БЛОК ПИТАНИЯ С РЕГУЛИРОВКОЙ ТОКА И НАПРЯЖЕНИЯ
Попалась в интернете недавно любопытная схемка простого, но довольно неплохого блока питания начального уровня, способного выдавать 0-24 В при ток до 5 ампер. В блоке питания предусмотрена защита, то есть ограничение максимального тока при перегрузке. В приложенном архиве есть печатная плата и документ, где приведено описание настройки данного блока, и ссылка на сайт автора. Прежде чем собирать, прочитайте внимательно описание.
Схема БП с регулировкой тока и напряжения
Изначально на фото печатной платы автора были ошибки, печатка была скопирована и доработана, ошибки устранены.
Вот фото моего варианта БП, вид готовой платы, и можно посмотреть как примерно применить корпус от старого компьютерного ATX. Регулировка сделана 0-20 В 1,5 А. Конденсатор С4 под такой ток поставлен на 100 мкФ 35 В.
При коротком замыкании максимум ограниченного тока выдается и загорается светодиод, вывел резистор ограничителя на переднюю панель.
Индикатор для блока питания
Провёл у себя ревизию, нашёл пару простеньких стрелочных головок М68501 для этого БП. Просидел пол дня над созданием экрана для него, но таки нарисовал его и точно настроил под требуемые выходные напряжения.
Сопротивление используемой головки индикатора и применённый резистор указаны в прилагаемом файле на индикаторе. Выкладываю переднюю панель блока, если кому понадобится для переделки корпус от блока питания АТХ, проще будет переставить надписи и что-то добавить, чем создавать с нуля. Если потребуются другие напряжения, шкалу можно просто подкалибровать, это уже проще будет. Вот готовый вид регулируемого источника питания:
Плёнка — самоклейка типа «бамбук». Индикатор имеет подсветку зелёного цвета. Красный светодиод Attention указывает на включившуюся защиту от перегрузки.
Дополнения от BFG5000
Максимальный ток ограничения можно сделать более 10 А. На кулер — кренка 12 вольт плюс температурный регулятор оборотов — с 40 градусов начинает увеличивать обороты. Ошибка схемы особо не влияет на работу, но судя по замерам при КЗ — появляется прирост проходящей мощности.
Ошибка схемы особо не влияет на работу, но судя по замерам при КЗ — появляется прирост проходящей мощности.
Силовой транзистор установил 2n3055, все остальное тоже зарубежные аналоги, кроме BC548 — поставил КТ3102. Получился действительно неубиваемый БП. Для новичков-радиолюбителей самое-то.
Выходной конденсатор поставлен на 100 мкФ, напряжение не скачет, регулировка плавная и без видимых задержек. Ставил из расчёта как указано автором: 100 мкф ёмкости на 1 А тока. Авторы: Igoran и BFG5000.
Форум по БП
Форум по обсуждению материала БЛОК ПИТАНИЯ С РЕГУЛИРОВКОЙ ТОКА И НАПРЯЖЕНИЯ
Блок питания с регулировкой тока и напряжения на энкодерах своими руками
В этой статье вы узнаете как собрать очень полезные блок питания с регулировкой напряжения и тока своими руками.
Все этапы сборки блока питания, а так же некоторые технические моменты, представлены в статье.
Данный блок питания будет полезен как начинающим радиолюбителям, так и опытным, вы обязательно найдете где применить этот блок питания!
Автор будет использовать блок питания от ноутбука, который выдает напряжение 15В и ток до 8А. Этого будет вполне достаточно.
- К шнуру блока питания нужно припаять подходящий разъем, с помощью которого будет подсоединять блок питания к понижающий схеме.
- В качестве понижающего преобразователя был выбран достаточно распространенный модуль, на котором можно изменять как напряжение, так и ток, с помощью вот этих вот 2-ух потенциометров.
Однако автор посчитал такие потенциометры не совсем удобными и поэтому решил заменить их на другие, так как скорее всего потребуется очень точная настройка напряжения. Было решено взять многооборотистый потенциометр, чтобы в дальнейшем облегчить себе задачу.
Настройку тока же будем производить обычным потенциометром, так как тут не нужна большая точность. Но в принципе, вам решать какие потенциометры использовать. Далее очень важный компонент — это вольтамперметр вместе с дисплеем, на котором будут отображаться значения. Для подключения разного рода нагрузок были выбраны банановые штекеры.
Так же было решено, что брать 5В из порта USB тоже достаточно удобно, потому что таким образом можно запитывать, например, arduino. Поэтому давайте добавим еще один модуль.
Ну что ж, с компонентами разобрались, теперь давайте приступим к работе. Корпус будем изготавливать из фанеры толщиной 8 мм.
А так как у автора в наличие имеется 3d принтер, то он не смог удержаться и использовал его в этом проекте для печати лицевой панели. 3d принтер также использовался потому, что большинство отверстий передней панели абсолютно нестандартного размера, и найти сверла правильного диаметра почти невозможно, а без конца работать напильником тоже не хочется.
Далее следует деревообработка. Тут лучше воспользоваться циркулярной пилой (конечно если она у вас есть), а также можно использовать электролобзик.
Передняя панель печаталась примерно полтора часа.
В итоге большинство отверстий оказались как раз по размеру, но к сожалению расстояние между отверстиями для банановых штекеров оказались не точными и автору пришлось немножко поработать дрелью. Далее необходимо склеить корпус.
- Ну и пока клей сохнет, давайте посмотрим на схему подключения блока питания:
Итак, на вход мы получаем 15 В. Есть выключатель, с помощью которого мы включаем-выключаем схему, и когда он замкнут сразу же запитывается модуль с USB портом.
На нем есть понижающий преобразователь, поэтому он запитывается напрямую. Также автор добавил предохранитель. Как только выключатель замыкается, то также запитывается и дисплей с вольтамперметром.
Далее главная часть — это основной преобразователь.
Тут у нас конечно же 2 потенциометра, минусовой контакт от преобразователя подключается к дисплею как бы в разрыв цепи, и далее идет на минусовой контакт бананового штекера.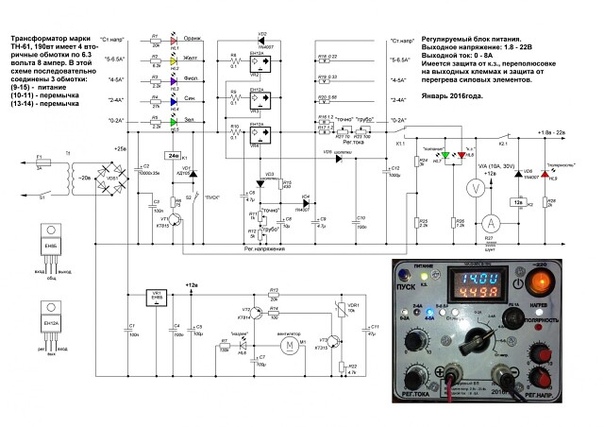
А плюсовой же контакт от преобразователя идёт напрямую к контакту бананового штекера, и параллельно к нему подсоединяется контакт от вольтамперметра. Таким образом, мы измеряем напряжение. И в общем то, все, согласитесь, очень просто.
Сначала выпаиваем родные потенциометры.
- Ну и теперь просто собираем все по схеме.
- Итак, все собрано, первый тест.
- Для первого теста автор решил подключить мотор.
Как видим, все очень хорошо заработало. Мы также видим, что вольтамперметр показывает какой ток потребляет мотор.
Настройка напряжения тоже отлично работает, но одна из особенностей этого dc-dc преобразователя, это возможность настроить еще и ток. Для этого нам нужно закоротить плюс и минус.
- После этого мы можем с помощью нижнего потенциометра настроить ток.
- Это очень полезная функция если мы хотим, например, зарядить аккумуляторы или протестировать мощный светодиод.
- Ну вот и готов наш блок питания, получилось достаточно симпатично, а главное в деле пригодится обязательно! Спасибо за внимание, делитесь статьёй в соц весях, если понравилось )
Видео самоделки:
Похожее
Источник: https://kavmaster.
Цифровой лабораторный блок питания с управлением через ПК
Наткнулся в интернете на схему лабораторного блока питания, да еще и с управлением от компьютера, и не смог устоять. Детали решил брать в российских магазинах, потому что доллар, санкции, ну и все такое.
Вот что из этого получилось…
Лабораторный блок питания нужен для запитывания различных махараек устройств на этапе разработки. Первое подобие лабораторника я сделал лет в 16. Это был леденящий душу ужас, который, тем не менее, худо-бедно справлялся со своими функциями.
Тогда я только начинал познавать электронику, и все ограничивалось кручением моторчиков. Мне бы в то время интернет и хоть какие то карманные деньги…
Первый блок питания
Потом был длительный перерыв, армия, несколько лет работы далеко от дома, но после этого периода я вернулся к этому хобби, все было гораздо серьезнее, и был изготовлен из подручных материалов этот монстр:
Фото
Он выдержал много издевательств, и жив до сих пор, но мне хотелось большего. Были мысли купить готовый у китайцев, но пока душила жаба случился кризис, а тут подвернулась эта схемка. Начал собирать компоненты. Многое нашлось в закромах (резисторы и транзисторы, импульсник от ноутбука, ненужная зарядка от телефона), но без закупки не обошлось. Чип-Дип силовой транзистор 2SD1047 — 110 р. конденсатор электролитический 330 мф — 2х8 р. корпус будущего блока питания — 540 р. итого 825 р. Чип-нн (со ссылками не получается из-за специфики сайта) операционный усилитель LM358N — 12 р. конденсатор электролитический 2200 мкф. — 13 р. винтовые терминалы 2х — 22 р. держатель светодиода х3 — 20 р. кнопка с фиксацией красная, здоровенная — 17 р. шунт 0.1 ом — 30 р. многоборотные подстроечные резисторы 470 ом х2 — 26 р. итого 140 р.
Были мысли купить готовый у китайцев, но пока душила жаба случился кризис, а тут подвернулась эта схемка. Начал собирать компоненты. Многое нашлось в закромах (резисторы и транзисторы, импульсник от ноутбука, ненужная зарядка от телефона), но без закупки не обошлось. Чип-Дип силовой транзистор 2SD1047 — 110 р. конденсатор электролитический 330 мф — 2х8 р. корпус будущего блока питания — 540 р. итого 825 р. Чип-нн (со ссылками не получается из-за специфики сайта) операционный усилитель LM358N — 12 р. конденсатор электролитический 2200 мкф. — 13 р. винтовые терминалы 2х — 22 р. держатель светодиода х3 — 20 р. кнопка с фиксацией красная, здоровенная — 17 р. шунт 0.1 ом — 30 р. многоборотные подстроечные резисторы 470 ом х2 — 26 р. итого 140 р.
Для любопытствующих схема.
Ардуино следит за напряжением на выходе, за током, и посредством ШИМ пинает силовой транзистор так, чтобы блок питания выдавал установленные значения.
Блок питания умеет выдавать напряжение от 1 до 16 вольт, обеспечивать ток 0. 1 — 8 ампер (при нормальном источнике напряжения) уходить в защиту и ограничивать ток. То есть его можно использовать для зарядки аккумуляторов, но я не рискнул, да и зарядник у меня уже есть.
1 — 8 ампер (при нормальном источнике напряжения) уходить в защиту и ограничивать ток. То есть его можно использовать для зарядки аккумуляторов, но я не рискнул, да и зарядник у меня уже есть.
Еще одна особенность этого странного блока питания в том, что он питается от двух напряжений. Основное напряжение должно подкрепляться вольтодобавкой от батарейки, или второго блока питания. Это нужно для корректной работы операционного усилителя.
Я использовал ноутбучный блок питания 19в 4А в качестве основного, и зарядку 5в 350мА от какого-то телефона в качестве добавочного питания.
Сборку я решил начать с пайки основной платы с расчетом забить болт, если не заработает, так как начитался комментов от криворуких, как все у них дымит, взрывается и не работает, да и к тому же я внес некоторые изменения в схему.
Для изготовления платы я купил новый лазерный принтер, чтобы наконец то освоить ЛУТ, ранее рисовал платы маркером (вот пример), тот еще геморрой. Плата получилась со второго раза, потому что в первый раз я зачем-то отзеркалил плату, чего делать было не нужно.
Окончательный результат:
Пробный запуск обнадежил, все работало как надо После удачного запуска я принялся курочить корпус. Начал с самого габаритного — системы охлаждения силового транзистора. За основу взял кулер от ноутбука, вколхозил это дело в заднюю часть. Натыкал на переднюю панель кнопок управления и лампочек. Здоровенная крутилка это энкодер со встроенной кнопкой. Используется для управления и настройки. Зеленая кнопка переключает режимы индикации на дисплее, прорезь снизу для разъема юсб, три лампочки (слева направо) сигнализируют о наличии напряжения на клеммах, активации защиты при перегрузе, и об ограничении тока. Разъем между клеммами для подключения дополнительных устройств. Я втыкаю туда сверлилку для плат и резалку для оргстекла с нихромовой струной. Засунул все кишки в корпус, подсоединил провода После контрольного включения и калибровки закрыл крышкой.
Фото собранного
Отверстия проделаны под радиатором стабилизатора lm7805, который нехило греется. Подсос воздуха через них решил проблему охлаждения этой детали Сзади выхлопная труба, красная кнопка включения и разъем под сетевой кабель. Прибор обладает кое-какой точностью, китайский мультиметр с ним согласен. Конечно калибровать самопальную махарайку по китайскому мультиметру и говорить о точности достаточно смешно. Несмотря на это прибору найдется место на моем столе, так как для моих целей его вполне достаточно
Подсос воздуха через них решил проблему охлаждения этой детали Сзади выхлопная труба, красная кнопка включения и разъем под сетевой кабель. Прибор обладает кое-какой точностью, китайский мультиметр с ним согласен. Конечно калибровать самопальную махарайку по китайскому мультиметру и говорить о точности достаточно смешно. Несмотря на это прибору найдется место на моем столе, так как для моих целей его вполне достаточно
Некоторые тесты
Взаимодействие с программой. На ней в реальном времени отображается напряжение и ток в виде графиков, так же с помощью этой программы можно управлять блоком питания. К блоку питания подключена 12-вольтовая лампа накаливания и амперметр. Внутренний амперметр после подстройки работает сносно Измерим напряжение на клеммах. Великолепно. В прошивке реализована ваттосчиталка. К блоку подключена все та же лампочка на 12 вольт, на цоколе которой написано «21W». Не самый паршивый результат. Изделием доволен на все сто, поэтому и пишу обзор. Может кому-то из читателей нехватает такого блока питания. О магазинах: Чип-нн порадовал скоростью доставки, но ассортимент маловат на мой взгляд. Этакий интернет магазин, аналогичный арадиомагазину в среднем городке. Цены ниже, кое на что в разы. Чип-дип… закупил там то, чего не было в чип-нн, иначе б не сунулся. розница дороговата, но все есть. Мои исходники:
О магазинах: Чип-нн порадовал скоростью доставки, но ассортимент маловат на мой взгляд. Этакий интернет магазин, аналогичный арадиомагазину в среднем городке. Цены ниже, кое на что в разы. Чип-дип… закупил там то, чего не было в чип-нн, иначе б не сунулся. розница дороговата, но все есть. Мои исходники:
Переделанная схема в протеусе+печатная плата
Животное
животных под руку не подвернулось, есть искусственный слон с испорченной платой для этого блока питания
Источник: https://mysku.ru/blog/russia-stores/34623.html
Регулируемый блок питания своими руками
Мастер, описание устройства которого в первой части, задавшись целью сделать блок питания с регулировкой, не стал усложнять себе дело и просто использовал платы, которые лежали без дела.
Второй вариант предполагает использование еще более распространенного материала – к обычному блоку была добавлена регулировка, пожалуй, это очень многообещающее по простоте решение при том, что нужные характеристики не будут потеряны и реализовать задумку можно своими руками даже не самому опытному радиолюбителю.
В бонус еще два варианта совсем простых схем со всеми подробными объяснениями для начинающих. Итак, на ваш выбор 4 способа.
Блок питания из старой платы компьютера
Stalevik
Мастера покупают изобретения в лучшем китайском интернет-магазине.
Расскажем, как сделать регулируемый блок питания из ненужной платы компьютера. Мастер взял плату компьютера и выпилил блок, питающий оперативку.
Так он выглядит.
Определимся, какие детали нужно взять, какие нет, чтобы отрезать то, что нужно, чтобы на плате были все компоненты блока питания.
Обычно импульсный блок для подачи тока на компьютер состоит из микросхемы, шим контроллера, ключевых транзисторов, выходного дросселя и выходного конденсатора, входного конденсатора. На плате еще и зачем-то присутствует входной дроссель.
Его тоже оставил. Ключевые транзисторы – может быть два, три. Есть посадочное место по 3 транзистор, но в схеме не используется.
Электроника для самодельщиков в китайском магазине.
Сама микросхема шим контроллера может выглядеть так. Вот она под лупой.
Может выглядеть как квадратик с маленькими выводами со всех сторон. Это типичный шим контроллер на плате ноутбука.
Точно также выглядит блок питания для процессора. Видим шим контроллер и несколько каналов питания процессора. 3 транзистора в данном случае. Дроссель и конденсатор. Это один канал.
Три транзистора, дроссель, конденсатор – второй канал. 3 канал. И еще два канала для других целей.
Вы знаете как выглядит шим-контроллер, смотрите под лупой его маркировку, ищите в интернете datasheet, скачиваете pdf файл и смотрите схему, чтобы ничего не напутать.
На схеме видим шим-контроллер, но по краям обозначены, пронумерованы выводы.
Обозначаются транзисторы. Это дроссель. Это конденсатор выходной и конденсатор входной. Входное напряжение в диапазоне от 1,5 до 19 вольт, но напряжение питание шим-контроллера должно быть от 5 вольт до 12 вольт.
То есть может получиться, что потребуется отдельный источник питания для питания шим-контроллера. Вся обвязка, резисторы и конденсаторы, не пугайтесь. Это не нужно знать. Всё есть на плате, вы не собираете шим-контроллер, а используете готовый.
Нужно знать только 2 резистора – они задают выходное напряжение.
Резисторный делитель. Вся его суть в том, чтобы сигнал с выхода уменьшить примерно до 1 вольта и подать на вход шим-контроллера фидбэк – обратная связь. Если вкратце, то изменяя номинал резисторов, можем регулировать выходное напряжение. В показанном случае вместо резистора фидбэк мастер поставил подстроечный резистор на 10 килоом.
Этого оказалось достаточным, чтобы регулировать выходное напряжение от 1 вольта до примерно 12 вольт. К сожалению, не на всех шим-контроллерах это возможно. Например, на шим контроллерах процессоров и видеокарт, чтобы была возможность настраивать напряжение, возможность разгона, выходное напряжение сдается программно по несколькоканальной шине.
Менять выходное напряжение такого шим контроллера можно разве только перемычками.
Итак, зная как выглядит шим-контроллер, элементы, которые нужны, уже можем выпиливать блок питания. Но делать это нужно аккуратно, так как вокруг шим-контроллера есть дорожки, которые могут понадобиться. Например, можно видеть – дорожка идёт от базы транзистора к шим контроллеру. Её сложно было сохранить, пришлось аккуратно выпиливать плату.
Используя тестер в режиме прозвонки и ориентируясь на схему, припаял провода. Также пользуясь тестером, нашел 6 вывод шим-контроллера и от него прозвонил резисторы обратной связи.
Резистор находился рфб, его выпаял и вместо него от выхода припаял подстроечный резистор на 10 килоом, чтобы регулировать выходное напряжение, также путем про звонки выяснил, что питание шим-контроллера напрямую связано со входной линией питания.
Это значит, что не получиться подавать на вход больше 12 вольт, чтобы не сжечь шим-контроллер.
