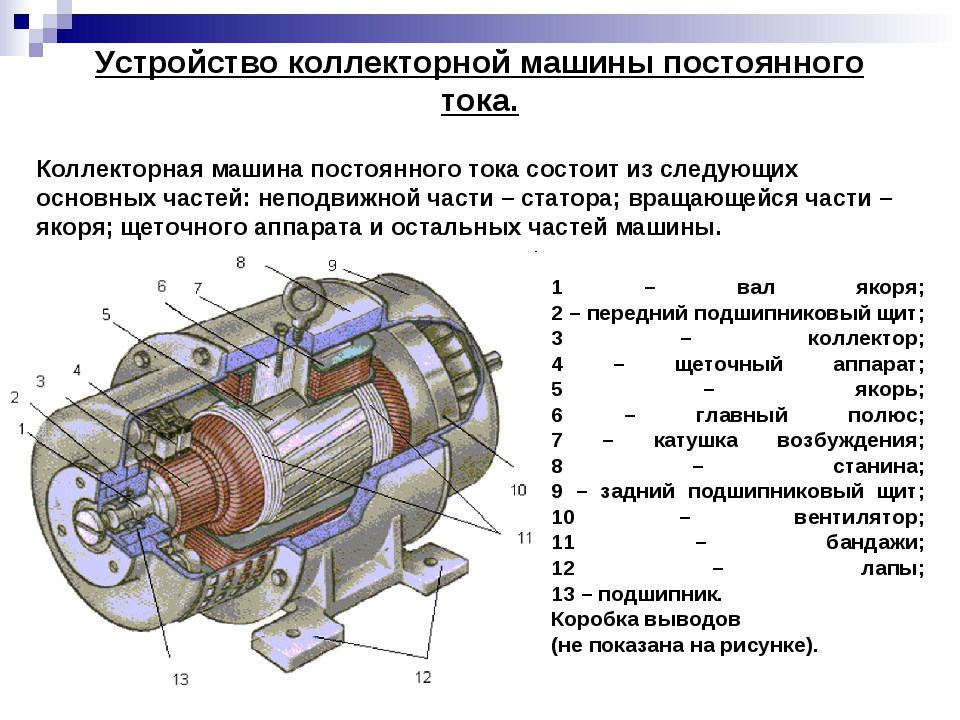
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.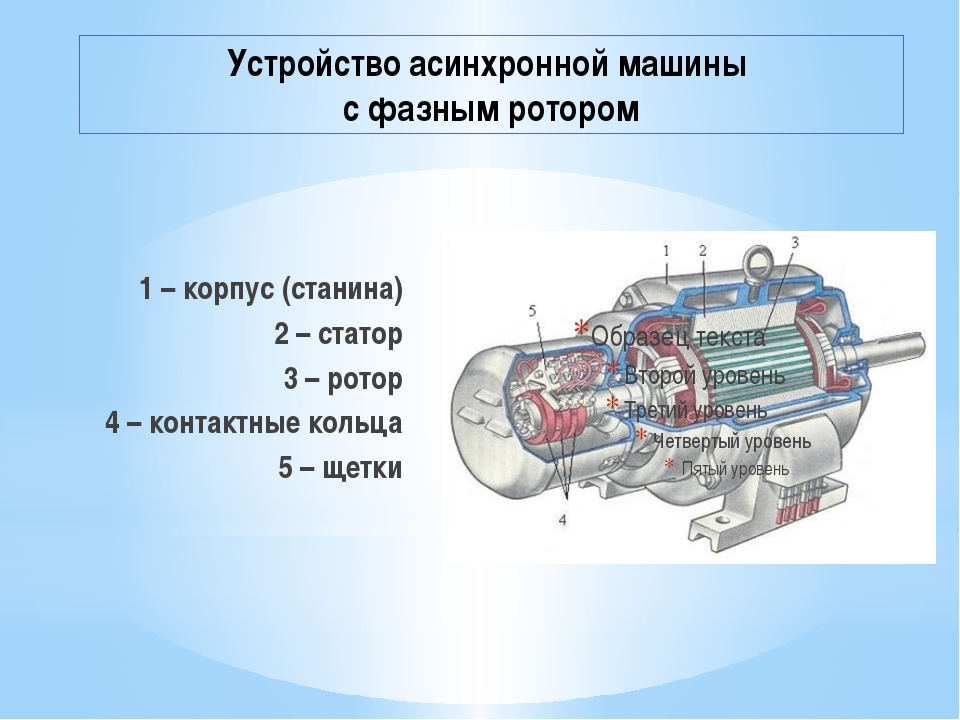
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.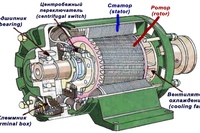
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
Устройство плавного пуска электродвигателя. Как это работает.
Устройство плавного пуска — электротехническое устройство, используемое в асинхронных электродвигателях, которое позволяет во время запуска удерживать параметры двигателя (тока, напряжения и т.д.) в в безопасных пределах. Его применение уменьшает пусковые токи, снижает вероятность перегрева двигателя, устраняет рывки в механических приводах, что, в конечном итоге, повышает срок службы электродвигателя.
НазначениеУправление процессом запуска, работы и остановки электродвигателей. Основными проблемами асинхронных электродвигателей являются:
- невозможность согласования крутящего момента двигателя с моментом нагрузки,
- высокий пусковой ток.
Во время пуска крутящий момент за доли секунды часто достигает 150-200%, что может привести к выходу из строя кинематической цепи привода. При этом стартовый ток может быть в 6-8 раз больше номинального, порождая проблемы со стабильностью питания. Устройство плавного пуска позволяют избежать этих проблем, делая разгон и торможение двигателя более медленными. Это позволяет снизить пусковые токи и избежать рывков в механической части привода или гидравлических ударов в трубах и задвижках в момент пуска и остановки двигателей.
Принцип действия устройство плавного пускаОсновной проблемой асинхронных электродвигателей является то, что момент силы, развиваемый электродвигателем, пропорционален квадрату приложенного к нему напряжения, что создаёт резкие рывки ротора при пуске и остановке двигателя, которые, в свою очередь, вызывают большой индукционный ток.
Софтстартеры могут быть как механическими, так и электрическими, либо сочетать то и другое.
Механические устройства непосредственно противодействуют резкому нарастанию оборотов двигателя, ограничивая крутящий момент. Они могут представлять собой тормозные колодки, жидкостные муфты, магнитные блокираторы, противовесы с дробью и прочее.
Данные электрические устройства позволяют постепенно повышать ток или напряжение от начального пониженного уровня (опорного напряжения) до максимального, чтобы плавно запустить и разогнать электродвигатель до его номинальных оборотов. Такие УПП обычно используют амплитудные методы управления и поэтому справляются с запуском оборудования в холостом или слабо нагруженном режиме. Более современное поколение УПП (например, устройства ЭнерджиСейвер) используют фазовые методы управления и потому способны запускать электроприводы, характеризующиеся тяжелыми пусковыми режимами «номинал в номинал». Такие УПП позволяют производить запуски чаще и имеют встроенный режим энергосбережения и коррекции коэффициента мощности.
Выбор устройства плавного пуска
При включении асинхронного двигателя в его роторе на короткое время возникает ток короткого замыкания, сила которого после набора оборотов снижается до номинального значения, соответствующего потребляемой электрической машиной мощности. Это явление усугубляется тем, что в момент разгона скачкообразно растет и крутящий момент на валу. В результате может произойти срабатывание защитных автоматических выключателей, а если они не установлены, то и выход из строя других электротехнических устройств, подключенных к той же линии. И в любом случае, даже если аварии не произошло, при пуске электромоторов отмечается повышенный расход электроэнергии. Для компенсации или полного устранения этого явления используются устройства плавного пуска (УПП).
Как реализуется плавный пуск
Чтобы плавно запустить электродвигатель и не допустить броска тока, используются два способа:
- Ограничивают ток в обмотке ротора. Для этого ее делают состоящей из трех катушек, соединенных по схеме «звезда». Их свободные концы выводят на контактные кольца (коллекторы), закрепленные на хвостовике вала. К коллектору подключают реостат, сопротивление которого в момент пуска максимальное. По мере его снижения ток ротора растет и двигатель раскручивается. Такие машины называются двигателями с фазным ротором. Они используются в крановом оборудовании и в качестве тяговых электромоторов троллейбусов, трамваев.
- Уменьшают напряжение и токи, подаваемые на статор. В свою очередь, это реализуется с помощью:
а) автотрансформатора или реостата;
б) ключевыми схемами на базе тиристоров или симисторов.
Именно ключевые схемы и являются основой построения электротехнических приборов, которые принято назвать устройствами плавного пуска или софтстартерами. Обратите внимание, что частотные преобразователи так же позволяют плавно запустить электродвигатель, но они лишь компенсируют резкое возрастание крутящего момента, не ограничивая при этом пускового тока.
Принцип работы ключевой схемы основывается на том, что тиристоры отпираются на определенное время в момент прохождения синусоидой ноля. Обычно в той части фазы, когда напряжение растет. Реже – при его падении. В результате на выходе УПП регистрируется пульсирующее напряжение, форма которого лишь приблизительно похожа на синусоиду. Амплитуда этой кривой растет по мере того, как увеличивается временной интервал, когда тиристор отперт.
Критерии выбора софтстартера
По степени снижения степени важности критерии выбора устройства располагаются в следующей последовательности:
- Мощность.
- Количество управляемых фаз.
- Обратная связь.
- Функциональность.
- Способ управления.
- Дополнительные возможности.
Мощность
Главным параметром УПП является величина Iном – сила тока, на которую рассчитаны тиристоры. Она должна быть в несколько раз больше значения силы тока, проходящего через обмотку двигателя, вышедшего на номинальные обороты. Кратность зависит от тяжести пуска. Если он легкий – металлорежущие станки, вентиляторы, насосы, то пусковой ток в три раза выше номинального. Тяжелый пуск характерен для приводов, имеющих значительный момент инерции. Таковы, например, вертикальные конвейеры, пилорамы, прессы. Ток выше номинального в пять раз. Существует и особо тяжелый пуск, который сопровождает работу поршневых насосов, центрифуг, ленточных пил… Тогда Iном софтстартера должен быть в 8-10 раз больше.
Тяжесть пуска влияет и на время его завершения. Он может длиться от десяти до сорока секунд. За это время тиристоры сильно нагреваются, поскольку рассеивают часть электрической мощности. Для повторения им надо остыть, а на это уходит столько же, сколько на рабочий цикл. Поэтому если технологический процесс требует частого включения-выключения, то выбирайте софтстартер как для тяжелого пуска. Даже если ваше устройство не нагружено и легко набирает обороты.
Количество фаз
Можно управлять одной, двумя или тремя фазами. В первом случае устройство в большей степени смягчает рост пускового момента, чем тока. Чаще всего используются двухфазные пускатели. А для случаев тяжелого и особо тяжелого пуска – трехфазные.
Обратная связь
УПП может работать по заданной программе – увеличить напряжение до номинала за указанное время. Это наиболее простое и распространенное решение. Наличие обратной связи делает процесс управления более гибким. Параметрами для нее служат сравнение напряжения и вращающего момента или фазный сдвиг между токами ротора и статора.
Функциональность
Возможность работать на разгон или торможение. Наличие дополнительного контактора, который шунтирует ключевую схему и позволяет ей остыть, а также ликвидирует несимметричность фаз из-за нарушения формы синусоиды, которое приводит к перегреву обмоток.
Способ управления
Бывает аналоговым, посредством вращения потенциометров на панели, и цифровым, с применением цифрового микроконтроллера.
Дополнительные функции
Все виды защиты, режим экономии электроэнергии, возможность пуска с рывка, работы на пониженной скорости (псевдочастотное регулирование).
Правильно подобранный УПП увеличивает вдвое рабочий ресурс электродвигателей, экономит до 30 процентов электроэнергии.
Зачем нужно устройство плавного пуска (софтстартера)
Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска (софтстартер). С чем это связано? В нашей статье мы постараемся осветить этот вопрос.
Асинхронные двигатели используются уже более ста лет, и за это время относительно мало изменилось их функционирование. Запуск этих устройств и связанные с ним проблемы хорошо известны их владельцам. Пусковые токи приводят к просадкам напряжения и перегрузкам проводки, вследствие чего:
— некоторая электротехника может самопроизвольно отключаться;
— возможен сбой оборудования и т. д.
Своевременно установленный приобретенный и подключенный софтстартер позволяет избежать лишних трат денег и головной боли.
Что такое пусковой ток
В основе принципа действия асинхронных двигателей лежит явление электромагнитной индукции. Наращивание обратной электродвижущей силы (э. д. с), которая создается путем применения изменяющегося магнитного поля во время запуска двигателя, приводит к переходным процессам в электрической системе. Этот переходной режим может повлиять на систему электропитания и другое оборудование, подключенное к нему.
Во время запуска электродвигатель разгоняется до полной скорости. Продолжительность начальных переходных процессов зависит от конструкции агрегата и характеристик нагрузки. Пусковой момент должен быть наибольшим, а пусковые токи – наименьшими. Последние влекут за собой пагубные последствия для самого агрегата, системы электроснабжения и оборудования, подключенного к нему.
В течение начального периода пусковой ток может достигать пяти-восьмикратного тока полной нагрузки. Во время пуска электродвигателя кабели вынуждены пропускать больше тока, чем во время периода стабильного состояния. Падение напряжения в системе также будет намного больше при пуске, чем во время стабильной работы – это становится особенно очевидным при запуске мощного агрегата или большого числа электродвигателей одновременно.
Способы защиты электродвигателя
Поскольку использование электродвигателей стало широко распространенным, преодоление проблем с их запуском стало проблемой. На протяжении многих лет для решения этих задач были разработано несколько методов, каждый из которых имеет свои преимущества и ограничения.
