Подключить трехфазный двигатель: Как подключить трехфазный электродвигатель в сеть 220 В: подключаем самостоятельно по схеме трехфазный электродвигатель в сеть | Денис Прокошенков
Подключить трехфазный двигатель: Как подключить трехфазный электродвигатель в сеть 220 В: подключаем самостоятельно по схеме трехфазный электродвигатель в сеть | Денис Прокошенков
Как подключить электродвигатель с 380 в к однофазному или трёхфазному питанию
Подключение трехфазного двигателя к трехфазной сети
Работа трехфазных электродвигателей считается гораздо более эффективной и производительной, чем однофазных двигателей, рассчитанных на 220 В. Поэтому при наличии трех фаз, рекомендуется подключать соответствующее трехфазное оборудование.
В результате, подключение трехфазного двигателя к трехфазной сети обеспечивает не только экономичную, но и стабильную работу устройства. В схему подключения не требуется добавление каких-либо пусковых устройств, поскольку сразу же после запуска двигателя, в обмотках его статора образуется магнитное поле.
Основным условием нормальной эксплуатации таких устройств является правильное выполнение подключения и соблюдение всех рекомендаций.
Схемы подключения
Магнитное поле, создаваемое тремя обмотками, обеспечивает вращение ротора электродвигателя. Таким образом, электрическая энергия преобразуется в механическую.
Подключение может выполняться двумя основными способами – звездой или треугольником. Каждый из них имеет свои достоинства и недостатки. Схема звезды обеспечивает более плавный пуск агрегата, однако мощность двигателя падает примерно на 30% от номинальной.
В этом случае подключение треугольником имеет определенные преимущества, поскольку потеря мощности отсутствует. Тем не менее, здесь тоже есть своя особенность, связанная с токовой нагрузкой, которая резко возрастает во время пуска. Подобное состояние оказывает негативное влияние на изоляцию проводов.
Изоляция может быть пробита, а двигатель полностью выходит из строя.
Особое внимание следует уделить европейскому оборудованию, укомплектованному электродвигателями, рассчитанными на напряжения 400/690 В. Они рекомендованы к подключению в наши сети 380 вольт только методом треугольника. В случае подключения звездой, такие двигатели сразу же сгорают под нагрузкой. Данный метод применим только к отечественным трехфазным электрическим двигателям.
В современных агрегатах имеется коробка подключения, в которую выводятся концы обмоток. Их количество может составлять три или шесть. В первом случае схема подключения изначально предполагается методом звезды. Во втором случае электродвигатель может включаться в трехфазную сеть обоими способами.
То есть, при схеме звезда три конца, расположенные в начале обмоток соединяются в общую скрутку. Противоположные концы подключаются к фазам сети 380 В, от которой поступает питание. При варианте треугольник все концы обмоток последовательно соединяются между собой.
Подключение фаз осуществляется к трем точкам, в которых концы обмоток соединяются между собой.
Использование схемы «звезда-треугольник»
Сравнительно редко используется комбинированная схема подключения, известная как «звезда-треугольник». Она позволяет производить плавный пуск при схеме звезда, а в процессе основной работы включается треугольник, обеспечивающий максимальную мощность агрегата.
Данная схема подключения довольно сложная, требующая использования сразу трех магнитных пускателей, устанавливаемых в соединения обмоток. Первый МП включается в сеть и с концами обмоток. МП-2 и МП-3 соединяются с противоположными концами обмоток.
Подключение треугольником выполняется ко второму пускателю, а подключение звездой – к третьему. Категорически запрещается одновременное включение второго и третьего пускателей. Это приведет к короткому замыканию между фазами, подключенными к ним.
Для предотвращения подобных ситуаций между этими пускателями устанавливается блокировка. Когда включается один МП, у другого происходит размыкание контактов.
Работа всей системы происходит по следующему принципу: одновременно с включением МП-1, включается МП-3, подключенный звездой. После плавного пуска двигателя, через определенный промежуток времени, задаваемый реле, происходит переход в обычный рабочий режим. Далее происходит отключение МП-3 и включение МП-2 по схеме треугольника.
Трехфазный двигатель с магнитным пускателем
Подключение трехфазного двигателя с помощью магнитного пускателя, осуществляется также, как и через автоматический выключатель. Просто эта схема дополняется блоком включения и выключения с соответствующими кнопками ПУСК и СТОП.
Одна нормально замкнутая фаза, подключенная к двигателю, соединяется с кнопкой ПУСК. Во время нажатия происходит смыкание контактов, после чего ток поступает к двигателю. Однако, следует учесть, что в случае отпускания кнопки ПУСК, контакты окажутся разомкнутыми и питание поступать не будет.
Чтобы не допустить этого, магнитный пускатель оборудуется еще одним дополнительным контактным разъемом, так называемым контактом самоподхвата. Он выполняет функцию блокировочного элемента и препятствует разрыву цепи при выключенной кнопке ПУСК.
Окончательно разъединить цепь можно только с помощью кнопки СТОП.
Таким образом, подключение трехфазного двигателя к трехфазной сети может быть выполнено различными способами. Каждый из них выбирается в соответствии с моделью агрегата и конкретными условиями эксплуатации.
Бывает, что в руки попадает трехфазный электродвигатель. Именно из таких двигателей изготавливают самодельные циркулярные пилы, наждачные станки и разного рода измельчители.
В общем, хороший хозяин знает, что можно с ним сделать. Но вот беда, трехфазная сеть в частных домах встречается очень редко, а провести ее не всегда бывает возможным.
Но есть несколько способов подключить такой мотор к сети 220в.
Следует понимать, что мощность двигателя при таком подключении, как бы вы ни старались — заметно упадет. Так, подключение «треугольником» использует только 70% мощности двигателя, а «звездой» и того меньше — всего 50%.
В связи с этим двигатель желательно иметь помощнее.
Важно! Подключая двигатель, будьте предельно осторожны. Делайте все не спеша. Меняя схему, отключайте электропитание и разряжайте конденсатор электролампой. Работы производите как минимум вдвоем.
Итак, в любой схеме подключения используются конденсаторы. По сути, они выполняют роль третьей фазы.
Благодаря ему, фаза к которой подключен один вывод конденсатора, сдвигается ровно настолько, сколько необходимо для имитации третьей фазы. Притом что для работы двигателя используется одна емкость (рабочая), а для запуска, еще одна (пусковая) в параллель с рабочей. Хотя не всегда это необходимо.
Например, для газонокосилки с ножом в виде заточенного полотна, достаточно будет агрегата 1 кВт и конденсаторов только рабочих, без надобности емкостей для запуска. Обусловлено это тем, что двигатель при запуске работает на холостом ходу и ему хватает энергии раскрутить вал.
Если взять циркулярную пилу, вытяжку или другое устройство, которое дает первоначальную нагрузку на вал, то тут без дополнительных банок конденсаторов для запуска не обойтись.
Кто-то может сказать: «а почему не подсоединить максимум емкости, чтобы мало не было?» Но не все так просто. При таком подключении мотор будет сильно перегреваться и может выйти из строя.
Не стоит рисковать оборудованием.
Важно! Какой бы емкости ни были конденсаторы, их рабочее напряжение должно быть не ниже 400в, в противном случае они долго не проработают и могут взорваться.
Рассмотрим сначала как подключается трехфазный двигатель в сеть 380в
Трехфазные двигатели бывают, как с тремя выводами — для подключения только на «звезду», так и с шестью соединениями, с возможностью выбора схемы ― звезда или треугольник. Классическую схему можно видеть на рисунке. Здесь на рисунке слева изображено подключение звездой. На фото справа, показано как это выглядит на реальном брне мотора.
Видно, что для этого необходимо установить специальные перемычки на нужные вывода. Эти перемычки идут в комплекте с двигателем. В случае когда имеется только 3 вывода, то соединение в звезду уже сделано внутри корпуса мотора. В таком случае изменить схему соединения обмоток попросту невозможно.
Некоторые говорят, что так делали для того, чтобы рабочие не воровали агрегаты по домам для своих нужд. Как бы там ни было, такие варианты двигателей, можно с успехом использовать для гаражных целей, но мощность их будет заметно ниже, чем соединенных треугольником.
Схема подключения 3-х фазного двигателя в сеть 220в соединенного звездой
Как видно, напряжение 220в распределяется на две последовательно соединенные обмотки, где каждая рассчитана на такое напряжение. Поэтому теряется мощность почти в два раза, но использовать такой двигатель можно во многих маломощных устройствах.
Максимальной мощности двигателя на 380в в сети 220в можно достичь, только используя соединение в треугольник. Кроме минимальных потерь по мощности, неизменным остается и число оборотов двигателя. Здесь каждая обмотка используется на свое рабочее напряжение, отсюда и мощность. Схема подключения такого электродвигателя изображено на рисунке 1.
Рис. 1
На рис.2, изображено брно с клеммой на 6 выводов для возможности подключения треугольником. На три получившихся вывода, подается: фаза, ноль и один вывод конденсатора. От того, куда будет подключен второй вывод конденсатора ― фаза или ноль, зависит направление вращения электродвигателя.
На фото: электродвигатель только с рабочими конденсаторами без емкостей для запуска.
Если на вал будет начальная нагрузка, необходимо использовать конденсаторы для запуска. Они соединяются в параллель с рабочими, используя кнопку или переключатель на момент включения.
Как только двигатель наберет максимальные обороты, емкости для запуска должны быть отключены от рабочих. Если это кнопка, просто отпускаем ее, а если выключатель, то отключаем.
Дальше двигатель использует только рабочие конденсаторы. Такое соединение изображено на фото.
Как подобрать конденсаторы для трехфазного двигателя, используя его в сети 220в
Первое, что нужно знать ― конденсаторы должны быть неполярными, то есть не электролитическими. Лучше всего использовать емкости марки ― МБГО. Их с успехом использовали в СССР и в наше время. Они прекрасно выдерживают напряжение, скачки тока и разрушающее воздействие окружающей среды.
Также они имеют проушины для крепления, помогающие без проблем расположить их в любой точке корпуса аппарата. К сожалению, достать их сейчас проблематично, но существует множество других современных конденсаторов ничем не хуже первых. Главное, чтобы, как уже говорилось выше, рабочее напряжение их не было меньше 400в.
Расчет конденсаторов. Емкость рабочего конденсатора.
Чтобы не обращаться к длинным формулам и мучить свой мозг, есть простой способ расчета конденсатора для двигателя на 380в. На каждые 100 Вт (0,1 кВт) берется — 7 мкФ. Например, если двигатель 1 кВт, то рассчитываем так: 7 * 10 = 70 мкФ. Такую емкость в одной банке найти крайне трудно, да и дорого. Поэтому чаще всего емкости соединяют в параллель, набирая нужную емкость.
Емкость пускового конденсатора
Это значение берется из расчета в 2-3 раза больше, чем емкость рабочего конденсатора. Следует учитывать, что эта емкость берется в сумме с рабочей, то есть для двигателя 1 кВт рабочая равна 70 мкФ, умножаем ее на 2 или 3, и получаем необходимое значение. Это 70-140 мкФ дополнительной емкости — пусковой. В момент включения она соединяется с рабочей и в сумме получается — 140-210 мкФ.
Особенности подбора конденсаторов
Конденсаторы как рабочие, так и пусковые можно подбирать методом от меньшего к большему. Так подобрав среднюю емкость, можно постепенно добавлять и следить за режимом работы двигателя, чтобы он не перегревался и имел достаточно мощности на валу. Также и пусковой конденсатор подбирают добавляя, пока он не будет запускаться плавно без задержек.
Кроме указанного выше типа конденсатора — МБГО, можно использовать тип — МБГЧ, МБГП, КГБ и тому подобные.
Реверс
Иногда возникает необходимость менять направление вращения электродвигателя. Такая возможность есть и у двигателей на 380в, используемых в однофазной сети. Для этого нужно сделать так, чтобы конец конденсатора, подключенный к отдельной обмотке, оставался неразрывным, а другой мог перебрасываться с одной обмотки, где подключен «ноль», к другой где — «фаза».
Такую операцию может делать двухпозиционный переключатель, на центральный контакт которого подключается вывод от конденсатора, а на два крайних вывода от «фазы» и «нуля».
Более подробно можно увидеть на рисунке.
Важно! Существуют электродвигатели трехфазные на 220в. У них каждая обмотка рассчитана на 127в и при подключении в однофазную сеть по схеме «треугольник» ― двигатель просто сгорит. Чтобы этого не произошло, такой мотор в однофазную сеть следует подключать только по схеме — «звезда». Обсудить статью на форумеДобавить комментарий, отзыв
Подключение электродвигателя на 380 вольт. Схемы подключения
схемы соединения обмоток и конденсаторы, емкость, реверс
Подключение трёхфазного двигателя к однофазной цепи может потребоваться просто потому, что другого нет под рукой, или нужно сэкономить, или просто захотелось смастерить что-то своими руками из старых запасов. Тем более асинхронники (это практически все 3-фазные электромоторы, могущие встретиться на жизненном пути Самоделкина) имеют одно очень важное конструкционное преимущество: у них нет электрических щёток — лишней расходной детали.
Подключение двигателя 380 на 220
380в — это напряжение между фазами в трёхфазной цепи (линейное), а 220в — напряжение между фазой и нулём (фазное) в той же самой цепи. В обычной однофазной цепи: дома, на даче или в гараже есть только два провода — ноль и фаза; сейчас в новых постройках появился защитный ноль (заземление) — провод жёлто-зелёного цвета, он подходит к «рогам» розетки, его в расчёт не принимаем, о заземлении разговор совсем другой.
Возникает вопрос о том, где взять недостающие фазы. Применение фазорасщепителя или инвертора (устройство, преобразующее однофазный электрический ток в трёхфазный) рассматривать не будем, не стоит принимать во внимание и индукционный с помощью катушек индуктивности способ сдвига фаз. Пойдём другим путём, ёмкостным — подключение электродвигателя 380 В на 220 В через конденсатор. Этот метод является самым простым и оптимальным, легким в реализации.
То, что имеется сам трёхфазный электродвигатель, ясно по умолчанию, нужно только определить схему подключения его обмоток и как подключить двигатель 380 на 220. Для этого надо вскрыть клеммную коробку электродвигателя и если в ней только три клеммы, стало быть, обмотки статора соединены звездой и для переделки на треугольник, а когда на шильдике движка указано рабочее напряжение 380 В, то это нужно, придётся открывать заднюю крышку мотора, искать выводы обмоток, переключать их. Тут рекомендуется позвать опытного электрика.
В коробке шесть клемм, расположенных двумя рядами — по три штуки в каждом. Рассмотрим возможные варианты
Три клеммы ОДНОГО ряда соединены между собой — звезда.
МЕЖДУРЯДНОЕ соединение клемм попарно — треугольник.