Посмотрим, как блок питания выглядит в работе
Припаял штекер для входного напряжения, индикатор напряжения и выходные провода.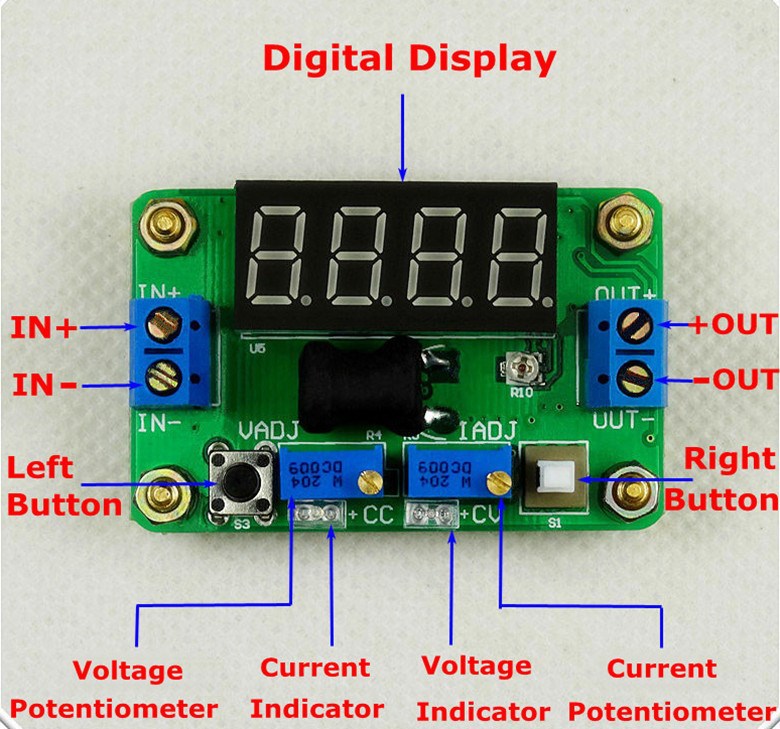 Подключаем внешнее питание 12 вольт. Загорается индикатор. Уже был настроен на напряжение 9,2 вольта. Попробуем регулировать блок питания отверткой.
Подключаем внешнее питание 12 вольт. Загорается индикатор. Уже был настроен на напряжение 9,2 вольта. Попробуем регулировать блок питания отверткой.
Это так называемое дежурное напряжение. Два источника на 3,3 вольта и 5 вольт. Сделал ему на 3d принтере корпус. Также можете посмотреть статью, где делал похожий регулируемый блок питания, тоже вырезал из платы ноутбука (https://electro-repair.livejournal.com/3645.html). Это тоже шим контроллер питания оперативной памяти.
Как сделать регулирующий БП из обычного, от принтера
Пойдет речь о блоке питания принтера canon, струйный. Они много у кого остаются без дела. Это по сути отдельное устройство, в принтере держится на защелке.
Его характеристики: 24 вольта, 0,7 ампера.
Понадобился блок питания для самодельной дрели. Он как раз подходит по мощности. Но есть один нюанс – если его так подключить, на выходе получим всего лишь 7 вольт. Тройной выход, разъёмчик и получим всего лишь 7 вольт.
Как получить 24 вольта?
Как получить 24 вольта, не разбирая блок?
Ну самый простой – замкнуть плюс со средним выходом и получим 24 вольта.
Попробуем сделать. Подключаем блок питания в сеть 220. Берем прибор и пытаемся измерить.
Подсоединим и видим на выходе 7 вольт.
У него центральный разъем не задействован. Если возьмем и подсоединим к двум одновременно, напряжение видим 24 вольта. Это самый простой способ сделать так, чтобы данный блок питания не разбирая, выдавал 24 вольта.
Необходим самодельный регулятор, чтобы в некоторых пределах можно было регулировать напряжение. От 10 вольт до максимума. Это сделать легко. Что для этого нужно? Для начала вскрыть сам блок питания. Он обычно проклеен. Как вскрыть его, чтобы не повредить корпус.
Не надо ничего колупать, поддевать. Берем деревяшку помассивнее либо есть киянка резиновая. Кладем на твердую поверхность и по шву лупим. Клей отходит. Потом по всем сторонам простучали хорошенько. Чудесным образом клей отходит и все раскрывается.
Внутри видим блок питания.
Достанем плату. Такие бп легко переделать на нужное напряжение и можно сделать также регулируемый. С обратной стороны, если перевернем, есть регулируемый стабилитрон tl431. С другой стороны увидим средний контакт идет на базу транзистора q51.
Если подаем напряжение, то данный транзистор открывается и на резистивном делителе появляется 2,5 вольта, которые нужно для работы стабилитрона. И на выходе появляется 24 вольта. Это самый простой вариант. Как его завести можно еще – это выбросить транзистор q51 и поставить перемычку вместо резистора r 57 и всё. Когда будем включать, всегда на выходе непрерывно 24 вольта.
Как сделать регулировку?
Можно изменить напряжение, сделать с него 12 вольт. Но в частности мастеру, это не нужно. Нужно сделать регулируемый. Как сделать? Данный транзистор выбрасываем и вместо резистор 57 на 38 килоома поставим регулируемый. Есть старый советский на 3,3 килоома. Можно поставить от 4,7 до 10, что есть.
От данного резистора зависить только минимальное напряжение, до которого он сможет опускать его. 3,3 -сильно низко и не нужно. Двигатели планируется поставить на 24 вольта. И как раз от 10 вольт до 24 – нормально. Кому нужно другое напряжение, можно большого сопротивления подстроечный резистор.
Приступим, будем выпаивать.
Берём паяльник, фен. Выпаял транзистор и резистор.
Подпаял переменный резистор и попробуем включить. Подал 220 вольт, видим 7 вольт на нашем приборе и начинаем вращать переменный резистор.
Напряжение поднялось до 24 вольт и плавно-плавно вращаем, оно падает – 17-15-14 то есть снижается до 7 вольт. В частности установлено на 3,3 ком. И наша переделка оказалась вполне успешной.
То есть для целей от 7 до 24 вольт вполне приемлемая регулировка напряжения.
Такой вариант получился. Поставил переменный резистор. Ручку и получился регулируемый блок питания – вполне удобный.
Видео канала “Технарь”.
Такие блоки питания найти в Китае просто. Наткнулся на интересный магазин, который продает б/у блоки питания от разных принтеров, ноутбуков и нетбуков.
Наткнулся на интересный магазин, который продает б/у блоки питания от разных принтеров, ноутбуков и нетбуков.
Они разбирают и продают сами платы, полностью исправные на разные напряжения и токи.
Самый большой плюс – это то, что они разбирают фирменную аппаратуру и все блоки питания качественные, с хорошими деталями, во всех есть фильтры.
Фотографии – разные блоки питания, стоят копейки, практически халява.
Простой блок с регулировкой
Простой вариант самодельного устройства для питания приборов с регулировкой. Схема популярная, она распространена в Интернете и показала свою эффективность. Но есть и ограничения, которые показаны на ролике вместе со всеми инструкциями по изготовлению регулированного блока питания.
Самодельный регулированный блок на одном транзисторе
Какой можно сделать самому самый простой регулированный блок питания? Это получится сделать на микросхеме lm317. Она уже сама с собой представляет почти блок питания.
На ней можно изготовить как регулируемый по напряжению блок питания, так и потоку. В этом видео уроке показано устройство с регулировкой напряжения. Мастер нашёл несложную схему. Входное напряжение максимальное 40 вольт.
Выходное от 1,2 до 37 вольта. Максимальный выходной ток 1,5 ампер.
Скачать схему с платой.
Без теплоотвода, без радиатора максимальная мощность может быть всего 1 ватт. А с радиатором 10 ватт. Список радиодеталей.
Приступаем к сборке
Подключим на выход устройства электронную нагрузку. Посмотрим, насколько хорошо держит ток. Выставляем на минимум. 7,7 вольта, 30 миллиампер.
Всё регулируется. Выставим 3 вольта и добавим ток. На блоке питания выставим ограничения только побольше. Переводим тумблер в верхнее положение. Сейчас 0,5 ампера. Микросхема начал разогреваться. Без теплоотвода делать нечего. Нашёл какую-то пластину, ненадолго, но хватит. Попробуем еще раз. Есть просадка. Но блок работает. Регулировка напряжения идёт. Можем вставить этой схеме зачёт.
Можем вставить этой схеме зачёт.
Видео Radioblogful. Видеоблог паяльщика.
Источник: https://izobreteniya.net/reguliruemyiy-blok-pitaniya/
РадиоКот :: БП с микроконтроллерным управлением и регулировкой параметров при помощи энкодера
Добавить ссылку на обсуждение статьи на форумеРадиоКот >Схемы >Питание >Блоки питания >
| Теги статьи: | Добавить тег |
БП с микроконтроллерным управлением и регулировкой параметров при помощи энкодера.
Идея блока питания была взята на сайте. Хотелось что бы параметры блока устанавливались с помощью энкодера. Для этого пришлось немного изменить схему и программу.
В результате получилась схема:
Управление напряжением и током стабилизации осуществляется встроенным в контроллер ШИМ ом.
Его скважность регулируется энкодером, каждый шаг которого приводит к увеличению или уменьшению опорных напряжений по напряжению и току и как следствие к изменению напряжения на выходе БП или тока стабилизации.
При нажатии на кнопку энкодера на индикаторе напротив изменяемого параметра появляется стрелка и при последующем вращении изменяется выбранный параметр.
Если в течении некоторого времени не проводить никаких действий система управления переходит в ждущий режим и не реагирует на вращение энкодера.
Установленные параметры сохраняются в энергонезависимой памяти и при последующем включении устанавливаются по последнему выставленному значению. Индикатор в верхней строке отображает измеренное напряжение и ток.
В нижней строке отображается установленный ток ограничения. При выполнении условия Iizm>Iset БП переходит в режим стабилизации тока.
За основу был взят БП АТХ CODEGEN, который был переделан под напряжение 20В и добавлена плата управления.
В результате получился вот такой вот блок питания:
Файлы: Прошивка МК.
Вопросы, как обычно, складываем тут.
| Как вам эта статья? | Заработало ли это устройство у вас? |
Источник: https://www. radiokot.ru/circuit/power/supply/19/
radiokot.ru/circuit/power/supply/19/
Блок питания с регулировкой тока и напряжения
Попалась в интернете недавно любопытная схемка простого, но довольно неплохого блока питания начального уровня, способного выдавать 0-24 В при ток до 5 ампер.
В блоке питания предусмотрена защита, то есть ограничение максимального тока при перегрузке. В приложенном архиве есть печатная плата и документ, где приведено описание настройки данного блока, и ссылка на сайт автора.
Прежде чем собирать, прочитайте внимательно описание.
Схема БП с регулировкой тока и напряжения
Изначально на фото печатной платы автора были ошибки, печатка была скопирована и доработана, ошибки устранены.
Вот фото моего варианта БП, вид готовой платы, и можно посмотреть как примерно применить корпус от старого компьютерного ATX. Регулировка сделана 0-20 В 1,5 А. Конденсатор С4 под такой ток поставлен на 100 мкФ 35 В.
При коротком замыкании максимум ограниченного тока выдается и загорается светодиод, вывел резистор ограничителя на переднюю панель.
Индикатор для блока питания
Провёл у себя ревизию, нашёл пару простеньких стрелочных головок М68501 для этого БП. Просидел пол дня над созданием экрана для него, но таки нарисовал его и точно настроил под требуемые выходные напряжения.
Сопротивление используемой головки индикатора и применённый резистор указаны в прилагаемом файле на индикаторе.
Выкладываю переднюю панель блока, если кому понадобится для переделки корпус от блока питания АТХ, проще будет переставить надписи и что-то добавить, чем создавать с нуля.
Если потребуются другие напряжения, шкалу можно просто подкалибровать, это уже проще будет. Вот готовый вид регулируемого источника питания:
Плёнка — самоклейка типа «бамбук». Индикатор имеет подсветку зелёного цвета. Красный светодиод Attention указывает на включившуюся защиту от перегрузки.
Дополнения от BFG5000
Максимальный ток ограничения можно сделать более 10 А. На кулер — кренка 12 вольт плюс температурный регулятор оборотов — с 40 градусов начинает увеличивать обороты. Ошибка схемы особо не влияет на работу, но судя по замерам при КЗ — появляется прирост проходящей мощности.
Силовой транзистор установил 2n3055, все остальное тоже зарубежные аналоги, кроме BC548 — поставил КТ3102. Получился действительно неубиваемый БП. Для новичков-радиолюбителей самое-то.
Выходной конденсатор поставлен на 100 мкФ, напряжение не скачет, регулировка плавная и без видимых задержек. Ставил из расчёта как указано автором: 100 мкф ёмкости на 1 А тока. Авторы: Igoran и BFG5000.
Форум по БП
Обсудить статью Блок питания с регулировкой тока и напряжения
Источник: https://radioskot.ru/publ/bp/blok_pitanija_s_regulirovkoj_toka_i_naprjazhenija/7-1-0-887
Блок питания с регулировкой напряжения и тока 3 — DRIVE2
Всем привет! Давно хочу написать, но все не хватает времени, а сегодня вот как-то не могу найти чем заняться…напишу об очередной доработке блока питания. Предыдущая часть здесь www.drive2.ru/b/2195993/
Блок питания активно использовался все это время, и показал себя с отличной стороны. Использовал его в основном для всяких поделок и несколько раз для подкачки колес компрессором.
Подкачка колес была непростым испытанием, ток несколько раз переваливал за 10А.
Насчет самого блока питания, я не сомневался, что он выдержит такую нагрузку, но вольтамперметр рассчитан на ток до 10А, а глядя на проводки которыми он подключается и разъем, думаю, и того меньше! Но все на удивление выдержало.
Полный размер
Качаем колеса
Полный размер
Качаем колеса
И вот решил я расширить универсальность прибора, добавив ограничение по току, чтобы можно было заряжать автомобильный аккумулятор, да и любой другой аккум. В инете есть много схем о переделке компьютерного БП с ограничением по току.
Как и с регулировкой напряжения, с ограничением по току может справляться все та же TL494. Но эти переделки показались мне слишком сложными, и я решил пойти другим путем. На али был найден подходящий понижающий DC-DC преобразователь с регулировкой напряжения и тока. Вот ссылочка.
Вход от 7 до 32В, выход — от 0,8 до 28В, максимальный ток 12А.
DC-DC преобразователь на 12А с Али
После этого я принялся все переделывать. Выбросил все лишнее из БП, убрал регулировку напряжения, впаял в плату подстроечный резистор и выставил напряжение около 17В, чтобы на выходе было около 15В. Все провода заменил на качественный медный провод сечением более 3 квадратов.
Все разъемы выкинул, все на пайке. К вольтамперметру тоже протянул нормальный провод и припаял прямо к плате. Преобразователь закрепил внутри корпуса. Вентилятор запитал от шины +5В (на ней сейчас около 7В). Добавил на корпус резиновые ножки.
Вообщем все сделал не на страх, а на совесть.
Полный размер
С преобразователем внутри
Полный размер
С преобразователем внутри
Полный размер
С преобразователем внутри
Теперь всем доволен…почти))) Хочу еще вентилятор переставить, чтобы он вдувал воздух вовнутрь, но имеющийся кулер этого не позволяет сделать, так как крепеж у него только с одной стороны. И пора обновить красочку. Уже перестал считать, во сколько он мне обошелся, так как наверное уже смог бы купить готовый аналогичный БП, но самому сделать ведь интереснее))
Полный размер
актуальное состоянии
Полный размер
актуальное состоянии
Спасибо за внимание! Делитесь своими поделками))
Источник: https://www.drive2.ru/b/3148330/next
Сборка блока питания с регулировкой тока/напряжения своими руками
Вот очередная версия лабораторного блока питания с напряжением от 0 до 30 В и регулировкой потребляемого тока 0-2 А, что всегда бывает полезно, когда используется БП для настройки самодельных схем или когда они неизвестные приборы запускаются в первый раз.
Схема ИП с регулировкой тока и напряжения
Сама схема питания — это популярный комплект из таких элементов:
- Сам регулируемый стабилизатор, в котором заменен T1 — BC337 на BD139, T2 — BD243 на BD911
- D1-D4 — диоды 1N4001 заменены на RL-207
- C1 — 1000 мкФ / 40 В заменен на 4700 мкФ / 50 В
- D6, D7 — 1N4148 на 1N4001
У используемого трансформатора есть напряжения: 25 В, 2 А и 12 В, которое полезно для управления вентилятором, охлаждающим радиатор и силовые диоды на панели. Для этого была создана небольшая плата с мостовым выпрямителем, фильтрующими конденсаторами и стабилизатором LM7812 (с радиатором).
Внутри корпуса лабораторного источника питания размещены трансформатор, плата самого регулируемого блока питания, платы стабилизаторов — 12 В и 24 В, радиатор с охлаждающим вентилятором (запускается при 50 С).
На передней части корпуса установлены выключатель, три светодиода, информирующих о состоянии блока питания (сеть 220 В, включение вентилятора и защита — ограничение тока или короткое замыкание), синие и красные LED дисплеи с наклеенной на них затемняющей пленкой. Рядом с дисплеями расположены регулирующие потенциометры, а справа выводы питания. На задней части корпуса имеется разъем для сети, предохранитель и охлаждающий вентилятор 60×60 мм.
Полезное: Детектор аудио сигнала для включения по звуку
Что касается индикаторных дисплеев, они показывают:
- синий — текущее напряжение в вольтах V
- красный — текущий ток в амперах A
Источник питания получился реально удобный и надёжный. Вся сборка заняла несколько дней. Что касается охлаждения, оно включается только при высокой нагрузке и то на короткое время, примерно на пару минут.
С этим БП удобно работать даже при слабом освещении, так как яркости индикаторов хватает с головой. Если хотите повысить ток до 3-4 ампера, выбирайте трансформатор по-мощнее и транзисторы регулятора, с хорошим запасам по току. Ещё пару неплохих схем источников питания смотрите по ссылкам:
6— 4,50
НАЖМИТЕ ТУТ И ОТКРОЙТЕ КОММЕНТАРИИ
Источник: https://2shemi.ru/sborka-bloka-pitaniya-s-regulirovkoj-svoimi-rukami/
Блок питания с микроконтроллерным управлением
Состоит из блока индикации и управления, измерительной части и блока защиты от КЗ.
Блок индикации и управления.
Индикатор — ЖКИ дисплей на основе контроллера НD44780, 2 сточки по 16 символов. Управление напряжением осуществляется встроенным в контроллер ШИМ ом.
Его скважность регулируется энкодером, каждый шаг которого приводит к увеличению или уменьшению напряжения на 0,1 вольт на выходе БП. Полный оборот энкодера – 2 вольта.
Поскольку ШИМ может изменять напряжение на накопительной емкости лишь в интервале от 0 до 5 вольт, применен ОУ с коэффициентом усиления 5. Таким образом фактическое напряжение на выходе БП регулируется в пределах 0 – 25 вольт.
Регулирующим элементом является мощный составной транзистор КТ827А. С эмиттера регулирующего транзистора через верхнее плечо делителя (2 Х 8,2 к) осуществляется обратная связь, благодаря чему даже при больших токах в нагрузке напряжение поддерживается на строго заданном уровне вплоть до сотых долей вольта.
Измерительная часть – двухканальный АЦП (Микрочип), измеряющий реальное напряжение на выходе БП и падение напряжения на шунтирующем резисторе, усиленное ОУ, что прямо пропорционально потребляемому нагрузкой току. Сердцем конструкции является контроллер.
Блок защиты от короткого замыкания в нагрузке. Выполнен виде отдельного устройства включенного между выпрямителем и регулирующим элементом. Ток срабатывания защиты — 5 А. Подбирается резистором 47к в базовой цепи транзистора управляющего ключом КТ825Г.
Настройка.
Заключается в подборе резисторов, обозначенных звездочкой, для соответствия показаний ЖКИ реальным току и напряжению на выходе БП.
Детали.