В последнее время были достигнуты значительные успехи в использовании электроники в регулировании электроэнергии для двигателей. Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска. Всё дело в том, что прибор имеет ряд особенностей.
Особенностью устройства пуска является то, что он плавно подаёт на обмотки двигателя напряжение от нуля до номинального значения, позволяя двигателю плавно разгоняться до максимальной скорости. Развиваемый электродвигателем механический момент пропорционален квадрату приложенного к нему напряжения.
В процессе пуска УПП постепенно увеличивает подаваемое напряжение, и электромотор разгоняется до номинальной скорости вращения без большого момента и пиковых скачков тока.
Виды устройств плавного пуска
На сегодняшний день для плавного запуска техники используются три типа УПП: с одной, двумя и со всеми управляемыми фазами.
Первый тип применяется для однофазного двигателя для обеспечения надежной защиты от перегрузки, перегрева и снижения влияния электромагнитных помех.
Как правило, схема второго типа помимо полупроводниковой платы управления включает в себя байпасный контактор. После того как двигатель раскрутится до номинальной скорости, байпасный контактор срабатывает и обеспечивает прямую подачу напряжения на электродвигатель.
Трехфазный тип является самым оптимальным и технически совершенным решением. Он обеспечивает ограничение тока и силы магнитного поля без перекосов по фазам.
Зачем же нужно устройство плавного пуска?
Благодаря относительно невысокой цене популярность софтстартеров набирает обороты на современном рынке промышленной и бытовой техники. УПП для асинхронного электродвигателя необходимо для продления его срока службы. Большим преимуществом софтстартера является то, что пуск осуществляется с плавным ускорением, без рывков.
Есть отличная альтернатива устройству плавного пуска. Стоимость отличается, но и функциональные возможности расширенные.
Преобразователь частоты – это решение задачи, когда требуется регулирование скорости электродвигателя и автоматизация работы технологичного оборудования через обратную связь посредством датчика. При помощи преобразователя Вы сможете решить более сложные и разносторонние вопросы по автоматизации электропривода.
Устройства плавного пуска Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Электрические двигатели: классификация, устройство, принцип работы
Электрический двигатель – специальная машина (ее еще называют электромеханическим преобразователем), с помощью которой электроэнергия преобразовывается в механическое движение.
Побочный эффект такой конвертации – выделение тепла.
При-этом современные двигатели обладают очень высоким КПД, который достигает 98%, в результате чего их использование экономически более выгодно по сравнению с двигателями внутренного сгорания. Электрические двигатели используются во всех сферах народного хозяйства, начиная от бытового применения, заканчивая военной техникой.
Электрические двигатели и их разновидности
Как известно с базового школьного курса физики, ток бывает переменным и постоянным. В бытовой электросети – переменный ток. Батарейки, аккумуляторы и другие мобильные источники питания предоставляют постоянный ток.
Электродвигатели постоянного тока характеризуются хорошими эксплуатационными и динамическими характеристиками.
Такие изделия широко используются в подъемных машинах, буровых станках, полимерном оборудовании, в некоторых агрегатах экскаваторов.
По принципу работы электродвигатели переменного тока бывают
- асинхронными;
- синхронными.
Подробное сравнение этих видов машин можно почитать тут.
Синхронные двигатели – электрические машины, где скорость вращения ротора полностью идентична частоте магнитного поля. Учитывая эту особенность, такие устройства актуальны там, где необходима стабильная высокая скорость вращения: насосы, крупные вентиляторы, генераторы, компрессоры, стиральные машины, пылесосы, практически все электроинструменты.
Особое внимание среди синхронных устройств, заслуживают шаговые двигатели. Они обладают несколькими обмотками. Такой подход позволяет с высокой точностью изменять скорость вращения таких электродвигателей.
Асинхронными двигателями называют такие машины, в которых скорость ротора отличается от частоты движения магнитного поля.
Нашли свое применение в подавляющем большинстве отраслей народного хозяйства: в приводах дымососов, транспортерах, шаровых мельницах, наждачных, сверлильных станках, в холодильном оборудовании, вентиляторах, кондиционерах, микроприводах.
Максимальная скорость вращения асинхронных установок – 3000 об/мин.
Интересное видео о двигателях смотрите ниже:
Преимущества и недостатки асинхронных двигателей
Асинхронные электродвигатели могут обладать фазным и короткозамкнутым ротором.
Короткозамкнутый ротор более распространен.
Такие двигатели обладают следующими преимуществами:
- относительно одинаковая скорость вращения при разных уровнях нагрузки;
- не боятся непродолжительных механических перегрузок;
- простая конструкция;
- несложная автоматизация и пуск;
- высокий КПД (коэффициент полезного действия).
Электродвигатели с короткозамкнутым контуром требуют большой пусковой ток.
Если невозможно реализовать выполнение этого условия, то используют устройства с фазным ротором. Они обладают такими достоинствами:
- хороший начальный вращающий момент;
- нечувствительны к кратковременным перегрузкам механической природы;
- постоянная скорость работы при наличии нагрузок;
- малый пусковой ток;
- с такими двигателями применяют автоматические пусковые устройства;
- могут в небольших пределах изменять скорость вращения.
К основным недостаткам асинхронных двигателей относят то, что изменять их скорость работы можно только посредством изменения частоты электрического тока.
Кроме того, частота вращения – относительна. Она колеблется в небольших пределах. Иногда это недопустимо.
Интересное видео об асинхронных электродвигателях смотрите ниже:
Данные электрические устройства позволяют постепенно повышать ток или напряжение от начального пониженного уровня (опорного напряжения) до максимального, чтобы плавно запустить и разогнать электродвигатель до его номинальных оборотов. Такие УПП обычно используют амплитудные методы управления и поэтому справляются с запуском оборудования в холостом или слабо нагруженном режиме. Более современное поколение УПП (например, устройства ЭнерджиСейвер) используют фазовые методы управления и потому способны запускать электроприводы, характеризующиеся тяжелыми пусковыми режимами «номинал в номинал». Такие УПП позволяют производить запуски чаще и имеют встроенный режим энергосбережения и коррекции коэффициента мощности.
Выбор устройства плавного пуска
При включении асинхронного двигателя в его роторе на короткое время возникает ток короткого замыкания, сила которого после набора оборотов снижается до номинального значения, соответствующего потребляемой электрической машиной мощности. Это явление усугубляется тем, что в момент разгона скачкообразно растет и крутящий момент на валу. В результате может произойти срабатывание защитных автоматических выключателей, а если они не установлены, то и выход из строя других электротехнических устройств, подключенных к той же линии. И в любом случае, даже если аварии не произошло, при пуске электромоторов отмечается повышенный расход электроэнергии. Для компенсации или полного устранения этого явления используются устройства плавного пуска (УПП).
Как реализуется плавный пуск
Чтобы плавно запустить электродвигатель и не допустить броска тока, используются два способа:
- Ограничивают ток в обмотке ротора. Для этого ее делают состоящей из трех катушек, соединенных по схеме «звезда». Их свободные концы выводят на контактные кольца (коллекторы), закрепленные на хвостовике вала. К коллектору подключают реостат, сопротивление которого в момент пуска максимальное. По мере его снижения ток ротора растет и двигатель раскручивается. Такие машины называются двигателями с фазным ротором. Они используются в крановом оборудовании и в качестве тяговых электромоторов троллейбусов, трамваев.
- Уменьшают напряжение и токи, подаваемые на статор. В свою очередь, это реализуется с помощью:
а) автотрансформатора или реостата;
б) ключевыми схемами на базе тиристоров или симисторов.
Именно ключевые схемы и являются основой построения электротехнических приборов, которые принято назвать устройствами плавного пуска или софтстартерами. Обратите внимание, что частотные преобразователи так же позволяют плавно запустить электродвигатель, но они лишь компенсируют резкое возрастание крутящего момента, не ограничивая при этом пускового тока.
Принцип работы ключевой схемы основывается на том, что тиристоры отпираются на определенное время в момент прохождения синусоидой ноля. Обычно в той части фазы, когда напряжение растет. Реже – при его падении. В результате на выходе УПП регистрируется пульсирующее напряжение, форма которого лишь приблизительно похожа на синусоиду. Амплитуда этой кривой растет по мере того, как увеличивается временной интервал, когда тиристор отперт.
Критерии выбора софтстартера
По степени снижения степени важности критерии выбора устройства располагаются в следующей последовательности:
- Мощность.
- Количество управляемых фаз.
- Обратная связь.
- Функциональность.
- Способ управления.
- Дополнительные возможности.
Мощность
Главным параметром УПП является величина Iном – сила тока, на которую рассчитаны тиристоры. Она должна быть в несколько раз больше значения силы тока, проходящего через обмотку двигателя, вышедшего на номинальные обороты. Кратность зависит от тяжести пуска. Если он легкий – металлорежущие станки, вентиляторы, насосы, то пусковой ток в три раза выше номинального. Тяжелый пуск характерен для приводов, имеющих значительный момент инерции. Таковы, например, вертикальные конвейеры, пилорамы, прессы. Ток выше номинального в пять раз. Существует и особо тяжелый пуск, который сопровождает работу поршневых насосов, центрифуг, ленточных пил… Тогда Iном софтстартера должен быть в 8-10 раз больше.
Тяжесть пуска влияет и на время его завершения. Он может длиться от десяти до сорока секунд. За это время тиристоры сильно нагреваются, поскольку рассеивают часть электрической мощности. Для повторения им надо остыть, а на это уходит столько же, сколько на рабочий цикл. Поэтому если технологический процесс требует частого включения-выключения, то выбирайте софтстартер как для тяжелого пуска. Даже если ваше устройство не нагружено и легко набирает обороты.
Количество фаз
Можно управлять одной, двумя или тремя фазами. В первом случае устройство в большей степени смягчает рост пускового момента, чем тока. Чаще всего используются двухфазные пускатели. А для случаев тяжелого и особо тяжелого пуска – трехфазные.
Обратная связь
УПП может работать по заданной программе – увеличить напряжение до номинала за указанное время. Это наиболее простое и распространенное решение. Наличие обратной связи делает процесс управления более гибким. Параметрами для нее служат сравнение напряжения и вращающего момента или фазный сдвиг между токами ротора и статора.
Функциональность
Возможность работать на разгон или торможение. Наличие дополнительного контактора, который шунтирует ключевую схему и позволяет ей остыть, а также ликвидирует несимметричность фаз из-за нарушения формы синусоиды, которое приводит к перегреву обмоток.
Способ управления
Бывает аналоговым, посредством вращения потенциометров на панели, и цифровым, с применением цифрового микроконтроллера.
Дополнительные функции
Все виды защиты, режим экономии электроэнергии, возможность пуска с рывка, работы на пониженной скорости (псевдочастотное регулирование).
Правильно подобранный УПП увеличивает вдвое рабочий ресурс электродвигателей, экономит до 30 процентов электроэнергии.
Зачем нужно устройство плавного пуска (софтстартера)
Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска (софтстартер). С чем это связано? В нашей статье мы постараемся осветить этот вопрос.
Асинхронные двигатели используются уже более ста лет, и за это время относительно мало изменилось их функционирование. Запуск этих устройств и связанные с ним проблемы хорошо известны их владельцам. Пусковые токи приводят к просадкам напряжения и перегрузкам проводки, вследствие чего:
— некоторая электротехника может самопроизвольно отключаться;
— возможен сбой оборудования и т. д.
Своевременно установленный приобретенный и подключенный софтстартер позволяет избежать лишних трат денег и головной боли.
Что такое пусковой ток
В основе принципа действия асинхронных двигателей лежит явление электромагнитной индукции. Наращивание обратной электродвижущей силы (э. д. с), которая создается путем применения изменяющегося магнитного поля во время запуска двигателя, приводит к переходным процессам в электрической системе. Этот переходной режим может повлиять на систему электропитания и другое оборудование, подключенное к нему.
Во время запуска электродвигатель разгоняется до полной скорости. Продолжительность начальных переходных процессов зависит от конструкции агрегата и характеристик нагрузки. Пусковой момент должен быть наибольшим, а пусковые токи – наименьшими. Последние влекут за собой пагубные последствия для самого агрегата, системы электроснабжения и оборудования, подключенного к нему.
В течение начального периода пусковой ток может достигать пяти-восьмикратного тока полной нагрузки. Во время пуска электродвигателя кабели вынуждены пропускать больше тока, чем во время периода стабильного состояния. Падение напряжения в системе также будет намного больше при пуске, чем во время стабильной работы – это становится особенно очевидным при запуске мощного агрегата или большого числа электродвигателей одновременно.
Способы защиты электродвигателя
Поскольку использование электродвигателей стало широко распространенным, преодоление проблем с их запуском стало проблемой. На протяжении многих лет для решения этих задач были разработано несколько методов, каждый из которых имеет свои преимущества и ограничения.
В последнее время были достигнуты значительные успехи в использовании электроники в регулировании электроэнергии для двигателей. Все чаще при запуске электроприводов насосов, вентиляторов применяются устройство плавного пуска. Всё дело в том, что прибор имеет ряд особенностей.
Особенностью устройства пуска является то, что он плавно подаёт на обмотки двигателя напряжение от нуля до номинального значения, позволяя двигателю плавно разгоняться до максимальной скорости. Развиваемый электродвигателем механический момент пропорционален квадрату приложенного к нему напряжения.
В процессе пуска УПП постепенно увеличивает подаваемое напряжение, и электромотор разгоняется до номинальной скорости вращения без большого момента и пиковых скачков тока.
Виды устройств плавного пуска
На сегодняшний день для плавного запуска техники используются три типа УПП: с одной, двумя и со всеми управляемыми фазами.
Первый тип применяется для однофазного двигателя для обеспечения надежной защиты от перегрузки, перегрева и снижения влияния электромагнитных помех.