Какую схему соединения обмоток выбрать
Читаем информацию о рабочем напряжении на табличке:
380В — только треугольник.
380В/220В — треугольник или звезда.
220/127 — только звезда. Очень редкий вариант.
Нужно иметь в виду, что при соединении треугольником на обмотку попадает напряжение в 1,7 раза больше, чем при соединении звездой, а значит и реализуемая мощность будет выше, но звезда обеспечивает плавный пуск.
Подбираем конденсатор
В цепи переменного тока — а это как раз наш случай — не стоит пользоваться полярными, имеющими плюсовой и минусовой контакты (анод и катод) конденсаторами. Но при необходимости эту проблему обойти можно путём использования диодного моста или двух полярных конденсаторов, объединённых в один соединением одноимённых контактов, но тут опять лучше позвать опытного электрика.
Существует формула потребной ёмкости рабочего конденсатора, но рассчитав по ней, равно потребуется проверять работу устройства на практике. Если есть какие-то конденсаторы лучше сразу перейти к методу вдумчивого подбора, но именно вдумчивого, а не совсем бездумного. Конденсаторы должны быть неполярными, обладать одинаковым рабочим напряжением никак не менее 300 В, но лучше 400 В и выше.
Рабочее напряжение конденсаторов должно быть ОДИНАКОВЫМ, иначе тот, где оно меньше, выйдет из строя.
Начните со значения 30 микрофарад (μF) на 1 киловатт паспортной мощности мотора при соединении обмоток статора звездой, при треугольнике можно пробовать с 50−70 μF. Электродвигатель на холостом ходу (без нагрузки) должен запуститься и набрать обороты не особо нагреваясь, продолжительная работа на холостом ходу нежелательна, двигатель может сгореть. Если холостой запуск происходит нормально, без перегрева и запаха гари, то рабочий конденсатор подобран, на нём и будет работать, подключайте нагрузку и продолжайте испытания уже в рабочем состоянии.
А если подключение электродвигателя 380 В на 220 В через конденсатор происходит сразу под серьёзной нагрузкой? Тут потребуется стартовый конденсатор, его ёмкость нужно начинать подбирать со значений в полтора раза больше, чем рабочий. Пример: рабочий 60 μF, тогда стартовый первоначально ставим на 90 μFи, если нормального запуска нет, то добавляем ёмкость пусковой цепи конденсаторов (примерная ёмкость пусковой цепи составляет до трёх рабочей, в нашем примере до 180 μF). После выхода на рабочие обороты пусковые конденсаторы выключаются, остаётся только рабочий. Цепи рабочего и пускового конденсаторов параллельны, в каждую можно поставить отдельный выключатель.
В бытовой сети не нужно использовать устройства мощностью более 3 квт — сработает защита или сгорит проводка.
Подсчет итоговой ёмкости
При параллельном соединении конденсаторов их ёмкости складываются, а вот при последовательном — наоборот, суммарная ёмкость будет меньше, тут равна сумма обратных значений. Когда два одинаковых конденсатора соединяются параллельно суммарная ёмкость удваивается, а если последовательно, то уменьшается в два раза. То есть сумма ёмкости двух конденсаторов по 100 микрофарад может быть и 200 μF, и 50 μF. Всё зависит от типа их соединения между собой.
Другой пример: суммарная ёмкость конденсаторов 60 μF и 90 μF при параллельном соединении будет 150 μF, при последовательном — 36 μF. Это можно творчески использовать при подборе из того, что есть, или при покупке подешевле.
Реверс
Для изменения направления вращения ротора нужно переключить ёмкостную цепь на другой провод или клемму коробки электродвигателя. На одну клемму подаётся фаза, на другую ноль, включение конденсаторной группы производим к третьей. Теперь при подключении второго провода конденсатора к фазе мотор крутится в одну сторону, к нулю — в другую.
Этого достаточно, чтобы разобраться в том как подключить трёхфазный двигатель на 220, но если всё получилось и вроде работает правильно крутит, не греется, не горит окончательно убедиться в правильности собранной схемы поможет нехитрая и в этом случае необязательная проверка. Во время работы с постоянной, одинаковой нагрузкой с помощью токоизмерительных клещей померьте токи в фазном, нулевом и конденсаторном проводах. В идеале они должны быть равны между собою, если и есть небольшие различия (процентов 30), то это не идеал, но всё-таки хорошо.
А исправляется различие токов просто — путём изменения ёмкости рабочего конденсатора. Нужно не делать резких движений и не сжечь обмотку, установив слишком большую ёмкость рабочего конденсатора.
youtube.com/embed/kGOGXbL5FNk»/>
принцип работы, схема подключения к трёхфазной сети 380 вольт
Трёхфазные электродвигатели получили большое распространение как в промышленном использовании, так и в личных целях благодаря тому что они значительно эффективнее двигателей для обычной двухфазной сети.
Принцип действия трёхфазного двигателя
Трехфазный асинхронный двигатель представляет собой устройство, состоящее из двух частей: статора и ротора, которые разделены воздушным зазором и не имеют никакой механической связи друг с другом.
На статоре расположены три обмотки, намотанные на специальном магнитопроводе, который набран из пластин специальной электротехнической стали. Обмотки намотаны в пазах статора и расположены под углом в 120 градусов друг к другу.
Ротор представляет собой конструкцию, опирающуюся на подшипники, имеющую крыльчатку для вентиляции. В целях электропривода ротор может иметь прямую связь с механизмом либо через редукторы или другие системы передачи механической энергии. Роторы в асинхронных машинах могут быть двух видов:
Короткозамкнутый ротор, который представляет собой систему проводников соединенных с торцов кольцами. Образуется пространственная конструкция, напоминающая беличье колесо. В роторе индуцируются токи, создающее свое поле, взаимодействующее с магнитным полем статора. Это и приводит в движение ротор.
Массивный ротор – это цельная конструкция из ферромагнитного сплава, в которой одновременно индуцируются токи и являющаяся магнитопроводом. Благодаря возникновению в массивном роторе вихревых токов идет взаимодействие магнитных полей, которое и является движущей силой ротора.
Главной движущей силой в трехфазном асинхронном двигателе является вращающееся магнитное поле, которое возникает, во-первых, благодаря трехфазному напряжению, а, во-вторых, взаимному расположению обмоток статора. Под его воздействием в роторе возникают токи, создающее поле, которое взаимодействует с полем статора.
Асинхронным двигатель называют из-за того, что частота вращения ротора отстает от частоты вращения магнитного поля, ротор постоянно пытается «догнать» поле, но его частота всегда меньше.
Главные преимущества асинхронных двигателей
Простота конструкции, которая достигается за счет отсутствия коллекторных групп, имеющие быстрый износ и создающие дополнительное трение.
Для питания асинхронного двигателя не требуется дополнительных преобразований, он может питаться прямо из промышленной трехфазной сети.
За счет сравнительно небольшого количества деталей асинхронные двигатели очень надежны, имеют долгий срок эксплуатации, просты в техническом обслуживании и ремонте.
Конечно, трехфазные машины не лишены недостатков
Асинхронные электродвигатели имеют чрезвычайно малый пусковой момент, что ограничивает сферу их применения.
При запуске эти двигатели потребляют большие токи при пуске, которые могут превышать допустимые в конкретной системе электроснабжения.
Асинхронные двигатели потребляют немалую реактивную мощность, которая не приводит к увеличению механической мощности двигателя.
Различные схемы подключения асинхронных двигателей к сети 380 вольт
Для того чтобы заставить работать двигатель существует несколько различных схем подключения, наиболее используемые среди них — звезда и треугольник.
Как правильно подключить трехфазный двигатель «звездой»
Такой способ подключения применяется в основном в трехфазных сетях с линейным напряжением 380 вольт. Концы всех обмоток: C4, C5, C6 (U2, V2, W2), — соединяются в одной точке. К началам обмоток: C1, C2, C3 (U1, V1, W1), — через аппаратуру коммутации подключаются фазные проводники A, B, C (L1, L2, L3). При этом напряжение между началами обмоток будет 380 вольт, а между местом подключения фазного проводника и местом соединения обмоток буде составлять 220 вольт.
На табличке электродвигателя указывается возможность подключения по способу «звезда» в виде символа Y, а также может указываться и можно ли подключить по другой схеме. Соединение по такой схеме может быть с нейтралью, которая подключается к точке соединения всех обмоток.
Такой подход позволяет эффективно защитить электродвигатель от перегрузок при помощи четырехполюсного автоматического выключателя.
Соединение «звездой» не позволяет электродвигателю, приспособленному для сетей 380 вольт развить полную мощность в силу того, что на каждой отдельной обмотке будет напряжение в 220 вольт. Однако, такое соединение позволяет не допустить перегрузки по току, старт электродвигателя происходит плавно.
В клеммной коробке будет сразу видно, когда электродвигатель соединен по схеме «звезда». Если есть перемычка между тремя выводами обмоток, то это однозначно говорит о том, что применяется именно эта схема. В любых других случаях применяется другая схема.
Выполняем соединение по схеме «треугольник»
Для того чтобы трехфазный двигатель мог развить свою максимальную паспортную мощность используют подключение, которое получило название «треугольник». При этом конец каждой обмотки соединяют с началом последующей, что в действительности образует на принципиальной схеме треугольник.
Выводы обмоток соединяют следующим образом: C4 соединяют с C2, С5 с C3, а С6 с C1. При новой маркировке это выглядит так: U2 соединяется с V1, V2 с W1, а W2 cU1.
В трехфазных сетях между выводами обмоток будет линейное напряжение 380 вольт, а соединение с нейтралью (рабочим нулем) не требуется. Такая схема имеет особенность еще и в том, что возникают большие пусковые токи, которые может не выдержать проводка.
На практике иногда применяют комбинированное подключение, когда на этапе запуска и разгона используется подключение «звездой», а в рабочем режиме специальные контакторы переключают обмотки на схему «треугольник».
В клеммной коробке подключение треугольником определяется наличием трех перемычек между клеммами обмоток. На табличке двигателя возможность подключения треугольником обозначается символом Δ, а также может указываться мощность, развиваемая при схеме «звезда» и «треугольник».
Трехфазные асинхронные двигатели занимают значительную часть среди потребителей электроэнергии благодаря своим очевидным достоинствам.
Наглядное и простое объяснение принципа работы в видео
Как подключить однофазный двигатель к трехфазному частотнику
Частотное управление электроприводами активно развивается и все чаще можно услышать о новом методе управления, или улучшенном частотнике, или о внедрении частотного электропривода в какой-то сфере, где ранее никто и подумать не мог что это возможно. Но это факт!
Если мы внимательно рассмотрим электродвигатели, к которым применяют частотное регулирование – то это асинхронные или синхронные трехфазные двигатели. Существует несколько разновидностей преобразователей частоты. Но ведь есть и однофазные асинхронные машины, почему прогресс не касается их? Почему частотное управление не применяют так активно к однофазным машинам? Давайте рассмотрим. Содержание:
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120 0 , на статор наматывают еще и пусковую П, которая имеет фазную зону 60 0 . Также пусковая обмотка сдвигается относительно рабочей на 90 0 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Итак, все чаще появляются предложения частотных преобразователей, которые могут управлять однофазными асинхронными машинами. В силу того что частотники предназначены для работы с трехфазными машинами, то для регулирования оборотов однофазной машинами необходим особый вид частотного преобразователя. Это обусловлено тем, что трехфазные и однофазные машины имеют немного разный принцип работы. Давайте рассмотрим схему включения, которую предоставляет один из официальных производителей частотных преобразователей для однофазных машин:
Это схема прямого подключения. Где: Ф-фаза питающего напряжения, N-нейтральный проводник, L1, L2 – обмотки двигателя, Ср – рабочий конденсатор.
А вот схема подключения преобразователя:
Как мы можем видеть, конденсатор при включении данной схемы отключается. Обмотка L1 переключается к выходу преобразователя фазы А, а L2 к В. Общий провод подключается к выходу С. Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение.
Данный способ частотного регулирования трудно назвать однофазным, так как при питания двигателя от сети напрямую необходимо опять восстанавливать схему с конденсатором. Более того, этот способ регулирования частоты НЕ ПОДХОДИТ для машин с пусковой обмоткой, так как сопротивление рабочей и пусковой обмотки не равны, появится асимметрия.
Можем сделать вывод, что данный вид частотного регулирования подходит не всем электродвигателям, а только конденсаторным. Более того, при такой схеме подключения необходимо провести переподключение обмоток внутри электродвигателя (в коробке выводов электродвигателя), что после переподключения не позволит работать ему от сети напрямую. Поэтому если вы собираетесь питать электродвигатель от однофазной сети через частотник, то, может быть стоит купить преобразователь, который питается от однофазной сети, а двигатель обычный, трехфазный. Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.
Помимо распространенных 3-х фазных асинхронных двигателей, на рынке предлагают однофазные моторы. Чаще всего ими являются насосы и вентиляторы. Самые популярные агрегаты в промышленности и в быту. И тут возникает вопрос? Как же ими управлять и регулировать скорость. Способов великое множество. Но самый эффективный, это когда подключают преобразователь частоты для однофазного двигателя.
Из этой статьи вы узнаете:
Всем привет! С вами Гридин Семён, и в этом посте мы поговорим с вами о нюансах управления асинхронными однофазными двигателями. Какой способ управления лучше? Разберём такой вопрос — частотное управление двигателем более подробно.
Однофазный асинхронный двигатель
Наибольшее применение такие моторы нашли в быту и малом бизнесе. Они необходимы там, где нет трёхфазной сети. Мощность их ограничивается лишь частотой сети. Сами по себе аппараты маломощные, в диапазоне от 500 Ватт до 2 килоВатт.
Принцип работы однофазного двигателя заключается в смещении обмоток в пространстве относительно друг друга. Ключевым моментом является сдвиг фазы в обмотках на 120 градусов. Главным «фазосдвигателем» у нас является конденсатор. Как правило, он подключён последовательно в цепи статорной обмотки.
По конструкции моторы могут различаться. Так что, не к любому можно подключить преобразователь частоты, нужно обращать внимание прежде всего на схему подключения обмоток. Двухфазный двигатель с рабочей и пусковой обмоткой точно не сможет запуститься, совсем другой принцип работы. Мы к этому ещё вернёмся.
Способы подключения мотора
А теперь давайте рассмотрим несколько способов подключений:
конденсаторный способ;
частотный способ;
фазовое управление с помощью симистора;
Какой из способов лучше всего? Знаете, всё зависит от задачи, которую нужно решить. А так на вкус и цвет, сами знаете.
Если вы мало знакомы с преобразователем частоты, можете ознакомиться в статье «Чего вы не знаете о преобразователе частоты?»
Конденсаторный способ подключений
Бюджетное подключение трехфазных моторов к однофазной сети. Просто цепляем конденсатор последовательно в цепи обмотки и превращаем аппарат из трехфазного в однофазный. Вот схема:
Сп — пусковой конденсатор, а Ср — рабочий конденсатор. Как подбирать ёмкость в этом случае я расписывать не буду. В просторах интернета есть полно информации по этому поводу.