Шунт взят из разбитого мультиметра, его сопротивление около 0,01 Ом. Исходное состояние контактов энкодера описано в принципиальной схеме, он может быть любой соответствующий этим состояниям. Кроме вращения, он имеет вн контакты, которые замыкаются без фиксации при нажатии на вал.
Транзисторы n-p-n без маркировки могут быть КТ315 или любыми маломощными, подобными им в чип корпусе. Транзистор p-n-p в ключе, управляющем подсветкой может быть любой средней мощности.
Как пользоваться БП.
Энкодером регулируется напряжение 0 – 25 вольт с шагом 0,1 вольта. При кратком (менее 0,5 сек) нажатии на ручку включается/выключается подсветка. При нажатии более 0,5 сек происходит запись установленного напряжения в энергонезависимую память контроллера.
Полный проект для MPLAB вы можете скачать ниже.
Список радиоэлементов
Скачать список элементов (PDF)
Прикрепленные файлы:
Blaze Опубликована: 2008 г. 3 Вознаградить Я собрал 0 1
x
- Техническая грамотность
- Актуальность материала
- Изложение материала
- Полезность устройства
- Повторяемость устройства
- Орфография
Источник: https://cxem.net/pitanie/5-172.php
vip-cxema.org — Мощный стабилизатор тока и напряжения на TL494
Этот стабилизатор обладает неплохими характеристиками, имеет плавную регулировку тока и напряжения, хорошую стабилизацию, без проблем терпит короткие замыкания, относительно простой и не требует больших финансовых затрат.
Он обладает высоким кпд за счет импульсного принципа работы, выходной ток может доходить до 15 ампер, что позволит построить мощное зарядное устройство и блок питания с регулировкой тока и напряжения.
При желании можно увеличить выходной ток до 20-и и более ампер.
В интернете подобных устройств, каждое имеет свои достоинства и недостатки, но принцип работы у них одинаковый. Предлагаемый вариант — это попытка создания простого и достаточно мощного стабилизатора.
За счет применения полевых ключей удалось значительно увеличить нагрузочную способность источника и снизить нагрев на силовых ключах. При выходном токе до 4-х ампер транзисторы и силовой диод можно не устанавливать на радиаторы.
Номиналы некоторых компонентов на схеме могут отличаться от номиналов на плате, т.к. плату разрабатывал для своих нужд.
Диапазон регулировки выходного напряжения от 2-х до 28 вольт, в моем случае максимальное напряжение 22 вольта, т.к.
я использовал низковольтные ключи и поднять напряжение выше этого значения было рискованно, а так при входном напряжении около 30 Вольт, на выходе спокойно можно получить до 28-и Вольт.
Диапазон регулировки выходного тока от 60mA до 15A Ампер, зависит от сопротивления датчика тока и силовых элементов схемы.
- Устройство не боится коротких замыканий, просто сработает ограничение тока.
- Собран источник на базе ШИМ контроллера TL494, выход микросхемы дополнен драйвером для управления силовыми ключами.
Хочу обратить ваше внимание на батарею конденсаторов установленных на выходе. Следует использовать конденсаторы с низким внутренним сопротивлением на 40-50 вольт, с суммарной емкостью от 3000 до 5000мкФ.
Нагрузочный резистор на выходе применен для быстрого разряда выходных конденсаторов, без него измерительный вольтметр на выходе будет работать с запаздыванием, т.к.
при уменьшении выходного напряжения конденсаторам нужно время, для разрядки, а этот резистор быстро их разрядит. Сопротивление этого резистора нужно пересчитать, если на вход схемы подается напряжение больше 24-х вольт.
Резистор двух ваттный, рассчитан с запасом по мощности, в ходе работы может греться, это нормально.
Как это работает:
ШИМ контроллер формирует управляющие импульсы для силовых ключей. При наличии управляющего импульса транзистор, и питание по открытому каналу транзистора через дроссель поступает на накопительный конденсатор. Не забываем, что дроссель является индуктивной нагрузкой, которым свойственно накапливание энергии и отдача за счет самоиндукции.
Когда транзистор закрывается накопленный в дросселе заряд через диод шоттки продолжит подпитывать нагрузку. Диод в данном случае откроется, т.к. напряжение с дросселя имеет обратную полярность. Этот процесс будет повторяться десятки тысяч раз в секунду, в зависимости от рабочей частоты микросхемы ШИМ.
По факту ШИМ контроллер всегда отслеживает напряжение на выходном конденсаторе.
Стабилизация выходного напряжения происходит следующим образом. На неинвертирующий вход первого усилителя ошибки микросхемы (вывод 1) поступает выходное напряжение стабилизатора, где оно сравнивается с опорным напряжением, которое присутствует на инверсном входе усилителя ошибки.
При снижении выходного напряжения будет снижаться и напряжение на выводе 1, и если оно будет меньше опорного напряжения, ШИМ контроллер будет увеличивать длительности импульсов, следовательно транзисторы больше времени будут находиться в открытом состоянии и больше тока будет накачиваться в дроссель, если же выходное напряжение больше опорного, произойдет обратное — микросхема уменьшит длительность управляющих импульсов. Указанным делителем можно принудительно менять напряжение на неинвертирующщем входе усилителя ошибки, этим увеличивая или уменьшая выходное напряжение стабилизатора в целом. Для наиболее точной регулировки напряжения применён подстроечный многооборотный резистор, хотя можно использовать обычный.
Минимальное выходное напряжение составляет порядка 2 вольт, задается указанным делителем, при желании можно поиграться с сопротивлением резисторов для получения приемлемых для вас значений, не советуется снижать минимальное напряжение ниже 1 вольта.
Для отслеживания потребляемого нагрузкой тока установлен шунт. Для организации функции ограничения тока задействован второй усилитель ошибки в составе ШИМ контроллера тл494.
Падение напряжения на шунте поступает на неинвертирующий вход второго усилителя ошибки, опять сравнивается с опорным, а дальше происходит точно тоже самое, что и в случае стабилизации напряжения.
Указанным резистором можно регулировать выходной ток.
- Токовый шунт изготовлен из двух параллельно соединённых низкоомных резисторов с сопротивлением 0,05Ом.
- Накопительный дроссель намотан на желто белом кольце от фильтра групповой стабилизации компьютерного блока питания.
Так как схема планировалась на довольно большой входной ток, целесообразно использовать два сложенных вместе кольца. Обмотка дросселя содержит 20 витков намотанных двумя жилами провода диаметром 1,25мм в лаковой изоляции, индуктивность около 80-90 микрогенри.
- Диод желательно использовать с барьером Шоттки и обратным напряжением 100-200 вольт, в моем случае применена мощная диодная сборка MBR4060 на 60 вольт 40 Ампер.
Силовые ключи вместе с диодом устанавливают на общий радиатор, притом изолировать подложки компонентов от радиатора не нужно, т.к. они общие.
- Подробное описание и испытания блока можно посмотреть в видео
Печатная плата тут
Источник: http://vip-cxema.org/index.php/home/bloki-pitaniya/422-impulsnyj-stabilizator-toka-i-napryazheniya
Регулировка тока БП
LampyЗагрузка
09.09.2017
1121
Вопросы и ответы Здравствуйте!Купил вот такой БП на 30 ампер. У него есть крутилка (подписана VR1). Она для того, чтобы можно было уменьшить выходной ток?
Ответы на вопросыПопулярные вопросы
henkoseЗагрузка
27.03.2021
836
Тут среда технически образованная. Кидайте идеи, а то у меня доставка с али застряла
Читать дальше STALSAN_1992Загрузка
17.04.2021
306
Рошу помощи с вопросом. Пытаюсь скомпилировать прошивку для ANET A8pluse. Как ни пытаюсь (неделю) ни выходит. Подскажте в чём может быть причина?После…
Читать дальше serz55Загрузка
19.08.2018
6245
нашел четыре недорогих принтера. по описанию только на АНЕТ А6 много инфы а вот на остольные нпочти нету! подскажите какой из переч…
Читать дальшеКак регулировать мощность переменного тока / Хабр
Решил как-то отец собрать для дачи некое устройство, в котором, по его заверению, можно будет варить сыр. Устройство сие вид имело могучий и представляло из себя железный короб, подозрительно напоминающий старую стиральную машинку. Внутрь короба (все также добротно!) были вмонтированы три тэна по 1700 Ватт каждый. В общем сыра должно было хватить на небольшой посёлок.
Изделие (внешне выглядящее как что-то из безумного макса), должно быть весьма технологичным и поддерживать заданную температуру в максимально узких пределах. Для этого рядом появилась ещё одна коробка с симисторами, к которым подключались ТЭНы и схема, выдающая высокий уровень при переходе синусоиды через ноль. А у меня появился интересный проект.
Итак нам нужно выходить на заданную температуру и поддерживать её, с этим должен справляться алгоритм ПИД регулятора. Глубоко вдаваться в его работу не буду, скажу лишь что он получает на вход текущую ошибку, а на выходе выдает какое-то число в заданных пределах. У меня таким числом будет мощность выдаваемая на ТЭН, хотя в принципе, это может быть любой инерционный процесс, например обороты двигателя. Что важно для ПИД регулятора, это чтобы выходная величина производила воздействие линейно. Поэтому попробуем разобраться в способах регулировки мощности и их линейности.
Как вообще регулируется мощность?
Мощность — это произведение силы тока на напряжение. Если представить это произведение графически, то для постоянного тока, это будет площадь прямоугольника со сторонами равными напряжению и току
Так как при постоянном сопротивлении и напряжении ток тоже будет постоянным, то заменим ось тока на ось времени. Сопротивление я беру постоянным для объяснения принципа регулирования.
Тогда при заданном напряжении (12 В) и сопротивлении в 12 Ом, по закону Ома: I=U/R, получаем ток равный 1 А, и соответственно мощность за единицу времени будет равна 12 Вт. При другом сопротивлении мощность, естественно тоже изменится.
Теперь, если мы хотим регулировать мощность за единицу времени, нам нужно как-то изменять площадь фигуры за единицу времени. Самым чистым способом будет просто изменять напряжение, тогда и мощность будет пропорционально изменяться. Но контроллер, как и любые цифровые устройства, не умеет плавно изменять напряжение на ножках, он может либо «поднимать» их до высокого уровня, либо «опускать» до низкого уровня. Этот недостаток он компенсирует скоростью, даже самый дохленький современный МК может работать на частотах в миллионы тактов в секунду. Чтобы регулировать мощность, контроллер будет очень быстро «дрыгать» ножкой, тем самым изменяя результирующая площадь импульса за единицу времени.
На этом принципе устроена широтно-импульсная модуляция, она же ШИМ. Изменяя время (ширину) импульса за период мы изменяем выдаваемую мощность. На рисунке выше, показано два периода ШИМа. Каждый период имеет отношение площади импульса к площади всего периода 0.5, те половину времени периода контроллер выдает высокий уровень сигнала, другую половину низкий. Отношение времени высокого уровня сигнала к времени низкого называется скважностью. Красная линия на графике отражает результирующую мощность за единицу времени, по ней видно что при скважности 0.5 мощность также упала на половину (с 12 до 6 Вт). Хорошая новость состоит в том, что, ШИМ в контроллерах реализован аппаратно. Так что для регулирования чего-то достаточно его запустить и, по необходимости, изменять скважность.
Для постоянного тока, режим ШИМа оптимален, причем чем более инерционный прибор мы к нему подключаем, тем меньшую частоту ШИМа можно использовать. Для большого ТЭНа достаточно чуть ли не одного герца, а вот для светодиодов лучше использовать частоту побольше. Кстати частота ШИМа в подсветке экрана ноутбука, зачастую оказывается чуть ли не решающим фактором при покупке, так как, при слишком низкой частоте, глаза будут быстро уставать.
Если попробовать провернуть трюк с ШИМом для переменного напряжения, мы увидим что все сломалось и мощность перестала регулироваться линейно
одинаковые промежутки времени стали давать нам разную площадь, а значит разную мощность. Однако, если разбить полученные отрезки на на ещё более мелкие, то процентное соотношение ширины импульса к ширине кусочка будет выравниваться.
Если мы возьмем равный процент выдаваемой мощности от каждого кусочка, в результате мы получим такой же процент, от мощности всей волны, а на выходе мы получим линейный регулятор мощности для переменного тока. Причем чем большую частоту будет иметь ШИМа, тем на большее количество кусочков он разобьет синусоиду, а значит мы получим большую линейность.
Это было бы решением всех проблем, но в моем случае устройством коммутировавшим нагрузку был не быстрый транзистор, а симистор — медленный прибор, с максимальными рабочими частотами в пределах нескольких сотен герц, к тому же симистор можно только открыть, закроется он сам при переходе через ноль. На таких частотах управлять переменным напряжением которое имеет частоту 50 Гц, линейно не получится. Поэтому здесь нужно использовать какой-то другой подход и как раз для него, помимо симисторов, была установлена схема перехода через ноль.
В случае с симисторами лучше разбить синусоиду на куски с одинаковыми площадями и записать время каждого такого кусочка в таблицу. Тогда каждое последующее значение из таблицы будет линейно увеличивать мощность.
На графике выше полуволна синусоиды разбита на части разные по времени, но имеющие одинаковую площадь, а значит несущие в себе одинаковую мощность. Все что нам останется сделать это загрузить таблицу с временными интервалам в наш котроллер, синхронизировать какой-то из его таймеров с частотой синусоиды, для этого используется схема перехода через ноль, и просто брать из таблички нужное значение, в течении которого будет высокий уровень. Суть метода похожа на ШИМ, но немного доработанный и синхронизированный с источником переменного напряжения.
Расчёт таблицы мощности
Теперь можно перейти непосредственно к расчёту.
Изначально задача заключается в том чтобы разбить синусоиду на нужное нам количество кусочков, каждый из которых будет иметь одинаковую площадь. На этом моменте, обычно проступает холодный пот, так-как площадь под графиком это и есть геометрическое определение интеграла. Соответственно нам нужно будет взять интеграл от функции при этом определить такие пределы интегрирования, которые будут давать одинаковый результат. Затем (как будто расчёта интегралов мало!) полученные пределы нужно будет перевести во время задержки (время в течении которого будет сохранятся высокий уровень). После чего полученное время перевести в понятное для контроллера число — количество тиков таймера. Звучит страшно, а по факту сейчас разберёмся:
Во первых сама функция — как было написано выше мощность это произведение тока на напряжение, для переменного тока (без сдвига фаз), это утверждение также верно, но, так-как и ток и напряжение меняются со временем P=IU превращается в P=I*sin(t) * U*sin(t).2(t).
Неопределённый интеграл от квадрата синуса
Теперь нужно подобрать пределы для определенных интегралов. Выберем, насколько частей мы хотим разбить нашу синусоиду: я выбрал сто, чтобы можно было регулировать мощность с шагом в 1%.
Итак мы нашли чему будет равен неопределённый интеграл и даже выбрали шаг. Теперь нужно подобрать пределы интегрирования. Смысл их подбора заключается в том, чтобы значение определенного интеграла было постоянным при их смене. Напомню, что неопределенный интеграл это формула, а определённый вполне конкретное число. Определённый интеграл считается по формуле:
То есть мы берем неопределённый интеграл, подставляем в него верхнее число, затем нижнее, и вычитаем второе из первого.
Наш неопределённый интеграл является смешанной тригонометрической функцией, а значит не имеет общего аналитического решения. Чаще всего такие функции решаются либо числовыми, либо графическими методами. Графический метода заключается в том что мы строим графики для правой и левой части уравнения их пересечение будет решением уравнения. На рисунке показано решение уравнения для 0.2
Наряду с графическим методом можно использовать численный, то есть подбор решения. Будем подставлять в неопределённый интеграл числа до тех пор пока не найдём решение). Можно использовать лист и бумажку чтобы попрактиковаться в математике, можно онлайн калькулятор, я же буду использовать Python и библиотеки numpy:
import numpy as np
rad_arr=list()
#записываем неопределённый интеграл
integral=lambda rad: (rad/2)-(math.sin(2*rad)/4)
#составляем простенький цикл для подбора решений
for x in np.arange(0, 0.78, 0.015):
#шаг подбора
for xx in np.arange(0, 3, 0.00001):
if func(xx) >= x:
print(xx)
rad_arr.append
break;Отлично мы получили массив чисел (пределов интегрирования!), валидность этих чисел можно проверить подставив их в интеграл. В результате должна получится площадь равная выбранному шагу! Теперь, если подставить полученные числа на график мощности, должна получится следующая картина:
Если все сошлось, то можно двигаться дальше и задать получившимся числам размерность времени, потому что сейчас они в радианах. Чтобы это сделать нужно выяснить угловую скорость, для частоты сети, то есть количество радиан в секунду.
Тогда узнаем сколько сколько длится одна радиана
Теперь, значения задержек в радианах, превратим во время, умножив каждое значение на период радианы (T). Проверим ход своей мысли: действительно-ли получится время задержки, если умножить задержку, на период? Задержка имеет размерность радиан, период — секунд за радиану, мы хотим их перемножить. Тогда рад * ( сек / рад ) = сек. Мы получили время, а значит ход мыслей должен быть верным.
Для расчётов я опять предпочту python:
#стандартная частота сети
frequency = 50
#находим частоту в радианах
rad_per_s=frequency*(2*math.pi)
#находим период радианы
s_per_rad=1/rad_per_s
#находим задержки используя полученный ранее массив
delay_arr=[x*s_per_rad for x in rad_arr]На этом моменте мы получили универсальную таблицу задержек, теперь необходимо конвертировать её специально под микроконтроллер.
Расчёт таймера МК и перевод таблицы
Время необходимо перевести в понятную для МК величину — количество переполнений таймера. Но сначала необходимо определится с частотой таймера: чем выше частота, тем точнее он будет отмерять время, но с другой стороны, тем меньше времени будет оставаться на выполнение остальной программы. Здесь необходимо найти золотую середину.
Для определения минимально допустимой частоты таймера, надо найти числа в массиве с минимальной разностью между ними. Разность тем меньше, чем ближе в максимуму синусоиды мы двигаемся. Тогда возьмем задержку при которой синусоида достигает единицы и число перед ним, после чего найдем их разность:
5 мс — 4.9363 мс = 0.0636 мс
Получившееся число является максимально допустимым периодом между прерываниями таймера, тогда через него найдём минимально допустимую частоту
1 / 0.0636 = 15 КГц
Значит для заданной точности в 1% будет достаточно таймера с частотой 15КГц. Частота МК составляет 16 МГц, значит между прерываниями будет 1000 тактов процессора, этого достаточно для выполнения остальной части программы, так что можно смело настраивать таймер на заданную частоту.
Для настройки таймера на определенную частоту, не кратную тактирующей используется режим таймера CTC — Clear Timer on Compare. В этом режиме таймер досчитывает до заданного числа и сбрасывается, после чего операция повторяется. Число при котором будет происходить совпадение считается по формуле
Число = Тактовая частота МК / предделитель таймера / выбранная частота
Частота выбрана, теперь нужно перевести таблицу в тики таймера. Делать я это буду опять на Python
#задаем частоту таймера
generator_freg=15000
#получаем время одного периода таймера
one_tick=1/generator_freq
#получаем массив с тиками таймера
tick_arr=[x/one_tick for x in delay_arr]В общем-то на этом весь расчёт окончен, остается только отзеркалить получившийся массив для второй половины полуволны и загрузить в МК. Далее по прерыванию от синхроимпульса, нужно подать низкий уровень, на ножку управления симистором, запустить таймер и считать его переполнения (совпадения, тк. у нас режим CTC). Как только количество переполнений достигнет нужного числа из таблички, подаем высокий уровень на управляющую ножку. На этом линейный регулятор мощности переменного напряжения готов!
Заключение
Надеюсь статья была понятна и её было интересно читать. В дополнение хотелось бы сказать, сигнал перехода через ноль не приходит идеально вовремя, поэтому может потребоваться дополнительная коррекция, чтобы это исправить.