Как правило, схема второго типа помимо полупроводниковой платы управления включает в себя байпасный контактор. После того как двигатель раскрутится до номинальной скорости, байпасный контактор срабатывает и обеспечивает прямую подачу напряжения на электродвигатель.
Трехфазный тип является самым оптимальным и технически совершенным решением. Он обеспечивает ограничение тока и силы магнитного поля без перекосов по фазам.
Зачем же нужно устройство плавного пуска?
Благодаря относительно невысокой цене популярность софтстартеров набирает обороты на современном рынке промышленной и бытовой техники. УПП для асинхронного электродвигателя необходимо для продления его срока службы. Большим преимуществом софтстартера является то, что пуск осуществляется с плавным ускорением, без рывков.
Есть отличная альтернатива устройству плавного пуска. Стоимость отличается, но и функциональные возможности расширенные.
Преобразователь частоты – это решение задачи, когда требуется регулирование скорости электродвигателя и автоматизация работы технологичного оборудования через обратную связь посредством датчика. При помощи преобразователя Вы сможете решить более сложные и разносторонние вопросы по автоматизации электропривода.
Устройства плавного пуска Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Электрические двигатели: классификация, устройство, принцип работы
Электрический двигатель – специальная машина (ее еще называют электромеханическим преобразователем), с помощью которой электроэнергия преобразовывается в механическое движение.
Побочный эффект такой конвертации – выделение тепла.
При-этом современные двигатели обладают очень высоким КПД, который достигает 98%, в результате чего их использование экономически более выгодно по сравнению с двигателями внутренного сгорания. Электрические двигатели используются во всех сферах народного хозяйства, начиная от бытового применения, заканчивая военной техникой.
Электрические двигатели и их разновидности
Как известно с базового школьного курса физики, ток бывает переменным и постоянным. В бытовой электросети – переменный ток. Батарейки, аккумуляторы и другие мобильные источники питания предоставляют постоянный ток.
Электродвигатели постоянного тока характеризуются хорошими эксплуатационными и динамическими характеристиками.
Такие изделия широко используются в подъемных машинах, буровых станках, полимерном оборудовании, в некоторых агрегатах экскаваторов.
По принципу работы электродвигатели переменного тока бывают
- асинхронными;
- синхронными.
Подробное сравнение этих видов машин можно почитать тут.
Синхронные двигатели – электрические машины, где скорость вращения ротора полностью идентична частоте магнитного поля. Учитывая эту особенность, такие устройства актуальны там, где необходима стабильная высокая скорость вращения: насосы, крупные вентиляторы, генераторы, компрессоры, стиральные машины, пылесосы, практически все электроинструменты.
Особое внимание среди синхронных устройств, заслуживают шаговые двигатели. Они обладают несколькими обмотками. Такой подход позволяет с высокой точностью изменять скорость вращения таких электродвигателей.
Асинхронными двигателями называют такие машины, в которых скорость ротора отличается от частоты движения магнитного поля.
Нашли свое применение в подавляющем большинстве отраслей народного хозяйства: в приводах дымососов, транспортерах, шаровых мельницах, наждачных, сверлильных станках, в холодильном оборудовании, вентиляторах, кондиционерах, микроприводах.
Максимальная скорость вращения асинхронных установок – 3000 об/мин.
Интересное видео о двигателях смотрите ниже:
Преимущества и недостатки асинхронных двигателей
Асинхронные электродвигатели могут обладать фазным и короткозамкнутым ротором.
Короткозамкнутый ротор более распространен.
Такие двигатели обладают следующими преимуществами:
- относительно одинаковая скорость вращения при разных уровнях нагрузки;
- не боятся непродолжительных механических перегрузок;
- простая конструкция;
- несложная автоматизация и пуск;
- высокий КПД (коэффициент полезного действия).
Электродвигатели с короткозамкнутым контуром требуют большой пусковой ток.
Если невозможно реализовать выполнение этого условия, то используют устройства с фазным ротором. Они обладают такими достоинствами:
- хороший начальный вращающий момент;
- нечувствительны к кратковременным перегрузкам механической природы;
- постоянная скорость работы при наличии нагрузок;
- малый пусковой ток;
- с такими двигателями применяют автоматические пусковые устройства;
- могут в небольших пределах изменять скорость вращения.
К основным недостаткам асинхронных двигателей относят то, что изменять их скорость работы можно только посредством изменения частоты электрического тока.
Кроме того, частота вращения – относительна. Она колеблется в небольших пределах. Иногда это недопустимо.
Интересное видео об асинхронных электродвигателях смотрите ниже:
Особенности работы синхронных двигателей
Все синхронные двигатели обладают такими преимуществами:
- Они не отдают и не потребляют реактивную энергию в сеть. Это позволяет уменьшить их габариты при сохранении мощности. Типичный синхронный электродвигатель меньше асинхронного.
- В сравнении с асинхронными устройствами, менее чувствительны к скачкам напряжения.
- Хорошая сопротивляемость перегрузкам.
- Такие электрические машины способны поддерживать постоянную скорость вращения, если уровень нагрузок не превышает допустимые пределы.
В любой бочке, есть ложка с дегтем. Синхронным электродвигателям присущи такие недостатки:
- сложная конструкция;
- затрудненный пуск в ход;
- довольно сложно изменять скорость вращения (посредством изменения значения частоты тока).
Сочетание всех этих особенностей делает синхронные двигатели невыгодными при мощностях до 100 Вт. А вот на более высоких уровнях производительности, синхронные машины показывают себя во всей красе.
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принцип действия асинхронного двигателя и частотных преобразователей
Асинхронный (индукционный) двигатель (АД) – устройство, преобразовывающий электрическую энергию в механическую. «Асинхронный» означает разновременный. Электродвигатели асинхронные питаются от сети переменного тока.
Особенности асинхронных двигателей
Применение
Такие электродвигатели (частотные преобразователи) не используются в сетях постоянного тока. Но они имеют широкое применение во всех отраслях народного хозяйства. По статистике, до 70% электроэнергии, которая преобразуется в механическую энергию поступательного либо вращательного движения, потребляется именно индукционными электродвигателями.
Асинхронная машина не подключается к сети постоянного тока.
Асинхронные частотные преобразователи не требуют сложного производства и просты по своей конструкции, но в тоже время очень надежны. Такие двигатели могут работать от однофазной и трехфазной сети, используя разные частоты. Преобразователи не подходят для сетей постоянного тока. Для их управления применяют сравнительно несложные схемы.
При выборе асинхронного двигателя зачастую возникают проблемы с определением:
- его мощности;
- характеристик и приемлемой схемы, с помощью которой осуществляется управление электродвигателем;
- расчетом мощности конденсаторов, которые нужны, чтобы преобразователь работал от одной фазы;
- марки и сечения провода;
- устройств защиты и управления, которыми оснащен преобразователь.
Чтобы во всем этом разобраться, необходимо знать устройство и особенности работы асинхронного агрегата. Это поможет правильно подобрать преобразователь для решения конкретной задачи.
Индукционный агрегат свое название получил благодаря тому, что магнитное поле вращается с более высокой скоростью, чем сам ротор, поэтому последний всегда пытается «догнать» скорость вращения поля.
Устройство АД
Ротор и статор – главные элементы индукционного двигателя.
Схема устройства асинхронного агрегата
Схема: вал (1), подшипники (2,6), лапы (4), крыльчатка (7), статор (10), коробка выводов (11), ротор (9), кожух вентилятора (5), щиты подшипниковые (3,8).
На рисунке представлено устройство типового агрегата. Статор АД имеет форму цилиндра. Внутренняя часть имеет размеры, обеспечивающие зазор между ротором и статором. В пазах сердечника расположены обмотки. Их оси для нормальной работы расположены относительно одна другой под углом 1200. Между собой концы обмоток собираются с помощью схемы «звезда» либо «треугольник», но это зависит непосредственно от напряжения. Ротор может быть фазным либо короткозамкнутым.
Ротор вращается по ходу движения магнитного поля.
Трехфазную обмотку устанавливают на фазный ротор, она напоминает обмотку статора. С одной стороны концы обмотки фазного ротора обычно соединяются в «звезду», а свободные концы подсоединяются к контактным кольцам. Для включения в цепь обмотки фазного ротора дополнительного сопротивления используются щетки, подключенные к кольцам. Такая конструкция не предназначена для работы в цепях постоянного тока, так как необходимое вращение обеспечивает изменение фазы.
Короткозамкнутый ротор – это сердечник, который сделан из стальных листов. Пазы в короткозамкнутом роторе заполняются расплавленным алюминием, в результате чего получаются стержни, замыкаемые накоротко торцевыми кольцами.
Таким короткозамкнутым ротором создаются условия для минимального электрического сопротивления. Эта конструкция получила название «беличья клетка» или «беличье колесо».
Конструкция «беличья клетка»
В короткозамкнутом роторе повышенной мощности пазы заполняются медью или латунью. Беличье колесо – это и есть короткозамкнутая обмотка ротора.
В зависимости от подключаемой фазы индукционный агрегат подразделяется на однофазный и трехфазный. С помощью учета данного параметра различают принцип действия асинхронного двигателя.
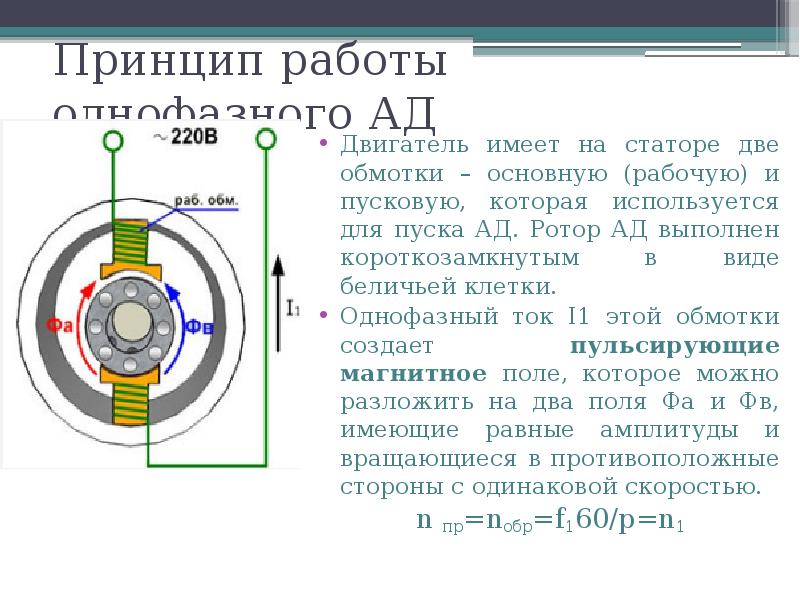
Однофазная индукционная машина
Чаще всего индукционный однофазный двигатель переменного тока устанавливается в бытовой технике, так как электроснабжение дома осуществляется от однофазной электросети. Преимуществом таких двигателей переменного тока является достаточно прочная конструкция и низкая стоимость, отсутствие сложных схем управления.
Они вполне подходят для длительной работы, так как не нуждаются в техническом обслуживании. Обычно однофазный двигатель малой мощности – до 0,5 кВт. Такие электродвигатели устанавливаются в стиральных машинах, компрессорах холодильников и другой бытовой технике, где ротором создается небольшая скорость вращения, сравнительно небольшой объем силы тока.
Схема работы однофазного двигателя малой мощности
В однофазных индукционных агрегатах на статоре установлено управление ротором от двух обмоток, которые сдвинуты одна от другой на 900 тока для образования пускового момента. Одна обмотка является пусковой, а вторая – рабочей.
Однофазные электродвигатели не подходят для сетей постоянного тока. Они характеризуются низкими энергопоказателями и малой перегрузочной способностью. Агрегаты функционируют в нормальном режиме, если не нарушен определенный диапазон частоты поля. После начала вращения устройство управления подключает рабочую обмотку. Это позволяет уменьшить потребление энергии.
В электрических приводах с обычным запуском устанавливаются, как правило, однофазные индукционные двигатели, имеющие экранированные полюса. В таком асинхронном электродвигателе в качестве вспомогательной фазы выступают короткозамкнутые витки, имеющие минимальные сопротивления, размещенные на выраженных полюсах статора.
Учитывая то, что пространственный угол, образованный витком и осями основной фазы, гораздо меньше 900, в таком электродвигателе есть эллиптическое поле. С помощью него создаются сравнительно небольшие силы, чем и объясняются невысокие рабочие и пусковые свойства индукционных электродвигателей, оснащенных экранированными полюсами с фазным включением.
Индукционные однофазные электродвигатели, имеющие короткозамкнутый ротор подразделяются на:
- с усиленным сопротивлением фазы пуска;
- агрегаты с короткозамкнутым ротором, оснащенные рабочим конденсатором;
- оснащенные фазным пусковым конденсатором;комбинированные с фазным управлением, короткозамкнутым ротором;
- комбинированные с фазным управлением, короткозамкнутым ротором;
- с экранированными полюсами.
Асинхронным однофазным машинам не рекомендуется работать на холостом ходу. Пренебрежение данным правилом приводит к сильному перегреву фазного двигателя.
Трехфазный двигатель
В трехфазной индукционной машине обмотка предназначена для образования вращающегося по кругу магнитного поля, которое проходит через короткозамкнутую обмотку ротора. Созданные с фазным управлением аппараты не применяются в цепях постоянного тока. При прохождении поля через проводники обмотки статора образуется электродвижущая сила, которая и вызывает прохождение переменного тока в обмотке, управляющей ротором, имеющим собственное магнитное поле. Данное магнитное поле при взаимодействии с фазным магнитным вращающимся полем статора вызывает вращение определенной частоты вслед за полями между ним и ротором.