Фазовое управление с помощью симистора
Это один из самый старых способов управления. Две обмотки двигателя подключаются параллельно, одна из них с конденсатором. К точкам обмоток соединяем симисторный регулятор. Их актуальность, по-моему мнению, ещё не пропала. Лучше всего использовать для не тяжёлых нагрузок (вентиляторы, насосы).
Важно! Учитывайте, что сим. блоки в основном предназначены для активной нагрузки. Так как мотор — это индуктивная нагрузка, поэтому активный ток делим примерно на 10. Если ток активной нагрузки равен 50, то индуктивный будет 5.
На выходе устройства формируется напряжение сетевой частоты 50 Гц и настраивается среднеквадратичное число. Таким образом мы меняем время открытого состояния симистора за период следования напряжения. Единственный недостаток: момент на валу падает относительно снижения напряжения. Вот вам пример Autonics SPK1:
Входы для регулировки скорости универсальные. Сюда можно подключить и потенциометр 1 кОм, и датчик с токовым сигналом 4-20 мА, и напряжение 0-5 В.
Частотный способ
О популярности преобразователя частоты нет смысла говорить. Так как это устройство давно известно всем. Частотный способ является основным в нашем 21 веке. Скорость регулируется с помощью ШИМ-модуляции. Достаточно сложный девайс, требующий отдельной статьи. По входному напряжению существуют как и 380 В, так и 220В. Но что же получается по выходу?
На рынке есть готовые варианты и на однофазный, и на трёхфазный электродвигатель. Просто нужно подобрать схемное решение.
Но, бывают случаи когда ПЧ с однофазным выходом не по карману. Или у вас на полке лежит трёхфазный ПЧ. Давайте рассмотрим вариант подключения мотора к преобразователю частоты.
Подключение преобразователя частоты и однофазного двигателя
В такой схеме есть ряд существенных недостатков:
Запуск двигателя происходит при минимальной частоте 30 Гц;
Частоту ниже 30 Гц можно регулировать, но не рекомендуется, очень вредно для движка;
Есть нюанс с настройкой пускового напряжения, требуется немного загрублять параметр;
Для решения вопроса с подключением двух устройств поможет нам обычный дроссель. Катушка индуктивности поможет нам подавить ёмкость в схеме, таким образом давая возможность частотнику спокойно подавать синусоиду на движок. Да, вот схема:
Всё элементарно, правда. Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Производителей ПЧ в мире очень много. Поэтому из настроек я могу направить вас примерно и в общих чертах, если будут возникать проблемы с подключениями. Основная мысль заключается в том, что при пуске двигателя минимальное напряжение и частоту поднять вверх. Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
И еще рекомендую ограничить минимальную частоту на 30 Гц, чтобы не допустить запуска вхолостую и перегрева. Двигатель начинает сильно греться, при пуске на низких частотах.
На этом у меня всё, друзья.
Мне очень нравится кататься на велосипеде. Ещё больше — модернизировать, добавлять что-то новое и интересное. Я совсем недавно в просторах интернета нашёл комплект электромотора для заднего колеса. Комплекты существуют, как и для переднего колеса, так и для заднего:
Соединение звездой в трехфазной системе — соотношение между фазой и линией, напряжением и током
В соединении звездой аналогичные концы (начало или конец) трех обмоток соединены с общей точкой, называемой звездой или нейтралью. точка. Трехлинейные проводники отходят от остальных трех свободных клемм, называемых линейными проводниками .
Провода подводятся к внешней цепи, образуя трехфазные трехпроводные системы, соединенные звездой. Однако иногда четвертый провод проводится от точки звезды к внешней цепи, называемый нейтральным проводом , образуя трехфазные четырехпроводные системы, соединенные звездой.
Состав:
Соединение звездой показано на схеме ниже:
Принимая во внимание приведенный выше рисунок, конечные клеммы a 2 , b 2 и c 2 трех обмоток соединены, образуя звезду или нейтраль. Три проводника, обозначенные как R, Y и B, отходят от остальных трех свободных клемм, как показано на рисунке выше.
Ток, протекающий через каждую фазу, называется Фазный ток I ph , а ток, протекающий через каждый линейный провод, называется Line Current I L . Аналогичным образом, напряжение на каждой фазе называется Phase Voltage E ph , а напряжение на двух линейных проводниках известно как Line Voltage E L .
Зависимость между фазным напряжением и линейным напряжением при соединении звездой
Подключение звездой показано на рисунке ниже:
Поскольку система сбалансирована, сбалансированная система означает, что во всех трех фазах, то есть R, Y и B, через них протекает равное количество тока.Следовательно, три напряжения E NR , E NY и E NB равны по величине, но электрически смещены друг от друга на 120 °.
Диаграмма Phasor соединения звездой показана ниже:
Стрелки на ЭДС и токе указывают направление, а не их фактическое направление в любой момент.
Сейчас,
Между любыми двумя линиями есть двухфазные напряжения.
По следам петли НРИН
Чтобы найти векторную сумму ENY и –ENR, мы должны обратить вектор ENR и сложить его с ENY, как показано на векторной диаграмме выше.
Следовательно,
Аналогично
Следовательно, при соединении звездой линейное напряжение в 3 раза больше фазного напряжения.
Соотношение между фазным током и линейным током при соединении звездой
Тот же ток течет через фазную обмотку, а также в линейный провод, поскольку он включен последовательно с фазной обмоткой.
Где будет фазный ток:
Линейный ток будет:
Следовательно, в трехфазной системе звездообразного соединения линейный ток равен фазному току.
Имитация привода двигателя переменного тока
— MATLAB и Simulink
Моделирование привода двигателя переменного тока
Чтобы использовать модели привода переменного тока библиотеки Electric Drives, вы сначала указываете типы
двигатели, преобразователи и контроллеры, используемые в шести моделях приводов переменного тока библиотеки
обозначены от AC1 до AC6. Модели AC1, AC2, AC3 и AC4 основаны на трехфазном
Индукционный двигатель. Этот двигатель имеет трехфазную обмотку на статоре и намотанный ротор или
ротор с короткозамкнутым ротором.Ротор с короткозамкнутым ротором состоит из пазов токопроводящих стержней.
встроен в железный ротор. Проводящие шины закорочены вместе на каждом конце.
ротора токопроводящими кольцами. Модель AC5 основана на синхронном роторе с фазным ротором.
двигатель, а в модели AC6 используется синхронный двигатель с постоянными магнитами. Эти двигатели переменного тока
питается переменным напряжением переменного тока и частотой, создаваемыми инвертором. Тип инвертора
в шести моделях приводов переменного тока используется инвертор источника напряжения (VSI) в том смысле, что
этот инвертор питается постоянным напряжением постоянного тока.Это постоянное напряжение обеспечивается
неуправляемый диодный выпрямитель и конденсатор (емкостное напряжение шины постоянного тока).
Динамическое торможение
Когда шина постоянного тока обеспечивается диодным выпрямителем, привод
не имеет возможности двунаправленного потока мощности и поэтому не может
выполнить рекуперативное торможение. В моделях AC1, AC2, AC3, AC4 и AC6
тормозной резистор, включенный последовательно с прерывателем, обеспечивает торможение
моторно-нагрузочная система. Эта схема торможения называется динамическим торможением.Он размещен параллельно шине постоянного тока, чтобы предотвратить ее напряжение.
от увеличения при замедлении двигателя. С динамическим торможением,
кинетическая энергия системы двигатель-нагрузка преобразуется в тепло
рассеивается в тормозном резисторе.
Методы модуляции
Инверторы VSI, используемые в моделях приводов переменного тока библиотеки, основаны на
по двум типам модуляции, гистерезисной модуляции и пространственному вектору
широтно-импульсная модуляция (ШИМ).
Гистерезисная модуляция — это метод управления током с обратной связью, при котором ток двигателя отслеживает задание. ток в диапазоне гистерезиса.На следующем рисунке показана операция
принцип гистерезисной модуляции. Контроллер генерирует
синусоидальный опорный ток требуемой величины и частоты, который
сравнивается с фактическим током в сети двигателя. Если ток превышает
верхний предел полосы гистерезиса, верхний переключатель инвертора
рука выключена, а нижний переключатель включен. Как результат,
ток начинает затухать. Если ток пересекает нижнюю границу
полосы гистерезиса поворачивают нижний переключатель плеча инвертора
выключен, а верхний переключатель включен.В результате ток становится
обратно в полосу гистерезиса. Следовательно, фактический ток принудительно
для отслеживания эталонного тока в диапазоне гистерезиса.
На следующем рисунке показана схема модуляции гистерезисного регулирования тока, состоящая из трех
гистерезисные компараторы, по одному на каждую фазу. Этот тип ШИМ с обратной связью используется в
Модели AC3 и AC5.
Модуляция пространственного вектора
техника отличается от гистерезисной модуляции тем, что
не используются отдельные компараторы для каждой из трех фаз. Вместо,
опорное напряжение пространственного вектора V сек есть
производится как единое целое, дискретизируется с фиксированной частотой, а затем создается
за счет адекватной синхронизации соседнего ненулевого пространства напряжения инвертора
векторы V 1 до V 6 и
векторы пространства нулевого напряжения В 0 , В 7 .
Упрощенная схема инвертора VSI показана ниже. На этой диаграмме
состояние проводимости трех ветвей инвертора представлено
тремя логическими переменными SA, SB и SC.Логическая 1 означает, что
Верхний переключатель является проводящим, а логический 0 означает, что нижний переключатель
проводит.
Упрощенная схема инвертора VSI PWM
На этой диаграмме показано состояние проводимости трех выводов
инвертор представлен тремя логическими переменными: SA, SB и SC.
Логическая 1 означает, что верхний переключатель включен, а логический 0 означает
что нижний переключатель включен.
Переключение SA, SB, SC приводит к восьми состояниям инвертора. Состояния переключения и
соответствующие напряжения между фазами и нейтралью приведены в таблице, в которой перечислены
состояний, операций инвертора и векторов пространственного напряжения.Шесть активных векторов:
под углом 60 градусов и описывают границу шестиугольника. Два нулевых вектора
находятся у истока.
В качестве примера для расположения вектора V s показано на схеме пространственно-векторного напряжения инвертора, способ генерации
выход инвертора должен использовать соседние векторы В 1 и V 2 на неполной ставке для удовлетворения
средний спрос на выпуск продукции.Напряжение В с может быть разрешено как:
V a и V b являются
компоненты V s вдоль V 1 и V 2 ,
соответственно. Учитывая период т c в течение
который средний результат должен соответствовать команде, напишите длительность времени
двух состояний 1 и 2 и состояния нулевого напряжения как:
Государство
SA
SB
SC
Работа инвертора
Вектор космического напряжения
0
1
1
1
Freewheeling
В 0
1
1
0
0
Активный
В 1
2
1
1
0
Активный
В 2
3
0
1
0
Активный
В 3
4
0
1
1
Активный
В 4
5
0
0
1
Активный
В 5
6
1
0
1
Активный
В 6
7
0
0
0
Freewheeling
В 7
Контроль напряжения / герц в разомкнутом контуре
Поток статора машины переменного тока равен отношению напряжения статора к частоте, потому что
где
, следовательно,
Поскольку на двигатель подается переменное напряжение и частота переменного тока, важно
поддерживать постоянное значение В / Гц в области постоянного крутящего момента, если магнитное насыщение
следует избегать. Типичная характеристика В / Гц показана ниже. Обратите внимание, что
прямая линия имеет небольшое повышение напряжения, чтобы компенсировать падение сопротивления
на низкой частоте. Управление В / Гц без обратной связи используется в приложениях с низкой динамикой, таких как
как насосы или вентиляторы, где допускается небольшое изменение скорости двигателя в зависимости от нагрузки. В
Модель AC1 основана на контроллере В / Гц без обратной связи.
Замкнутый контур управления скоростью с компенсацией скольжения
В этом типе управления команда скорости скольжения добавляется к измеренной скорости ротора для получения
желаемая частота инвертора.Регулятор скорости на основе PI производит скольжение
команда. Требуемая частота инвертора генерирует команду напряжения через В / Гц.
характеристика, подобная показанной выше. Модель AC2 основана на замкнутом контуре
регулирование скорости, использующее регулировку В / Гц и скольжение.
Flux-Oriented Control
Конструкция машины постоянного тока такова, что поток поля
перпендикулярна потоку якоря. Будучи ортогональными, эти два
потоки не производят сетевого взаимодействия друг с другом.Регулировка поля
поэтому ток может управлять потоком машины постоянного тока, а крутящий момент
можно управлять независимо от магнитного потока, регулируя якорь
текущий. Машина переменного тока не так проста из-за взаимодействия
между полями статора и ротора, ориентация которых не
удерживается под углом 90 градусов, но зависит от условий эксплуатации. Вы можете
получить характеристики машины постоянного тока при удерживании фиксированного и ортогонального
ориентация между полем и полем якоря в машине переменного тока
ориентируя ток статора относительно потока ротора так, чтобы
для достижения независимо контролируемых магнитного потока и крутящего момента.Такой контроль
Схема называется потоковым управлением или векторным управлением. Векторное управление
применимо как к асинхронным, так и к синхронным двигателям. Посмотрим
Теперь как это применимо к асинхронным двигателям.
Учитывая модель d-q индукционной машины в справочнике
рамка, вращающаяся с синхронной скоростью ω e ,
, где
Полевое управление подразумевает, что компонент i ds тока статора будет выровнено с полем ротора, а компонент i qs будет перпендикулярно i ds .Этого можно добиться, выбрав ω e на
быть скорость потока ротора и фиксации фазы ссылки
рамная система, так что поток ротора точно совпадает с
d, что дает
и
, что подразумевает, что
и
Отсюда также следует, что
Аналогия с производительностью машины постоянного тока теперь очевидна. Электрический
крутящий момент пропорционален компоненту i qs ,
тогда как соотношение между потоком φ r и
компонент i ds предоставляется
линейной передаточной функцией первого порядка с постоянной времени L r / R r .
Вы не можете напрямую измерить ориентацию потока ротора в
индукционная машина с короткозамкнутым ротором. Это можно оценить только из
терминальные измерения. Альтернативный способ — использовать отношение скольжения
полученное выше, чтобы оценить положение потока относительно ротора,
как показано. Последняя схема управления называется косвенной полевой ориентацией.
управление и используется в модели AC3.
Прямое управление крутящим моментом
Полеориентированное управление — привлекательный метод управления, но у него есть серьезный недостаток:
в значительной степени полагается на точное знание параметров двигателя.Постоянная времени ротора
особенно трудно измерить точно, и это зависит от
температура.