Код расчетов на python
import math
import numpy as np
rad_arr=list()
integral=lambda rad: (rad/2)-(math.sin(2*rad)/4)
for x in np.arange(0, 0.78, 0.015):
for xx in np.arange(0, 3, 0.00001):
if func(xx) >= x:
print(xx)
rad_arr.append
break;
frequency = 50
rad_per_s = frequency * (2 * math.pi)
s_per_rad = 1 / rad_per_s
delay_arr = [x * s_per_rad for x in rad_arr]
generator_freg = 15000
one_tick = 1 / generator_freg
tick_arr = [x / one_tick for x in delay_arr]
print(tick_arr)
Также, если кому-то будет интересно, могу поделится исходником готового регулятора для ардуино.
Сборка блока питания с регулировкой тока/напряжения своими руками
Вот очередная версия лабораторного блока питания с напряжением от 0 до 30 В и регулировкой потребляемого тока 0-2 А, что всегда бывает полезно, когда используется БП для настройки самодельных схем или когда они неизвестные приборы запускаются в первый раз.
Схема ИП с регулировкой тока и напряжения
Сама схема питания — это популярный комплект из таких элементов:
- Сам регулируемый стабилизатор, в котором заменен T1 — BC337 на BD139, T2 — BD243 на BD911
- D1-D4 — диоды 1N4001 заменены на RL-207
- C1 — 1000 мкФ / 40 В заменен на 4700 мкФ / 50 В
- D6, D7 — 1N4148 на 1N4001
У используемого трансформатора есть напряжения: 25 В, 2 А и 12 В, которое полезно для управления вентилятором, охлаждающим радиатор и силовые диоды на панели. Для этого была создана небольшая плата с мостовым выпрямителем, фильтрующими конденсаторами и стабилизатором LM7812 (с радиатором).
Внутри корпуса лабораторного источника питания размещены трансформатор, плата самого регулируемого блока питания, платы стабилизаторов — 12 В и 24 В, радиатор с охлаждающим вентилятором (запускается при 50 С).
На передней части корпуса установлены выключатель, три светодиода, информирующих о состоянии блока питания (сеть 220 В, включение вентилятора и защита — ограничение тока или короткое замыкание), синие и красные LED дисплеи с наклеенной на них затемняющей пленкой. Рядом с дисплеями расположены регулирующие потенциометры, а справа выводы питания. На задней части корпуса имеется разъем для сети, предохранитель и охлаждающий вентилятор 60×60 мм.
Что касается индикаторных дисплеев, они показывают:
- синий — текущее напряжение в вольтах V
- красный — текущий ток в амперах A
Источник питания получился реально удобный и надёжный. Вся сборка заняла несколько дней. Что касается охлаждения, оно включается только при высокой нагрузке и то на короткое время, примерно на пару минут.
С этим БП удобно работать даже при слабом освещении, так как яркости индикаторов хватает с головой. Если хотите повысить ток до 3-4 ампера, выбирайте трансформатор по-мощнее и транзисторы регулятора, с хорошим запасам по току. Ещё пару неплохих схем источников питания смотрите по ссылкам:
Voltage Mode/Current Mode. Why a power supply can only regulate only one of these parameters at a time.
Источники питания высокого напряжения и информация о безопасности
Режим регулировки напряжения/Режим регулировки тока. Почему блок питания может одновременно регулировать только один из этих параметров
Большинство высоковольтных источников питания Spellman предлагают режим работы с регулировкой напряжения и тока с автоматическим переключением в зависимости от настроек и условий нагрузки. Для этого источник питания должен иметь два управляющих контура: регулировка напряжения и регулировка тока. Кроме того, каждому контуру требуется управляющий сигнал, предоставляемый пользователем, чтобы источник питания мог регулировать и ограничивать питание соответствующим образом.
Режим регулировки напряжения
Большинство наших заказчиков используют наши источники питания в режиме регулировки напряжения. Когда источник питания работает в режиме регулировки напряжения, он ведет себя как источник напряжения. В этом случае блок питания эффективно регулирует выходное напряжение от 0 до 100 % от номинального выходного напряжения, в зависимости от выбранных настроек.
При этом выходной ток определяется величиной выходного напряжения и сопротивлением нагрузки на выходе источника питания. Большинство пользователей устанавливают ток на максимальное значение. В этом случае при коротком замыкании источник питания автоматически перейдет из режима регулировки напряжения в режим регулировки тока, установив ток на уровне 100 % от максимального номинального тока.
Режим регулировки тока
Намного реже наши заказчики используют источники питания в режиме регулировки тока. Когда источник питания работает в режиме регулировки тока, он ведет себя как источник тока. В этом случае блок питания эффективно регулирует выходной ток от 0 до 100 % от номинального выходного тока, в зависимости от выбранных настроек.
При этом выходное напряжение определяется величиной выходного тока и сопротивлением нагрузки на выходе источника питания. Большинство пользователей устанавливают напряжение на максимальное значение. В этой ситуации, если цепь разомкнута, источник питания автоматически перейдет из режима регулировки тока в режим регулировки напряжения, устанавливая напряжение на уровне 100 % от максимального номинального напряжения.
Программируемость Режима регулировки напряжения/Режима регулировки тока
В вышеуказанных ситуациях уровни напряжения и тока установлены на 100 % от номинальных значений, но их обычно можно регулировать в диапазоне от 0 до 100 % от номинальных значений, в соответствии с требованиями заказчика.
Регулировка только одного параметра
Как указано выше, стандартный высоковольтный источник питания может регулировать только один параметр (будь то напряжение или ток) одновременно. Если вы работаете в режиме регулировки напряжения, то на выходе у вас регулируемое напряжение и соответствующий ток. Если вы работаете в режиме регулировки тока, то на выходе у вас регулируемый ток и соответствующее напряжение. При этом основной момент заключается в том, что источник питания не может регулировать одновременно и напряжение, и ток. При работе в режиме регулировки напряжения (как работают в большинстве случаев) источник питания регулирует выходное напряжение, но ток, потребляемый источником питания, зависит от установленного напряжения и сопротивления нагрузки на выходе источника питания.
Блок регулирования напряжения и тока для простого лабораторного источника питания
Описание
В любой радиолюбительской мастерской не обойтись без источника питания с возможностью изменения величины напряжения в широких пределах. Представленное устройство предназначено для регулирования напряжения от полвольта почти до величины входного напряжения и регулирования величины ограничения тока нагрузки. При наличии готового нерегулируемого источника питания напряжением 20-30 В и допустимым током нагрузки до 5 А, этот блок позволит сделать источник универсальным.
Схема
За основу взята распространённая схема (рис.1), обсуждаемая на некоторых радиолюбительских форумах.
| Рисунок 1. Вырезка из журнала Радио. |
Честно говоря, стабилизированной эту схему назвать нельзя однозначно, но тем не менее я рекомендую её для начинающих радиолюбителей, нуждающихся в регулируемом источнике питания. Схема хороша тем, что позволяет регулировать напряжение в широких пределах, а также ограничивать ток нагрузки, что исключает перегрузку источника питания при коротких замыканиях.
У этой схемы есть один существенный недостаток. При регулировании напряжения, оно изменяется не равномерно. От минимума напряжение нарастает очень медленно, но ближе к максимуму процесс становится настолько стремительным, что точная установка требуемого значения весьма затруднительна. По этому поводу на многих форумах не мало соплей и плевков. Не советую уподобляться истерикам и размазывать сопли по этому поводу, всё, что требуется от настоящего радиолюбителя – включать мозг.
Суть проста. Чтобы получить линейный характер регулирования при нелинейном изменении величины регулирования линейным элементом, нужно скорректировать его характеристику в сторону обратной нелинейности… Вот такая не шуточная шутка получилась 🙂
Предлагаю Вам свой вариант схемы, в котором применена отечественная элементная база и добавлен элемент коррекции нелинейности регулировки напряжения – рисунок 2.
| Рисунок 2. Схема блока регулирования напряжения и ограничения тока нагрузки. |
Обратите внимание на подстроечный резистор R7. Его роль как раз и заключается в коррекции характеристики регулирования.
В качестве регулирующего элемента я применил транзистор КТ819ГМ (просто оказался в наличии). Он выполнен в массивном металлическом корпусе и рассчитан на ток коллектора до 15А. Этот транзистор необходимо размещать на радиаторе для эффективного теплоотвода.
В качестве шунта R2 я использовал параллельную спайку пяти двухваттных резисторов 5,1 Ом по 2 Вт каждый. Этот шунт я так же вынес за пределы платы, расположив рядом с радиатором транзистора.
У меня не оказалось переменного резистора 470 Ом, поэтому мне пришлось для R5 использовать резистор 1 кОм, но и при этом номинале ток регулируется достаточно равномерно.
Настройка схемы
Исходная схема (рисунок 1) практически не нуждается в настройке. Переработанная схема (рисунок 2) требует настройки коррекции характера регулирования напряжения. Настройка очень проста.
Подайте на вход напряжение питания (желательно от того источника, который будете брать за основу). Переменный резистор R6 выведите в крайнее положение, при котором напряжение выхода будет максимальным. Измерьте напряжение на выходе схемы. Переведите движок резистора R6 как Вам кажется точно в среднее положение. Подстроечным резистором R7 добейтесь на выходе схемы ровно половины того напряжения, которое измеряли при установке на максимум. Собственно – всё.
Данная коррекция не гарантирует абсолютную линейность регулировки, но визуально Вам покажется, что напряжение меняется идеально равномерно.
Применение
Плюс этой схемы заключается в ограничении максимального тока. Её можно использовать для сборки относительно бюджетного варианта источника питания. Для примера, я использовал в качестве преобразователя сетевого напряжения электронный трансформатор для галогенных ламп. У них есть серьёзный недостаток – отсутствие защиты от перегрузки. Но поскольку регулирующая схема ограничивает ток нагрузки, то практически защищает схему первичного преобразования от КЗ.
Файлы
Схема достаточно проста для повторения даже начинающими радиолюбителями, но, если кого интересует готовая печатка, качайте файл — Регулируемый БП 24 В 5 А
Кроме схемы и печатки в архиве содержится файл таблица с графиком, визуально отражающий изменение харауеристики равномерности регулирования при введении в схему корректирующего резистора, может кому то будет интересно, или даже полезно. Там в красных ячейках можно задавать величину сопротивлений переменного и корректирующего резистора. Изменение характеристики визуально можно наблюдать по представленным в файле графикам.
Предупреждение
Показанный в данной статье способ коррекции пригоден далеко не во всех случаях и может быть непреемлем для отдельного ряда задач!
ВНИМАНИЕ!!! Показанный способ коррекции следует использовать с особой осторожностью, зная принцип работы настраиваемого устройства и хорошо представляя, что Вы делаете! В других схемах при определённых положениях движка резисторов могут возникать недопустимые токи, способные вывести из строя резисторы или иные детали рабочего устройства!!! Используя описанный способ коррекции в своём устройстве вы действуете на свой страх и риск, а ещё лучше, представляете, что делаете. Ни какой ответственности за возможные причинённые неисправности Ваших устройств при применении корректирующего резистора по моей схеме лично я не несу.
Данный способ коррекции в конкретной представленной схеме на рисунке 2 абсолютно безопасен при любых номиналах корректирующего резистора и любых положениях движков корректирующего и переменного резисторов R7 и R6.
Пользуйтесь и наслаждайтесь творческим процессом 🙂
Блок питания постоянного тока и регулировка напряжения
Данное устройство имеет 2 режима работы + режимы защиты от коротких замыканий, перенапряжения и перегрева
Режимы работы
- выход постоянного напряжения для нагрузок ниже предела тока (регулируемый)
- Выход постоянного тока для нагрузок, достигающих предела тока
Выход постоянного напряжения предназначен для светодиодных лент, которым требуется определенное напряжение и которые принимают ток, который зависит от того, сколько метров вы вставили эту светодиодную ленту на выход.На полосе указано значение Ампер / метр. Ваше устройство предназначено для светодиодных лент на 48 В. Выходное напряжение имеет широкий диапазон около 6,4 В для регулировки выходного напряжения. Это влияет на интенсивность света. Небольшое перенапряжение может быть хорошей идеей для компенсации падения напряжения в очень длинных тонких проводах для поддержания интенсивности, но вы должны знать, что вы делаете.
Если вы добавите больше светодиодов, то, наконец, будет достигнут предел перегрузки по току. Устройство переходит в режим постоянного тока . В этом случае устройство понижает выходное напряжение, чтобы предотвратить перегрузку по току.
Это теоретически позволяет использовать светодиодные ленты с напряжением ниже 48 В. Например, 3 абсолютно равных отрезка полоски на 12 В можно уложить в одну полоску на 36 В. 36 В хорошо подходит для области постоянного тока (= от 50% до 100% отрегулированного выходного напряжения, см. Кривую в таблице данных). Длина полос 12 В должна быть такой большой, чтобы они соответствовали установленному пределу тока на уровне 12 В. Такой дизайн «танцует на канате», потому что его сложно расширить, а все модификации требуют особой осторожности.
Параллельное соединение: Возможно нестабильное — никто не знает, как ток распределяется между блоками. В даташите нет никаких спецификаций. Если один из источников питания запускается быстрее других, он переходит в состояние защиты от сбоев из-за перегрузки. => остальные тоже видят перегрузку. Может происходить постоянное мигание. Требует интенсивного тестирования.
Если вам нужен больший ток, разделите нагрузку на разные источники. У вас по-прежнему может быть общий сетевой кабель и общее напряжение управления напряжением.Бонус: в случае неисправности система может работать частично.
ДОПОЛНЕНИЕ о том, как подключить несколько светодиодных блоков параллельно к одному источнику питания
Как сказано, каждому нужен балансировочный резистор. Без резисторов возможно, что один светодиодный блок потребляет намного больше тока, чем другие. Для формального анализа ситуации давайте подключим 2 светодиода параллельно:
Пусть сначала не добавят балансировочные резисторы; т.е. R1 = R2 = ноль Ом.В этом случае V1 = V2 = Vo; одинаковое напряжение для обоих светодиодных блоков. К сожалению, они никогда не идентичны. Один может потреблять больше тока, чем другой, при одинаковом напряжении. В техническом описании Таблица 2-1 характеристик напечатана, что ток 1,62А может потребовать на 8 вольт больше напряжения для одного светодиода, чем для другого. В списке кривых 4-1 кривая Vf / If показывает, что это большое отклонение может привести к тому, что один светодиодный блок поглотит весь ток, а другой будет без тока. Это крайность. Более разумным является предположение о вероятной разнице между прямым напряжением в 4 В.Даже это имеет огромное значение между токами.
Сделаем еще одно предположение: R1 = R2 и больше нуля. Обозначим общее сопротивление R1 = R2 = Rb (b = балансировочное). По закону Ома мы можем написать точно:
I1 = (Vo-V1) / Rb I2 = (Vo-V2) / Rb. Разделив, мы получим I1 / I2 = (Vo-V1) / (Vo-V2). На первый взгляд это кажется доказательством того, что значение Rb не имеет никакого значения. Это слишком быстро, потому что V1 и V2 все еще зависят от I1 и I2. Давайте немного отступим и получим простую линеаризованную модель прямого напряжения.Напишем:
V1 = RS1 I1 + Vf1 и V2 = RS2 I2 + Vf2, где RS1,2 и Vf1,2 — индивидуальные параметры устройства, которые меняются. Vf1 и Vf2 зависят от материалов полупроводников. Они должны быть совершенно одинаковыми в одном и том же. Rs1 и Rs2 зависят от толщины материала. Это может варьироваться между разными светодиодными блоками даже в одной и той же партии.
Предположим, что все различия прямого напряжения вызваны разными параметрами Rs. Решая наши уравнения с этим предположением, мы получаем коэффициент тока I1 / I2 = (Rb + Rs2 / (Rb + Rs1)
Наше разумное отклонение = 4 В между V1 и V2 при 1,62 А означает, что сопротивление Rs может изменяться на 2,47 Ом.Из кривой для Vf vs If мы получаем линеаризованное базовое значение для Rs = (60V-50V) / (4A-0,5A) = 10V / 3,5A = 2,86 Ом. Если это верно для светодиода 1, то светодиод 2 может иметь Rs2 = 2,86 Ом + 2,47 Ом = 5,33 Ом
Снова вычисляя I1 / I2, получаем I1 / I2 = (Rb + 5,33 Ом) / (Rb + 2,86 Ом). Если Rb = 0, то I1 почти вдвое больше I2. Если Rb становится больше, то отношение приближается к 1.
Попробуем Rb = 3,9Ом. Результат I1 / I2 = 1,37. Это на 37% больше тока и яркости светодиода 1.Рассеивание мощности замечательное. Резистор должен выдерживать и охлаждение нужно продумать. Для светодиода 1, если номинальный ток составлял 1,1 А, рассеиваемая мощность составила бы 8,8 Вт. Больше стандартных сопротивлений:
Если Rb = 4,7 Ом, то I1 / I2 = 1,33 Рассеиваемая мощность в блоке 1 = 10,0 Вт
Если Rb = 5,6 Ом, то I1 / I2 = 1,29 Рассеиваемая мощность в блоке 1 = 11,3 Вт
Если Rb = 6,8 Ом, то I1 / I2 = 1,26 Рассеиваемая мощность в блоке 1 = 13,0 Вт
Нет смысла продолжать, потому что у вас заканчивается резерв напряжения.
Попробуйте эти. Резисторы дешевые. Не недооценивайте Ватт. Вы должны согласиться с тем, что текущая разница все еще может составлять 25 … 33%. Это едва заметно, но не катастрофично.
Если балансировочные резисторы потребляют слишком много энергии , необходимы активные цепи. Хорошо известный метод — иметь токовое зеркало. В вашем случае необходимо тройное зеркало:
Самая левая — это модель, за которой скопированы 3 других. Если вы можете выбрать, установите максимальное напряжение для 1,1А, требующего LU, слева.
В вашем случае правильное RE в 0,5 … 1 Ом. Вы все равно будете рассеивать в общей сложности 6 … 8 Вт в одной группе из 4 блоков, где каждый блок потребляет 1,1 А. Правильный транзистор имеет высокий коэффициент усиления по току 2 А типа — не дарлингтон !!!!! — Эта схема нуждается в надлежащем тестировании — попробуйте обратиться за помощью к местным специалистам. Ему действительно нужны точно подобранные транзисторы и хороший тепловой контакт, который поддерживает одинаковую температуру. Транзисторы имеют коллектор в корпусе, требующем специальной изоляции.
Возможно, кто-то продает подобные схемы.Спрос на них большой и растет по мере роста бизнеса светодиодных светильников. Вот ссылка на более раннюю более продвинутую схему с общим током 700 мА. В него добавлен ограничитель. Это тоже легко приспособить к моему рисунку. У каждой ветви может быть свой ограничитель. Требуется всего 1 резистор и 1 дополнительный транзистор на ответвление. Расчеты и тестирование propoer являются обязательными.
https://web.archive.org/web/20150411084604/http://www.ledsmagazine.com/content/dam/leds/migrated/objects/features/6/2/2/Recom_Fig4.jpg
Ваши идеи защитных схем заслуживают внимания.У вас есть дополнительная причина найти партнера.
Индивидуальные ограничители активного тока для каждой нагрузки. — это один из способов грубой силы. Точно согласованные транзисторы не нужны. Цена выше количества компонентов. Mosfet — хороший компонент, потому что он не требует большой мощности для управления в приложениях постоянного тока. Напряжение затвор-исток контролирует ток. Пример:
Некоторые предложения компонентов для тока 1,1 А и напряжения питания 50 … 57 В:
- R1 = 4,7кОм 0,5Вт
- R2 = 1кОм 0,5Вт
- Rs = 0.6 Ом; два резистора 1,2 Ом 1Вт параллельно
- Q1 = 100 В Vds и более 2 A Тип Id: Старый IRFU 110 хорош, потому что он достаточно громоздкий, чтобы с ним было легко обращаться, и он может рассеивать пару ватт в воздухе с помощью минимального радиатора.