Схема работы индукционного трехфазного агрегата
Данный принцип разработал академик из Франции Араго. Иными словами, если подковообразный магнит установить вблизи металлического диска свободно закрепленным на оси и вращать его с поддержанием определенной частоты оборотов, то металлический диск без дополнительного управления начнет движение за магнитом, однако скорость его вращения будет меньше, чем скорость движения магнита.
Данное явление обусловлено правилами электромагнитной индукции. Во время вращения около поверхности металлического диска полюсов магнита в контурах под полюсом образуется электродвижущая сила соответствующей частоты, и возникают токи, создающие магнитное поле металлического диска. Магнитное поле диска начинает взаимодействовать с полем полюсов вращающегося магнита, в результате чего диск «увлекается» своим магнитным полем.
Так и в асинхронном агрегате, в качестве металлического диска выступает короткозамкнутая обмотка ротора, а в качестве магнита – магнитопровод и обмотка статора.
Чтобы облегчить управление и запуск трехфазного электродвигателя при подключении к однофазной сети (переменного, а не постоянного тока), на момент пуска дополнительно устанавливается параллельно с рабочим и пусковой конденсатор. Им компенсируют отсутствие фазы и соответствующей частоты поля.
Запуск трехфазного двигателя
Двигатель в работе. Видео
О том, как работает асинхронный двигатель в режиме генератора, можно посмотреть в этом видео. Здесь представлены дельные советы по оптимизации процесса, в том числе и те, которые относятся к схемам управления фазным вращением.
Таким образом, зная особенности работы индукционной машины, с уверенностью можно сказать, что преобразование в механическую энергию электрической происходит в результате вращения вала электродвигателя (ротора).
Скорость вращения магнитного поля ротора и статора напрямую зависит от частоты питающей сети и количества пар полюсов. В случае, когда тип двигателя ограничивает число пар полюсов, то для управления изменением частоты питающей сети в больший диапазон используют частотный преобразователь.
Выше рассмотрены особенности управления фазным вращением. Также приведены отличия конструкции с короткозамкнутым минимальным ротором, который используется для уменьшения сопротивления. Следует помнить, что устройство некоторых агрегатов подразумевает возможность их применения только в цепях постоянного тока. Преобразователи с фазным вращением работают при питании переменным током.
Оцените статью:
Ассинхронные электродвигатели, описание, характеристики. Расшифровка монтажного исполнения двигателей
Асинхронные электродвигатели с короткозамкнутым ротором переменного тока предназначены для преобразования энергии переменного электрического тока в механическую энергию вращения. Благодаря простоте конструкции, высокому КПД и экономичности в производстве данное оборудование широко используется во всех сферах жизнедеятельности человека. Существует мнение, что более 80% потребляемой электроэнергии в мире, используется электродвигателями. Из недостатков следует отметить небольшой момент во время пуска и большие пусковые токи. Данные недостатки в настоящий момент компенсируются использованием устройств плавного пуска и преобразователями частоты.
Принцип действия и конструкция асинхронных электродвигателей.
Основными элементами конструктивными элементами электродвигателей являются статор и ротор. Статор это неподвижная часть двигателя с уложенными медными обмотками по углом 120 градусов. Ротор – металлический сердечник закрепленный на оси вала. Все остальные части двигателя корпус, вентилятор, подшипник и т.д. являются дополнительными конструктивными элементами, придающим электродвигателю необходимые технические характеристики по жесткости, защите от механических и атмосферных воздействий, присоединение к электрической цепи и т.д.
При прохождении через обмотки статора переменного электрического тока, благодаря явлению электромагнитной индукции, внутри статора создается вращающееся магнитное поле. В роторе под воздействием магнитного поля также наводится электрический ток, создающий в свою очередь магнитное поле, которое начинает взаимодействовать с магнитным полем статора, (вращаться вместе с ним) и соответственно приводя в движение сам ротор. Так как частота вращения ротора меньше частоты вращения магнитного поля статора (ротор с учетом приложенной к нему нагрузки «скользит»), то данный вид двигателей называется асинхронным.
Управление и защита асинхронных электродвигателей.
С помощью магнитных пускателей — при подаче напряжение силовые контакты контакторов замыкаются, и двигатель начинает работать. Для снижения пусковые токов двигатель зачастую управляют с помощью пускателей «звезда треугольник»
Также для снижения пусковых токов и обеспечения плавного пуска и останова двигателей используют софтстартеры.
Если же необходимо управлять частотой вращения двигателя или автоматизировать процесс его работы, то для этой цели используют преобразователи частоты.
Для предотвращения выхода из строя электродвигателей из за перегрузки или заклинивания в питающую цепь обычно устанавливают автоматы защиты двигателей или тепловые реле. Для защиты от скачков напряжения и обрыва или перекоса фаз устанавливают трехфазные реле защиты электродвигателей. Особенно хорошо себя зарекомендовало универсальное устройство защиты двигателей УБЗ 301 производства Новатек Электро.
Наша компания производит типовые щиты управления двигателями РУСМ и Я5000
Основные технические характеристики и условиям эксплуатации асинхронных электродвигателей.
- Мощность – величина, характеризующая работу, которую может совершить электродвигатель в единицу времени.
- Количество полюсов – количество обмоток, расположенных внутри статора. Если в статоре находится три обмотки – двигатель называется двухполюсный, 6 обмоток — четырехполюсный, 9 обмоток – шестиполюсный. Количество полюсов двигателя напрямую влияет на частоту вращения согласно формуле
N1=60F/p*S,
где N-частота вращения, F частота электрического тока, Р – количество полюсов, S коэффициент скольжения. - Частота вращения – величина показывающая количество оборотов в минуту
- Высота двигателя (габарит) – расстояние в мм от уровня установки двигателя на лапах до середины вала.
- Степень защиты – условное обозначение защиты внутреннего механизма проникновения внутрь пыли и влаги. По умолчанию большинство двигателей в настоящий момент изготавливаются со степенью защиты IP55
- Климатические исполнение и категория размещения – условия, к которых должен использоваться электродвигатель согласно ГОСТ 15150-69. ПО умолчанию имеют У2 (в районах с умеренным климатом в помещениях с навесом без отопления.)
- Напряжение электродвигателей и схемы присоединения. Согласно ГОСТ стандартные напряжение двигателей -220,380,660 В присоединением звезда или треугольник. При присоединении «звездой» концы обмоток соединены в единую точку, при присоединении в треугольник, начало каждой фазы соединяется с концом следующей фазы.
- Монтажное исполнение — способ установки и присоединения. Согласно ГОСТ 2479-79 существует следующее стандартное обозначение установки двигателя IM XXXX
- X1 тип монтажного исполнения
- 1 «лапы» корпус двигателя имеет опоры для установки и крепления
- 2 «комби» двигатель имеет опоры для крепления на поверхности и фланец для крепления к механизму со стороны вала
- 3 «фланец» корпус имеет только фланец для крепления к механизму (в основном подобным вид монтажного исполнения используется в насосном или вентиляционном оборудовании)
- X2 габарит фланца
- 0 стандартный габарит
- 6 уменьшенный габарит
- Х3 способ установки двигателя в пространстве. В настоящий момент большинство двигателей могут быть установлены в любой плоскости, обозначается цифрой «8»
- Х4 количество концов вала
- 1 конец вала
- 2 2 конца вала.
- X1 тип монтажного исполнения
Специсполнения общепромышленных асинхронных электродвигателей
- Однофазные – питание от однофазной сети переменного тока, в обозначении после название серии стоит буква Е (АИРЕ, АДМЕ)
- С повышенным скольжением – в обозначении обычно указывается буква C (АИРС, АДМС, АДС)
- С встроенным тормозом – в обозначении указывается буква Е или Е2 после габарита (АИР90L2Е). Е встроенный тормоз, Е 2-тормоз с ручным растормаживающим устройством
- Многоскоростные электродвигатели в обозначении указываются несколько перечень подключаемых полюсов 6/4/2
- С температурным датчиком – Т,Б.
Российские производители асинхронных общепромышленных электродвигателей.
- ОАО «Уралэлектро» производит серии АДМ, АДММ.
- ОАО «Элдин» производит серии АИР, А
- ОАО «Сибэлектромотор» производит серии АД
- Марки остальных серий – это Украина, Китай и Белоруссия.
Каков принцип электродвигателя?
Все мы слышали об электродвигателях, но всегда возникал вопрос: «Каков принцип электродвигателя»? Электродвигатель — это устройство, преобразующее электрическую энергию в механическую. В основном существует три типа электродвигателей.
- Двигатель постоянного тока.
- Асинхронный двигатель.
- Синхронный двигатель.
Все эти двигатели работают по более или менее одинаковому принципу. Работа электродвигателя в основном зависит от взаимодействия магнитного поля с током.
Принцип действия электродвигателя: движение электродвигателя за счет электромагнетизма
Основная идея электродвигателя действительно проста: вы помещаете в него электричество на одном конце, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять какой-либо машиной. Как это работает на практике? Как именно преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, нам нужно вернуться почти на 200 лет назад.
Предположим, вы берете кусок обычного провода, делаете из него большую петлю и прокладываете его между полюсами мощного постоянного подковообразного магнита.Теперь, если вы подключите два конца провода к батарее, провод ненадолго подпрыгнет. Удивительно, когда видишь это впервые. Это похоже на волшебство! Но есть совершенно научное объяснение .
Когда электрический ток начинает течь по проводу, он создает вокруг него магнитное поле. Если вы поместите провод рядом с постоянным магнитом, это временное магнитное поле будет взаимодействовать с полем постоянного магнита. Вы знаете, что два расположенных рядом магнита либо притягиваются, либо отталкиваются.Точно так же временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнита, и это то, что заставляет провод подпрыгивать.
Принцип действия электродвигателя: правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобную мнемонику (вспомогательное средство для запоминания), называемую правилом левой руки Флеминга (иногда называемым правилом моторики).
Вытяните большой, указательный и второй пальцы левой руки так, чтобы все три были под прямым углом.Если вы укажете пальцем C в направлении тока C (который течет от положительного к отрицательному полюсу батареи), а первый палец F — в направлении поля F (который течет от северного полюса магнита к южному), ваш thu M b покажет направление, в котором движется провод M .
Это…
- F Первый палец = F ield
- Se C нижний палец = C текущий
- Чт M b = M otion
Принцип действия электродвигателя: Принцип работы электродвигателя
Теоретически предположим, что мы сгибаем наш провод в квадратную U-образную петлю, так что фактически через магнитное поле проходят два параллельных провода.Один из них отводит электрический ток от нас по проводу, а другой возвращает ток обратно. Поскольку ток течет в проводах в противоположных направлениях, правило левой руки Флеминга говорит нам, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включаем электричество, один из проводов будет двигаться вверх, а другой — вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно — и мы были бы на пути к созданию электродвигателя.Но этого не может произойти с нашей нынешней настройкой: провода быстро запутаются. Более того, если бы катушка могла вращаться достаточно далеко, произошло бы кое-что еще.
Когда катушка достигает вертикального положения, она переворачивается, поэтому электрический ток течет через нее в противоположном направлении. Теперь силы на каждой стороне катушки меняются местами. Вместо того, чтобы постоянно вращаться в одном и том же направлении, он движется назад в том направлении, откуда только что пришел! Представьте себе электропоезд с таким двигателем: он продолжает двигаться вперед и назад на месте, фактически никуда не уезжая.
На практике есть два способа решить эту проблему. Один из них — использовать электрический ток, который периодически меняет направление, известный как переменный ток (AC). В небольших двигателях с батарейным питанием, которые мы используем дома, лучшее решение — добавить на концы катушки компонент, называемый коммутатором.
Не беспокойтесь о бессмысленном техническом названии: это немного старомодное слово «коммутация» немного похоже на слово «коммутируют». Это просто означает движение вперед и назад так же, как поездка на работу означает движение туда и обратно.В своей простейшей форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины, и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждой половине коммутатора.
Электрический ток от аккумуляторной батареи подключается к электрическим клеммам двигателя. Они подают электроэнергию в коммутатор через пару незакрепленных соединителей, называемых щетками, сделанных либо из кусочков графита (мягкий углерод, похожий на «грифель» карандаша), либо из тонких кусков упругого металла, который (как следует из названия) «задевает» коммутатор.Когда коммутатор установлен, при прохождении электричества по цепи катушка будет постоянно вращаться в одном и том же направлении.
Такой простой экспериментальный двигатель, как этот, не способен развивать большую мощность. Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки.
На практике двигатель также имеет постоянный магнит, изогнутый в форме круга, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью, и это называется ротором. Ротор также включает в себя коммутатор.
Вы можете посмотреть здесь, чтобы получить более наглядное представление о принципе работы электродвигателей.
Подробнее о Linquip
Простое руководство по эффективности двигателя: что это такое и что делатьПринцип работы электродвигателя: работа двигателей постоянного тока
Принцип работы двигателя постоянного тока в основном зависит от правила левой руки Флеминга.В базовом двигателе постоянного тока между магнитными полюсами размещен якорь. Если обмотка якоря питается от внешнего источника постоянного тока, ток начинает течь по проводникам якоря. Поскольку проводники проводят ток внутри магнитного поля, они испытывают силу, которая стремится вращать якорь.
Предположим, что проводники якоря под N полюсами полевого магнита проводят ток вниз (крестики), а проводники под S полюсами проводят ток вверх (точки).Применяя правило левой руки Флеминга, можно определить направление силы F, испытываемой проводником под N полюсами, и силу, испытываемую проводниками под S-полюсами. Обнаружено, что в любой момент силы, действующие на проводники, имеют такое направление, что они стремятся вращать якорь.
Опять же, из-за этого вращения проводники под N-полюсами попадают под S-полюс, а проводники под S-полюсами попадают под N-полюс. В то время как проводники идут от N-полюса к S-полюсу и S-полюса к N-полюсу, направление тока через них меняется на противоположное с помощью коммутатора.