Более надежный метод управления состоит, во-первых, в оценке потока статора машины и электрического
крутящий момент в неподвижной системе отсчета из измерений терминала. Продолжение
используются соотношения:
Затем контролируются расчетный поток статора и электрический крутящий момент. напрямую путем сравнения их с соответствующими требуемыми значениями, используя
гистерезисные компараторы.Выходы двух компараторов затем
используются в качестве входных сигналов оптимальной таблицы переключения. Продолжение
таблица выводит соответствующее состояние переключения для инвертора.
Таблица переключения векторов пространства инвертора
S (1)
920212
S (1)
12
(3)
S (4)
S (5)
S (6)
1
1
9240 2
1
2
V 3
V 4
V 5
V
8
V
9
07
07
5
9
900
0
V 0
V 7
V 0
V 7
V 0
V 7 37
40 37
40 В 6
В 1
В 2
В 3
В 5
-1
1
В 3
В
0 4
4
0
В 6
В 1
В 2
0
В 7
В 0
92
92
0
9009 0
V 7
V 0
-1
V
V
9 9007 902 902
V 1
V 2
V 3
V
9
V
9 4202
07 Привод двигателя
В этом примере вы создаете и моделируете эту простую систему привода асинхронного двигателя:
Пример иллюстрирует использование модели AC4 мощностью 200 л.с.
Параметр асинхронного двигателя устанавливается во время регулирования крутящего момента.Блок AC4
моделирует привод DTC. В этом примере двигатель подключен к вентилятору и его
моделируется реакция на ступеньки крутящего момента.
Получите модель AC4 из библиотеки электрических приводов
Откройте новое окно и сохраните его как ac_example .
Добавить блок привода асинхронного двигателя DTC
из библиотеки>>>> в ac_example окно.
Подключите модель AC4 к источнику напряжения
Как и в примере с постоянным током, теперь вы должны подключить блок AC4 к правильному напряжению
источник:
Добавить трехфазный источник
блок из>>>> библиотеки в вашу схему. Подключите источник напряжения
выходы A, B и C на входы AC4 A, B и C соответственно.
В этом примере мы будем приводить в действие асинхронный двигатель мощностью 200 л.с. и 460 В.
номинальное напряжение якоря и номинальная частота 60 Гц.Как указано в
пример постоянного тока, необходимые значения амплитуды и частоты источника напряжения
для каждой модели привода библиотеки Electric Drives можно найти в
справочные заметки. Также указаны номинальные значения соответствующих двигателей.
включены. В таблице приведены значения, соответствующие AC4 200 л.с.
модель.
Привод
Входное напряжение
Амплитуда
460 В
Выбор и подключение шаговых двигателей
Платы Duet используют драйверы биполярных шаговых двигателей.Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в однополярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключать 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, подключенный к каждому концу. Пары провод и катушка называются фазой. 4 провода соответствуют 4 выходным контактам каждого шагового драйвера на Duet (см. Ниже для определения фаз и подключения).
В 6-проводных шаговых двигателях по-прежнему используются 2 катушки, но каждая катушка имеет центральный отвод, что позволяет при необходимости разрезать катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме полукатушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. См. Технические характеристики двигателя, чтобы убедиться, что ваш Duet может обеспечивать достаточный ток для того, как вы хотите их подключить.
8-проводный шаговый двигатель
имеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов.Вы можете запустить 8-проводный шаговый двигатель в режиме полукатушки (с подключенными только 2 катушками) или в режиме полной катушки, а в режиме полной катушки вы можете подключить катушки последовательно или параллельно. В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном итоге для подключения к Duet нам осталось всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно. Максимальный ток через одну обмотку (что действительно важно при использовании микрошага) редко указывается и будет немного выше.Однако, даже если одна обмотка приводится в действие при указанном номинальном токе, двигатель будет очень горячим. Таким образом, обычно устанавливается ток двигателя не более 85% от номинального тока. Следовательно, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендованного максимального тока шагового драйвера. Это дает:
Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 A RMS) => Номинальный ток шагового двигателя <= 1.9A
Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,4 A RMS) => Номинальный ток шагового двигателя <= 3,0 A
Duet 2 Maestro (рекомендуемый максимальный ток двигателя 1,4 A RMS с хорошим охлаждением вентилятора) => Шаговый двигатель номинальный ток <= 1,7 А. Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше.
Основная плата Duet 3 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя 4,45 A RMS) => Номинальный ток шагового двигателя <= 5.5A
Duet 3 Tooboard (рекомендуемый максимальный ток двигателя 1,4 A RMS) => Номинальный ток шагового двигателя <= 1,75 A
Это максимальный крутящий момент, который двигатель может обеспечить с обеими обмотками, запитанными на полном токе, прежде чем он начнет прыгать ступеньки. Удерживающий момент, когда одна обмотка находится под напряжением при номинальном токе, примерно в 1 / sqrt (2) раза больше. Крутящий момент пропорционален току (за исключением очень низких токов), поэтому, например, если вы установите драйверы на 85% номинального тока двигателя, то максимальный крутящий момент будет 85% * 0.707 = 60% указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он приводит. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. В свою очередь, нагрузка будет отставать от позиции, заданной прошивкой.
Иногда можно увидеть, что микрошаг уменьшает крутящий момент.На самом деле это означает, что, когда предполагается, что угол запаздывания равен углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий микрошаг подразумевает меньший угол запаздывания и, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (что действительно имеет значение) не уменьшается с увеличением микрошага. Другими словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и положение монтажных отверстий. Самый популярный размер для 3D-принтеров — Nema 17, у которого квадрат не более 42,3 мм и отверстия для крепления в квадрате со стороной 31 мм.
Nema 17 Двигатели бывают разной длины, от «блинов» длиной 20 мм до двигателей длиной 60 мм. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе.Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duets должны иметь возможность управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что является пределом для Duet 2 Maestro (хотя вы всегда можете запускать двигатели с меньшим током).
Двигатели Nema 23 обладают более высоким крутящим моментом, чем двигатели Nema 17. Duet 2 (Wi-Fi и Ethernet) может управлять ими, если вы внимательно их выбираете, особенно в отношении номинального тока, до максимум около 2,8 А. Duet 3 должен иметь возможность управлять более крупными двигателями, до 5.5А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более крупных двигателей.
Nema 34 Двигатели еще больше, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3. Можно модифицировать Duet 3, увеличив его до 48 В и, возможно, до 60 В (что является пределом для шагового драйвера), хотя это аннулирует вашу гарантию; см. https: // форум.duet3d.com/post/133293
Есть два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам / оборот. В большинстве 3D-принтеров используются двигатели 1,8 градуса на шаг.
Не считая очевидной разницы в угле шага:
Двигатели 0,9 градуса имеют немного более низкий удерживающий момент, чем аналогичные двигатели 1,8 градуса от того же производителя. .8градусный мотор. Или, другими словами, при малых углах запаздывания двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки.
При заданной скорости вращения двигатель 0,9 градуса производит вдвое большую индуктивную обратную ЭДС, чем двигатель 1,8 градуса. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
Двигатели с 0,9 градусом нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать ступенчатые импульсы.Для решения этой проблемы можно использовать режим интерполяции с микрошагом 16x драйверов TMC2660 на Duet 2 WiFi / Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут интерполировать при любой настройке микрошага.
Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем, прежде чем крутящий момент упадет. Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже), а номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное количество оборотов в секунду до падения крутящего момента составит:
Пример: a 1.Двигатель 8 градусов / шаг (т.е. 200 шагов / оборот) с индуктивностью 4 мГн работает при 1,5 А с использованием источника питания 12 В, а привод ремня GT2 с шкивом с 20 зубьями начнет терять крутящий момент примерно со скоростью 250 мм / сек. Это скорость ленты, которая на принтере CoreXY или delta отличается от скорости головки.
На практике крутящий момент упадет раньше, чем это, из-за обратной ЭДС, вызванной движением, и потому, что вышеупомянутое не учитывает сопротивление обмотки. Двигатели с низкой индуктивностью также имеют низкую обратную ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с низкой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi / Ethernet составляет 25 В, для Duet 2 Maestro — 28 В, а для Duet 3 — 32 В.
Это просто сопротивление каждой фазы и падение напряжения на каждой фазе, когда двигатель неподвижен и фаза проходит свой номинальный ток (который является продуктом сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть значительно ниже напряжения питания шаговых драйверов.
При вращении шагового двигателя возникает обратная ЭДС. При идеальном нулевом угле запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и совпадает по фазе с обратной ЭДС из-за индуктивности. Когда двигатель развивает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратная ЭДС из-за вращения обычно не указывается в технических данных, но мы можем оценить ее по следующей формуле:
Формула предполагает, что удерживающий момент задан для обеих фаз с номинальным током, запитанными.Если указан только одна фаза под напряжением, замените sqrt (2) на 2.
Пример: рассмотрим шаговый двигатель 200, приводящий в движение каретку через шкив с 20 зубьями и ремень GT2. Это движение 40 мм на оборот. Для достижения скорости 200 мм / сек нам нужно 5 об / сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают на 1,68 А, пиковая обратная ЭДС из-за вращения будет 1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал обратную ЭДС для двух типов двигателей:
17HS19-1684S: измерено 24 В, рассчитано 24.24 В при условии, что удерживающий крутящий момент указан с обеими фазами при номинальном токе.
JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В с учетом удерживающего момента 0,22 Нм при подаче питания на обе фазы при номинальном токе. Возможно, удерживающий момент для этого двигателя указан только для одной фазы под напряжением, и в этом случае расчетное значение станет 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другом техническом описании как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
Если у вас есть целевая скорость движения для вашего принтера, вы можете определить, по крайней мере, приблизительно, какое напряжение питания вам понадобится для драйверов двигателей. Вот как на примере расчета:
Определитесь со своей целевой скоростью движения. В этом примере я буду использовать 200 мм / сек.
Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудший случай — это движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение около края станины, а наихудшая скорость ленты — это скорость движения, деленная на тангенс угла (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость перемещения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ремня составляет 200 / тангенс (30 градусов) = 346 мм / сек.
Определите количество оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
Вычислить пиковую обратную ЭДС, обусловленную индуктивностью. Это обороты_за_секунду * пи * мотор_ток * мотор_индуктивность * N / 2, где N — количество полных шагов на оборот (так 200 для 1.Двигатели 8deg или 400 для двигателей 0.9deg). Мои моторы 0,9 градуса с индуктивностью 4,1 мГн, и я обычно использую их при 1 А. Таким образом, обратная ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
Рассчитайте примерную обратную ЭДС из-за вращения. Из приведенной ранее формулы это sqrt (2) * pi * Rated_holding_torque * revs_per_second / Rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат будет 1,414 * 3,142 * 0,44 * 8,7 / 1,68 = 10,1 В
Желательно, чтобы напряжение питания драйвера было как минимум суммой этих двух обратных ЭДС. , плюс еще несколько вольт.Если у вас два двигателя, подключенных последовательно, то необходимое напряжение увеличивается вдвое.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-перемещения со скоростью движения 200 мм / сек, если я использую 24 В. тогда мощность составляет более 2/3 теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен уменьшаться более чем примерно на 1/3 доступного обычного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно — это объясняет, почему я смог достичь только 150 мм / сек, прежде чем я обновил принтер до 24 В.
На https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т.е. вычислить скорость, с которой начинает падать крутящий момент).
Если вы не будете использовать внешние драйверы шагового двигателя, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0.6 и Duet 0.8.5, 3 А для Duet 2, 7 А для Duet 3 основного и платы расширения и 1,7 А для панелей инструментов Duet 3 или Duet 2 Maestro.
Запланируйте работу каждого шагового двигателя на уровне от 50% до 85% его номинального тока.
Размер: Nema 17 — самый популярный размер, используемый в 3D-принтерах. Nema 14 — это альтернатива экструдеру с высоким редуктором. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может приводить в движение моторы Nema 34.
Избегайте двигателей с номинальным напряжением (или произведением номинального тока и фазного сопротивления)> 4 В или индуктивностью> 4 мГн.
Выберите 0,9 град. / Шаговые двигатели, если вам нужна дополнительная точность позиционирования, например для башенных двигателей дельта-принтера.В противном случае выберите двигатели 1,8 град / шаг.
Если вы используете какие-либо двигатели с шагом 0,9 градуса / шаг или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
При использовании экструдера с высоким редуктором (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя на червячный редуктор), используйте короткий маломощный двигатель 1,8 град / шаг / шаг для его привода.
Номера дисков, используемые в G-коде, соответствуют следующим меткам драйверов на плате (ах):
Номер привода
Duet 3 этикетка платы
Duet 2 WiFi / Ethernet этикетка платы
Duet 2 Maestro этикетка платы
0
DRIVER_0
X
DRIVER
X
Y
2
DRIVER_2
ZA ZB (два соединенных последовательно соединенных разъема)
Чтобы увидеть точное расположение контактов, проверьте электрические схемы здесь:
Схема подключения
Duet 3
Схема подключения
Duet 2 WiFi / Ethernet
Схема подключения
Duet 2 Maestro
Duet 3 имеет 6 встроенных шаговых драйверов.Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных драйверов шагового двигателя.
Чтобы подключить шаговые двигатели к внутренним драйверам, см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi / Ethernet или электрическую схему Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как и у другой популярной электроники 3D-принтера.
Для ВСЕХ ДУЭТОВ вы должны подсоединить два провода для одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода для другой фазы — к двум контактам на другом конце. См. Следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. На Duet 2 WiFi / Ethernet они помечены как «2B 2A 1A 1B» на задней стороне платы и на схеме подключения. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
На Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены как «B1 B2 A1 A2» на задней стороне платы и на схеме подключения.«A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Осторожно! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению шагового драйвера. Поэтому убедитесь, что вы знаете, какие пары проводов принадлежат одной фазе. Неважно, какую фазу вы подключаете к какой паре контактов или в каком направлении вы подключаете каждую фазу: поменять местами две фазы или поменять местами пару проводов в фазе просто заставит двигатель повернуться в другую сторону, что вы можно поправить в конфиге.g файл.
Будьте особенно осторожны при использовании шаговых двигателей со съемным кабелем! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные выводы этого разъема. Всегда проверяйте фазы шагового двигателя (см. Следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлить корпуса шаговых двигателей , особенно в принтерах с ременным приводом.В противном случае движение ремней вызовет накопление статического заряда, который в конечном итоге переместится на обмотки. Движение нити в экструдерах также может вызвать накопление статического заряда на приводном двигателе экструдера. Если моторы привинчены к металлической раме, достаточно заземления рамы.
Вот два способа разделить провода шагового двигателя на фазы:
Используйте мультиметр. Между двумя проводами, принадлежащими одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими к разным фазам, не должно быть непрерывности.