- Q2 = 2N3904
RS нужна возможность замены резистора. Отдельные свойства Q2 немного влияют, если предел 1.1A должен быть точным. Q2 начинает понижать Vgs Q1, если ток достигает 1,1 А. Здесь предполагается, что Q2 имеет крутой трещокд проводимости БЭ при 0.65 вольт. У этого легко есть 10% отклонения.
Держите Vin как можно ниже, чтобы МОП-транзисторы оставались холодными. Было бы идеально, если бы не требовался радиатор Я рекомендую алюминий размером 1 кв. Дюйм и 1 мм. ПРИМЕЧАНИЕ: сток внутренне подключен к корпусу МОП-транзистора.
A4988 Держатель драйвера шагового двигателя
A4983 / A4988 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт является несущей платой или коммутационной платой для микрошагового драйвера Allegro A4988 DMOS с транслятором и защитой от перегрузки по току; Поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ pdf) перед использованием этого продукта.Этот драйвер шагового двигателя позволяет вам управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (дополнительную информацию см. В разделе «Анализ рассеиваемой мощности » ниже). Вот некоторые из основных функций драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных разрешений шага: полный шаг, полушаг, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемый контроль тока позволяет вам установить максимальный выходной ток с помощью потенциометра, что позволяет вам использовать напряжения, превышающие номинальное напряжение вашего шагового двигателя, для достижения более высокой скорости шага
- Интеллектуальное управление измельчением, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перекрестного тока
- Защита от короткого замыкания на массу и короткого замыкания
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, которые установлены, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с включенными, но не припаянными, штыревыми контактами 0,1 ″; у нас также есть версия с уже впаянными штырями заголовка. Для клиентов, заинтересованных в больших объемах при более низких затратах на единицу продукции, мы предлагаем версию в оптовой упаковке без штырей заголовка и версию в оптовой упаковке с установленными штырями заголовка.
Обратите внимание, что у нас есть несколько драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и заменять их во многих приложениях):
- Доступен держатель драйвера шагового двигателя Black Edition A4988 с примерно на 20% большей производительностью; За исключением тепловых характеристик, Black Edition и эта (зеленая) плата взаимозаменяемы.
- Носитель MP6500 может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступен в двух версиях: одна с потенциометром для управления ограничением тока, а другая — с цифровым регулятором ограничения тока для динамической регулировки ограничения тока с помощью микроконтроллера. .
- Носитель DRV8825 предлагает примерно на 50% лучшую производительность в более широком диапазоне напряжений и имеет несколько дополнительных функций.
- Держатель DRV8834 работает с напряжением питания двигателя всего 2.5 В, что делает его пригодным для низковольтных приложений.
- Носитель DRV8880 предлагает динамически масштабируемое ограничение тока и «Автонастройку», которая автоматически выбирает режим затухания в каждом цикле ШИМ для оптимального регулирования тока на основе таких факторов, как сопротивление обмотки и индуктивность двигателя, а также его динамическая скорость и нагрузка.
Мы также продаем увеличенную версию несущей A4988, которая имеет защиту от обратной мощности на основном входе и встроенные 5 В и 3.Стабилизаторы напряжения 3 В, которые устраняют необходимость в отдельных источниках питания логики и двигателя.
Некоторые униполярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации ознакомьтесь с часто задаваемыми вопросами. С этим драйвером нельзя использовать униполярные двигатели с пятью выводами.
Комплектующие в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним разъединяемым штекером 1 × 16 контактов 0,1 «. Эти разъемы можно припаять для использования с беспаечными макетными платами или 0.Гнездовые разъемы 1 дюйм. Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами).
Использование драйвера
Минимальная электрическая схема для подключения микроконтроллера к держателю драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйвер требует, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) должно быть подключено к контактам VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой, и они должны быть способны выдавать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к деструктивным скачкам напряжения LC, особенно при использовании кабелей питания длиной более нескольких дюймов.При правильных условиях эти выбросы могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже когда напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких скачков — установить большой (не менее 47 мкФ) электролитический конденсатор между мощностью двигателя (VMOT) и заземлением где-то рядом с платой.
Соединения двигателя
Четырех-, шести- и восьмипроводные шаговые двигатели могут приводиться в действие A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может привести к его повреждению. (В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигателиобычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полному шагу. Микрошаговый драйвер, такой как A4988, обеспечивает более высокое разрешение за счет промежуточных положений ступеней, которые достигаются за счет подачи питания на катушки с промежуточными уровнями тока.Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот за счет использования четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбирать из пяти разрешений шага в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние понижающие резисторы 100 кОм, а MS2 имеет внутренний понижающий резистор 50 кОм, поэтому оставление этих трех выводов выбора микрошага отключенными приводит к переходу в полношаговый режим.Для правильной работы микрошаговых режимов необходимо установить достаточно низкий предел тока (см. Ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут поддерживаться должным образом, и двигатель будет пропускать микрошаги.
| MS1 | MS2 | MS3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокая | Низкий | Низкий | Полушаг |
| Низкий | Высокая | Низкий | Четверть шага |
| Высокая | Высокая | Низкий | Восьмая ступень |
| Высокая | Высокая | Высокая | Шестнадцатый шаг |
Управляющие входы
Каждый импульс на входе STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR.Обратите внимание, что контакты STEP и DIR не подтягиваются к какому-либо определенному напряжению внутри, поэтому вы не должны оставлять ни один из этих контактов плавающим в вашем приложении. Если вам просто нужно вращение в одном направлении, вы можете связать DIR напрямую с VCC или GND. Микросхема имеет три разных входа для управления многочисленными состояниями питания: RST, SLP и EN. Подробные сведения об этих состояниях питания см. В таблице данных. Обратите внимание, что штифт RST плавающий; Если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы поднять его и включить плату.
Ограничение тока
Одним из способов повышения производительности шагового двигателя является использование максимально возможного напряжения для вашего приложения. В частности, увеличение напряжения, как правило, обеспечивает более высокую частоту шагов и крутящий момент, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако для безопасного использования напряжений, превышающих номинальное напряжение шагового двигателя, необходимо активно ограничивать ток катушки, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое ограничение активного тока, а подстроечный потенциометр на плате может использоваться для установки ограничения тока. Один из способов установить ограничение тока — это перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, одновременно регулируя потенциометр ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. Е. Без синхронизации входа STEP). Обратите внимание на , что ток, который вы измеряете, составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки смогут превышать этот измеренный ток полной ступени на 40% (1/0.7) на определенных ступенях; Пожалуйста, примите это во внимание при использовании этого метода для установки текущего лимита. Кроме того, обратите внимание, что вам необходимо будет выполнить эту настройку еще раз, если вы когда-либо изменить логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает предел тока является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящее место для установки измерителя тока — это последовательно с одной из катушек шагового двигателя.
Другой способ установить ограничение тока, чтобы вычислить опорное напряжение, которое соответствует нужному текущему пределу, а затем настроить ограничения тока потенциометра, пока вы не измерить, что напряжение на VREF штифта. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком на нижней шелкографии печатной платы. Предел тока, я MAX, относится к опорному напряжению следующим образом:
« I_ (МАКС) = (V_ (REF)) / (8 * R_ (CS)) `
или, преобразованный для решения для VREF:
« V_ (REF) = 8 * I_ (MAX) * R_ (CS) `
R CS — текущее сопротивление; оригинальные версии этой платы использовали 0.050 Ом резисторов считывания тока, но мы перешли на использование резисторов считывания тока 0,068 Ом в январе 2017 года, что делает более полезными диапазон регулировочного потенциометра. На следующем рисунке показано, как определить, какие резисторы измерения тока установлены на вашей плате:
Идентификация исходных сенсорных резисторов 50 мОм (слева) и сенсорных резисторов 68 мОм (справа), представленных в январе 2017 года. |
|---|
Итак, например, если вы хотите установить предел тока на 1 А и у вас есть плата с резисторами считывания 68 мОм, вы должны установить VREF на 540 мВ.2) = I_ (MAX) = 1 текст (A) «
Если вместо этого вы хотите, чтобы ток через каждой катушки составлял 1 А в полношаговом режиме, вам необходимо установить предел тока на 40% выше, или 1,4 А, так как катушки ограничены примерно 70% от установленный предел тока в полношаговом режиме (уравнение выше показывает, почему это так). Чтобы сделать это с платой с резисторами считывания 68 мОм, вы должны установить VREF на 770 мВ.
Рекомендации по рассеиванию мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете передать, зависит от того, насколько хорошо вы можете поддерживать ИС в холодном состоянии.Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более примерно 1 А на катушку требуется теплоотвод или другой метод охлаждения.
Этот продукт может нагреться до , чтобы обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Обратите внимание, что измерение тока, потребляемого источником питания, обычно не дает точного измерения тока катушки.Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что требуется двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приведет к значительным различиям между средним и среднеквадратичным токами.
Принципиальная схема
Принципиальная схема держателя драйвера шагового двигателя A4988 (как для зеленого, так и для черного цветов). |
|---|
Примечание: Эта плата представляет собой заменяющую замену нашему оригинальному (и теперь снятому с производства) держателю драйвера шагового двигателя A4983. Более новый A4988 предлагает защиту от перегрузки по току и имеет внутреннее напряжение 100 кОм на выводе выбора микрошага MS1, но в остальном он практически идентичен A4983.
Корректировка таблиц статуса подачи из Visa Bulletin
Если USCIS определит, что на финансовый год доступно больше иммиграционных виз, чем количество известных претендентов на такие визы, мы укажем на этой странице, что вы можете использовать Даты для подачи диаграмма.В противном случае мы укажем на этой странице, что вы должны использовать таблицу Даты окончательных действий , чтобы определить, когда вы можете подать заявку на корректировку статуса. Однако, если конкретная категория иммиграционной визы является «текущей» в таблице сроков окончательных действий или крайний срок в таблице сроков окончательных действий более поздний, чем дата в таблице сроков подачи, заявители в этой категории иммиграционной визы могут подавать, используя График сроков окончательных действий в этом месяце.
Мы планируем назначать одну из двух диаграмм каждый месяц и делать ссылки на соответствующую диаграмму ниже в течение одной недели после публикации DOS бюллетеня Visa Bulletin.
Корректировка графиков представления статуса за текущий месяц
Для заявок от семьи:
В категории F2A есть крайняя дата на диаграмме «Даты подачи». Однако в таблице сроков окончательных действий эта категория является «текущей». Это означает, что заявители категории F2A могут подавать заявки, используя таблицу окончательных дат действий в Визовом бюллетене Государственного департамента за апрель 2021 года.
Для всех других категорий предпочтений, спонсируемых семьей, вы должны использовать таблицу «Даты подачи» в Визовом бюллетене Государственного департамента на апрель 2021 года.
Для подачи заявок на получение предпочтений на основе занятости:
Для всех категорий предпочтений на основе занятости вы должны использовать таблицу окончательных сроков действия в Визовом бюллетене Государственного департамента на апрель 2021 года.
Корректировка таблиц статуса в следующем месяце
Для заявок от семьи:
В категории F2A есть крайняя дата на диаграмме «Даты подачи». Однако в таблице сроков окончательных действий эта категория является «текущей».Это означает, что заявители категории F2A могут подавать заявки, используя таблицу окончательных дат действий в Визовом бюллетене Государственного департамента за май 2021 года.
Для всех других категорий предпочтений, спонсируемых семьей, вы должны использовать таблицу дат подачи в Визовом бюллетене Государственного департамента за май 2021 года.
Для подачи заявок на получение предпочтений на основе занятости:
Для всех категорий предпочтений на основе занятости вы должны использовать таблицу окончательных сроков действия в Визовом бюллетене Государственного департамента за май 2021 года.
Предыдущая корректировка таблиц статуса
наших лучших хитов | Корректировка амортизации ACE — справиться с «упрощением» (скорректированная текущая прибыль)
«Наши лучшие хиты» — это попытка показать нашим читателям самые популярные — и все еще жадно читаемые — статьи из наших архивов. Эта статья впервые появилась в нашем выпуске за июнь 1991 года.
Краткое содержание — Корректировка скорректированной текущей прибыли (ACE) могла быть упрощена Законом о согласовании доходов 1989 года (RRA 89), но процесс корректировки все еще сложен.Закон о налоговой реформе 1986 года требовал корректировки на основе ACE, чтобы заменить корректировку корпоративной бухгалтерской книги за налоговые годы, начинающиеся после 1989 года. Регулирование означало, что альтернативный минимальный налогооблагаемый доход корпораций (AMTI) обычно увеличивался на 75% от суммы, на которую ACE был больше, чем AMTI. RRA 89 было предназначено для изменения альтернативного минимального налога для корпораций путем упрощения способа расчета амортизации ACE. Сложность расчета демонстрируется на нескольких примерах.
При расчете альтернативного минимального налогооблагаемого дохода (AMTI) за налоговые годы, начинающиеся после 1986 г. и до 1990 г., половина суммы, на которую балансовый доход корпорации до налогообложения превышал AMTI, определяемую без учета «корректировки балансового дохода» и любые NOL были добавлены к вычисляемому в противном случае AMTI. TRA 86 предусматривал, что для налоговых лет, начинающихся после 1989 года, корректировка корпоративного балансового дохода будет заменена корректировкой, основанной на скорректированной текущей прибыли (ACE). Следовательно, большинство корпоративных налогоплательщиков должны рассчитывать ACE для налоговых лет, начинающихся после 1989 года.Как правило, AMTI увеличивается на 75% от суммы, на которую ACE превышает AMTI, определяемую без учета корректировки ACE и любых NOL.
Закон о согласовании доходов 1989 года (RRA 89) впоследствии внес ряд существенных изменений в корпоративную AMT. Одной из целей модификаций RRA 89 было «упрощение вычислений ACE». В этой статье рассматриваются изменения в вычислении амортизации ACE и приводятся примеры необходимых вычислений. В нем также рассматриваются части предлагаемых правил в соответствии с разд.56, выпущенный в мае 1990 года. Расчеты, представленные в этой статье, показывают, что корректировка амортизации ACE может быть больше, чем ожидали многие налогоплательщики. Действительно, величина корректировки для пятилетней собственности ACRS в последний год ее регулярной налоговой амортизации может быть ошеломляющей (см. Пример 3). Корректировки амортизации ACE могут привести к возникновению непредвиденных обязательств AMT, и корпоративным налогоплательщикам рекомендуется пересмотреть свои расчетные налоговые платежи, чтобы избежать значительных процентов и штрафов за недоплату.
Хотя одной из целей RRA 89 было упрощение расчета ACE, корректировка амортизации ACE после RRA 89, тем не менее, является сложной. Например:
- Для большинства корпоративных налогоплательщиков амортизируемое имущество необходимо разделить на пять групп для целей расчета ACE.
- Фактически MACRS не влияет на вычисление ACE. Но на расчет существенно влияет ACRS realty.
- Для амортизируемого имущества, отличного от недвижимости, один расчет требуется для свойства ACRS, но другой и, возможно, два, требуются для свойства MACRS.
- Вся корпоративная собственность MACRS имеет четыре основы при расчете корпоративных налоговых обязательств.
- Большая часть корпоративной собственности ACRS имеет три основы при расчете корпоративных налоговых обязательств.
Сложность, остающаяся после RRA 89, проиллюстрирована серией примеров с использованием относительно простых фактов.
Определение возраста и расчетыРазд. 56 (g) (1) и (2) предусматривают корректировку ACE при расчете AMTI в налоговые годы, начинающиеся после 1989 года.1 Проп. Рег. П. 1.56 (g) — (1) (a) (5) (i) содержит следующее определение:
«AMTI до корректировки — это AMTI налогоплательщика за налоговый год, определенный в соответствии с п. 55 (b) (2), но без корректировки для ACE и без вычета альтернативного налогового NOL в соответствии с разд. 56 (а) (4) ».
Проп. Рег. П. 1.56 (g) — (1) (a) (5) (ii) затем определяет ACE как предварительную регулировку AMTI, «скорректированную, как предусмотрено в этом разделе и в разделе 56 (g)». П. 56 (g) (4) (A) предусматривает пять корректировок на амортизацию при определении ACE.Обратите внимание, что корректировка для целей амортизации AMT — это не то же самое, что корректировка амортизации ACE. Таким образом, корпоративные налогоплательщики должны рассчитать корректировку амортизации для целей AMT и, в большинстве случаев, вторую корректировку амортизации для целей ACE.
Чтобы справиться со сложностью, вызванной «упрощением», требуется работоспособное решение. Три временные линии на рисунке 1 суммируют периоды применения правил для: 1) свойства MACRS; 2) собственность ACRS; и 3) имущество, амортизируемое вне ACRS или MACRS.Эти временные рамки направляют читателя к описанию соответствующих групп свойств и примерам, которые следуют ниже.
Группа недвижимости I
Группа недвижимости I состоит из всех объектов недвижимости, подпадающих под действие ACRS и MACRS, введенных в эксплуатацию в налоговом году, начинающемся после 1989 г. 2 Согласно правилам перехода ACRS, недвижимость с определенным классом сроком службы не менее 20 лет и недвижимое имущество, отвечающее установленным критериям, введенное в эксплуатацию после 1986 г. и до 1991 г., по-прежнему может считаться собственностью ACRS.3
Амортизационный вычет по ACE для группы собственности I рассчитывается в соответствии с Альтернативной системой амортизации (ADS), описанной в разд. 168 (г). Амортизация ADS рассчитывается с использованием линейного метода (SL) и без ликвидационной стоимости. Период восстановления ADS для большей части собственности подробно описан в Rev. Proc. 87-56. 4 Применимое соглашение для нежилой недвижимости и жилой недвижимости в аренду — это соглашение на середину месяца. Для всей остальной собственности используется требуемый период полугодия или середины квартала.
Пример 1. ECA, Inc., корпорация C календарного года, в апреле ввела в эксплуатацию недвижимость на 5 лет (срок действия класса 7 лет) на 800 000 долларов США и коммерческое здание на сумму 1 млн долларов США (актив на 31,5 года). 10, 1990. Это были единственные активы, введенные в эксплуатацию в 1990 году. В 1990 году регулярный налогооблагаемый доход ЕЦА составил 210 000 долларов после вычета регулярной налоговой амортизации на вышеуказанную недвижимость. У ECA есть регулярные налоговые обязательства в размере 65 150 долларов США и никаких корректировок AMTI, преференций AMTI или корректировок ACE, кроме тех, которые связаны с двумя активами, введенными в эксплуатацию в 1990 году.Для расчета AMTI и ACE ECA за 1990 г. необходимы три расчета амортизации с использованием данных, показанных на рисунке 2.
Предварительные корректировки AMTI и ACE для ECA за 1990 год рассчитываются (показаны на рисунке 3), чтобы получить AMTI ECA за 1990 г. Предварительный AMT ECA для 1990 год — 62 104 доллара (AMTI 310 520 долларов x 0,2). 5 ЭКА не будет иметь никаких корпоративных AMT за 1990 г .; 62 104 доллара США меньше регулярных налоговых обязательств ЭКА в размере 65 150 долларов США. Однако, если у ECA есть другие корректировки AMT или ACE, оно может легко понести корпоративные обязательства AMT в течение года.
Группа недвижимости II
Группа собственности II состоит из объектов недвижимости, подпадающих под действие MACRS, которые были введены в эксплуатацию в налоговом году, начинающемся до 1990 года. Недвижимость, исключенная из MACRS в соответствии с пунктами (1), (2), (3) , или (4) гл. 168 (f) также исключены из этой группы (см. Группу свойств V). Также из группы II исключены свойства, исключенные из MACRS на основании разд. 168 (f) (5) (i), относящиеся к определенным операциям перетока.