Из-за этого реверсирования тока все проводники проходят под N-полюсами, переносят ток в нисходящем направлении, а все проводники, проходящие под S-полюсами, переносят ток в восходящем направлении, как показано на рисунке. Следовательно, каждый проводник находится под N-полюсом, испытывающим силу в одном и том же направлении, и то же самое верно для проводников, проходящих под S-полюсами. Это явление помогает развивать постоянный и однонаправленный крутящий момент.
Принцип работы электродвигателя: работа асинхронных двигателей
Работа электродвигателя в случае асинхронного двигателя немного отличается от электродвигателя постоянного тока.В однофазном асинхронном двигателе, когда на обмотку статора подается однофазное питание, создается пульсирующее магнитное поле, а в трехфазном асинхронном двигателе, когда трехфазное питание подается на трехфазную обмотку статора, возникает вращающееся магнитное поле. производится.
Ротор асинхронного двигателя может быть с обмоткой или с короткозамкнутым ротором. Каким бы ни был тип ротора, проводники на нем закорочены на концах, образуя замкнутый контур. Из-за вращающегося магнитного поля поток проходит через воздушный зазор между ротором и статором, проходит мимо поверхности ротора и, таким образом, разрезает проводник ротора.
Следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках замкнутого ротора будет циркулировать индуцированный ток. Величина наведенного тока пропорциональна скорости изменения магнитной связи во времени. Опять же, эта скорость изменения магнитной связи пропорциональна относительной скорости между ротором и вращающимся магнитным полем. Согласно закону Ленца, ротор будет пытаться уменьшить все причины возникновения в нем тока. Следовательно, ротор вращается и пытается достичь скорости вращающегося магнитного поля, чтобы уменьшить относительную скорость между ротором и вращающимся магнитным полем.
Принцип работы электродвигателя: работа синхронных двигателей
В синхронном двигателе, когда на неподвижную трехфазную обмотку статора подается сбалансированное трехфазное питание, создается вращающееся магнитное поле, которое вращается с синхронной скоростью. Теперь, если внутри этого вращающегося магнитного поля поместить электромагнит, он будет магнитно заблокирован с вращающимся магнитным полем, и первый будет вращаться вместе с вращающимся магнитным полем с той же скоростью, что и с синхронной скоростью.
Как работает мотор электромобиля
Типы электродвигателейВ автомобильной промышленности существуют два типа двигателей переменного тока: синхронные и асинхронные. Когда дело доходит до электромобиля, у синхронных и асинхронных двигателей есть свои сильные стороны — один не обязательно «лучше» другого.
Двигатели синхронные и асинхронныеАсинхронный двигатель, также называемый асинхронным двигателем, основан на статоре с электрическим приводом для создания вращающегося магнитного поля.Затем это влечет ротор в бесконечную погоню, как если бы он безуспешно пытался догнать магнитное поле. Асинхронный двигатель часто используется в электромобилях, которые в основном используются для движения на повышенных скоростях в течение длительных периодов времени.
В синхронном двигателе ротор сам действует как электромагнит, активно участвуя в создании магнитного поля. Таким образом, его скорость вращения прямо пропорциональна частоте тока, который питает двигатель.Это делает синхронный двигатель идеальным для городского движения, которое обычно требует регулярной остановки и запуска на низких скоростях.
И синхронные, и асинхронные двигатели работают в обратном порядке, что означает, что они могут преобразовывать механическую энергию в электричество во время замедления. Это принцип рекуперативного торможения, который исходит от генератора.
Детали электродвигателейДавайте теперь подробнее рассмотрим некоторые из различных частей двигателя электромобиля: от магнитов электродвигателей или синхронных двигателей с внешним возбуждением (EESM) до силового агрегата в целом.
Постоянные магниты
В некоторых синхронных двигателях в качестве ротора используется двигатель с постоянными магнитами. Эти постоянные магниты встроены в стальной ротор, создавая постоянное магнитное поле. Преимущество постоянного электромотора в том, что он работает без источника питания, но требует использования металлов или сплавов, таких как неодим или диспрозий. Эти «редкоземельные элементы» являются ферромагнитными, что означает, что они могут быть намагничены, чтобы стать постоянными магнитами.Они используются в различных промышленных целях: от ветряных генераторов, аккумуляторных инструментов и наушников до велосипедных динамо-машин и… тяговых двигателей для некоторых электромобилей!
Проблема в том, что цены на эти «редкие земли» очень волатильны. Несмотря на свое название, на самом деле они не обязательно такие редкие, но встречаются почти исключительно в Китае, который, следовательно, имеет квазимонополию на их производство, продажу и распространение. Это объясняет, почему производители упорно трудятся над поиском альтернативных решений для двигателей электромобилей.
Синхронные двигатели с внешним возбуждениемОдно из этих решений, которое Renault использовало для New ZOE, предполагает создание магнита электродвигателя из медной катушки. Это требует более сложного производственного процесса, но позволяет избежать проблем с питанием при сохранении отличного соотношения между массой двигателя и передаваемым крутящим моментом.
Гийом Фори, руководитель отдела проектирования завода Renault Cléon во Франции, дает представление о сложности и изобретательности двигателя New ZOE: «Производство EESM требует специальных процессов намотки катушек и пропитки.Ограничения ожидаемых характеристик продукта, цель снижения отношения веса к мощности и высокая скорость производства требуют от нас эффективного использования самых современных технологий для выполнения этих процессов ».
ЭлектротрансмиссияВ электромобиле двигатель, состоящий из ротора и статора, является частью более крупного блока, электрической трансмиссии, ансамбля, который заставляет электродвигатель работать.
Также в этом устройстве силовой электронный контроллер (PEC) объединяет всю силовую электронику, отвечающую за управление питанием двигателя и зарядку аккумулятора.Наконец, он включает в себя редукторный двигатель, часть, отвечающую за регулировку крутящего момента и скорости вращения, передаваемых двигателем на колеса.
Вместе эти элементы обеспечивают плавную и эффективную работу электродвигателя. И результат? Ваш электромобиль бесшумный, надежный, менее дорогой и приятный в управлении!
Авторские права: Pagecran
Принцип электродвигателя — HiSoUR — Hi So You Are
🔊 АудиочтениеЭлектродвигатель — это электромеханический преобразователь (электрическая машина), преобразующий электрическую энергию в механическую.В обычных электродвигателях генерируются магнитные поля в катушках с токонесущими проводниками, силы взаимного притяжения и отталкивания реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для поступательных движений (линейный привод). Электродвигатели используются для привода многих видов оборудования, машин и транспортных средств.
Принцип действия
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую. Средством преобразования энергии в электродвигателях является магнитное поле. Существуют разные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Фундаментальный принцип, который описывает, как сила вызывается взаимодействием точечного электрического заряда q в электрическом и магнитном полях, — это закон Лоренца:
где:
q: точечный электрический заряд
E: электрическое поле
v: скорость частицы
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E.Это кулоновская сила, которая действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости груза. Обычно в движении находится много грузов, поэтому выражение удобно переписать в терминах плотности заряда Fv (сила на единицу объема):
Для продукта это известно как плотность тока J (ампер на квадратный метр):
Тогда полученное выражение описывает силу, создаваемую взаимодействием тока с магнитным полем:
Это основной принцип, объясняющий, как возникают силы в электромеханических системах, таких как электродвигатели.Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это, по сути, любой электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного железнодорожного вагона контролируется рельсом.Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Основная цель подавляющего большинства электродвигателей в мире — электромагнитное возбуждение относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила проводника обмотки может быть просто выражена как:
или более широко, для работы с проводниками любой геометрии:
В наиболее общих подходах к вычислению сил в двигателях используются тензоры.
Мощность
Где об / мин — частота вращения вала, а T — крутящий момент, механическая выходная мощность двигателя Pem определяется выражением
в британских единицах с T, выраженным в фут-фунтах,
(лошадиные силы), и,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и T, выраженным в ньютон-метрах,
(Вт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
(Вт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта выражается следующим образом:
, где
Rr — сопротивление ротора
I r 2 — квадрат индуцированного тока в роторе
s — скольжение двигателя; я.е., разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Задний ЭДС
Поскольку обмотки якоря двигателя постоянного тока или универсального двигателя движутся через магнитное поле, в них возникает индуцированное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Обратная ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках.Это обеспечивает основной механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате возникает ЭДС нижней части спины, и больше тока потребляется от источника питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для уравновешивания новой нагрузки.
В машинах переменного тока иногда полезно учитывать источник обратной ЭДС внутри машины; Например, это особенно важно при точном регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также аэродинамическими потерями, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искрообразовании в механических коммутаторах и электронных коммутаторах, а также при рассеивании тепла.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую:
,
, где — эффективность преобразования энергии, — входная электрическая мощность и — механическая выходная мощность:
где — входное напряжение, — входной ток, T — выходной крутящий момент и — выходная угловая скорость.Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД.
Фактор качества
Эрик Лейтуэйт предложил метрику для определения «качества» электродвигателя:
Где:
— коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)
— площади поперечного сечения магнитной и электрической цепи
— длины магнитной и электрической цепей
— проницаемость сердечника
— угловая частота двигатель приводится в движение под углом
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям без ПМ.
Рабочие параметры
Допустимый крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они были установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть вычислен как интеграл всех векторов силы, умноженных на радиус каждого вектора.Ток, протекающий в обмотке, создает поля, и для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это затрудняет расчет, но компьютер может выполнить множество необходимых расчетов.
Как только это будет сделано, число, связывающее ток с крутящим моментом, можно использовать в качестве полезного параметра для выбора двигателя. Максимальный крутящий момент двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока не будут преобладать тепловые соображения.
При оптимальном проектировании в пределах заданного ограничения по насыщению сердечника и для заданного активного тока (т. Е. Тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности магнитного потока в воздушном зазоре, все категории электрических двигатели или генераторы будут демонстрировать практически одинаковый максимальный постоянный крутящий момент на валу (то есть рабочий крутящий момент) в пределах заданной области воздушного зазора с пазами обмотки и глубиной задней части, которая определяет физический размер электромагнитного сердечника.Для некоторых приложений требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность выдерживать скачки крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Способность к скачкам крутящего момента не следует путать с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения.Ослабление поля выполняется, когда максимальная скорость не может быть достигнута путем увеличения приложенного напряжения. Это относится только к двигателям с полями, управляемыми током, и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без трансформаторной топологии схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимальный расчетный крутящий момент, без насыщения магнитного сердечника и исключения любого увеличения тока как бесполезного. Кроме того, узел постоянного магнита PMSM может быть непоправимо поврежден, если будут предприняты попытки увеличения крутящего момента, превышающего максимально допустимый рабочий крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как асинхронные машины, индукционные электрические машины с двойным питанием, а также асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, потому что наведенный ЭДС активный ток на обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника трансформатора, что в противном случае привело бы к насыщению сердечника.
Электрические машины, основанные на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т.е.е., реальный) ток. Тем не менее, всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент, возможны.
Бесщеточная машина с синхронным двойным питанием с фазным ротором (BWRSDF) — единственная электрическая машина с действительно двухпортовой топологией трансформаторной схемы (то есть, оба порта возбуждаются независимо без короткозамкнутого порта). Топология схемы с двумя портами трансформатора, как известно, нестабильна и требует многофазного узла контактного кольца-щетки для передачи ограниченной мощности на обмотку ротора.Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время движения или генерации с одновременной подачей бесщеточной энергии на обмотку ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и могут быть реализованы всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины.Были рассчитаны всплески крутящего момента, превышающие рабочий крутящий момент в восемь раз.
Плотность постоянного крутящего момента
Плотность постоянного крутящего момента обычных электрических машин определяется размером области воздушного зазора и глубиной задней части, которые определяются номинальной мощностью комплекта обмотки якоря, скоростью машины, и достижимая магнитная индукция в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, постоянная плотность крутящего момента практически одинакова для электрических машин с оптимально спроектированными наборами обмоток якоря.Постоянная плотность крутящего момента относится к способу охлаждения и допустимому периоду эксплуатации до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM — бесщеточный переменный ток, токопроводимость 180 ° | 1,0 |
| SPM — бесщеточный переменный ток, токопроводимость 120 ° | 0.9-1,15 |
| ИМ, асинхронная машина | 0,7–1,0 |
| IPM, машина с внутренним постоянным магнитом | 0,6-0,8 |
| VRM, машина двойного сопротивления | 0,7–1,0 |
где — удельная плотность крутящего момента нормирована на 1,0 для SPM — бесщеточный переменный ток, токопроводимость 180 °, SPM — машина с поверхностным постоянным магнитом.
Плотность крутящего момента для электродвигателей с жидкостным охлаждением примерно в четыре раза больше, чем для электродвигателей с воздушным охлаждением.
Источник, сравнивающий постоянный ток (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и реактивные реактивные двигатели (SRM), показал:
| Характеристика | постоянного тока | IM | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Удельная мощность | 3 | 4 | 5 | 3.5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Постоянная плотность мощности
Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента и диапазона скорости постоянного крутящего момента электрической машины.
Специальные магнитные двигатели
Поворотный
Двигатель с ротором без сердечника или без сердечника
В принципе, ни один из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора действительно вращались.Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта — двигатель постоянного тока без сердечника или железа, специализированная форма двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, содержащей только магнитный провод и связующий материал.Ротор может помещаться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во второй конструкции корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитомягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для магнитного потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловой КПД двигателей еще на стадии проектирования.
Среди этих типов есть типы дискового ротора, более подробно описанные в следующем разделе.