Когда провода двигателя ни к чему не подключены, вращайте шпиндель между пальцами. Замкните два провода вместе, затем снова закрутите шпиндель. Если вращать намного сложнее, чем раньше, эти два провода принадлежат одной фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Если у вас два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы подключены последовательно, что лучше, чем подключение их параллельно для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас только один шаговый двигатель Z, подключите его к разъему ZA и вставьте две перемычки в разъем ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRaps (то есть с номинальным током в диапазоне от 1,2 до 2,0 А), лучше соединять их последовательно, чем параллельно. Google «Последовательное подключение шаговых двигателей», чтобы узнать, как это сделать, например:
http: // www.Instructables.com/id/Wiring-Y …]
Некоторые недавние комплекты китайских 3D-принтеров имеют слаботочные шаговые двигатели Z, которые вместо этого предназначены для параллельного подключения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. Http: //reprap.org/wiki/G-code#M584: _Set _…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или новее.
Трехфазные двигатели, агрегат 33 — Скачать бесплатно PDF
Основы моторики.Двигатель постоянного тока
Основные принципы работы двигателя Прежде чем мы сможем исследовать функцию привода, мы должны понять основные принципы работы двигателя. Он используется для преобразования электрической энергии, подаваемой контроллером, в механическую
.
Подробнее
Теория асинхронного двигателя
Курс PDHonline E176 (3 PDH) Инструктор по теории асинхронных двигателей: Джерри Р.Беднарчик, П. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Телефон и факс: 703-988-0088 www.pdhonline.org
Подробнее
Генераторы переменного тока и двигатели
Курс по генераторам и двигателям переменного тока №: E03-008 Кредит: 3 PDH A. Bhatia Continuing Education and Development, Inc. 9 Greyridge Farm Court Stony Point, NY 10980 P: (877) 322-5800 F: (877) 322-4774 info @ cedengineering.com
Подробнее
Лаборатория 14: Трехфазный генератор переменного тока.
Лаборатория 14: Трехфазный генератор переменного тока. Цель: получить кривую насыщения генератора без нагрузки; для определения характеристики регулирования напряжения генератора с резистивной, емкостной и индуктивной
Подробнее
СИНХРОННЫЕ МАШИНЫ
СИНХРОННЫЕ МАШИНЫ Геометрия синхронной машины очень похожа на геометрию индукционной машины. Сердечник статора и обмотки трехфазной синхронной машины практически идентичны
Подробнее
Понимание генератора переменного тока
http: // www.autoshop101.com ЭТА АВТОМОБИЛЬНАЯ СЕРИЯ ГЕНЕРАТОРОВ РАЗРАБОТАНА КЕВИНОМ Р. СУЛЛИВАНОМ ПРОФЕССОРОМ АВТОМОБИЛЬНЫХ ТЕХНОЛОГИЙ В SKYLINE COLLEGE SAN BRUNO, КАЛИФОРНИЯ ВСЕ ПРАВА ЗАЩИЩЕНЫ
Подробнее
Цепи трехфазного переменного тока
Трехфазные цепи переменного тока Этот рабочий лист и все связанные файлы находятся под лицензией Creative Commons Attribution License, версия 1.0. Чтобы просмотреть копию этой лицензии, посетите http: // creativecommons.org / licenses / by / 1.0 /,
Подробнее
Основы электричества
Основы теории электрогенераторов Государство и члены PJM Департамент обучения PJM 2014 8/6/2013 Цели Студент сможет: Описать процесс электромагнитной индукции. Определить основные компоненты.
Подробнее
ГЕНЕРАТОРЫ ПРЯМОГО ТОКА
ГЕНЕРАТОРЫ ПРЯМОГО ТОКА Редакция 12:50 14 ноя 05 ВВЕДЕНИЕ Генератор — это машина, которая преобразует механическую энергию в электрическую, используя принцип магнитной индукции.Этот принцип
Подробнее
Индуктивность. Моторы. Генераторы
Индуктивные двигатели Генераторы Самоиндукция Самоиндукция возникает, когда изменяющийся поток через цепь возникает из самой цепи. По мере увеличения тока магнитный поток через петлю из-за
СИНХРОННЫЕ МАШИНЫ Tze-Fun Chan Гонконгский политехнический университет, Гонконг, Китай Ключевые слова: синхронный генератор, синхронный двигатель, автоматический регулятор напряжения, V-образные кривые, синхронизирующая мощность, охота,
Подробнее
Трехфазный асинхронный двигатель
ЭКСПЕРИМЕНТ Асинхронный двигатель Трехфазные асинхронные двигатели 208 В LL ЦЕЛЬ Этот эксперимент демонстрирует работу асинхронных двигателей с короткозамкнутым ротором и метод получения электрического эквивалента
Подробнее
Поворотные фазовые преобразователи
ФАКТЫ от Ronk Electrical Industries, Inc.Бюллетень 11981 Поворотные фазовые преобразователи РОТОВЕРТЕР Пат. № 3,670,238 ROTO-CON Пат. № 4 158 225 Что такое силовые преобразователи ROTO-CON и ROTOVERTER? ROTO-CON
Подробнее
ГЕНЕРАТОРЫ СУДОВОГО ОБСЛУЖИВАНИЯ (AC)
ГЛАВА 14 СУДОВЫЕ ГЕНЕРАТОРЫ (AC) ВВЕДЕНИЕ Все генераторы преобразуют механическую энергию в электрическую. Это самый простой способ передачи энергии на расстояние. Топливо используется для работы
Подробнее
C Стандартные двигатели переменного тока
C Стандартный AC Стандартный AC C-1 Обзор, серия продуктов… C-2 Постоянный … C-9 C-21 C-113 Реверсивный C-147 Обзор, серия продуктов Реверсивный электромагнитный тормоз постоянного действия C-155 Электромагнитный тормоз
Подробнее
8022-0E Комплект обмотки двигателя
8022-0E Комплект для обмотки двигателя LabVolt Series Datasheet Festo Didactic en 220 V — 60 Hz 06/2016 Содержание Общее описание 2 Дополнительное оборудование, необходимое для работы вращающихся машин 3 Характеристики
Подробнее
ТЕХНОЛОГИЯ ВЕТРОВОЙ ТУРБИНЫ
Модуль 2.2-2 ТЕХНОЛОГИЯ ВЕТРОВОЙ ТУРБИНЫ Электрическая система Герхард Дж. Гердес Семинар по возобновляемым источникам энергии 14-25 ноября 2005 г. Нади, Республика острова Фиджи Содержание Модуль 2.2 Типы генераторных систем
Подробнее
Возвращение к расчетам трехфазного переменного тока
AN110 Dataforth Corporation Страница 1 из 6 ЗНАЕТЕ ЛИ ВЫ? Никола Тесла (1856-1943) приехал в США в 1884 году из Югосиавии. Он прибыл во время битвы течений между Томасом Эдисоном, который
Подробнее
НАЦИОНАЛЬНЫЙ СЕРТИФИКАТ (ПРОФЕССИОНАЛЬНЫЙ)
НАЦИОНАЛЬНЫЙ СЕРТИФИКАТ (ПРОФЕССИОНАЛЬНЫЙ) ПРЕДМЕТ РУКОВОДСТВА ПРИНЦИПЫ И ПРАКТИКА ЭЛЕКТРОПРИВОДА NQF Уровень 4 Сентябрь 2007 г. ЭЛЕКТРИЧЕСКИЕ ПРИНЦИПЫ И ПРАКТИКА УРОВЕНЬ 4 СОДЕРЖАНИЕ ВВЕДЕНИЕ 1 ПРОДОЛЖИТЕЛЬНОСТЬ И ОБУЧЕНИЕ
Подробнее
ИНДУКЦИОННЫЙ РЕГУЛЯТОР.Задача:
ИНДУКЦИОННЫЙ РЕГУЛЯТОР Цель: Используя асинхронный двигатель с фазным ротором и индукционный регулятор, изучить влияние положения ротора на выходное напряжение регулятора. Также изучите его поведение под нагрузкой
Подробнее
ПРИВОД ПЕРЕМЕННОГО ТОКА С ЧАСТОТНЫМ УПРАВЛЕНИЕМ
ПРИВОД ПЕРЕМЕННОГО ТОКА 1.0 С ЧАСТОТНЫМ УПРАВЛЕНИЕМ Характеристики стандартных двигателей переменного тока Асинхронный двигатель с короткозамкнутым ротором — это тип электродвигателя, наиболее широко используемый в промышленности.Эта лидирующая позиция приводит в основном к
Подробнее
Рабочий лист EET272, неделя 8
EET272 Рабочий лист 8-й недели ответьте на вопросы 1-5 в рамках подготовки к обсуждению викторины в понедельник. Завершите остальные вопросы для обсуждения в классе в среду. Вопрос 1 Вопросы Сейчас мы будем
Подробнее
Промышленное управление SIRIUS Controls
Промышленные элементы управления SIRIS Controls Переключение со звезды на треугольник (звезда-треугольник) трехфазных асинхронных двигателей Снижение пикового тока переходных процессов с использованием предпочтительной конфигурации схемы для вращения по часовой стрелке и против часовой стрелки
Подробнее
СБАЛАНСИРОВАННЫЕ ТРЕХФАЗНЫЕ ЦЕПИ
СБАЛАНСИРОВАННЫЕ ТРЕХФАЗНЫЕ ЦЕПИ Напряжения в трехфазной системе питания вырабатываются синхронным генератором (Глава 6).В сбалансированной системе каждое из трех мгновенных напряжений равно
Подробнее
Рабочий лист EET272, неделя 9
Рабочий лист EET272 Неделя 9 ответьте на вопросы 1–5 в рамках подготовки к обсуждению викторины в понедельник. Завершите остальные вопросы для обсуждения в классе в среду. Вопрос 1 Вопросы AC становятся
Подробнее
Номинальные параметры контактора и пускателя
Номинальные характеристики контакторов и пускателей Контакторы и пускатели двигателей имеют номинальные характеристики в зависимости от размера и типа нагрузки, на которую они рассчитаны.Национальная ассоциация производителей электрооборудования (NEMA) и Международная организация
Подробнее
Цепи трехфазного переменного тока
Электричество и новая энергия Трехфазные цепи переменного тока Пособие для учащихся 86360-F0 Номер заказа: 86360-00 Уровень редакции: 10/2014 Персоналом Festo Didactic Festo Didactic Ltée / Ltd, Квебек, Канада 2010
Подробнее
% PDF-1.3
%
670 0 объект
>
endobj
xref
670 103
0000000016 00000 н.
0000002430 00000 н.
0000002643 00000 п.
0000002784 00000 н.
0000002815 00000 н.
0000002872 00000 н.
0000003625 00000 н.
0000003880 00000 н.
0000003947 00000 н.
0000004086 00000 н.
0000004192 00000 п.
0000004348 00000 п.
0000004408 00000 п.
0000004529 00000 н.
0000004709 00000 н.
0000004875 00000 н.
0000004992 00000 н.
0000005104 00000 п.
0000005229 00000 п.
0000005382 00000 п.
0000005477 00000 н.
0000005635 00000 н.
0000005737 00000 п.
0000005869 00000 н.
0000006012 00000 н.
0000006161 00000 п.
0000006294 00000 н.
0000006434 00000 н.
0000006575 00000 н.
0000006694 00000 н.
0000006806 00000 н.
0000006936 00000 п.
0000007101 00000 п.
0000007206 00000 н.
0000007340 00000 н.
0000007447 00000 н.
0000007593 00000 н.
0000007787 00000 н.
0000007885 00000 н.
0000008026 00000 н.
0000008190 00000 п.
0000008319 00000 н.
0000008476 00000 н.
0000008584 00000 н.
0000008681 00000 н.
0000008778 00000 н.
0000008898 00000 н.
0000008993 00000 н.
0000009089 00000 н.
0000009182 00000 н.
0000009275 00000 н.
0000009369 00000 п.
0000009463 00000 п.
0000009557 00000 н.
0000009651 00000 п.
0000009745 00000 н.
0000009839 00000 п.
0000009933 00000 н.
0000010027 00000 п.
0000010121 00000 п.
0000010215 00000 п.
0000010309 00000 п.
0000010404 00000 п.
0000010498 00000 п.
0000010593 00000 п.
0000010772 00000 п.
0000010972 00000 п.
0000012059 00000 п.
0000013162 00000 п.
0000013355 00000 п.
0000013644 00000 п.
0000013875 00000 п.
0000013940 00000 п.
0000014166 00000 п.
0000016036 00000 п.
0000016246 00000 п.
0000017337 00000 п.
0000017728 00000 п.
0000017974 00000 п.
0000018342 00000 п.
0000018365 00000 п.
0000018575 00000 п.
0000019670 00000 п.
0000020351 00000 п.
0000021500 00000 н.
0000021522 00000 п.
0000022580 00000 п.
0000022603 00000 п.
0000023725 00000 п.
0000023748 00000 п.
0000024881 00000 п.
0000024903 00000 п.





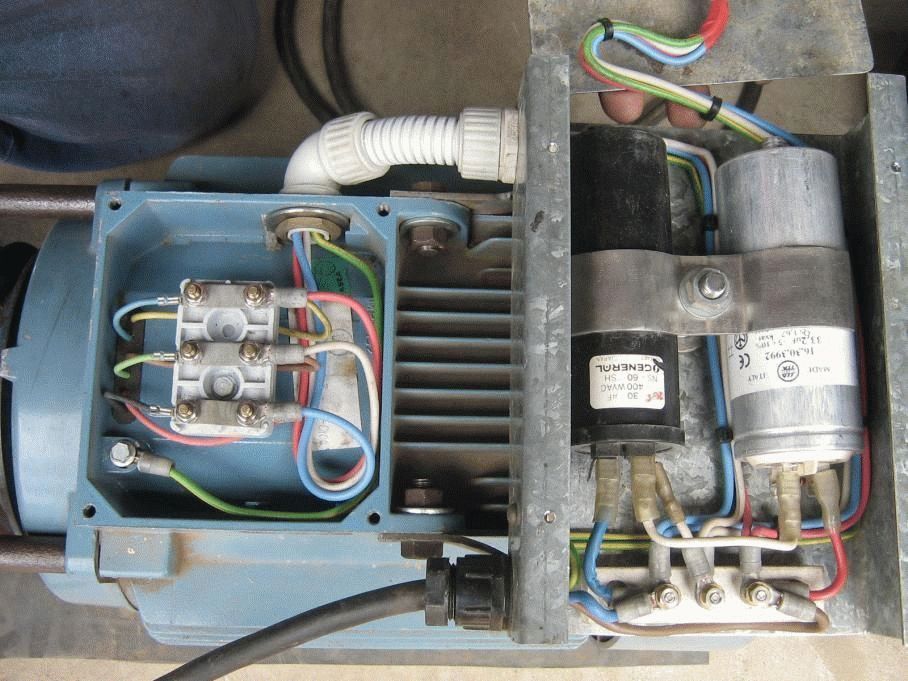
 В таком случае изменить схему соединения обмоток попросту невозможно.