Амортизация по ACE для собственности группы II основана на следующей формуле:
Амортизация по группе объектов II ACE = скорректированная база имущества для целей AMT на конец последнего налогового года, начинающегося до 1990 г. / оставшийся период восстановления, применимый к Недвижимость под ADS гл.168 (g)
При вычислении числителя этой формулы скорректированный базис — это базис, определенный для целей AMT. Поскольку амортизация в размере 150 DB или SL (для недвижимости) используется для целей AMT, база AMT обычно будет больше, чем база для недвижимости, скорректированная по обычному подоходному налогу. Кроме того, после определения числитель остается неизменным на протяжении всего оставшегося периода восстановления ADS.
Пример 2. Продолжая факты из Примера 1, предположим, что ECA ввела в эксплуатацию два дополнительных объекта недвижимости, подлежащих амортизации, в 1988 году.Для простоты иллюстрации предположим, что при расчете налогооблагаемого дохода 210 000 долларов США была вычтена правильная регулярная налоговая амортизация этой собственности (т.е. активов, введенных в эксплуатацию в 1988 году) за 1990 год. Дополнительные свойства: 1) собственность MACRS за 500 000 долларов США на 7 лет (со сроком службы 10 лет), введенная в эксплуатацию 20 января 1988 года; и 2) недвижимое имущество MACRS на сумму 1,200,000 долларов США на 31,5 года, введенное в эксплуатацию 3 марта 1988 года. Регулярный подоходный налог и амортизационные отчисления AMT за 1988-1990 годы показаны на Рисунке 4.
Скорректированные базы двух объектов собственности для целей AMT в начале 1990 налогового года показаны на Рисунке 5.
Для 7-летнего имущества на Рисунке 4 период восстановления для целей корректировки ACE составляет 10 лет. ADS жизнь. Оставшийся период восстановления ADS на 1 января 1990 года составляет 8,5 лет – 10 лет с условием вычитания полугодия для 1988 года и полного года за вычетом 1989 года. Таким образом, амортизация по ACE за 1990 год для 7-летнего имущества определяется следующим образом:
Амортизация по ACE = 393 100 долларов США (на основе AMT) / 8.5 (лет в соответствии с указанным выше) = 46 247 долларов США
Для 31,5-летней собственности на Рисунке 4 периодом восстановления для целей корректировки ACE является 40-летний срок службы ADS. Оставшийся период восстановления ADS на 1 января 1990 г. составляет 458,5 месяцев; 480 месяцев минус 9,5 месяцев амортизации в 1988 г. и полных 12 месяцев в 1989 г. Таким образом, амортизация по ACE в 1990 г. для 31,5-летнего имущества определяется следующим образом:
АмортизацияACE = 1 146 252 долл. США (на основе AMT) / 458,5 (месяцев согласно выше ) x 12 = 30 000 долларов США
Предварительные корректировки AMTI и ACE ECA за 1990 год рассчитываются, как показано на рисунке 6, для получения AMTI ECA за 1990 год.
Ориентировочная AMT ЭКА на 1990 год составляет 71 329 долларов (356 647 долларов x 0,2). Таким образом, он несет корпоративное обязательство AMT за 1990 год в размере 6 179 долларов (разница между обязательством AMT в размере 71 329 долларов и обязательством по обычному корпоративному налогу на 65 150 долларов).
Группа собственности III
Группа собственности III состоит из имущества ACRS, введенного в эксплуатацию в налоговом году, начинающемся до 1990 года, и имущества, введенного в эксплуатацию после 1980 года и до 1987 года, которые исключены из ACRS.Чтобы исключить переходные свойства ACRS (обсуждаемые в группе собственности I), введенные в эксплуатацию в налоговом году, начинающемся после 1989 года, из группы собственности III, RRA 89 изменено до RRA 89 Sec. 56 (g) (4) (A) (iii). 7
Амортизация по ACE для собственности группы III основана на следующей формуле:
Амортизация по ACE группы собственности III = скорректированная база имущества для обычных налоговых целей на конец последнего налогового года, начинающегося до 1990 г. / оставшийся период восстановления, применимый к Собственность под ADS гл.168 (g)
При вычислении числителей этой формулы скорректированная база определяется для обычных налоговых целей. Это значительно отличается от числителя, используемого для группы свойств II.
При вычислении знаменателя проп. П. 1.56 (g) -1 (b) (4) (ii) требует, чтобы налогоплательщики применяли срок службы ADS к объектам, находящимся в сфере обслуживания, в период до принятия ADS, который был введен вместе с MACRS в 1986 году. «Под гл. 168 (g) (2) »без точки отсчета (даты) также может вызвать путаницу из-за того, что несколько поправок к исходному п.168 (g) (2) периоды восстановления были установлены в соответствии с Законом 89 Раздела Закона о регулировании доходов (RRA). 1002 (i) (2) (F), 6027 (b) (2) и 6029 (c).
Пример 3. Продолжая факты из Примера 2, предположим, что ECA ввела в эксплуатацию два дополнительных амортизируемых объекта недвижимости в 1986 году. Предположим, что обычная налоговая амортизация этих объектов недвижимости (т.е. активов, введенных в эксплуатацию в 1986 году) за 1990 была вычтена при получении налогооблагаемого дохода в размере 210 000 долларов США. Дополнительные объекты недвижимости, введенные в эксплуатацию в 1986 году, включают: 1) 600 000 долларов США по классу активов 22.3 единицы оборудования (5 лет в собственности ACRS, срок эксплуатации 9 лет) введены в эксплуатацию 30 ноября 1986 г .; и 2) 1 миллион долларов США на 19-летнюю недвижимость ACRS, введенную в эксплуатацию 10 января 1986 года. Вычеты из регулярной амортизации по налогу на прибыль (а также амортизации SL для недвижимости) за 1986-1990 годы показаны на Рисунке 7.
Скорректированная база двух объектов недвижимости, введенных в эксплуатацию в 1986 году для целей обычного налога на прибыль в начале 1990 налогового года, показана на Рисунке 8.
Для 5-летнего имущества на Рисунке 7 период восстановления для ACE целями корректировки является 9-летний срок службы ADS.Оставшийся период восстановления ADS на 1 января 1990 г. составляет 5,5 лет (9 лет минус полугодие для 1986 г. и полный год для 1987, 1988 и 1989 гг.). Таким образом, амортизация ACE 1990 года для 5-летней собственности определяется следующим образом:
Амортизация ACE = 126 000 долларов США (обычная налоговая база) / 5,5 (лет согласно приведенному выше) = 22 909 долларов США
Для 19-летней недвижимости на Рисунке 7, период восстановления для целей корректировки ACE составляет 40 лет жизни ADS. Оставшийся период восстановления ADS на 1 января 1990 г. составляет 432 человека.5 месяцев (480 месяцев минус 11,5 месяцев амортизации в 1986 году и полные 12 месяцев в 1987, 1988 и 1989 годах). Таким образом, амортизация ACE 1990 года для 19-летнего имущества определяется следующим образом:
Амортизация ACE = 683000 долларов США (обычная налоговая база) / 432,5 (месяцы, как указано выше) x 12 месяцев = 18 950 долларов США
Предварительная корректировка AMTI и ACE ECA 1990 года. рассчитываются, как показано на Рисунке 9, чтобы получить AMTI ECA за 1990 год. Ориентировочная AMT ECA на 1990 год в Примере 3 составляет 93 901 доллар (469 503 доллара x 0,2). Таким образом, он несет корпоративное обязательство AMT в размере 28 751 доллар (93 901 доллар — 65 150 долларов, обычное обязательство по корпоративному налогу) за 1990 год.
Группа имущества IV
Группа имущества IV состоит из всего амортизируемого и амортизируемого имущества, введенного в эксплуатацию до 1981 года. Таким образом, она включает в себя амортизируемое и амортизируемое имущество, не подпадающее под действие ACRS или MACRS из-за времени, в которое оно было помещено. услуга. Реквизит Рег. П. 1.56 (g) — 1 (b) (5) (i) проясняет, что свойства исключены как из ACRS, так и из MACRS по причине pre-TRA 86 Sec. 168 (e) (4) и после TRA 86 Sec. 168 (f) (5) (A) (i), положения о предотвращении вспенивания, также включены в группу собственности IV.Для этой группы имущества сумма, допустимая в качестве износа или амортизации для целей расчета ACE, «… определяется таким же образом, как используется при расчете налогооблагаемого дохода». 8 Таким образом, для имущества Группы IV корректировка на амортизацию ACE отсутствует.
Скорректированная основа ACE
Корректировка амортизации ACE создает очень значительные дополнительные сложности. TAMRA 88 добавил разд. 56 (г) (4) (I). Это положение гласит: «(I) НАСТРОЕННАЯ ОСНОВА.Скорректированная основа для любого имущества, в отношении которого применяется корректировка в соответствии с настоящим параграфом, должна определяться путем применения режима, предписанного в этом параграфе ».
Пример 4. Что касается собственности после 1989 года, описанной в Примере 1, свойства будут иметь три основы для целей расчета корпоративных налоговых обязательств ECA, как показано на Рисунке 10.
Если собственность на 31,5 лет в Рисунок 10 был продан, прежде чем разрешить дальнейшую амортизацию, по первоначальной стоимости в 1 миллион долларов, прибыль в размере 22 490 долларов (1 000 000 долларов — 977 510 долларов) будет включена в регулярный налогооблагаемый доход.9 Однако при расчете AMTI до корректировки включаемая прибыль составит 17 710 долларов (1 000 000 долларов — 982 290 долларов). Таким образом, для расчета AMTI до корректировки потребуется корректировка в сторону понижения на 4780 долларов (17 710 долларов — 22 490 долларов). Для целей ACE основа для 31,5-летней собственности такая же, как и для предварительной корректировки AMTI. Следовательно, при расчете ACE корректировка величины усиления производиться не будет.
Если пятилетняя собственность была продана (опять же без учета дополнительной амортизации) по ее первоначальной стоимости в 800 000 долларов, прибыль в размере 160 000 долларов (800 000 — 640 000 долларов) будет включена в регулярный налогооблагаемый доход.При расчете AMTI до корректировки включаемая прибыль составит 85 680 долларов (800 000 — 714 320 долларов). Для расчета AMTI до корректировки потребуется корректировка в сторону понижения на 74 320 долларов (85 680 долларов — 160 000 долларов). Для целей ACE базовая стоимость собственности составляет 742 880 долларов. Таким образом, при расчете ACE включаемая прибыль составит 57 120 долларов (800 000 — 742 880 долларов). Для расчета ACE требуется корректировка в сторону понижения на 28 560 долларов (57 120 — 85 680 долларов). Таким образом, требуются две основные настройки: одна для правильного вычисления AMTI, а вторая — для правильного вычисления ACE.
За исключением любых других корректировок AMT, предпочтений и т. Д., ACE ECA за год продажи будет рассчитываться следующим образом на основе вышеизложенных фактов.
Обычный корпоративный налогооблагаемый доход, включая 182 490 долларов (22 490 долларов + 160 000 долларов) регулярной налоговой прибыли от вышеуказанных продаж;
Вычет: корректировка прироста AMTI до корректировки в размере 79 100 долларов (4780 долларов + 74 320 долларов)
Равно: Предварительная корректировка AMTI 10
Вычет: корректировка прироста ACE в размере 28 560 долларов (0 + 28 560 долларов) 11
Равно: ACE 12
Свойство MACRS добавлено в примере 2 (т.е., свойство, введенное в эксплуатацию в 1988 г.) потребует вычислений, аналогичных расчетам в Примере 4. Однако для свойства ACRS требуемые вычисления существенно отличаются; для имущества ACRS обычная налоговая база и база AMT одинаковы.
Пример 5. Что касается свойств ACRS, описанных в Примере 3, объекты, введенные в эксплуатацию в 1986 году, будут иметь две основы для целей расчета своих корпоративных налоговых обязательств, как показано на Рисунке 11.
Если 19-летняя недвижимость на Рисунке 11 была продана до того, как была разрешена дальнейшая амортизация 13 по первоначальной стоимости в 1 миллион долларов, прибыль в размере 380 000 долларов (1 000 000 долларов — 620 000 долларов) будет включена в регулярный налогооблагаемый доход. В целях расчета AMTI до корректировки корректировка на прибыль от продажи имущества ACRS не производится, поскольку основа одинакова как для обычного налога, так и для целей AMT. Однако для целей ACE основа для 19-летней собственности составляет 664 050 долларов. Таким образом, при расчете ACE включаемая прибыль составит 335 950 долларов (1 000 000 долларов — 664 050 долларов).Для расчета ACE требуется корректировка в сторону понижения на 44 050 долларов (335 950 — 380 000 долларов).
Если пятилетняя недвижимость на Рисунке 11 была продана за 200 000 долларов, прибыль в 200 000 долларов (200 000 долларов — 0 долларов) будет включена в регулярный налогооблагаемый доход. 14 Опять же, при вычислении AMTI предварительной настройки для свойства ACRS корректировка не производится. Однако для целей ACE стоимость имущества составляет 103 091 доллар. Таким образом, при расчете ACE включаемая прибыль составит 96 909 долларов (200 000 — 103 091 доллар). Для расчета ACE требуется корректировка в сторону понижения на 103 091 доллар (96 909 долларов — 200 000 долларов).
Заключительные наблюдения
Для налоговых лет, начинающихся после 1989 г., требуется корректировка ACE для расчета AMTI для большинства корпоративных налогоплательщиков. В этой статье три временные шкалы и пять групп свойств были использованы для обобщения необходимых корректировок амортизации при вычислении ACE.
Приведены несколько наблюдений:
- Для недвижимости, подпадающей под действие MACRS, корректировка на амортизацию для целей ACE равна нулю. Это происходит из-за того, что как корректировка амортизации AMTI, так и расчет амортизации ACE используют 40-летний срок службы и метод SL (см. Пример 1).
- Корректировка амортизации ACE для недвижимости, подпадающей под действие ACRS, может быть значительной, поскольку амортизация 175 DB за 15, 18 или 19 лет может использоваться для обычных налоговых целей, но 40-летняя SL требуется для целей ACE (см. Пример 3). Кроме того, эта разница в сумме амортизации может привести к существенным различиям между базой, скорректированной по обычным налогам на недвижимость, и базой, скорректированной по ACE (см. Пример 5).
- Для имущества ACRS, кроме недвижимости, которое не полностью амортизировано до налогового года, начинающегося после 1989 г., обязательное использование ADS для целей ACE также приведет к существенным различиям между обычным налогом и амортизацией ACE (см. Пример 3), а также приводит к существенным различиям между обычным налогом и скорректированной базой ACE (см. Пример 5).
Появление ACE требует от большинства корпоративных налогоплательщиков расчета амортизации по крайней мере четырьмя способами для целей налогообложения. Амортизация должна рассчитываться для: 1) обычных налоговых целей; 2) Цели настройки AMTI; 3) Цели настройки ACE; и 4) для целей разведки и добычи. Кроме того, каждый из этих расчетов приводит к разной основе для целей налогообложения прибыли.
ENDNOTES
1 Если не указано иное, все ссылки на «Раздел» или «Раздел» см. Налоговый кодекс 1986 года с поправками, внесенными до декабря 1990 года.
2 См. Разд. 56 (g) (4) (A) (i) перед RRA 89 за предыдущую формулировку.
3 См. TRA 86 Sec. 203 (a) (1) (A) для описания этого свойства.
4 1987-2 C.B.674.
5 Корпорации с AMTI, превышающим 310 000 долларов США, не имеют права на освобождение от уплаты AMT в размере 40 000 долларов США.
6 Проп. П. 1.56 (г) -1 (б) (2) (i).
7 См. Предварительный RRA 89 Sec. 56 (g) (4) (A) (iii) за предыдущую формулировку.
8 Проп. Рег. П. 1.56 (г) -1 (б) (5).
9 Эта спецификация сделана для упрощения расчетов.Согласно соглашениям MACRS, дополнительная амортизация должна быть рассчитана, даже если недвижимость была продана 1 января 1991 года.
10 Этот упрощенный расчет исключает все другие предпочтения и корректировки, необходимые для расчета AMTI до корректировки. Включена только предварительная регулировка усиления AMTI.
11 Под разд. 56 (g) (2), отрицательная корректировка ограничивается совокупными положительными корректировками, внесенными в AMTI до корректировки в текущем и предыдущих годах, за вычетом любой предыдущей отрицательной корректировки.
12 Это упрощенное вычисление исключает все другие настройки, необходимые для вычисления ACE. Включена только регулировка усиления ACE.
13 Эта спецификация сделана для упрощения расчетов. Согласно соглашениям ACRS для недвижимости, дополнительная амортизация должна быть рассчитана, даже если недвижимость была продана 1 января 1991 года.
14 Это имущество полностью амортизировано для целей обычного налогообложения в конце 1990 года.
Брайан Л. Лаверти, Доктор философии, CPA, доцент кафедры бухгалтерского учета и налогообложения Университета Толедо.Доктор Лаверти занимался общественной практикой в компании Danielson, Shultz & Co., P.C. в Лансинге, штат Мичиган. Он был лидером дискуссий в различных домашних программах для бухгалтерских фирм, Канзасского общества бухгалтеров, NYSSCPA, AICPA, а также в нескольких программах налогового обучения MACPA.
Деннис Дж. Гаффни, доктор философии, бухгалтер, профессор бухгалтерского учета и заведующий кафедрой бухгалтерского учета Университета Толедо. Профессор Гаффни занимался общественной практикой в компаниях Haskins & Sells и Ernst & Ernst.Он является соавтором нескольких учебников по федеральному налогообложению и является автором многочисленных периодических налоговых изданий.
Духовность и текущая адаптация взрослых, переживших сексуальное насилие в детстве, на JSTOR
AbstractМы исследуем роль духовности в современной адаптации взрослых, переживших сексуальное насилие в детстве (CSA). Выборка из 101 мужчины и женщины, переживших CSA, заполнила анкеты о духовности (отношения с Богом или высшей силой), личностных факторах (приписывание вины, самопринятие, надежда) и текущей адаптации (настроение, личностный рост, разрешение насилия) .Результаты показали, что отношения с доброжелательным Богом или высшей силой связаны с переживанием меньшего негативного настроения и большего чувства личного роста и разрешения насилия. Кроме того, отношения с высшей силой связаны с другими личностными факторами, такими как принятие себя и надежда. Отношения с доброжелательным Богом, по-видимому, имеют косвенную связь с депрессивным настроением и разрешением насилия через посреднические пути надежды и принятия себя. Напротив, отношения с Богом, кажется, имеют более прямую связь с результатами личного роста этих выживших.
Информация о журналеЖурнал научного изучения религии (JSSR), ежеквартальное издание Общества научного изучения религии, публикует исследования религиозных явлений на протяжении более сорока лет. Опираясь на широкий междисциплинарный профиль науки, включая религию, социологию, политологию, психологию, антропологию и историю, журнал предлагает научный анализ роли религии в обществе. Примеры затронутых тем включают модели членства в церкви и рост, взаимосвязь между религией и здоровьем, взаимосвязь между религией и социальными установками, рост фундаментализма, секуляризацию и сакрализацию, а также новые религиозные движения.JSSR — важное издание для тех, кто хочет быть в курсе научных исследований о роли и влиянии религии в современном мире.
Информация для издателяWiley — глобальный поставщик решений для рабочих процессов с поддержкой контента в областях научных, технических, медицинских и научных исследований; профессиональное развитие; и образование. Наши основные направления деятельности выпускают научные, технические, медицинские и научные журналы, справочники, книги, услуги баз данных и рекламу; профессиональные книги, продукты по подписке, услуги по сертификации и обучению и онлайн-приложения; образовательный контент и услуги, включая интегрированные онлайн-ресурсы для преподавания и обучения для студентов и аспирантов, а также для учащихся на протяжении всей жизни.Основанная в 1807 году компания John Wiley & Sons, Inc. уже более 200 лет является ценным источником информации и понимания, помогая людям во всем мире удовлетворять их потребности и реализовывать их чаяния. Wiley опубликовал работы более 450 лауреатов Нобелевской премии во всех категориях: литература, экономика, физиология и медицина, физика, химия и мир. Wiley поддерживает партнерские отношения со многими ведущими мировыми обществами и ежегодно издает более 1500 рецензируемых журналов и более 1500 новых книг в печатном виде и в Интернете, а также базы данных, основные справочные материалы и лабораторные протоколы по предметам STMS.Благодаря расширению предложения открытого доступа, Wiley стремится к максимально широкому распространению и доступу к публикуемому контенту, а также поддерживает все устойчивые модели доступа. Наша онлайн-платформа, Wiley Online Library (wileyonlinelibrary.com), является одной из самых обширных в мире междисциплинарных коллекций онлайн-ресурсов, охватывающих жизнь, здоровье, социальные и физические науки и гуманитарные науки.