Виброзвонок сотовых телефонов иногда генерируется крошечными цилиндрическими типами постоянного магнита, но есть также дискообразные типы, которые имеют тонкий многополярный дисковый магнит поля и намеренно несбалансированную конструкцию ротора из формованного пластика с двумя соединенными катушками без сердечника. . Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и катушки, размещенной между полюсами тонких постоянных магнитов с высокой магнитной индукцией.Это быстрые позиционеры головки для жестких дисков («жестких дисков»). Хотя современный дизайн значительно отличается от громкоговорителей, он все еще свободно (и неправильно) называется структурой «звуковой катушки», потому что некоторые более ранние головки жестких дисков двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Двигатель с цилиндрическим или осевым ротором
Якорь с печатным рисунком или двигатель с осевым ротором имеет обмотки в форме диска, перемещающегося между массивами магнитов с большим магнитным потоком.Магниты расположены по кругу напротив ротора с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля. С момента своего создания у технологии было много торговых марок, таких как ServoDisc.
Якорь с печатным рисунком (первоначально сформированный на печатной плате) в двигателе с печатным рисунком якоря изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитных материалов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора.Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию очень компактной.
Альтернативный метод производства заключается в использовании намотанного медного провода, уложенного плоско с центральным обычным коммутатором, в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это эпоксидные смолы с наполнителем, которые имеют умеренную смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низким экзотермическим эффектом и, как правило, признаны UL 1446 в качестве заливочного компаунда с изоляцией до 180 ° C, класс H.
Уникальным преимуществом двигателей постоянного тока без железа является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью не содержит железа, хотя железные роторы являются слоистыми. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую частоту переключения (> 40 кГц) или постоянный ток из-за уменьшения электромагнитной индукции.
Изначально эти двигатели были изобретены для привода ленточных приводов с магнитной лентой, где минимальное время для достижения рабочей скорости и минимальный тормозной путь были критическими.Блинные двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, зажатого между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт / кг, постоянную мощность около 7,5 кВт / кг. Этот двигатель с осевым потоком без ярма обеспечивает более короткий путь потока, удерживая магниты дальше от оси.Конструкция позволяет иметь нулевой вылет обмотки; Активны 100 процентов обмоток. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели можно штабелировать для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прикладывают равные и противоположные силы к диску статора. Роторы соединены напрямую друг с другом через кольцо вала, что нейтрализует магнитные силы.
Размеры двигателейMagnax варьируются от 15 до 5,4 метра (5,9–17 футов 8,6 дюйма) в диаметре.
Серводвигатель
Серводвигатель — это двигатель, очень часто продаваемый в виде готового модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и является высоким соотношением для серводвигателя. Также важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность контура сервомеханизма.В больших, мощных, но медленно реагирующих сервоконтурах могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости на двигателе. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, например, без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, благоприятствуют применению синхронных двигателей с постоянными магнитами, BLDC, индукционных приводов и приводов SRM.
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению является непрерывной, пока двигатель работает.Шаговая система по своей сути работает с разомкнутым контуром — полагаясь на двигатель, который не «пропускает шаги» для кратковременной точности — с любой обратной связью, такой как «исходный» переключатель или датчик положения, являющиеся внешними по отношению к двигательной системе. Например, когда запускается типичный компьютерный принтер с точечной матрицей, его контроллер заставляет шаговый двигатель печатающей головки приводиться к левому пределу, где датчик положения определяет исходное положение и останавливает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговый двигатель — это тип двигателя, который часто используется, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явными полюсами управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается и затем быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности, ротор может вращаться вперед или назад, и он может произвольно менять направление, останавливаться, ускоряться или замедляться в любое время.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками шестерен и, таким образом, вращаться чрезвычайно плавно.Этот режим работы часто называют микрошагом. Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателиможно легко поворачивать на определенный угол дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах компьютерных гибких дисков. Они использовались для той же цели в компьютерных дисковых накопителях до гигабайтной эры, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи жесткого диска.По мере увеличения плотности накопителей, ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — таким образом, в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре в типичном (конусном) громкоговорителе. Эта структура некоторое время использовалась для размещения головок. Современные приводы имеют поворотное крепление катушки; катушка качается вперед-назад, что-то вроде лопасти вращающегося вентилятора.Тем не менее, подобно звуковой катушке, современные проводники катушки исполнительного механизма (магнитный провод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), а также валика или подающих роликов. Аналогичным образом, многие компьютерные плоттеры (которые с начала 1990-х были заменены широкоформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для перемещения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; они имеют одну катушку, потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатели с переменным сопротивлением. Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями с катушкой. Обычно для них требуется высоковольтный источник питания, хотя в очень маленьких двигателях требуется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют высокого тока при низких напряжениях. В 1750-х годах первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном.Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (MEMS), где их управляющее напряжение ниже 100 вольт, а в подвижных заряженных пластинах гораздо проще изготовить, чем катушки и железные сердечники. Кроме того, молекулярные механизмы, управляющие живыми клетками, часто основаны на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
В двигательной установке космического корабля с электроприводом используется технология электродвигателя для приведения космического корабля в космическое пространство, большинство систем основано на электрическом приводе топлива в высокую скорость, а некоторые системы основаны на принципах электродинамического троса для движения к магнитосфере.
Источник из Википедии
Электродвигатель| Encyclopedia.com
Двигатель постоянного тока
Типы двигателей постоянного тока
Двигатели переменного тока
Принципы работы трехфазного двигателя
Ресурсы
Электродвигатель — это машина, используемая для преобразования электрической энергии в механическую. Электродвигатели важны для современной жизни, они используются в пылесосах, посудомоечных машинах, компьютерных принтерах, факсах, водяных насосах, производстве, автомобилях (как обычных, так и гибридных), станках, печатных станках, системах метро и т. Д.
Основные физические принципы работы электродвигателя известны как закон Ампера и закон Фарадея. Первая гласит, что электрический проводник, находящийся в магнитном поле, будет испытывать силу, если любой ток, протекающий через проводник, имеет компонент, расположенный под прямым углом к этому полю. Изменение направления тока или магнитного поля приведет к возникновению силы, действующей в противоположном направлении. Второй принцип гласит, что если проводник перемещается через магнитное поле, то любой компонент движения, перпендикулярный этому полю, будет создавать разность потенциалов между концами проводника.
Электродвигатель состоит из двух основных элементов. Первый, статический компонент, который состоит из магнитных материалов и электрических проводников для создания магнитных полей желаемой формы, известен как статор . Второй, который также сделан из магнитных и электрических проводников для создания определенных магнитных полей, которые взаимодействуют с полями, создаваемыми статором, известен как ротор . Ротор содержит подвижный компонент двигателя, имеющий вращающийся вал для соединения с приводимой в действие машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (обычно угольные щетки, прижатые к контактным кольцам).В процессе работы электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре. Эти поля сталкиваются друг с другом, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Электродвигатели делятся на две большие категории, в зависимости от типа применяемой электроэнергии: двигатели постоянного (DC) и переменного (AC) тока.
Первый электродвигатель постоянного тока был продемонстрирован Майклом Фарадеем в Англии в 1821 году.Поскольку единственными доступными электрическими источниками был постоянный ток, первые коммерчески доступные двигатели были электродвигателями постоянного тока, которые стали популярными в 1880-х годах. Эти двигатели использовались как для маломощных, так и для больших мощностей, таких как электрические уличные железные дороги. Только в 1890-х годах, когда появилась электроэнергия переменного тока, двигатель переменного тока был разработан, в первую очередь, корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока.Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Работа двигателя постоянного тока зависит от взаимодействия полюсов статора с частью ротора или якоря. Статор содержит четное число полюсов переменной магнитной полярности, каждый полюс состоит из электромагнита, образованного из обмотки полюса, намотанной на сердечник полюса. Когда через обмотку протекает постоянный ток, создается магнитное поле. Якорь также содержит обмотку, в которой ток течет в указанном направлении.Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который поворачивает якорь.
Если бы обмотки якоря вращались вокруг следующего полюса противоположной полярности, крутящий момент действовал бы в противоположном направлении, останавливая якорь. Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток, текущий в в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, чтобы создать крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами.Коммутатор обычно состоит из разъемного контактного кольца, по которому движутся щетки, протекающие по постоянному току.
Вращение обмоток якоря через поле статора создает на якоре напряжение, известное как противо-ЭДС (электродвижущая сила), поскольку оно противодействует приложенному напряжению: это следствие закона Фарадея. Величина противо-ЭДС зависит от напряженности магнитного поля и скорости вращения якоря. При первоначальном включении двигателя постоянного тока нет противодействия ЭДС, и якорь начинает вращаться.Счетчик ЭДС увеличивается с вращением. Действующее напряжение на обмотках якоря — это приложенное напряжение за вычетом противо-ЭДС.
Двигатели постоянного тока встречаются чаще, чем мы думаем. Автомобиль может иметь до 20 двигателей постоянного тока для привода вентиляторов, сидений и окон. Они бывают трех разных типов, классифицируемых в зависимости от используемой электрической схемы. В параллельном двигателе якорь и обмотка возбуждения соединены параллельно, поэтому токи через каждую из них относительно независимы.Ток через обмотку возбуждения можно регулировать с помощью реостата возбуждения (переменного резистора), что позволяет изменять скорость двигателя в широких пределах в широком диапазоне условий нагрузки. Этот тип двигателя используется для привода станков или вентиляторов, для которых требуется широкий диапазон скоростей.
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря, что приводит к очень высокому пусковому моменту, поскольку как ток якоря, так и напряженность поля максимальны.Однако, как только якорь начинает вращаться, противо-ЭДС снижает ток в цепи, тем самым уменьшая напряженность поля. Серийный двигатель используется там, где требуется большой пусковой крутящий момент, например, в автомобильных стартерах, кранах и подъемниках.
Составной двигатель представляет собой комбинацию последовательного и параллельного двигателей с параллельными и последовательными обмотками возбуждения. Этот тип двигателя имеет высокий пусковой момент и способность изменять скорость и используется в ситуациях, требующих обоих этих свойств, таких как пробивные прессы, конвейеры и лифты.
Двигатели переменного тока встречаются гораздо чаще, чем двигатели постоянного тока, потому что почти все системы электроснабжения работают с переменным током. Существует три основных типа двигателей: многофазные асинхронные, многофазные синхронные и однофазные. Поскольку трехфазные источники питания являются наиболее распространенными многофазными источниками, большинство многофазных двигателей работают от трехфазных. Трехфазные источники питания широко используются в коммерческих и промышленных условиях, тогда как однофазные источники питания почти всегда используются в домашних условиях.
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока. Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в пределах цикла тока, тот полюс поля, магнитное поле которого является наибольшим, постоянно изменяется между тремя полюсами, в результате чего магнитное поле, видимое ротором, вращается.Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и количества полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3 600 об / мин.
В трехфазном асинхронном двигателе обмотки на роторе не подключены к источнику питания, а
Ключевые термины
AC — Переменный ток, при котором ток в цепи меняет направление потока через равные промежутки времени.
DC — Постоянный ток, при котором ток в цепи примерно постоянен во времени.
Ротор — Та часть электродвигателя, которая может свободно вращаться, включая вал, якорь и связь с машиной.
Статор — Та часть электродвигателя, которая не может вращаться, включая катушки возбуждения.
Крутящий момент — Способность или сила, необходимые для поворота или скручивания вала или другого объекта.
— это, по сути, короткие замыкания.Самый распространенный тип обмотки ротора, обмотка с короткозамкнутым ротором, очень напоминает ходовое колесо, используемое в клетках для домашних песчанок. Когда двигатель изначально включен, а ротор неподвижен, проводники ротора испытывают изменяющееся магнитное поле, перемещающееся с синхронной скоростью. Согласно закону Фарадея, эта ситуация приводит к индукции токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора. Поскольку условия для работы двигателя теперь выполнены, то есть проводники с током находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться.Ротор никогда не может вращаться с синхронной скоростью, потому что не будет относительного движения между магнитным полем и обмотками ротора, и ток не может быть индуцирован. Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он передает, и числом полюсов, создающих магнитное поле в статоре. Если некоторые полюса включаются или выключаются, скорость двигателя можно регулировать с приращением. В двигателях с фазным ротором сопротивление обмоток ротора может быть изменено извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей. В синхронном двигателе ротор использует катушку под напряжением постоянного тока для создания постоянного магнитного поля. После того, как ротор приближается к синхронной скорости двигателя, северный (южный) полюс магнита ротора блокируется с южным (северным) полюсом вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает в себя обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока.Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
Однофазные асинхронные двигатели и синхронные двигатели, используемые в большинстве бытовых ситуаций, работают по принципам, аналогичным описанным для трехфазных двигателей. Однако для создания пусковых моментов необходимо внести различные модификации, поскольку одна фаза не будет генерировать только вращающееся магнитное поле. Следовательно, в асинхронных двигателях используются конструкции с разделенной фазой, конденсаторным пуском или с экранированными полюсами.Небольшие синхронные однофазные двигатели, используемые для таймеров, часов, магнитофонов и т. П., Основаны на конструкциях с сопротивлением или гистерезисом.
КНИГИ
Красильщик. Катушки силы тока: как сделаны и как используются: с описанием электрического света, электрических звонков, электродвигателей, телефона, микрофона и фонографа . Бостон: Adamant Media Corporation, 2005.
Эмади, Али. Энергоэффективные электродвигатели . Нью-Йорк: CRC, 2004.
Hughes, Austin. Электродвигатели и приводы . Оксфорд, Великобритания: Newnes, 2005.
Иэн А. Макинтайр
Электродвигатель — Энциклопедия New World
Вращающееся магнитное поле как сумма магнитных векторов трех фазных катушекЭлектродвигатель преобразует электрическую энергию в кинетическую энергию. Обратная задача — преобразование кинетической энергии в электрическую — выполняется генератором или динамо-машиной. Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а некоторые приложения используют одно устройство для выполнения обеих ролей.Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой токоведущий провод, находящийся внутри магнитного поля, действует механическая сила. Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю.