В таком случае изменить схему соединения обмоток попросту невозможно.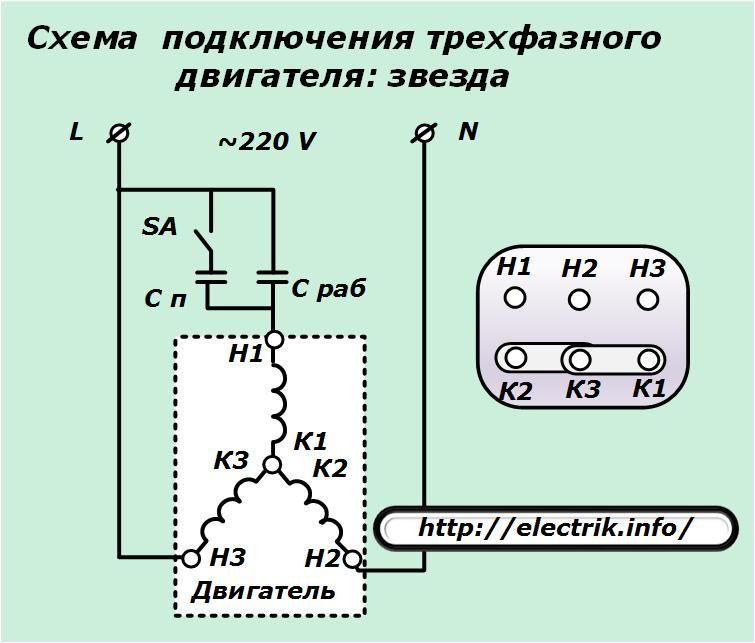 Здесь каждая обмотка используется на свое рабочее напряжение, отсюда и мощность. Схема подключения такого электродвигателя изображено на рисунке 1.
Здесь каждая обмотка используется на свое рабочее напряжение, отсюда и мощность. Схема подключения такого электродвигателя изображено на рисунке 1.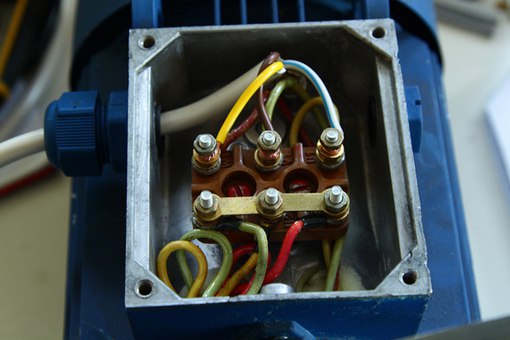 Например, если двигатель 1 кВт, то рассчитываем так: 7 * 10 = 70 мкФ. Такую емкость в одной банке найти крайне трудно, да и дорого. Поэтому чаще всего емкости соединяют в параллель, набирая нужную емкость.
Например, если двигатель 1 кВт, то рассчитываем так: 7 * 10 = 70 мкФ. Такую емкость в одной банке найти крайне трудно, да и дорого. Поэтому чаще всего емкости соединяют в параллель, набирая нужную емкость.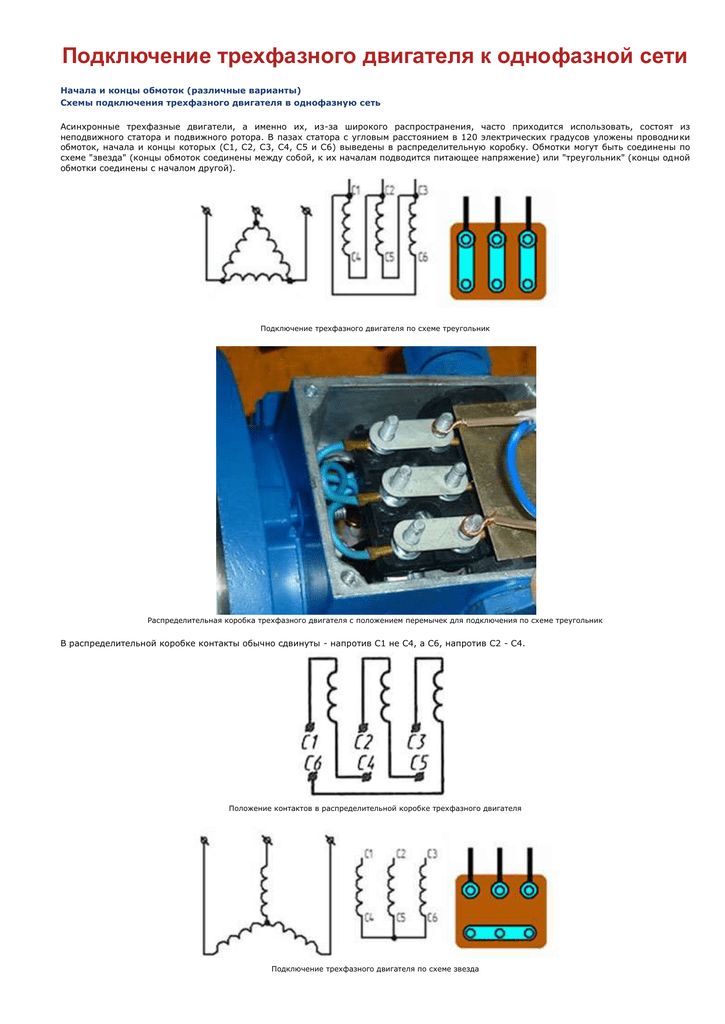
 Обсудить статью на форумеДобавить комментарий, отзыв
Обсудить статью на форумеДобавить комментарий, отзыв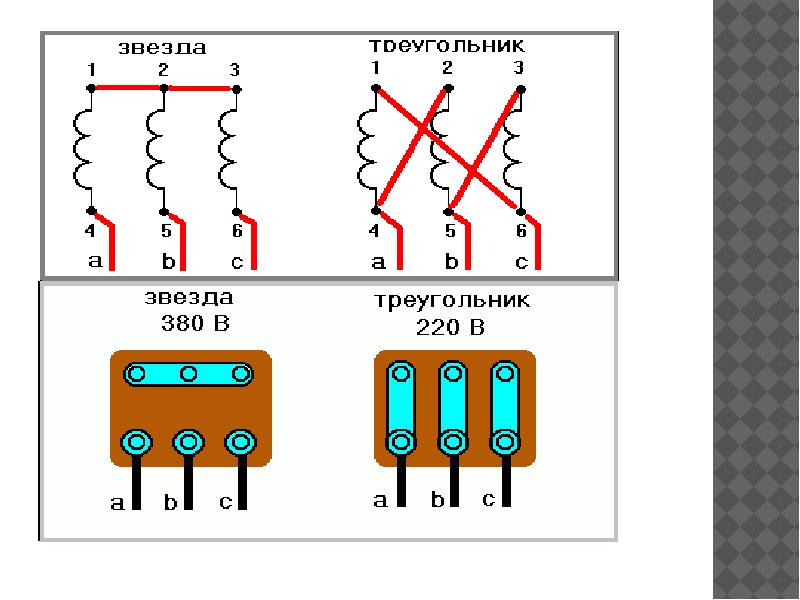
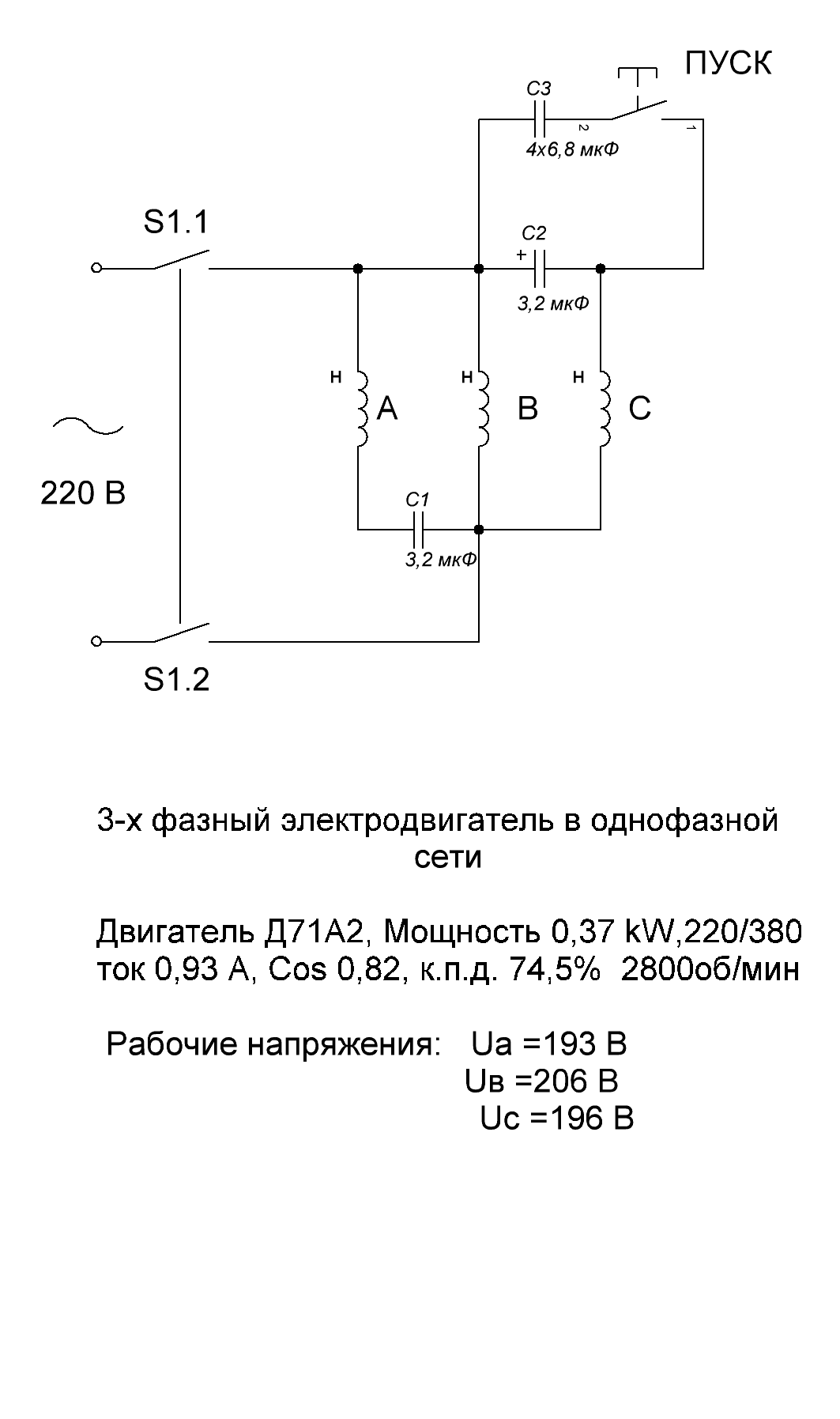 Но при необходимости эту проблему обойти можно путём использования диодного моста или двух полярных конденсаторов, объединённых в один соединением одноимённых контактов, но тут опять лучше позвать опытного электрика.
Но при необходимости эту проблему обойти можно путём использования диодного моста или двух полярных конденсаторов, объединённых в один соединением одноимённых контактов, но тут опять лучше позвать опытного электрика. Если холостой запуск происходит нормально, без перегрева и запаха гари, то рабочий конденсатор подобран, на нём и будет работать, подключайте нагрузку и продолжайте испытания уже в рабочем состоянии.