Поправочные коэффициенты Кол-во проводников
При проектировании солнечной системы таблицы, которые я предоставляю, помогут вам определить, какой ток может проходить через проводник, но эти кабели ограничены максимум 3 токонесущими проводниками в кабелепроводе.По мере увеличения количества проводников общее количество тепла от проводников будет увеличиваться, поэтому величина допустимого тока должна уменьшаться. После того, как вы отрегулируете допустимую токовую нагрузку проводов в зависимости от температуры, эта таблица предоставит вам допустимый процент допустимой токовой нагрузки. Например, вы можете использовать только 80% допустимой токовой нагрузки проводов, когда в кабельной дорожке 6 токоведущих проводов.
Что такое токопроводящий проводник?
Намерение состоит в том, чтобы считать только проводники, по которым проходит ток и которые добавят тепла всей установке.Заземляющий или соединительный проводник обычно не пропускает ток и не учитывается. Иногда считается нейтральный проводник. С солнечной батареей, если ваш массив имеет связанный отрицательный провод, который делает его нейтральным проводником постоянного тока, он будет считаться, потому что ток обычно течет через этот провод. В системах переменного тока всегда учитываются фазные провода. Если у вас есть 3 провода в системе переменного тока, 2 фазных провода с 1 нейтралью и нейтраль переносит ток от фазных проводов, нейтраль не учитывается. Любая двухпроводная схема, в которой есть фазный провод и нейтраль, учитываются.Если у вас есть 3-фазная система с 3-мя фазными проводниками и нейтралью (звездообразная система), и вы питаете что-то только с 2-х фазными проводниками и нейтралью, в этом случае учитывается нейтраль. Если ваше приложение носит промышленный характер и у вас нелинейные нагрузки, учитывается нейтраль.
| Количество проводников | Процент значений |
|---|---|
| от 4 до 6 | 80 |
| от 7 до 9 | 70 |
| от 10 до 20 | 50 |
| 21-30 | 45 |
| 31-40 | 40 |
| 41 и старше | 35 |
[связанные позиции]
АППАРАТ С ТЕКУЩЕЙ НАСТРОЙКОЙ
Данная заявка является продолжением и претендует на приоритет одновременно рассматриваемой заявки U.Заявка на патент S. Сер. № 15/696872, озаглавленный «УСТРОЙСТВО ДЛЯ ТЕРАПИИ С ТЕКУЩЕЙ РЕГУЛИРОВКОЙ», поданный 6 сентября 2017 г., который является продолжением заявки на патент США сер. № 14 / 262,234, озаглавленный «АППАРАТ И МЕТОД ДЛЯ ЭЛЕКТРИЧЕСКИ АДМИНИСТРИРУЕМОЙ ТЕРАПИИ ПРИ ИЗМЕРЕНИЯХ С ИСПОЛЬЗОВАНИЕМ ТИТРАЦИИ В ТЕКУЩЕМ ДОМЕНЕ», опубликованный 17 октября 2017 г., как патент США. № 9,789,310, который является разделом заявки на патент США сер. № 12 / 464,545, озаглавленный «МЕТОД И УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ В МОЗГЕ ВО ВРЕМЯ ЭЛЕКТРОКОНВУЛЬЗИОННОЙ ТЕРАПИИ», выпущенный апр.29, 2014, как Патент США. US 8,712,532, содержание которых полностью включено в настоящий документ посредством ссылки.
Изобретение в целом относится к области электросудорожной терапии. В частности, изобретение относится к системе и способу проведения сфокусированной электросудорожной терапии с использованием титрования в текущей области.
Судорожная терапия была впервые признана эффективным методом лечения шизофрении в 1934 году венгерским психоневрологом Фон Медуной.В ранней терапии припадков использовались методы фармакологического стимулирования. Эти ранние фармакологические методы страдали нежелательными побочными эффектами и непредсказуемостью. В 1937 году два итальянских врача, Черлетти и Бини, использовали электрическую стимуляцию, чтобы вызвать припадки для лечения припадков. Успех этого метода быстро привел к его распространению во всем мире. Использование электростимуляции для возбуждения судорог обычно называют электросудорожной терапией (ЭСТ).
ЭСТ широко использовалась в 1940-х и 1950-х годах для лечения многих тяжелых психических расстройств, включая шизофрению.Однако разработка фармакологических альтернатив терапии приступов в середине 1950-х годов сигнализировала о сокращении использования ЭСТ. В настоящее время ЭСТ используется редко. Однако из-за ограничений фармакологических альтернатив многие психиатры признали сохраняющуюся жизнеспособность ЭСТ, а некоторые предположили, что использование ЭСТ может увеличиваться.
Ранние системы ECT использовали стандартные синусоидальные электрические сигналы 50 или 60 Гц, поскольку этот тип сигнала был легко доступен в энергосистеме потребителей.После того, как исследователи установили набор параметров стимула, которые были эффективны при возникновении припадков, в системах ЭСТ больше не было необходимости иметь средства управления изменяющимися параметрами. Следовательно, некоторые ранние системы ECT были не чем иным, как сетевой розеткой, ручкой напряжения или тока и переключателем ВКЛ / ВЫКЛ.
В конце концов, электрически индуцированные сигналы были связаны с побочными эффектами у пациентов, такими как спутанность сознания и амнезия. Это побудило исследователей экспериментировать со стимульными сигналами, чтобы попытаться уменьшить или устранить побочные эффекты лечения.Это исследование привело к созданию устройств ЭСТ, способных выдавать стимул в виде импульсной волны. Кроме того, известный исследователь ЭСТ Пол Блачли решил, что оптимальное устройство ЭСТ должно включать в себя возможность мониторинга сигналов электроэнцефалографа (ЭЭГ) и электрокардиограммы (ЭКГ), иметь возможность проверять безопасность электрической цепи перед подачей стимула. и иметь возможность проводить тщательное титрование до пороговых значений судорожных припадков. После разработки и испытаний устройство, задуманное Блахли, которое было известно как MECTA (Аппарат для контролируемой электроконвульсивной терапии), появилось на рынке в 1973 году и быстро набирало популярность в последующие годы.В течение многих лет в систему MECTA продолжали вноситься дополнительные улучшения, включая повышение безопасности и возможность непрерывного мониторинга сигналов во время обработки.
Обычные системы ECT используют сигналы переменного тока. Обычно при использовании сигналов переменного тока для генерации припадков на пациенте используются симметричные электроды. Поскольку электроды симметричны, а ток двунаправлен, распределение тока в пациенте будет по существу симметричным вблизи обоих электродов.Следовательно, с обычными системами ЭСТ способность фокусировать электрические сигналы на определенной части мозга пациента чрезвычайно ограничена.
Кроме того, при проведении ЭСТ важно откалибровать систему ЭСТ в соответствии с порогом судорожных припадков отдельного пациента. Этот процесс называется титрованием. Процесс титрования важен для обеспечения максимально эффективного возникновения припадков. Эффективное создание припадков позволяет проводить более эффективное лечение и сводит к минимуму побочные эффекты лечения для пациента.В обычных системах ЭСТ используется метод титрования полной энергии заряда, при котором ширина импульса или количество импульсов сигналов регулируются до тех пор, пока не будет достигнут порог судорожного припадка у пациента. К сожалению, в обычных системах невозможно выполнять процесс титрования, изменяя только ток. Однако возможность выполнять процесс титрования, регулируя только ток, может привести к более эффективному определению порога приступа у пациента и минимизировать неблагоприятные побочные эффекты для пациента.
Изобретение направлено на устранение этих и других недостатков традиционного уровня техники.
Раскрытие представляет собой систему ЭСТ, способную фокусировать электрические сигналы на определенной части мозга пациента. Система включает в себя средство подачи однонаправленных электрических сигналов и асимметричные электроды для фокусировки сигналов на пациенте. Раскрытие также обеспечивает метод работы системы ECT, включая титрование в текущей области. Использование способа титрования по настоящему изобретению позволяет более точно определять порог приступа и, таким образом, сводить к минимуму неблагоприятные побочные эффекты лечения ЭСТ на пациента.
Вышеупомянутые и другие цели, особенности и преимущества раскрытия будут более понятны из следующего подробного описания, взятого вместе с сопроводительными чертежами, на которых:
Фиг. 1 — блок-схема системы ECT согласно изобретению;
РИС. 2A и 2B — блок-схемы схемы доставки и аппаратных средств контроля безопасности системы, показанной на фиг. 1;
РИС. С 3А по 6А — виды в разрезе отрицательных электродов согласно некоторым вариантам осуществления изобретения;
РИС.С 3B по 6B — виды сверху отрицательных электродов согласно некоторым вариантам осуществления изобретения;
РИС. 7A — вид в разрезе положительного электрода согласно варианту осуществления изобретения;
РИС. 7B — вид сверху положительного электрода согласно варианту осуществления изобретения;
РИС. 8 — блок-схема способа предоставления пациенту терапии фокальных припадков с электрическим управлением; и
ФИГ. 9 — блок-схема способа титрования системы ECT в текущей области для определения порога судорожных припадков у пациента.
Примеры вариантов осуществления описаны ниже со ссылкой на прилагаемые чертежи. Возможны многие различные формы и варианты осуществления без отклонения от сущности и идей этого раскрытия, и поэтому раскрытие не следует истолковывать как ограниченное примерными вариантами осуществления, изложенными в данном документе. Скорее, эти примерные варианты осуществления предоставлены для того, чтобы это раскрытие было исчерпывающим и полным и полностью передавало объем раскрытия специалистам в данной области техники. На чертежах размеры и относительные размеры компонентов и областей могут быть преувеличены для ясности.
Следует понимать, что, хотя термины первый, второй, третий и т. Д. Могут использоваться в данном документе для описания различных элементов, компонентов, областей, слоев и / или секций, эти элементы, компоненты, области, слои и / или секции не должны ограничиваться этими условиями. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, области, слоя или секции. Таким образом, первый элемент, компонент, область, слой или секция, обсуждаемые ниже, можно было бы назвать вторым элементом, компонентом, областью, слоем или секцией без отступления от идей настоящего раскрытия.
Терминология, используемая в данном документе, предназначена только для описания конкретных примерных вариантов осуществления и не предназначена для ограничения. Используемые здесь формы единственного числа предназначены для включения и форм множественного числа, если контекст явно не указывает иное. Кроме того, будет понятно, что термины «содержит» и / или «содержащий» при использовании в данном описании определяют наличие указанных признаков, элементов и / или компонентов, но не исключают присутствие или добавление одного или нескольких другие особенности, элементы, компоненты и / или их группы.
Если не указано иное, все термины (включая технические и научные термины), используемые в данном документе, имеют то же значение, которое обычно понимается специалистом в данной области техники, к которой относится это раскрытие. Далее следует понимать, что термины, такие как те, которые определены в обычно используемых словарях, должны интерпретироваться как имеющие значение, которое согласуется с их значением в контексте соответствующего искусства, и не будут интерпретироваться в идеализированном или чрезмерно формальном смысле, если только прямо так определено в данном документе.
РИС. 1 — блок-схема системы ECT согласно изобретению.
Ссылаясь на фиг. 1, система ECT 10 включает несколько подключений к пациенту. Первое соединение — это стимулирующие электроды ЭСТ , 12, , через которые сигнал лечения ЭСТ подается на пациента. Система ECT 10 также включает несколько входов для мониторинга пациента 13 , 14 и 16 , которые подключаются к пациенту для получения сигналов ЭЭГ, ЭКГ и / или OMS (оптического датчика движения) соответственно.
Система ECT 10 дополнительно включает в себя пользовательский интерфейс 18 , через который пользователь, обычно психиатр, взаимодействует или взаимодействует с системой ECT 10 . В одном варианте осуществления пользовательского интерфейса множество ручек 20 включено для установки параметров, которые определяют сигналы ECT. Эти параметры включают частоту сигнала, ширину каждого отдельного импульса в сигнале, текущий уровень и длительность сигнала ECT.Согласно некоторым вариантам осуществления ток сигнала ECT можно регулировать независимо от напряжения с помощью регуляторов 20 на пользовательском интерфейсе 18 . Ток также можно регулировать независимо с помощью других средств ввода, описанных ниже, таких как сенсорный экран 22 .
Пользовательский интерфейс 18 также включает в себя сенсорный экран 22 , который является сенсорным дисплеем, который позволяет пользователю вводить команды в систему, касаясь определенных частей экрана.Система управляется меню, поэтому пользователь может быстро и эффективно перемещаться по параметрам команд. Дисплей 24 предназначен для отображения определенной информации пользователю как до, так и во время лечения. Диаграммный самописец 26 обеспечивает печатную копию выходных сигналов мониторинга пациента. Система ECT 10 дополнительно включает в себя динамик 28 , который подает звуковой сигнал тревоги при возникновении определенных сбоев в системе и в качестве функции безопасности всякий раз, когда активируется секция ECT.Индикаторы 30 также предусмотрены в качестве световых индикаторов для пользователя. Предусмотрена секция управления стимулом 32 , позволяющая пользователю начать лечение. Также может быть предусмотрена секция 34 дистанционного управления, которая позволяет пользователю начать лечение, находясь вне досягаемости секции 32 управления стимулом. Секция дистанционного управления 34 , которая работает вместе с лопастями ( 334 B, 336 B на фиг. 2B), отключает секцию управления стимулом (передняя панель) 32 , так что при дистанционном управлении: оборудованные лопасти подключаются к системе ECT 10 , лечение не может быть случайно инициировано из секции управления стимулами 32 на пользовательском интерфейсе 18 .
В основе системы ECT 10 лежит компьютерная система 36 , которая управляет работой системы. Компьютерная система включает в себя четыре процессора: системный процессор 38 , процессор безопасности 40 , цифровой сигнальный процессор 42 и процессор передней панели 44 . Системный процессор 38 соединен с ручками 20 , сенсорным экраном 22 , дисплеем 24 и самописцем 26 пользовательского интерфейса 18 .Ручки 20 и сенсорный экран 22 подключены к системному процессору 38 через процессор 44 передней панели, который имитирует стандартный интерфейс клавиатуры. Таким образом, системный процессор обменивается данными с ручками 20 и сенсорным экраном 22 и от них, как со стандартной клавиатурой IBM. Таким образом, ручки 20, и сенсорный экран 22 могут быть заменены клавиатурой для обеспечения ввода в систему ECT 10 для тестирования и обслуживания.
Системный процессор , 38, также связан с секцией наблюдения за пациентом 46 через блок управления датчиками 48 . Блок управления датчиками , 48, включает в себя логику, которая декодирует сигналы, принятые от системного процессора , 38, , и конфигурирует секцию мониторинга пациента , 46, в различных режимах в ответ на это. Эти режимы включают в себя нормальный рабочий режим, в котором сигналы мониторинга пациента принимаются от пациента, и тестовые режимы, в которых проверяется точность секции.
Компьютерная система 36 также включает в себя процессор безопасности 40 . Процессор безопасности 40 в первую очередь отвечает за создание и управление доставкой формы волны стимула, а также за координацию различных тестов и проверок безопасности, которые выполняются в системе ECT 10 и ею. Процессор безопасности , 40, связан с системным процессором , 38, через последовательный интерфейс (SERIAL 1 ). Процессор безопасности 40 также соединен с секцией контроля безопасности 50 , которая включает в себя мониторы оборудования 52 и мониторы безопасности 54 .Эти мониторы 52 и 54 контролируют как оборудование, так и стимул, чтобы определить, работает ли система в рамках спецификации, и, если нет, отключить любые дальнейшие обработки.
Монитор безопасности 54 дополнительно связан с блоком ECT 56 , который генерирует сигнал ECT в ответ на процессор безопасности 40 . Блок ECT 56 напрямую связан со схемами синхронизации аналого-цифрового преобразователя 58 для приема сигнала Z_PULSE, который генерируется во время каждой выборки, взятой аналого-цифровым преобразователем 58 .Сигнал Z_PULSE используется частью измерения импеданса блока ECT 56 для измерения импеданса пациента. Аналого-цифровой преобразователь 58 оцифровывает сигналы мониторинга пациента, полученные на входах 13 , 14 и 16 (т. Е. ЭЭГ, ЭКГ и OMS). Эти оцифрованные данные затем обрабатываются процессором DSP 42 для фильтрации нежелательных частотных помех линии электропередачи с помощью частотно-адаптивного фильтра с конечной импульсной характеристикой (FIR), а также для прореживания оцифрованных данных для отображения.
Процессор безопасности 40 напрямую связан с динамиком 28 , индикаторами 30 , управлением стимулом 32 и пультом дистанционного управления 34 . Процессор безопасности 40 инициирует последовательность лечения ЭСТ при определенных заранее определенных условиях, в ответ на входные данные, полученные либо от средства управления стимулом 32 , либо от пульта дистанционного управления 34 . И блок ECT 56 , и процессор безопасности 40 также приводят в действие либо динамик 28 , либо индикаторы 30 , если существуют определенные условия, например.g., не удалось выполнить внутреннюю самопроверку. Это обеспечивает избыточную индикацию неисправности и «состояния постановки на охрану» в целях безопасности.
Последняя секция системы ECT 10 — это изолированная секция вывода данных 60 . Этот раздел связан с компьютерной системой 36 через три последовательных порта: синхронный последовательный порт (SYNC SERIAL PORT) и два асинхронных последовательных порта (SERIAL 2 , SERIAL 3 ). Компьютерная система 36 изолирована от изолированной секции вывода данных 60 блоками оптоизоляторов 62 и 64 .Блок оптоизолятора 62 вставлен между DSP 42 и цифро-аналоговым преобразователем 66 . DSP 42 передает оцифрованные сигналы мониторинга пациента на цифро-аналоговый преобразователь 66 , чтобы эти сигналы могли наблюдаться внешним оборудованием, подключенным к аналоговым выходам 68 . Точно так же системный процессор , 38, передает данные дисплея через блок оптоизолятора 64 на интерфейсный блок RS-232 70 , который предоставляет два последовательных порта вывода RS-232 72 для сохранения этих данных. , отображается или распечатывается на внешнем компьютере.Оптоизоляторы 62 и 64 защищают пациента и оператора от поражения электрическим током, которое может возникнуть, например, из-за электрических неисправностей.
Конструкция и работа системы ECT 10 более подробно описаны в патенте США No. №№ 5755744 и 6014587, которые полностью включены в настоящий документ посредством ссылки.
РИС. 2A и 2B — блок-схемы схемы доставки и оборудования мониторов безопасности системы, показанной на фиг.1.
Ссылаясь на фиг. 2A и 2B, три выхода формирователя импульсов (+, — и POWER) подключены к первичной обмотке с центральным отводом первого трансформатора T 1 . Первый трансформатор T 1 является повышающим трансформатором, так что напряжение на вторичной обмотке равно соотношению витков, умноженному на напряжение на первичной обмотке. С другой стороны, ток во вторичной обмотке уменьшается из-за отношения витков. В предпочтительном варианте передаточное число равно 16.6: 1.
Реле R 1 расположено между выходами вторичной обмотки и двумя лопастями 334 B и 336 B. Дополнительный блок дистанционного управления 338 показан подключенным между реле R 1 и лопасти 334 B и 336 B. Однако дополнительный блок дистанционного управления 338 не требуется. Когда дополнительный блок дистанционного управления 338 не предусмотрен, лопасти 334 B и 336 B могут быть простыми электродами, которые используются, когда лечение начинается с секции управления стимулом 32 .
Реле R 1 используется для включения и выключения фиктивной нагрузки R 7 в цепи вторичной обмотки первого трансформатора T 1 . Когда реле находится в положении, показанном на фиг. 2B, в цепь включается фиктивная нагрузка R 7 , и когда реле R 1 находится в другом положении, фиктивная нагрузка R 7 снимается с цепи и обмотка подключается к лопастям 334 B и 336 B.Состояние реле R 1 контролируется логическим вентилем , 382, , выход которого подключен к катушке реле через линию , 340, . Логический вентиль , 382, включает в себя два входа , 342, и , 344, для приема сигнала аппаратного отключения HW_SD и сигнала управления CNTL 2 . Логический вентиль , 382, переключается с фиктивной нагрузки на пациента, то есть на лопатки, если установлен управляющий сигнал CNTL 2 , а сигнал аппаратного выключения HW_SD не заявлен.Это дает системе возможность шунтировать импульс на фиктивную нагрузку R 7 под управлением программного обеспечения, как показано утверждением управляющего сигнала CNTL 2 , который находится под управлением процессора безопасности 40 . Управляющий сигнал CNTL 2 позволяет системе выполнить внутреннее самотестирование, в котором сигнал ECT предварительной обработки применяется к фиктивной нагрузке R 7 , а характеристики сигнала ECT затем проверяются аппаратными средствами безопасности и система выводится из строя, если какой-либо из этих тестов безопасности не проходит.
Секция контроля безопасности также включает второе реле R 2 , которое используется для короткого замыкания или отключения резистора 5 кОм R 8 в выходной цепи при определенных условиях тестирования. Эта нагрузка 5 кОм замыкается на R 2 , таким образом эффективно закорачивая вторичную обмотку первого трансформатора T 1 , когда подан управляющий сигнал CNTL 3 . Этот управляющий сигнал поступает на катушку реле R 2 через вход 346 .Резистор 5 кОм и реле R 2 используются во время самотестирования способности прибора измерять статические импедансы при нулевом сопротивлении и 5 кОм.
Второй трансформатор T 2 используется для измерения напряжения, подаваемого на фиктивную нагрузку во время испытаний перед обработкой. Напряжение на первичной обмотке второго трансформатора T 2 понижается до вторичного, которое затем измеряется схемой контроля напряжения 348 . Ток подается на вторичную обмотку от источника 350 переменного тока, который генерирует фиксированный ток в ответ на Z_PULSE, полученный на входе 352 .Это вызывает ток величиной примерно 40 □ A через вторичную обмотку второго трансформатора T 2 . Поскольку амплитуда переменного тока фиксирована, то напряжение, измеренное схемой контроля напряжения 348 , пропорционально статическому импедансу (пациента или резистора самопроверки R 8 ). Измеренное напряжение DELIV_V подается на процессор безопасности 40 из схемы контроля напряжения 348 на выходе 354 .Сигнал, соответствующий измеренному импедансу IMP, подается схемой контроля напряжения 348 на усилитель 356 , выходной сигнал которого затем выпрямляется прецизионным выпрямителем 358 и фильтруется фильтром нижних частот 360 . Выходной сигнал фильтра нижних частот 360 представляет собой сигнал Z на выходе 362 , который пропорционален измеренному статическому импедансу.
Цепи, описанные выше, измеряют так называемый «статический» импеданс.Статический импеданс в контексте ЭСТ — это импеданс, измеренный в условиях испытания очень малых токов, приложенных к пациенту (или испытательных резисторах). Статический импеданс мало изменяется при продолжении приложения тока, используемого для выполнения измерения. С другой стороны, «динамический» импеданс в контексте ЭСТ — это эффективное сопротивление, представляемое кожей головы пациента и лопастными электродами приложенному лечебному току. Динамический импеданс — это импеданс, наблюдаемый при очень высоких приложенных токах, когда ткань скальпа демонстрирует нелинейное поведение импеданса.Динамический импеданс, наблюдаемый при ЭСТ, намного ниже, чем статический импеданс, наблюдаемый при ЭСТ, и, кроме того, обычно уменьшается в течение продолжительности лечения. Динамический импеданс рассчитывается системным процессором путем деления подаваемого напряжения на подаваемый ток. Сигнал Z на линии 362 не используется для получения динамического сопротивления.
В схему также входит третий трансформатор T 3 , который используется для измерения тока через выходную цепь первого трансформатора T 1 .Третий трансформатор T 3 представляет собой повышающий трансформатор (напряжения), вторичная обмотка которого подключена к схеме контроля тока 364 , которая измеряет ток через выходную цепь. Этот сигнал измеренного тока DELIV_I затем подается на процессор безопасности 40 на выходе 366 .
Схема также обеспечивает схему контроля энергии. Монитор энергии включает в себя аналоговый умножитель 388 , преобразователь напряжения в частоту 390 , двухступенчатый счетчик 392 и схему выбора ограничения энергии 394 .Аналоговый умножитель имеет два входа: один из них подключен к схеме контроля напряжения 348 для приема сигнала измеренного напряжения DELIV_V; а второй вход подключен к схеме контроля тока , 364, для приема сигнала измеренного тока DELIV_I. Аналоговый умножитель затем умножает эти два сигнала вместе, чтобы получить сигнал доставленной мощности DELIV_P на выходе 396 . Затем подаваемый сигнал мощности подается на преобразователь , 390, напряжения в частоту, который преобразует уровень напряжения подаваемого сигнала мощности в тактовый сигнал, имеющий частоту, пропорциональную этому уровню сигнала мощности.Тактовый сигнал подается на тактовый вход счетчика 392 , который в предпочтительном варианте реализуется путем каскадного соединения двух двоичных счетчиков. Счетчики производят двоичный счет, который увеличивается с каждым нарастающим фронтом тактового сигнала от преобразователя напряжения в частоту 390 . Этот двоичный счет затем подается в схему выбора максимального предела энергии , 394, , которая сравнивает двоичный счет с предварительно установленным пределом. Если двоичный счет превышает этот предварительно установленный предел, схема 394 устанавливает сигнал ENERGY_MAX на выходе 398 , чтобы указать, что количество энергии, подаваемой пациенту во время этого лечения, превысило предварительно выбранный предел.В предпочтительном варианте осуществления предварительно выбранный предел регулируется с помощью перемычек, что позволяет устанавливать разные пределы в разных странах или при разных условиях. Должно быть очевидно, что преобразователь напряжения в частоту 390 и счетчик 392 являются лишь одной реализацией того, что по сути является интегратором, который интегрирует поданный сигнал мощности DELIV_P во времени. Конечно, можно использовать и другие интеграторы.
Лопатки 334 B и 336 B могут быть частью дополнительного комплекта дистанционного управления, который позволяет пользователю инициировать лечение ЭСТ с лопастей 334 B и 336 B.В противном случае пользователь может начать лечение только с помощью переключателя «Начать лечение» на передней панели. Одна из лопаток включает в себя двухступенчатый переключатель, представленный переключателями S 11 и S 12 на фиг. 2Б. Первый переключатель S 11 запускает тестовую последовательность предварительной обработки. Срабатывание первого переключателя S 11 определяется путем измерения тока через дополнительный блок дистанционного управления. Это достигается переключением различных сопротивлений в цепь, в соответствии с которой срабатывает переключатель.Первый переключатель S 11 нормально разомкнут, как показано на фиг. 2Б. Кроме того, второй переключатель S 12 обычно находится в показанном положении. В этом состоянии по умолчанию схема образована резисторами R 9 и R 10 , через которые подается напряжение от источника питания дистанционного управления 400 . Ток, подаваемый источником питания , 400, , обнаруживается схемой контроля тока , 402, , которая подключена к источнику питания , 400, посредством четвертого трансформатора T 4 .Монитор тока , 402, выдает сигнал RC_SENSE, который пропорционален измеренному току, подаваемому источником питания , 400, . Этот сигнал RC_SENSE подается на детектор , 404, порога, который сравнивает текущий уровень сигнала RC_SENSE, чтобы определить, превышает ли текущий уровень заранее определенную величину. Если обнаруживается недостаточный ток, схема 404 предполагает, что блок дистанционного управления 338 не подключен.Однако, если схема определяет этот минимальный уровень тока, тогда схема 404 переключает состояние переключателей S 13 , S 14 и S 15 , чтобы отключить переключатель на передней панели S 16 , так что что лечение не может быть случайно инициировано из секции управления стимулами 32 в пользовательском интерфейсе 18 .
Если срабатывает тестовый переключатель S 11 , с другой стороны, резистор R 12 подключается параллельно с резистором R 10 , тем самым представляя другую нагрузку на источник питания дистанционного управления 400 .Этот ток также измеряется монитором тока 402 .
Лечебный переключатель S 12 фактически соответствует второй ступени двухступенчатого переключателя, состоящего из S 11 и S 12 . Следовательно, S 12 может быть активирован, только если S 11 также активирован. Если срабатывает S 12 (и, следовательно, S 11 ), формируется цепь с R 9 , R 11 и светоизлучающим диодом D 3 оптопары.Пропускание тока через диод D 3 вызывает формирование сигнала оптическим детектором Q 3 , который затем передается на процессор безопасности в виде сигнала TREAT_RELEASE через переключатель S 13 . Затем этот сигнал можно использовать для определения того, сработал ли переключатель лечения S 12 до полной продолжительности лечения, запрограммированной средствами управления на передней панели.
Мостовой выпрямитель 380 может быть установлен между реле R 1 и лопастями 334 B и 336 B в зависимости от положения реле R 20 .Положение реле R 20 определяется сигналом SIGNAL_DIR. Когда реле R 20 находится в положении, показанном на фиг. 2B (первое положение), двунаправленный или импульсный сигнал переменного тока подается непосредственно от реле R 1 к лопастям 334 B и 336 B. Другими словами, когда реле R 20 находится в первом положении, мостовой выпрямитель 380 отключен. Однако, когда реле R 20 находится во втором положении (положение, противоположное положению, показанному на фиг.11B), реле R 1 подключено к лопастям 334 B и 336 B через мостовой выпрямитель 380 , тем самым доставляя однонаправленный или импульсный сигнал постоянного тока ECT на лопасти 334 B и 336 B. Когда однонаправленный сигнал ECT применяется к лопастям 334 B и 336 B, лопасть 334 B может называться положительной лопастью, а лопатка 336 B может именоваться как отрицательный весло.Из-за различной реакции мозга на направление тока однонаправленный сигнал ECT может использоваться для фокусировки стимула ECT на определенных участках мозга пациента, тем самым обеспечивая более эффективное лечение.
РИС. 3A-6A — виды в разрезе отрицательных электродов согласно некоторым вариантам осуществления изобретения. Фиг. С 3B по 6B — виды сверху отрицательных электродов согласно некоторым вариантам осуществления изобретения.
В обычных системах ECT электроды, прикрепленные к лопастям 334 B и 336 B, симметричны.Другими словами, электроды, прикрепленные к лопастям 334 B и 336 B, одинаковы для обеих лопаток. Электроды в обычных системах обычно круглые с диаметром около 2 дюймов. Однако согласно изобретению электроды, прикрепленные к лопастям 334 B и 336 B, являются асимметричными. Другими словами, электрод, прикрепленный к положительной лопасти 334 B (положительный электрод), может отличаться по размеру, форме и площади от электрода, прикрепленного к отрицательной лопасти 336 B (отрицательный электрод ).Согласно некоторым вариантам реализации как положительный, так и отрицательный электроды изготовлены из твердой нержавеющей стали 303. Однако положительный и отрицательный электроды могут быть изготовлены из разных материалов. Кроме того, положительный электрод может быть изготовлен из материала, отличного от материала отрицательного электрода.
Ссылаясь на фиг. 3A-6B отрицательный электрод , 600, включает в себя электрический контактный участок , 602, и контактный участок с пациентом, , 604, . Электрический контактный участок , 602, электрически соединяет отрицательный электрод 600 с отрицательной лопастью 336 B.Участок контакта с пациентом , 604, отрицательного электрода 600 помещается на кожу головы пациента во время лечения вместе с положительным электродом 610 (как показано на фиг. 7A и 7B) и определяет распределение электрического тока в мозг пациента. Электрический контактный участок , 602, может иметь в целом цилиндрическую форму. Согласно некоторым вариантам осуществления электрический контактный участок , 602, имеет цилиндрическую форму и высоту около 0 °.5 дюймов и диаметром около 0,32 дюйма.
Участок контакта с пациентом , 604, может иметь по существу прямоугольную форму с закругленными углами. Согласно некоторым вариантам осуществления участок , 604, для контакта с пациентом может быть прямоугольным с длиной короткой оси примерно 1 дюйм и длиной длинной оси примерно 2,5 дюйма. Углы могут иметь небольшой радиус кривизны, как показано на фиг. 3B или с большим радиусом кривизны, как показано на фиг. 4Б. В качестве примера, радиус кривизны участка контакта с пациентом , 604, на ФИГ.3B и 4B могут составлять примерно 0,125 и 0,25 дюйма соответственно. Углы могут иметь еще больший радиус кривизны, как показано на фиг. 5B, так что стороны участка для контакта с пациентом , 604, являются по существу полукруглыми. В качестве примера, радиус кривизны участка контакта с пациентом , 604, на ФИГ. 5B может составлять около 0,5 дюйма. Согласно предпочтительному варианту осуществления, как показано на фиг. 6A и 6B, участок 604 контакта с пациентом может быть по существу прямоугольным с длиной короткой и длинной оси 2 и 3 дюйма, соответственно, с радиусом кривизны углов 0.25 дюймов.
РИС. 7A — вид в разрезе положительного электрода согласно варианту осуществления изобретения. ИНЖИР. 7В — вид сверху положительного электрода согласно варианту осуществления изобретения.
Ссылаясь на фиг. 7A и 7B, положительный электрод , 610, может включать в себя электрический контактный участок , 612, и контактный участок с пациентом, , 614, . Электрический контактный участок , 612, положительного электрода , 610, может быть по существу аналогичен электрическому контактному участку , 602, отрицательного электрода , 600, , описанному выше.Участок контакта с пациентом , 614, положительного электрода , 610, может существенно отличаться по размеру, форме и площади от участка контакта с пациентом , 604, отрицательного электрода , 600, . Например, участок 614 для контакта с пациентом положительного электрода 610 может иметь по существу круглую форму с диаметром около 0,75 дюйма.
РИС. 8 представляет собой блок-схему способа предоставления пациенту терапии фокальных припадков с электрическим управлением.
Ссылаясь на фиг. 8, первый шаг в способе проведения ЭСТ пациенту состоит в наложении электродов на кожу головы пациента. Когда используются асимметричные электроды, электроды могут быть расположены на коже черепа пациента так, чтобы фокусировать электрические сигналы на определенной части мозга пациента. Например, отрицательный электрод может быть расположен на задней части головы пациента, а положительный электрод может быть расположен на передней части головы. Кроме того, отрицательный электрод может быть больше положительного.Далее пациенту проводится процедура титрования. Процедура титрования используется для оценки порога приступа или минимальной дозы электричества, необходимой для возникновения приступа. Титрование обычно проводится при первом лечении пациента с помощью достаточно слабого электрического стимула, чтобы у большинства пациентов не было приступа. Например, первый электрический стимул может быть на уровне, при котором приступ может вызвать только около 15% населения в целом.Если на самом деле припадок не происходит, один или несколько параметров сигнала ЭСТ изменяются, и измененный стимул применяется к пациенту. Этот процесс подачи сигнала, определения результата приступа и настройки сигнала ECT повторяется до тех пор, пока не будет получен удовлетворительный приступ. Как правило, процедура титрования должна быть завершена в течение пяти применений стимула к пациенту за один сеанс из-за ограничений физиологии пациента и возможностей технологии анестезии.
Процедура титрования желательна перед назначением лечения ЭСТ, потому что между пациентами наблюдаются заметные индивидуальные различия в пороге судорожного припадка. Используя стандартные подходы к титрованию, был выявлен как минимум 50-кратный диапазон пороговых значений судорожных припадков. В значительной степени эта изменчивость обусловлена индивидуальными различиями в анатомии черепа, что приводит к изменчивости тока, отводимого от мозга через кожу головы и череп. Только небольшая часть тока в любом импульсе действительно попадает в мозг.В прошлом титрованием дозировки в основном манипулировали с точки зрения количества импульсов; либо манипулируя частотой импульсов (т. е. числом импульсов в секунду), либо длительностью последовательности импульсов. Несмотря на то, что люди различаются по амплитуде пульса в тканях мозга, корректировка этих индивидуальных различий повлияла только на общее количество импульсов, получаемых пациентом. Однако титрование в текущей области в соответствии с вариантами осуществления изобретения может быть более эффективным и требовать меньшего заряда при определении порога захвата.По сравнению с традиционными методами, титрование в текущей области может привести к менее серьезным когнитивным побочным эффектам от лечения ЭСТ.
Обычно используются два метода, чтобы определить, произошел ли приступ во время процедуры титрования. Большинство современных процедур используют сигналы ЭЭГ, чтобы определить, произошел ли приступ. Обычно к пациенту подключаются два канала мониторов ЭЭГ для отслеживания припадков. Второй метод — следить за двигательными припадками.Это можно сделать с помощью оптического датчика движения, прикрепленного к пациенту.
После завершения процедуры титрования и определения порога судорожного припадка параметры системы ЭСТ устанавливаются для обеспечения желаемого лечения пациенту. Наконец, пациенту вводят желаемый сигнал ЭСТ, чтобы вызвать приступы.
РИС. 9 — блок-схема способа титрования системы ECT в текущей области для определения порога судорожных припадков у пациента.
Ссылаясь на фиг.9, способ титрования системы ECT в текущей области включает в себя сначала настройку параметров системы ECT, чтобы предоставить пациенту слаботочный начальный сигнал ECT. Обычные системы ECT имеют минимальный уровень тока 500 мА. Однако согласно некоторым вариантам осуществления изобретения минимальный уровень тока 100 мА может использоваться для титрования в текущей области. Следовательно, начальный сигнал низкого тока ECT может составлять 100 мА. На следующем этапе метода пациенту подается слаботочный начальный сигнал ЭСТ.Затем определяется, был ли достигнут порог приступа у пациента. При достижении порога занятия метод завершается. Если порог приступа не достигнут, параметры системы ECT устанавливаются так, чтобы обеспечивать постепенно более высокий текущий сигнал ECT, более высокий текущий сигнал вводится пациенту, и выполняется определение того, достигнут ли порог приступа у пациента. Этот процесс продолжается до тех пор, пока не будет достигнут порог судорожной готовности пациента.
Согласно некоторым вариантам осуществления изобретения ток удваивается при каждом последующем применении стимула до тех пор, пока не будет определен порог захвата. Кроме того, ток можно регулировать от примерно 100 мА до примерно 800 мА.
Согласно вариантам осуществления изобретения метод титрования может выполняться путем регулирования тока сигнала ECT, а не количества импульсов или ширины импульсов, как в обычных системах. Использование современного способа титрования по настоящему изобретению позволяет более точно определять порог приступа и, таким образом, сводить к минимуму неблагоприятные побочные эффекты лечения для пациента.
Следует принять во внимание, что вышеупомянутый процесс титрования может быть реализован в виде машиночитаемого носителя, содержащего код, который при выполнении заставляет систему ECT выполнять эти функции.
В соответствии с изобретением, как описано выше, система ECT включает в себя схему выпрямления, позволяющую подавать однонаправленное или постоянное воздействие тока на пациента. Система ЭСТ также включает асимметричные положительные и отрицательные электроды, позволяющие сфокусировать стимуляцию определенных участков мозга пациента.
Согласно некоторым вариантам осуществления изобретения, способ введения пациенту лечения ЭСТ включает в себя регулировку тока сигнала ЭСТ независимо от напряжения, чтобы обеспечить титрование в текущей области. Таким образом, можно более эффективно и надежно определить порог судорожного припадка у пациента.