Большинство магнитных двигателей являются вращающимися, но существуют и линейные двигатели. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно. Правильно, якорь — это та часть двигателя, на которую подается входное напряжение.В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Двигатели постоянного (постоянного тока)
Электродвигатели различных размеров. Ротор от небольшого двигателя постоянного тока 3 В. Этот двигатель имеет 3 катушки, и коммутатор можно увидеть на ближнем конце.Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью. Постоянный магнит был помещен в середину ртутной ванны.Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода. Этот мотор часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу.
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.Томас Давенпорт построил небольшой электродвигатель постоянного тока в 1834 году, используя его для управления игрушечным поездом по круговой дороге. Он получил патент на него в 1837 году.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, приведя его в действие как двигатель. Машина Грамма была первым промышленно полезным электродвигателем; более ранние изобретения использовались в качестве игрушек или лабораторных диковинок.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита.Поворотный переключатель, называемый коммутатором, меняет направление электрического тока дважды за цикл, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В этот момент переключения полярности импульс поддерживает классический двигатель в нужном направлении.(См. Схемы ниже.)
- Вращение двигателя постоянного тока
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отталкивается от левого магнита и тянется вправо, вызывая вращение.
Якорь продолжает вращаться.
Когда якорь становится выровненным по горизонтали, коммутатор меняет направление тока через катушку, меняя направление магнитного поля.Затем процесс повторяется.
Электродвигатель постоянного тока с возбужденным полем
Постоянные магниты на внешней стороне (статоре) электродвигателя постоянного тока можно заменить электромагнитами. Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательная обмотка) с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (шунтирующая обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом или имеют обмотку частично параллельно, а частично последовательно (составная обмотка) для баланса, обеспечивающего стабильную скорость в диапазоне нагрузок. Раздельное возбуждение также является обычным, с фиксированным напряжением поля, скорость регулируется изменением напряжения якоря. Дальнейшее уменьшение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Теория
Если вал двигателя постоянного тока вращается под действием внешней силы, двигатель будет действовать как генератор и создавать электродвижущую силу (ЭДС). Это напряжение также генерируется при нормальной работе двигателя.Вращение двигателя создает напряжение, известное как противо-ЭДС (CEMF) или противо-ЭДС, поскольку оно противодействует приложенному напряжению на двигателе. Следовательно, падение напряжения на двигателе состоит из падения напряжения из-за этой CEMF и паразитного падения напряжения, возникающего из-за внутреннего сопротивления обмоток якоря.
Поскольку CEMF пропорциональна скорости двигателя, при первом запуске или полном останове электродвигателя CEMF отсутствует. Следовательно, ток через якорь намного выше.Этот высокий ток создаст сильное магнитное поле, которое запустит вращение двигателя. По мере вращения двигателя CEMF увеличивается до тех пор, пока не станет равным приложенному напряжению за вычетом паразитного падения напряжения. В этот момент через двигатель будет протекать меньший ток.
Управление скоростью
Обычно скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления.Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе. Обычно это делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или используя переключающее устройство с электронным управлением, состоящее из тиристоров, транзисторов или, ранее, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания.Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Процент времени включения, умноженный на напряжение питания, дает среднее напряжение, приложенное к двигателю.
Поскольку двигатель постоянного тока с последовательным возбуждением развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи. Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи).По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе), пока он не разрушит себя. Это также может быть проблемой для железнодорожных двигателей в случае потери сцепления, поскольку, если быстро не взять под контроль двигатели, они могут развивать скорость намного выше, чем при нормальных обстоятельствах. Это может вызвать проблемы не только для самих двигателей и шестерен, но и из-за разницы скоростей между рельсами и колесами, это может также вызвать серьезные повреждения рельсов и ступеней колес, поскольку они быстро нагреваются и охлаждаются.Ослабление поля используется в некоторых электронных элементах управления для увеличения максимальной скорости электромобиля. В простейшей форме используется контактор и резистор ослабления поля, электронное управление контролирует ток двигателя и подключает резистор ослабления поля в цепь, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель работает на полной расчетной скорости). Как только резистор включен в цепь, двигатель увеличит скорость выше своей нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, система управления отключает резистор и становится доступным крутящий момент на низкой скорости.
Одним из интересных методов управления скоростью двигателя постоянного тока является управление Уорда-Леонарда. Это метод управления двигателем постоянного тока (обычно с шунтирующей или составной обмоткой) и был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока (переменного тока), хотя он не лишен своих преимуществ в схемах постоянного тока. Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока из якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции).Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этим методом управления был метод de facto с момента его разработки до тех пор, пока он не был заменен твердотельными тиристорными системами. Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок больших шахтных карьеров и даже промышленного технологического оборудования и электрических кранов.Его основным недостатком было то, что для реализации схемы требовалось три машины (пять в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка мотор-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости. Есть множество устаревших установок Ward-Leonard, которые все еще используются.
Универсальные двигатели
Вариант обмотки Двигатель постоянного тока — универсальный двигатель . Название происходит от того факта, что он может использовать переменный ток или постоянный ток, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) одновременно, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении . На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель, как правило, менее эффективен, чем эквивалентный чистый двигатель DC .При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя. В этом приложении для поддержания высокого электрического КПД они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2 / 3 Гц. Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами. Непрерывное управление скоростью универсального двигателя, работающего от переменного тока, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может осуществляться с помощью нескольких отводов на катушке возбуждения.Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с 0,707 среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превышать один оборот за цикл сетевого тока. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные измельчители часто превышают 30 000 об / мин.Теоретический универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению. Однако в реальной жизни различное трение подшипников, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора — все это предотвращает превышение скорости.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, где раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных сооружений. На достаточно низких частотах характеристики двигателя примерно такие же, как если бы двигатель работал от постоянного тока.
Двигатели переменного тока
В 1882 году Никола Тесла определил принцип вращающегося магнитного поля и впервые применил вращающееся силовое поле для работы машин.Он использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. В 1885 году Галилео Феррарис независимо исследовал эту концепцию. В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
Появление двигателя Теслы с 1888 года и далее положило начало так называемой Второй промышленной революции, сделав возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретенной Тесла (1888 г.).До изобретения вращающегося магнитного поля двигатели работали, непрерывно пропуская проводник через постоянное магнитное поле (как в униполярных двигателях).
Тесла предположил, что коммутаторы из машины могут быть удалены, и устройство может работать во вращающемся силовом поле. Его учитель профессор Пошель заявил, что это было бы похоже на создание вечного двигателя. [1] Tesla позже получит патент США 0416194 (PDF), Electric Motor (декабрь 1889 г.), который напоминает двигатель, изображенный на многих фотографиях Теслы.Этим классическим электромагнитным двигателем переменного тока был асинхронный двигатель .
| Энергия статора | Энергия ротора | Общая потребляемая энергия | Развиваемая мощность |
|---|---|---|---|
| 10 | 90 | 100 | 900 |
| 50 10033 9033 903 903 903 903 |
В асинхронном двигателе , поле и якорь в идеале имели одинаковую напряженность поля, а сердечники поля и якоря были одинакового размера.Полная энергия, потребляемая для работы устройства, равнялась сумме энергии, затраченной на якорь и катушку возбуждения. [2] Мощность, развиваемая при работе устройства, равна произведению энергии, затраченной в катушках якоря и возбуждения. [3]
Михаил Осипович Доливо-Добровольский позже изобрел трехфазный «клеть-ротор» в 1890 году. Успешная коммерческая многофазная система генерации и передачи на большие расстояния была спроектирована Алмерианом Декером в Mill Creek No.1 [4] в Редлендс, Калифорния. [5]
Компоненты и типы
Типичный двигатель переменного тока состоит из двух частей:
- Внешний стационарный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
В зависимости от типа используемого ротора существует два основных типа электродвигателей переменного тока:
- Синхронный электродвигатель, который вращается точно с частотой питания или долей частоты питания, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и головки считывающего устройства привода CD / DVDПри наличии многофазного источника питания, Обычно используется трехфазный (или многофазный) асинхронный двигатель переменного тока, особенно для двигателей большей мощности. Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля.Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигатели являются рабочими лошадками промышленности, и двигатели мощностью до 500 кВт (670 лошадиных сил) производятся в строго стандартизированных размерах корпуса, что делает их практически полностью взаимозаменяемыми между производителями (хотя стандартные размеры в Европе и Северной Америке различаются). Очень большие синхронные двигатели могут иметь выходную мощность в десятки тысяч кВт для трубопроводных компрессоров, приводов в аэродинамической трубе и наземных преобразовательных систем.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Беличья клетка получила свое название от своей формы — кольца на обоих концах ротора, с перемычками, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитые между железными пластинами ротора, и обычно видны только концевые кольца.Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и концевых колец; В двигателях с высоким КПД часто используется литая медь для уменьшения сопротивления ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора.Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой. Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, электродвигатель воздуходувки с короткозамкнутым ротором может приводить к затемнению света в доме при запуске, но не затемняет свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается.Кроме того, остановившийся двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничивает ток (или не отключает его полностью), вероятным результатом является перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости.В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств.Транзисторные инверторы с частотно-регулируемым приводом теперь можно использовать для управления скоростью, а двигатели с фазным ротором становятся все реже. (Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток, но это никогда не используется в бытовых приборах, потому что это может вызвать электрические помехи и из-за высоких требований к мощности.)
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы (Direct-on-line, DOL).Там, где необходимо ограничить пусковой пусковой ток (если двигатель большой по сравнению с мощностью короткого замыкания источника питания), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости. Этот метод более распространен в Европе, чем в Северной Америке.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока
Если соединения с обмотками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнит), результат называется синхронным двигателем, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться в качестве генератора переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами.Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, ток в обмотке с короткозамкнутым ротором не индуцируется, поэтому он мало влияет на синхронную работу двигателя. , помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей.
Двухфазные серводвигатели переменного тока
Типичный двухфазный серводвигатель переменного тока имеет короткозамкнутый ротор и поле, состоящее из двух обмоток: 1) главной обмотки постоянного напряжения (переменного тока) и 2) управляющей обмотка напряжения (переменного тока) находится в квадратуре с основной обмоткой, чтобы создать вращающееся магнитное поле.Электрическое сопротивление ротора намеренно повышено, чтобы кривая скорость-крутящий момент была достаточно линейной. Двухфазные серводвигатели по своей сути являются высокоскоростными устройствами с низким крутящим моментом, которые в значительной степени приспособлены для управления нагрузкой.
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле должно создаваться другими способами. Обычно используются несколько методов.
Обычным однофазным двигателем является двигатель с экранированными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы.В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле, создавая необходимое вращающееся магнитное поле.
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой , обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды.По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В электродвигателях с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель.
Фаза магнитного поля в этой пусковой обмотке сдвинута по сравнению с фазой сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель. Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. Тогда двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В конденсаторном пусковом двигателе , пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, способную к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту). Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другой вариант — двигатель с постоянным разделенным конденсатором (PSC) (также известный как конденсаторный двигатель запуска и работы). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания.Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость.
Отталкивающие двигатели — это однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В отталкивающем двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было изготовлено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском (RS-IR).Двигатель RS-IR оснащен центробежным переключателем, который замыкает все сегменты коммутатора, так что двигатель работает как асинхронный двигатель после разгона до полной скорости. Двигатели RS-IR используются для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 год было продано немного отталкивающих двигателей любого типа.
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи).Роторы в этих двигателях не требуют индуцированного тока, поэтому они не скользят назад против частоты сети. Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых дисков и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопов. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Моментные двигатели
Моментные двигатели — это особая разновидность асинхронных двигателей, которые могут работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений.В этом режиме двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название). Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимые в действие низким напряжением, характеристики этих двигателей позволяют приложить относительно постоянное легкое натяжение к ленте, независимо от того, протягивает ли ведущая лента мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.В компьютерном мире моментные двигатели используются с рулевыми колесами с обратной связью по усилию.
Шаговые двигатели
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Двигатель с постоянными магнитами
Двигатель с постоянными магнитами аналогичен обычному двигателю постоянного тока, за исключением того факта, что обмотка возбуждения заменена постоянными магнитами. Таким образом, двигатель будет действовать как двигатель постоянного тока с постоянным возбуждением (двигатель постоянного тока с независимым возбуждением).
Эти двигатели обычно имеют небольшую мощность, до нескольких лошадиных сил. Они используются в небольших приборах, транспортных средствах с батарейным питанием, в медицинских целях, в другом медицинском оборудовании, таком как рентгеновские аппараты. Эти двигатели также используются в игрушках и в автомобилях в качестве вспомогательных двигателей для регулировки сиденья, электрических стеклоподъемников, люка в крыше, регулировки зеркал, электродвигателей нагнетателя, вентиляторов охлаждения двигателя и т.п.
Последняя разработка — двигатели ПСМ для электромобилей.- Высокая эффективность — Минимальный фиксирующий момент и крутящий момент неровности поверхности — Небольшая занимаемая площадь, компактные размеры — Малый вес источник [3]
Бесщеточные двигатели постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины.Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора.Бесщеточные двигатели обычно имеют КПД 85-90 процентов, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80 процентов.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные аналогично шаговым двигателям, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через основные фазовые соединения вместо датчиков Холла.Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах и упоминаются моделистами как двигатели outrunner (поскольку магниты находятся снаружи).