Если холостой запуск происходит нормально, без перегрева и запаха гари, то рабочий конденсатор подобран, на нём и будет работать, подключайте нагрузку и продолжайте испытания уже в рабочем состоянии.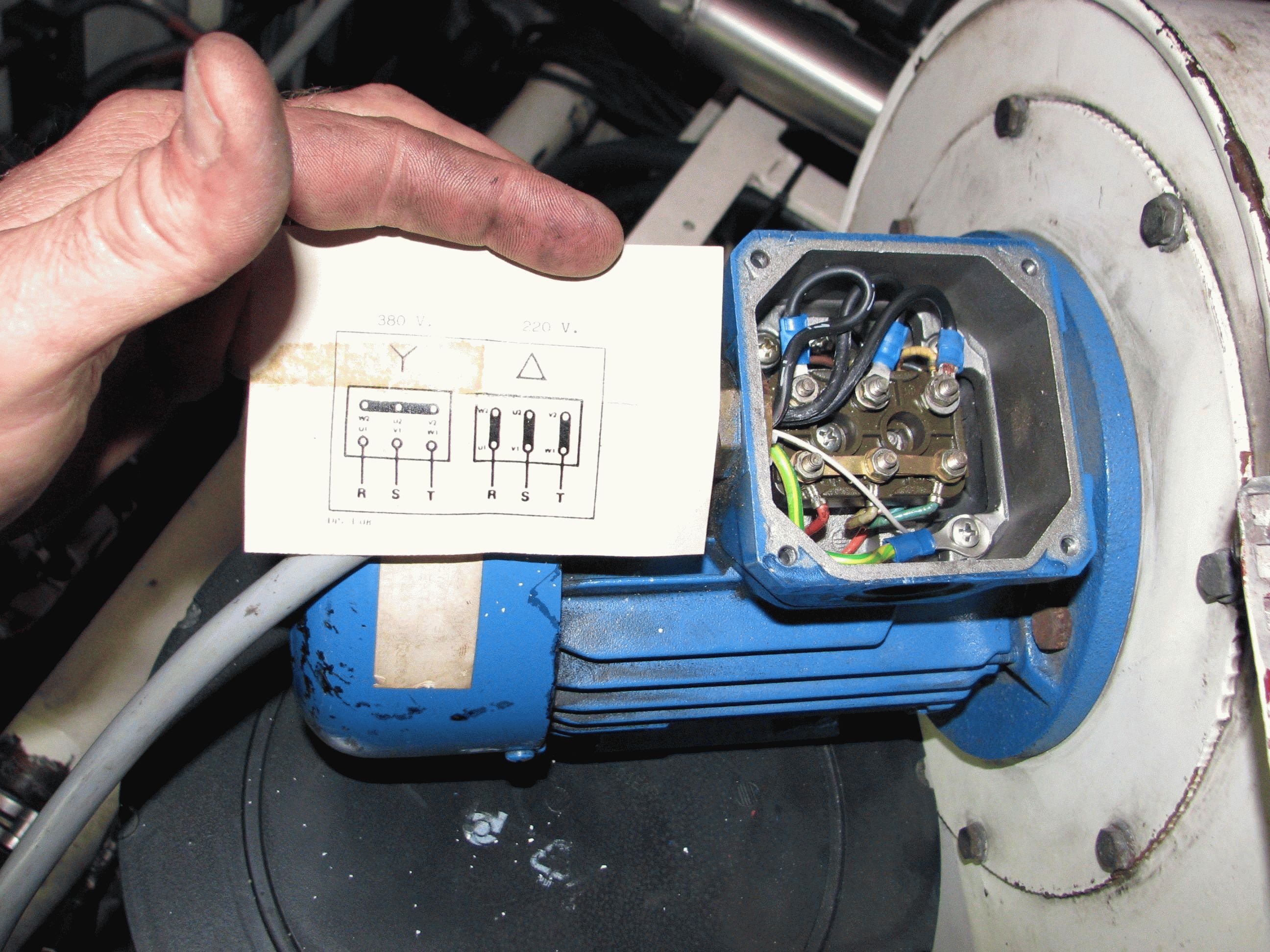
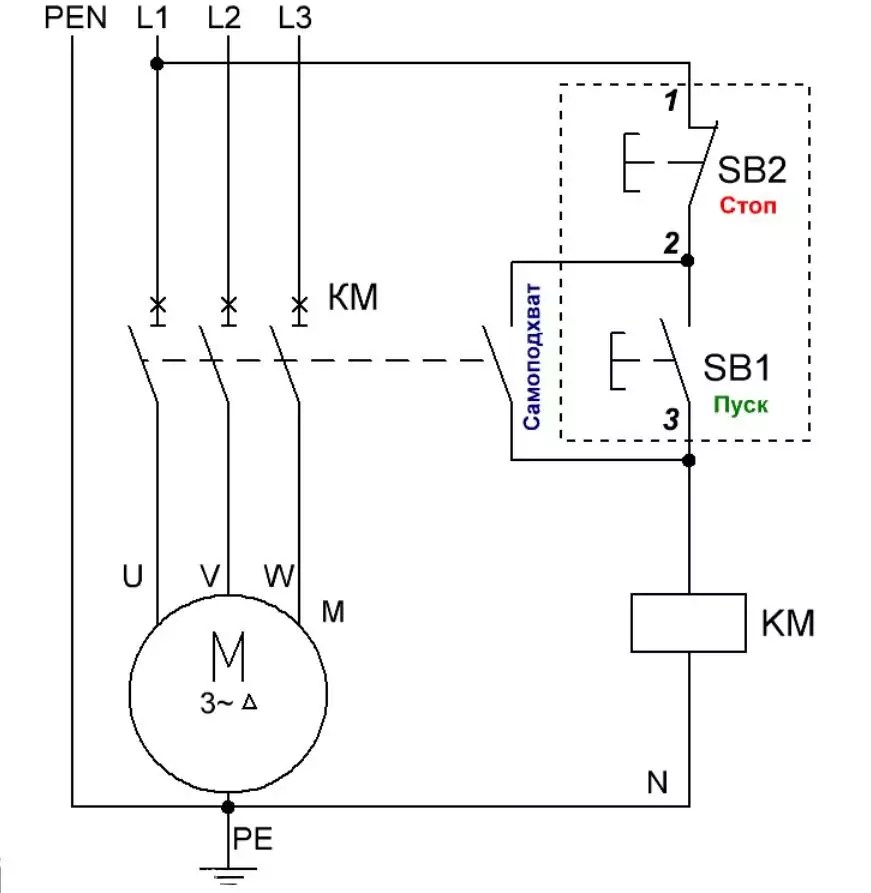 На одну клемму подаётся фаза, на другую ноль, включение конденсаторной группы производим к третьей. Теперь при подключении второго провода конденсатора к фазе мотор крутится в одну сторону, к нулю — в другую.
На одну клемму подаётся фаза, на другую ноль, включение конденсаторной группы производим к третьей. Теперь при подключении второго провода конденсатора к фазе мотор крутится в одну сторону, к нулю — в другую.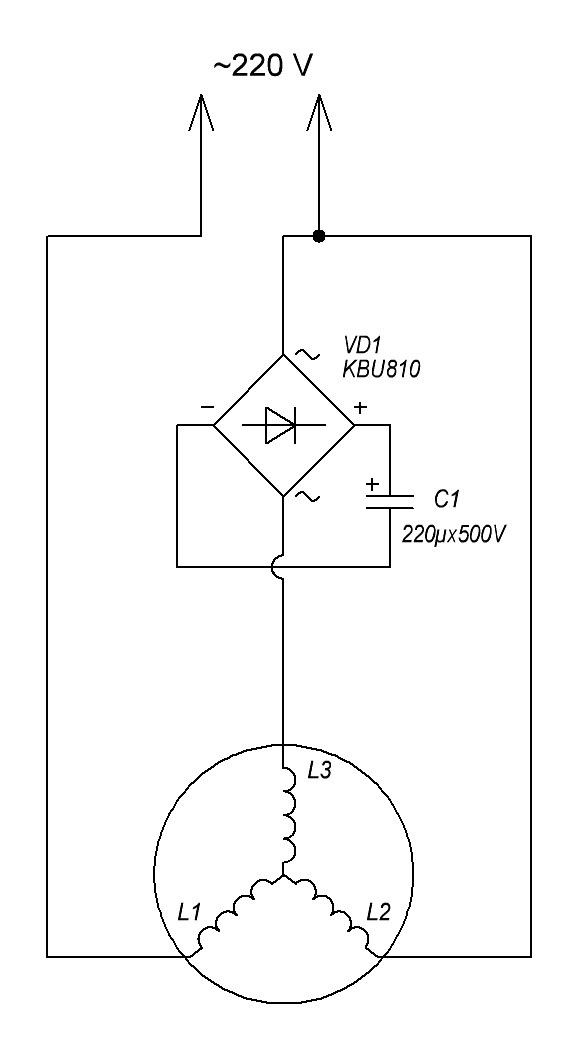 youtube.com/embed/kGOGXbL5FNk»/>
youtube.com/embed/kGOGXbL5FNk»/>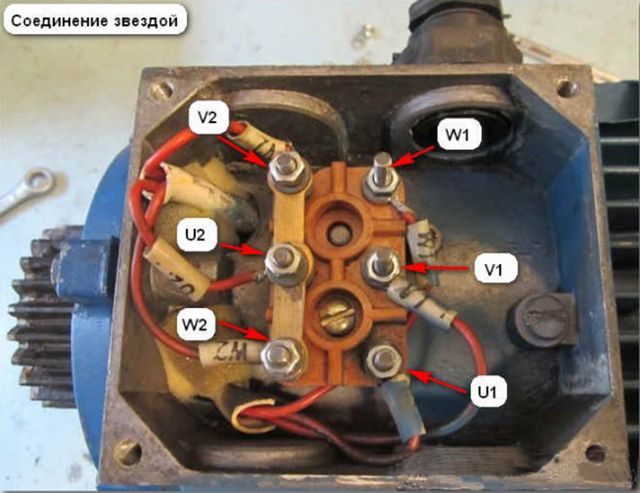 Роторы в асинхронных машинах могут быть двух видов:
Роторы в асинхронных машинах могут быть двух видов:


 Соединение по такой схеме может быть с нейтралью, которая подключается к точке соединения всех обмоток.
Соединение по такой схеме может быть с нейтралью, которая подключается к точке соединения всех обмоток.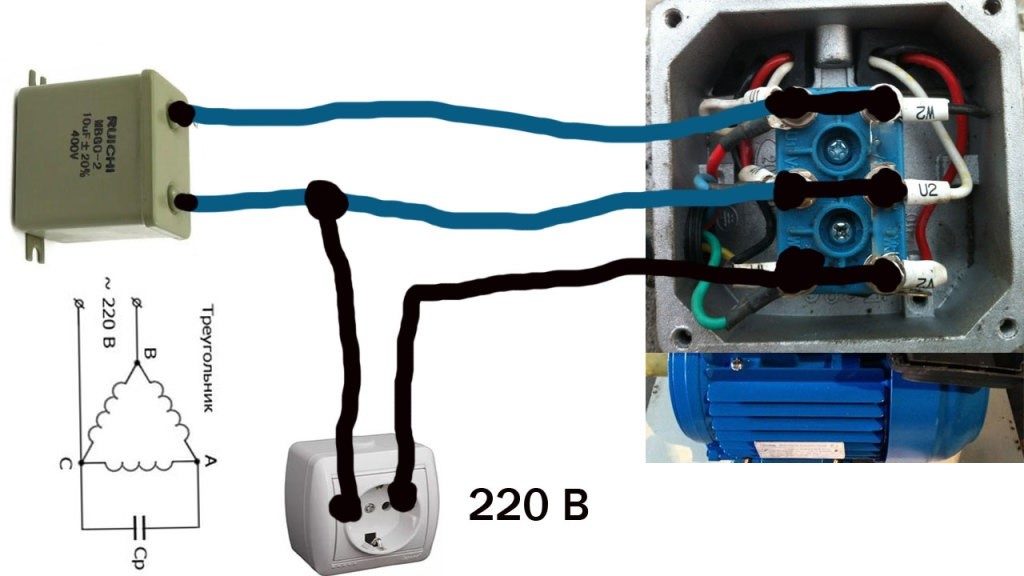 При этом конец каждой обмотки соединяют с началом последующей, что в действительности образует на принципиальной схеме треугольник.
При этом конец каждой обмотки соединяют с началом последующей, что в действительности образует на принципиальной схеме треугольник.


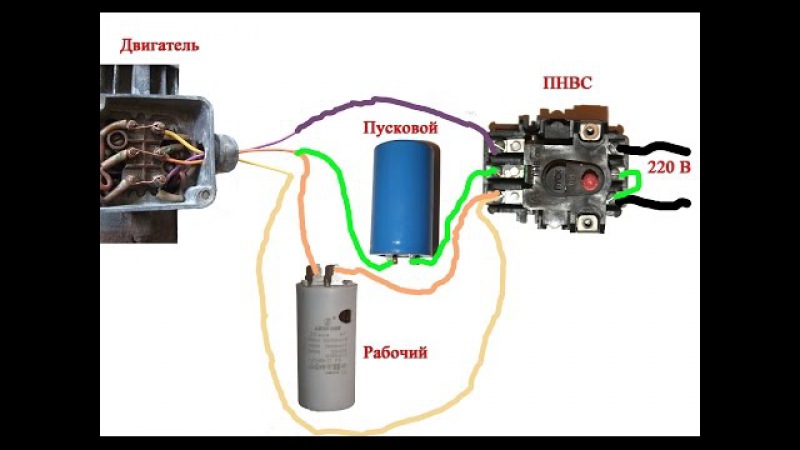 После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
 Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение.
Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение. Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.
Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.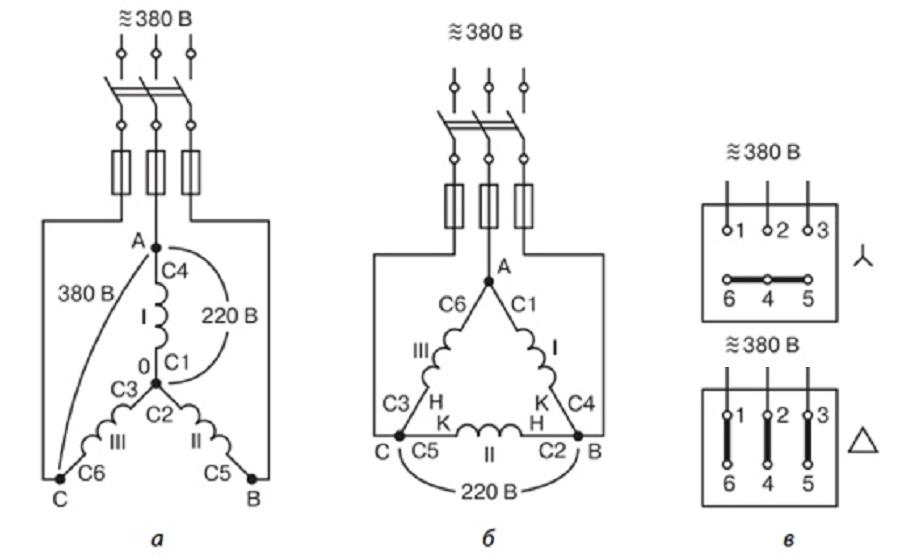
 А так на вкус и цвет, сами знаете.
А так на вкус и цвет, сами знаете. блоки в основном предназначены для активной нагрузки. Так как мотор — это индуктивная нагрузка, поэтому активный ток делим примерно на 10. Если ток активной нагрузки равен 50, то индуктивный будет 5.
блоки в основном предназначены для активной нагрузки. Так как мотор — это индуктивная нагрузка, поэтому активный ток делим примерно на 10. Если ток активной нагрузки равен 50, то индуктивный будет 5.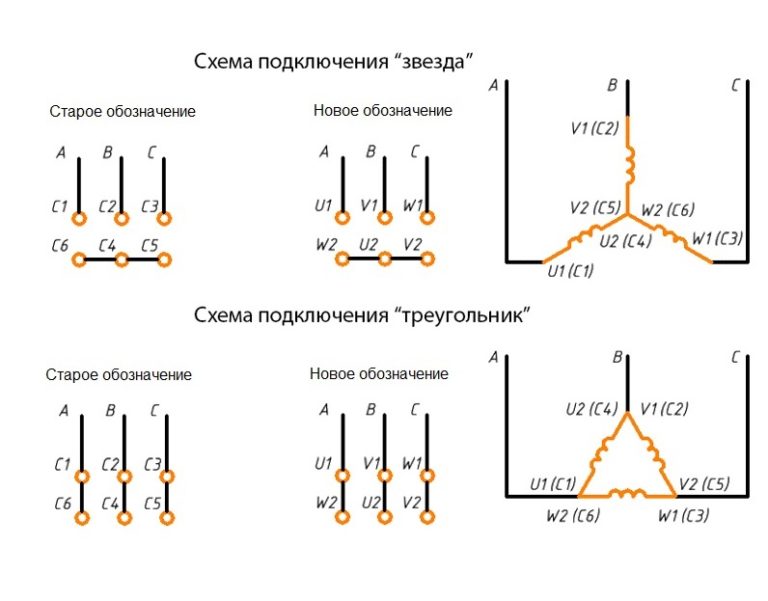 Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.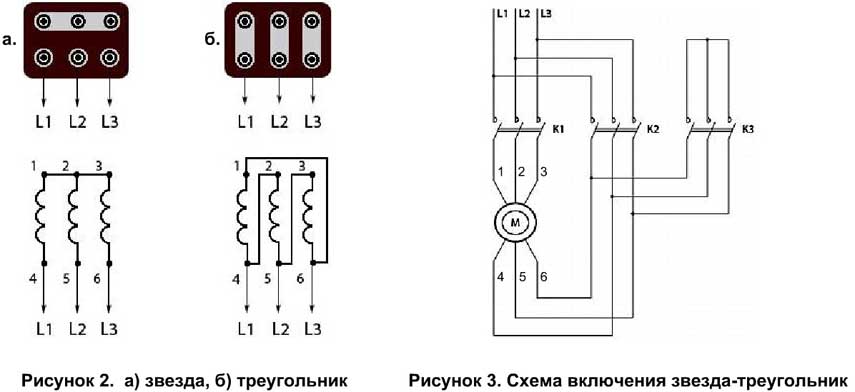 точка. Трехлинейные проводники отходят от остальных трех свободных клемм, называемых линейными проводниками .
точка. Трехлинейные проводники отходят от остальных трех свободных клемм, называемых линейными проводниками .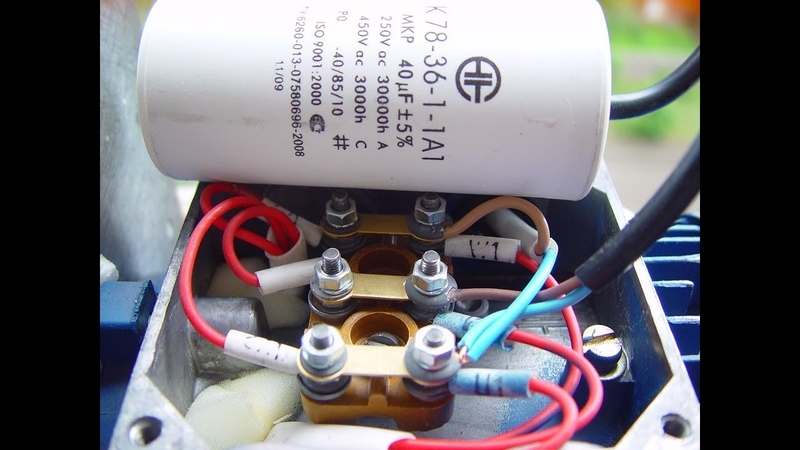 Аналогичным образом, напряжение на каждой фазе называется Phase Voltage E ph , а напряжение на двух линейных проводниках известно как Line Voltage E L .
Аналогичным образом, напряжение на каждой фазе называется Phase Voltage E ph , а напряжение на двух линейных проводниках известно как Line Voltage E L . 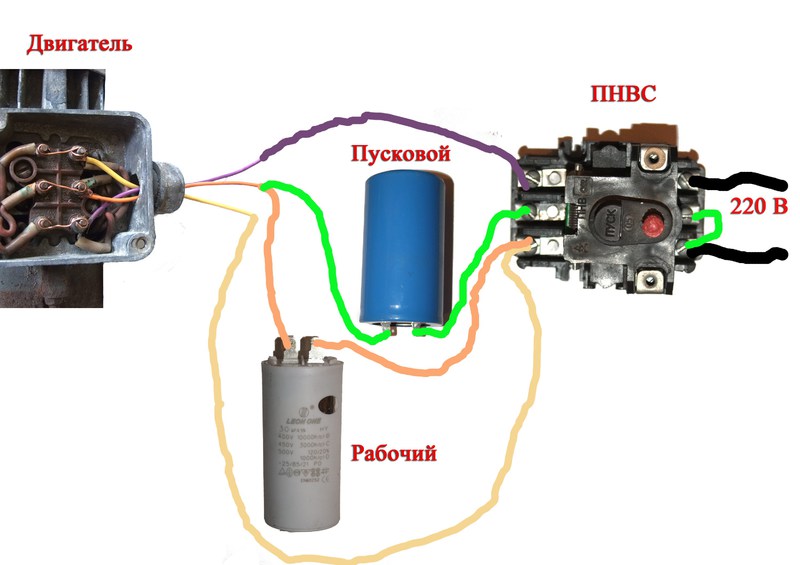
 Модели AC1, AC2, AC3 и AC4 основаны на трехфазном
Индукционный двигатель. Этот двигатель имеет трехфазную обмотку на статоре и намотанный ротор или
ротор с короткозамкнутым ротором.Ротор с короткозамкнутым ротором состоит из пазов токопроводящих стержней.
встроен в железный ротор. Проводящие шины закорочены вместе на каждом конце.
ротора токопроводящими кольцами. Модель AC5 основана на синхронном роторе с фазным ротором.
двигатель, а в модели AC6 используется синхронный двигатель с постоянными магнитами. Эти двигатели переменного тока
питается переменным напряжением переменного тока и частотой, создаваемыми инвертором. Тип инвертора
в шести моделях приводов переменного тока используется инвертор источника напряжения (VSI) в том смысле, что
этот инвертор питается постоянным напряжением постоянного тока.Это постоянное напряжение обеспечивается
неуправляемый диодный выпрямитель и конденсатор (емкостное напряжение шины постоянного тока).
Модели AC1, AC2, AC3 и AC4 основаны на трехфазном
Индукционный двигатель. Этот двигатель имеет трехфазную обмотку на статоре и намотанный ротор или
ротор с короткозамкнутым ротором.Ротор с короткозамкнутым ротором состоит из пазов токопроводящих стержней.
встроен в железный ротор. Проводящие шины закорочены вместе на каждом конце.
ротора токопроводящими кольцами. Модель AC5 основана на синхронном роторе с фазным ротором.
двигатель, а в модели AC6 используется синхронный двигатель с постоянными магнитами. Эти двигатели переменного тока
питается переменным напряжением переменного тока и частотой, создаваемыми инвертором. Тип инвертора
в шести моделях приводов переменного тока используется инвертор источника напряжения (VSI) в том смысле, что
этот инвертор питается постоянным напряжением постоянного тока.Это постоянное напряжение обеспечивается
неуправляемый диодный выпрямитель и конденсатор (емкостное напряжение шины постоянного тока).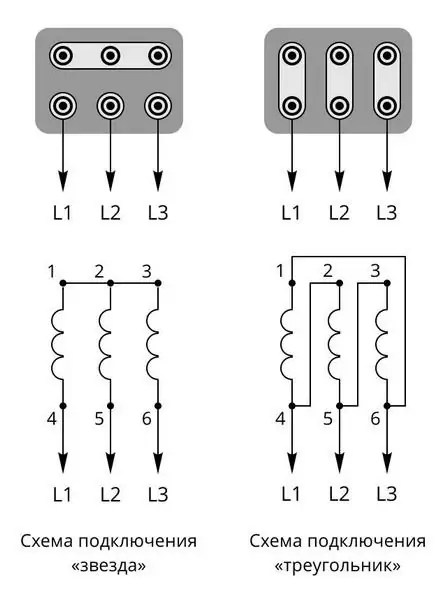
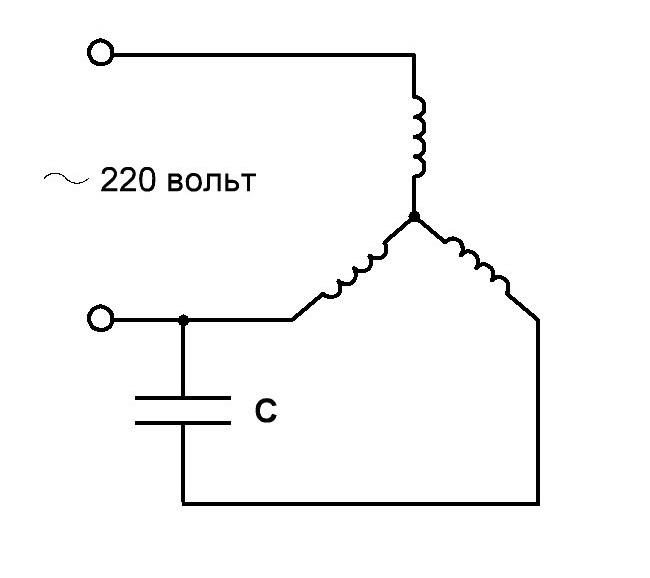 ток в диапазоне гистерезиса.На следующем рисунке показана операция
принцип гистерезисной модуляции. Контроллер генерирует
синусоидальный опорный ток требуемой величины и частоты, который
сравнивается с фактическим током в сети двигателя. Если ток превышает
верхний предел полосы гистерезиса, верхний переключатель инвертора
рука выключена, а нижний переключатель включен. Как результат,
ток начинает затухать. Если ток пересекает нижнюю границу
полосы гистерезиса поворачивают нижний переключатель плеча инвертора
выключен, а верхний переключатель включен.В результате ток становится
обратно в полосу гистерезиса. Следовательно, фактический ток принудительно
для отслеживания эталонного тока в диапазоне гистерезиса.
ток в диапазоне гистерезиса.На следующем рисунке показана операция
принцип гистерезисной модуляции. Контроллер генерирует
синусоидальный опорный ток требуемой величины и частоты, который
сравнивается с фактическим током в сети двигателя. Если ток превышает
верхний предел полосы гистерезиса, верхний переключатель инвертора
рука выключена, а нижний переключатель включен. Как результат,
ток начинает затухать. Если ток пересекает нижнюю границу
полосы гистерезиса поворачивают нижний переключатель плеча инвертора
выключен, а верхний переключатель включен.В результате ток становится
обратно в полосу гистерезиса. Следовательно, фактический ток принудительно
для отслеживания эталонного тока в диапазоне гистерезиса.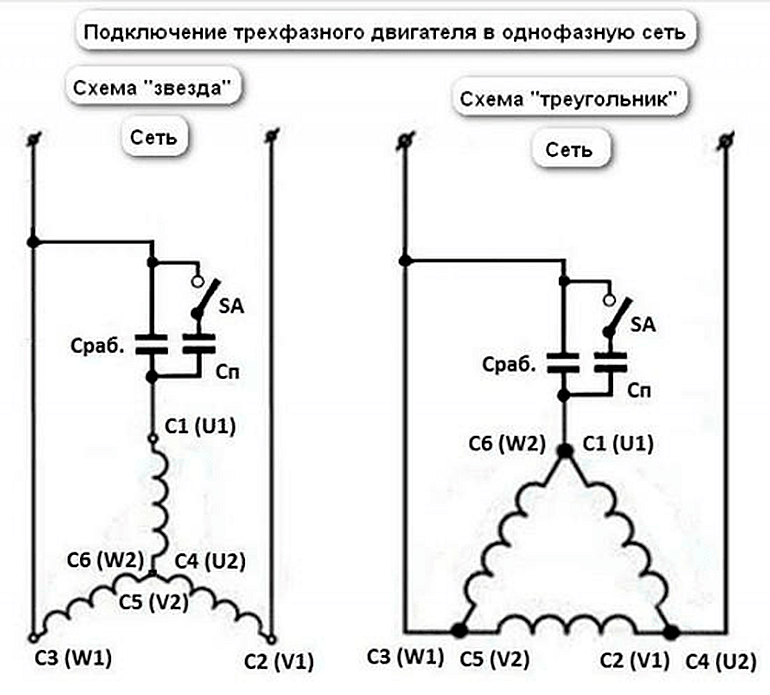 Вместо,
опорное напряжение пространственного вектора V сек есть
производится как единое целое, дискретизируется с фиксированной частотой, а затем создается
за счет адекватной синхронизации соседнего ненулевого пространства напряжения инвертора
векторы V 1 до V 6 и
векторы пространства нулевого напряжения В 0 , В 7 .
Упрощенная схема инвертора VSI показана ниже. На этой диаграмме
состояние проводимости трех ветвей инвертора представлено
тремя логическими переменными SA, SB и SC.Логическая 1 означает, что
Верхний переключатель является проводящим, а логический 0 означает, что нижний переключатель
проводит.
Вместо,
опорное напряжение пространственного вектора V сек есть
производится как единое целое, дискретизируется с фиксированной частотой, а затем создается
за счет адекватной синхронизации соседнего ненулевого пространства напряжения инвертора
векторы V 1 до V 6 и
векторы пространства нулевого напряжения В 0 , В 7 .
Упрощенная схема инвертора VSI показана ниже. На этой диаграмме
состояние проводимости трех ветвей инвертора представлено
тремя логическими переменными SA, SB и SC.Логическая 1 означает, что
Верхний переключатель является проводящим, а логический 0 означает, что нижний переключатель
проводит.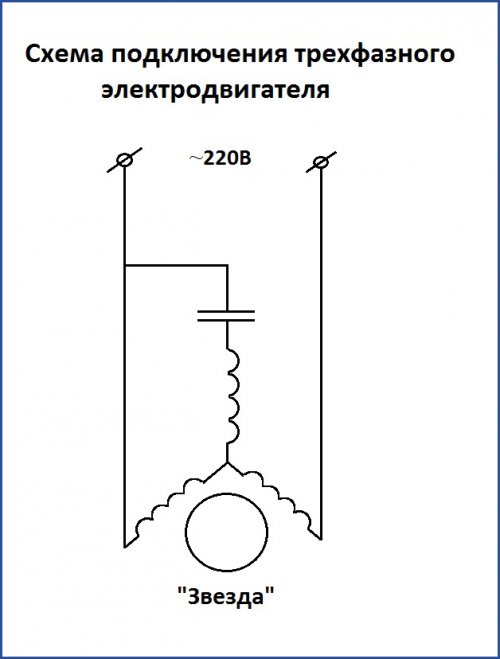
 Учитывая период т c в течение
который средний результат должен соответствовать команде, напишите длительность времени
двух состояний 1 и 2 и состояния нулевого напряжения как:
Учитывая период т c в течение
который средний результат должен соответствовать команде, напишите длительность времени
двух состояний 1 и 2 и состояния нулевого напряжения как: Типичная характеристика В / Гц показана ниже. Обратите внимание, что
прямая линия имеет небольшое повышение напряжения, чтобы компенсировать падение сопротивления
на низкой частоте. Управление В / Гц без обратной связи используется в приложениях с низкой динамикой, таких как
как насосы или вентиляторы, где допускается небольшое изменение скорости двигателя в зависимости от нагрузки. В
Модель AC1 основана на контроллере В / Гц без обратной связи.
Типичная характеристика В / Гц показана ниже. Обратите внимание, что
прямая линия имеет небольшое повышение напряжения, чтобы компенсировать падение сопротивления
на низкой частоте. Управление В / Гц без обратной связи используется в приложениях с низкой динамикой, таких как
как насосы или вентиляторы, где допускается небольшое изменение скорости двигателя в зависимости от нагрузки. В
Модель AC1 основана на контроллере В / Гц без обратной связи.
 Посмотрим
Теперь как это применимо к асинхронным двигателям.
Посмотрим
Теперь как это применимо к асинхронным двигателям.
 напрямую путем сравнения их с соответствующими требуемыми значениями, используя
гистерезисные компараторы.Выходы двух компараторов затем
используются в качестве входных сигналов оптимальной таблицы переключения. Продолжение
таблица выводит соответствующее состояние переключения для инвертора.
напрямую путем сравнения их с соответствующими требуемыми значениями, используя
гистерезисные компараторы.Выходы двух компараторов затем
используются в качестве входных сигналов оптимальной таблицы переключения. Продолжение
таблица выводит соответствующее состояние переключения для инвертора.