Бесщеточные двигатели постоянного тока обычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных товаров, таких как вентиляторы, лазерные принтеры и копировальные аппараты. . У них есть несколько преимуществ по сравнению с обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока.Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без переключателя или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как звуковое оборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, могут также обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением).В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Бесщеточные двигатели не имеют шансов на искрение, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт.Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов. Этим фактом пользуется бесщеточный электродвигатель постоянного тока , специализированная форма щеточного электродвигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника.Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блинчика (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лентопротяжных устройств и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Линейные двигатели
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
Электродвигатель с двойным питанием
Электродвигатели с двойным питанием или Электромашины с двойным питанием включают в себя два набора многофазных обмоток с независимым питанием, которые активно участвуют в процессе преобразования энергии (т. Е. С двойным питанием), по крайней мере, с одним из комплекты обмоток с электронным управлением для синхронной работы от субсинхронных до сверхсинхронных скоростей.В результате электродвигатели с двойной подачей питания представляют собой синхронные машины с эффективным диапазоном скоростей с постоянным крутящим моментом, который в два раза превышает синхронную скорость для данной частоты возбуждения. Это вдвое больше диапазона скоростей с постоянным крутящим моментом, чем у электрических машин с одиночным питанием, в которых используется одна активная обмотка. Теоретически этот атрибут имеет привлекательные последствия по стоимости, размеру и эффективности по сравнению с электрическими машинами с однополярным питанием, но двигатели с двойным питанием трудно реализовать на практике.
Электромашины с двойным питанием и бесщеточным ротором с двойным питанием, бесщеточные электрические машины с двойным питанием и так называемые бесщеточные электрические машины с двойным питанием — единственные примеры синхронных электрических машин с двойным питанием.
Электродвигатель с однополярным питанием
Электродвигатели с однополярным питанием или Электромашины с одиночным питанием содержат одну многофазную обмотку, которая активно участвует в процессе преобразования энергии (т. Электромашины с однополярным питанием работают либо по индукционным (т.е. асинхронным), либо по синхронным принципам. Комплект активной обмотки может управляться электроникой для оптимальной производительности. Индукционные машины демонстрируют пусковой момент и могут работать как автономные машины, но синхронные машины должны иметь вспомогательные средства для запуска и практической работы, такие как электронный контроллер.
Асинхронные двигатели (т. Е. С короткозамкнутым ротором или с фазным ротором), синхронные двигатели (т. Е. Двигатели с возбуждением от поля, двигатели с постоянными магнитами или бесщеточные двигатели постоянного тока, реактивные двигатели и т. Д.), Которые обсуждаются на этой странице, являются примеры двигателей с однополярным питанием. Безусловно, двигатели с однополярным питанием — это преимущественно устанавливаемые двигатели.
Двигатель с двумя механическими портами
Электродвигатели с двумя механическими портами (или электродвигатель DMP) считается новой концепцией электродвигателей.Точнее, электродвигатели DMP — это на самом деле два электродвигателя (или генератора), занимающие один и тот же корпус. Каждый двигатель работает по традиционным принципам электродвигателя. Электрические порты, которые могут включать в себя электронную опору электродвигателей, связаны с одним электрическим портом, в то время как два механических порта (вала) доступны снаружи. Теоретически ожидается, что физическая интеграция двух двигателей в один увеличит удельную мощность за счет эффективного использования неиспользуемого в противном случае магнитного сердечника.Механика интеграции, например, для двух механических валов, может быть довольно экзотической.
Наномотор с нанотрубками
Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многослойных углеродных нанотрубок. Прикрепив золотую пластину (размером порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (например, вложенных углеродных цилиндров), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра.Эти подшипники очень прочные; Устройства колебались тысячи раз без признаков износа. Работа была сделана на месте в SEM. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации, которая в будущем может найти свое применение в коммерческих целях.
На этом рендере можно увидеть процесс и технологию.
Пускатели двигателей
Противо-ЭДС помогает сопротивлению якоря ограничивать ток через якорь. При первом подаче питания на двигатель якорь не вращается.В этот момент противоэдс равна нулю, и единственным фактором, ограничивающим ток якоря, является сопротивление якоря. Обычно сопротивление якоря двигателя меньше одного Ом; поэтому ток через якорь при подаче питания будет очень большим. Этот ток может вызвать чрезмерное падение напряжения, что повлияет на другое оборудование в цепи. Или просто отключите устройства защиты от перегрузки.
- Следовательно, возникает необходимость в дополнительном сопротивлении, включенном последовательно с якорем, для ограничения тока до тех пор, пока вращение двигателя не сможет создать противоэдс.По мере увеличения скорости вращения двигателя сопротивление постепенно снижается.
Трехточечный пускатель
Входящая мощность обозначается как L1 и L2. Компоненты, обозначенные пунктирными линиями, образуют трехточечный стартер. Как следует из названия, есть только три соединения с пускателем. Подключения к якорю обозначены как A1 и A2. Концы катушки возбуждения (возбуждения) обозначены как F1. и F2. Для управления скоростью полевой реостат соединен последовательно с шунтирующим полем.Одна сторона линии соединена с рычагом стартера (на схеме обозначена стрелкой). Рычаг подпружинен, поэтому он вернется в положение «Выкл.», Которое не удерживается ни в каком другом положении.
- На первом этапе плеча полное линейное напряжение прикладывается к полю шунта. Поскольку полевой реостат обычно устанавливается на минимальное сопротивление, скорость двигателя не будет чрезмерной; кроме того, двигатель будет развивать большой пусковой крутящий момент.
- Стартер также соединяет электромагнит последовательно с шунтирующим полем.Он будет удерживать рычаг в положении, когда рычаг соприкасается с магнитом.
- Между тем это напряжение подается на шунтирующее поле, а пусковое сопротивление ограничивает прохождение тока к якорю.
- По мере того, как двигатель набирает скорость, нарастает противо-ЭДС, рычаг медленно перемещается в положение короткого замыкания.
Четырехточечный стартер
Четырехточечный стартер устраняет недостаток трехточечного стартера. В дополнение к тем же трем точкам, которые использовались с трехточечным стартером, другая сторона линии, L1, является четвертой точкой, подведенной к стартеру.Когда рычаг перемещается из положения «Выкл.», Катушка удерживающего магнита подключается к линии. Удерживающий магнит и пусковые резисторы работают так же, как и в трехпозиционном пускателе.
- Возможность случайного размыкания цепи возбуждения весьма мала. Четырехточечный пускатель обеспечивает защиту двигателя от обесточивания. В случае сбоя питания двигатель отключается от сети.
См. Также
Компоненты:
- Центробежный переключатель
- Коммутатор (электрический)
- Контактное кольцо
Ученые и инженеры:
Приложения:
- Настольная пила
- Коррекция коэффициента мощности
- Электромобиль
- Электромобиль
Другое:
- Электротехника
- Электрический элемент
- Электрогенератор
- Список тем по электронике
- Список технологий
- Теорема максимальной мощности
- Мотор-генератор
- Контроллер мотора
- Метод движения
- Однофазный электроэнергия
- Хронология развития двигателей и двигателей
Примечания
Ссылки
- Bedford, B.Д., Р. Г. Хофт и др. 1964. Принципы инверторных цепей. Нью-Йорк: John Wiley & Sons, Inc. ISBN 0471061344. (Для управления скоростью двигателя с регулируемой частотой используются схемы инвертора)
- Чиассон, Джон Н. 2005. Моделирование и высокопроизводительное управление электрическими машинами , Нью-Йорк, Нью-Йорк: Wiley-IEEE Press. ISBN 047168449X.
- Fink, Donald G .; Бити, Х. Уэйн (1978). Стандартный справочник для инженеров-электриков, одиннадцатое издание. Нью-Йорк, Нью-Йорк: Макгроу-Хилл.ISBN 007020974X.
- Фицджеральд, А. Э., Чарльз Кингсли-младший, Стивен Д. Уманс. 2002. Электрические машины. Колумбус, Огайо: McGraw-Hill Science / Engineering / Math. ISBN 0073660094.
- Хьюстон, Эдвин Дж .; Артур Кеннелли, (1902) Последние типы динамо-электрических машин. , авторское право — American Technical Book Company 1897, Нью-Йорк, Нью-Йорк: P.F. Кольер и сыновья. ASIN: B000874XH6
- Купхальдт, Тони Р. Уроки электрических цепей — Том II. 2000-2006.Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА. дата обращения 11 апреля 2006 г.
- Пелли Б. Р. (1971). Тиристорные преобразователи с фазовым управлением и циклоконвертеры. Хобокен, Нью-Джерси: John Wiley & Sons. ISBN 0471677906
- Шейнфилд Д. Дж. (2001). Промышленная электроника для инженеров, химиков и техников. Норвич, Нью-Йорк: Издательство Уильяма Эндрю. ISBN 0815514670.
- Smith, A.O. Переменного и постоянного тока электродвигателей. [4]. accessdate 11 апреля 2006 г.
Внешние ссылки
Все ссылки получены 18 сентября 2017 г.
Кредиты
Энциклопедия Нового Света писателей и редакторов переписали и завершили статью Википедия в соответствии со стандартами New World Encyclopedia . Эта статья соответствует условиям лицензии Creative Commons CC-by-sa 3.0 (CC-by-sa), которая может использоваться и распространяться с указанием авторства. Кредит предоставляется в соответствии с условиями этой лицензии, которая может ссылаться как на участников Энциклопедии Нового Света, участников, так и на самоотверженных добровольцев Фонда Викимедиа.Чтобы процитировать эту статью, щелкните здесь, чтобы просмотреть список допустимых форматов цитирования. История более ранних вкладов википедистов доступна исследователям здесь:
История этой статьи с момента ее импорта в Энциклопедию Нового Света :
Примечание. могут применяться ограничения на использование отдельных изображений, на которые распространяется отдельная лицензия.
Двигатели переменного и постоянного тока: различия и преимущества
Электродвигатели играют важную роль почти во всех отраслях промышленности.Использование двигателя правильного типа с высококачественными деталями и регулярным обслуживанием обеспечивает бесперебойную работу вашего предприятия и предотвращает повреждение оконечного оборудования из-за износа или скачков напряжения.
Gainesville Industrial Electric может помочь вашей компании выбрать правильные промышленные электродвигатели и детали для ваших приложений.
A Primer on Electric Motors
Электродвигатели — это машины, которые преобразуют электрическую энергию — из накопленной мощности или прямого электрического соединения — в механическую энергию за счет создания силы вращения.Двумя основными типами электродвигателей являются:
- Двигатели переменного тока , которые питаются переменным током
- Двигатели постоянного тока , которые питаются постоянным током
Как работают электродвигатели
И переменного тока, и Электродвигатели постоянного тока используют электрический ток для создания вращающихся магнитных полей, которые, в свою очередь, создают вращательную механическую силу в якоре, расположенном на роторе или статоре, вокруг вала. В различных конструкциях двигателей используется одна и та же базовая концепция для преобразования электрической энергии в мощные всплески силы и обеспечения динамических уровней скорости или мощности.
Компоненты главного двигателя
Хотя электродвигатели могут отличаться от одной конструкции или типа к другой, многие из них содержат эти детали и узлы (расположены от центра, направленного наружу):
- Вал центрального двигателя
- Обмотки
- Подшипники (для уменьшения трения и износа)
- Якорь (расположен на роторе, вращающейся части или статоре, неподвижной части)
- Щетки (в двигателях постоянного тока)
- Клеммы
- Рама и торцевые щитки
Типы электродвигателей: AC vs.Двигатели постоянного тока
Двигатели переменного и постоянного тока — это широкие категории двигателей, которые включают меньшие подтипы. Например, асинхронные двигатели, линейные двигатели и синхронные двигатели — это все типы двигателей переменного тока. Двигатели переменного тока также могут включать в себя частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, в то время как двигатели постоянного тока доступны в моделях с самовозбуждением и с раздельным возбуждением.
Привод с регулируемой скоростью переменного тока
Двигатель переменного тока по сравнению с двигателем постоянного тока Преимущества
Каждый тип двигателя имеет различные преимущества, которые делают их наиболее подходящими для различных коммерческих и промышленных применений.Например, электродвигатели переменного тока серии гибки и просты в управлении. Некоторые из их других преимуществ включают:
- Низкие требования к мощности при запуске, которые также защищают компоненты на принимающей стороне
- Управляемые уровни пускового тока и ускорения
- Надстройки частотно-регулируемого привода или частотно-регулируемого привода, которые могут управлять скоростью и крутящим моментом на разных этапах использовать
- Высокая прочность и более длительный срок службы
- Возможности для многофазных конфигураций
Двигатели постоянного тока также обладают собственными преимуществами , такими как:
- Более простая установка и обслуживание
- Высокая пусковая мощность и крутящий момент
- Быстрое время отклика на запуск, остановку и ускорение
- Доступность для нескольких стандартных напряжений
Какой двигатель более мощный: переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут создавать более высокий крутящий момент за счет использования более мощного тока.Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели переменного и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить любые отраслевые требования к питанию.
Применение двигателей переменного и постоянного тока
Двигатели переменного и постоянного тока находят применение в технологических процессах и объектах практически во всех отраслях промышленности. Некоторые из наиболее распространенных промышленных приложений для двигателей переменного тока включают:
- Приборы
- Приводы и системы компрессоров
- Компьютеры
- Конвейерные системы
- Вентиляторы и кондиционеры
- Гидравлические и ирригационные насосы
- Транспортное оборудование
- Производственные и производственные единицы
- Оборудование, требующее постоянной мощности, такое как пылесосы, лифты и швейные машины
- Оборудование для сортировки на складе
Выбор подходящего электрического Электродвигатель для вашего промышленного применения
Установка и обслуживание правильных электродвигателей на предприятиях и оборудовании вашей компании является важным шагом к обеспечению бесперебойной работы и производства.
Gainesville Industrial Electric продает и обслуживает двигатели переменного и постоянного тока, запчасти и многое другое. Мы также являемся авторизованным заводским гарантийным центром. Чтобы получить помощь в выборе подходящего электродвигателя или промышленной сборки для вашего применения, свяжитесь с нами или запросите дополнительную информацию сегодня, чтобы получить ценовое предложение.
Соответствующее содержание: