Однофазные и двухфазные асинхронные двигатели
Назначение, устройство и принцип действия однофазных асинхронных двигателей
Однофазные асинхронные двигатели — машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором.
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2 (рис. 1).
Магнитные оси этих фаз обмотки смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.
Рис. 1. Схема включения однофазного асинхронного двигателя с короткозамкнутым ротором.
Это поле можно представить двумя составляющими — одинаковыми круговыми магнитными полями прямой и обратной последовательностей, вращающимися с магнитными индукциями, вращающимися в противоположные стороны с одной и той же скоростью. Однако при предварительном разгоне ротора в необходимом направлении он при включенной рабочей фазе продолжает вращаться в том же направлении.
По этой причине пуск однофазного двигателя начинают с разгона ротора путем нажатия пусковой кнопки, вызывающего возбуждение токов в обеих фазах обмотки статора, которые сдвинуты по фазе на величину, зависящую от параметров фазосдвигающего устройства Z, выполненного в виде резистора, индуктивной катушки или конденсатора, и элементов электрических цепей, в которые входят рабочая и пусковая фазы обмотки статора. Эти токи побуждают в машине вращающееся магнитное поле с магнитной индукцией в воздушном зазоре, которая периодически и монотонно изменяется в пределах максимального и минимального значений, а конец ее вектора описывает эллипс.
Это. эллиптическое вращающееся магнитное поле находит в проводниках короткозамкнутой обмотки ротора ЭДС и токи, которые, взаимодействуя с этим полем, обеспечивают разгон ротора однофазного двигателя в направлении вращения поля, и он в.течение нескольких секунд достигает почти номинальной скорости.
Отпускание пусковой кнопки переводит электродвигатель с двухфазного режима на однофазный, поддерживаемый в дальнейшем соответствующей составляющей переменного магнитного поля, которая при своем вращении несколько опережает вращающийся ротор из-за скольжения.
Своевременное отключение пусковой фазы обмотки статора однофазного асинхронного двигателя от питающей сети необходимо в связи с ее конструктивным исполнением, предусматривающим кратковременный режим работы — обычно до 3 с, что исключает длительное пребывание ее под нагрузкой в связи с недопустимым перегревом, сгоранием изоляции и выходом из строя.
Повышение надежности эксплуатации однофазных асинхронных двигателей обеспечивают встраиванием в корпус машин центробежного выключателя с размыкающими контактами, присоединенными к зажимам с обозначениями ВЦ и В2, и теплового реле с аналогичными контактами, имеющими выводы с обозначениями РТ и С1 (рис.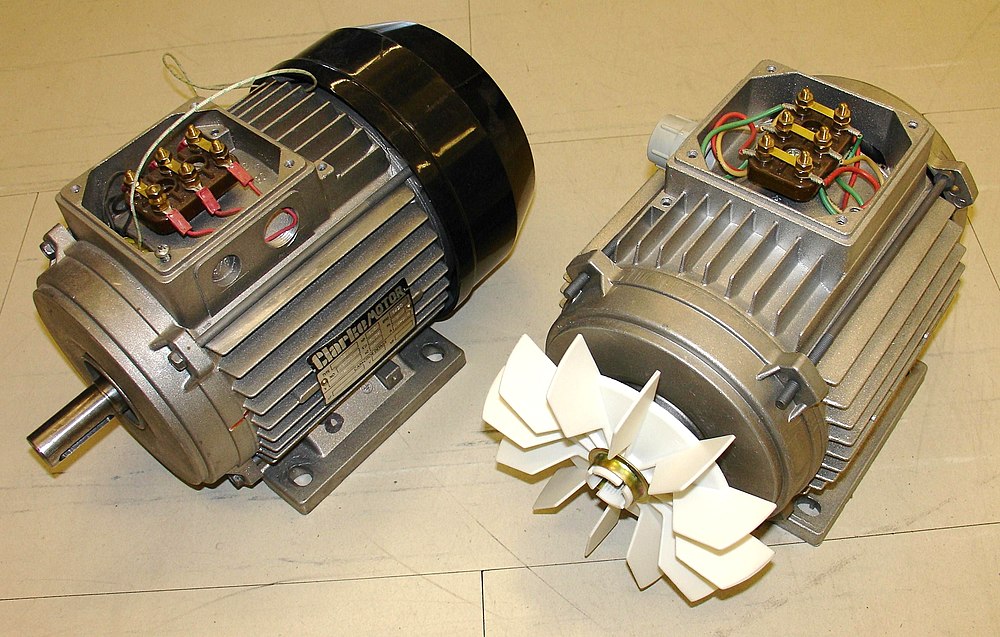
Центробежный выключатель автоматически отключает пусковую фазу обмотки статора, присоединенную к зажимам с обозначениями В1 и В2 при достижении ротором скорости, близкой к номинальной, а тепловое реле — обе фазы обмотки статора от питающей сети, когда нагрев их окажется выше допустимого.
Перемена направления вращения ротора достигается изменением направления тока в одной из фаз обмотки статора при пуске путем переключения пусковой кнопки и перестановки металлической пластины на зажимах электродвигателя (рис. 2, а, б) или только перестановкой двух аналогичных пластин (рис. 2, в, г).
Рис. 2. Маркировка зажимов фаз обмотки статора однофазного асинхронного двигателя с короткозамкнутым ротором и их соединение для вращения ротороа: а, в — правого, б, г — левого.
Сравнение технических характеристик однофазных и трехфазных асинхронных двигателей
Однофазные асинхронные двигатели отличаются от аналогичных по номинальной мощности трехфазных машин пониженной кратностью начального пускового момента kп = Mп / Mном и повышенной кратностью пускового тока ki = Mi / Mном которые для однофазных электродвигателей с пусковой фазой обмотки статора, имеющей повышенное сопротивление постоянному току и.
Пусковые характеристики однофазных асинхронных двигателей хуже аналогичных характеристик трехфазных асинхронных двигателей в связи с тем, что возбуждаемое при пуске однофазных машин с пусковой фазой обмотки статора эллиптическое вращающееся магнитное поле, эквивалентное двум неодинаковым круговым вращающимся магнитным полям — прямому и обратному, вызывает появление тормозного эффекта.
Подбором параметров элементов электрических цепей рабочей и пусковой фаз обмотки статора можно обеспечить при пуске возбуждение кругового вращающегося магнитного поля, что возможно при фазосдвигающем элементе, выполненном в виде конденсатора соответствующей емкости.
Так как разгон ротора вызывает изменение параметров цепей машины, вращающееся магнитное поле из кругового переходит в эллиптическое, ухудшая этим пусковые характеристики двигателя.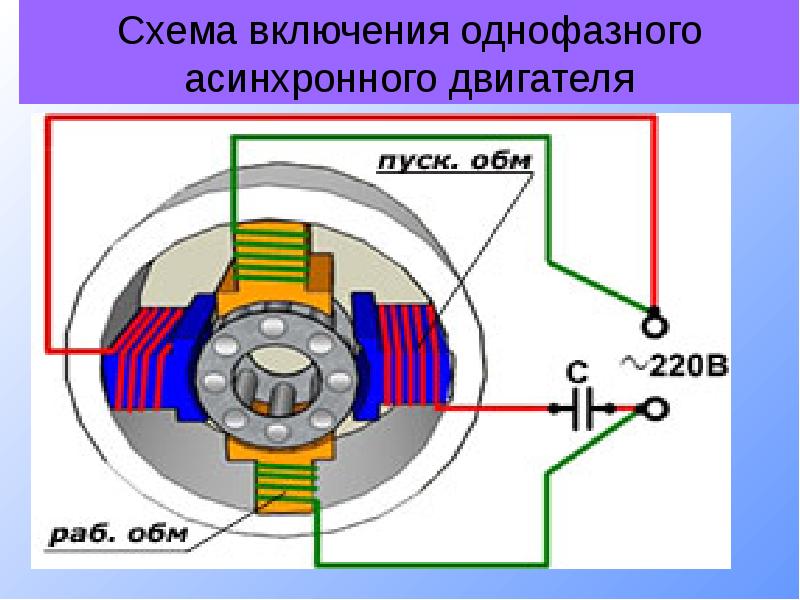 Поэтому при скорости около 0,8 номинальной пусковую фазу обмотки статора электродвигателя отключают вручную или автоматически, в результате чего двигатель переходит на однофазный режим работы.
Поэтому при скорости около 0,8 номинальной пусковую фазу обмотки статора электродвигателя отключают вручную или автоматически, в результате чего двигатель переходит на однофазный режим работы.
Однофазные асинхронные двигатели с пусковым конденсатором имеют кратность начального пускового момента kп = 1,7 — 2,4 и кратность начального пускового тока ki = 3 — 5.
Двухфазные асинхронные двигатели
В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
В одной из фаз обмотки статора постоянно находится конденсатор Ср (рис. 3, а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Емкость этого конденсатора определяют по формуле:
Емкость этого конденсатора определяют по формуле:
Cр = I1sinφ1 / 2πfUn2
где I1 и φ1— соответственно ток и сдвиг фаз между напряжением и током цепи фазы обмотки статора без конденсатора при круговом вращающемся магнитном поле, I и U — соответственно частота переменного тока и напряжение питающей сети, n- коэффициент трансформации — отношение эффективных чисел витков фаз обмотки статора соответственно с конденсатором и без него, определяемое по формуле
n = kоб2 w2 / kоб1 w1
где kоб2 и kоб1 — обмоточные коэффициенты соответствующих фаз обмотки статора с числом витков w2 и w1.
Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статора двухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так:
Uc = U √1 + n2
Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим.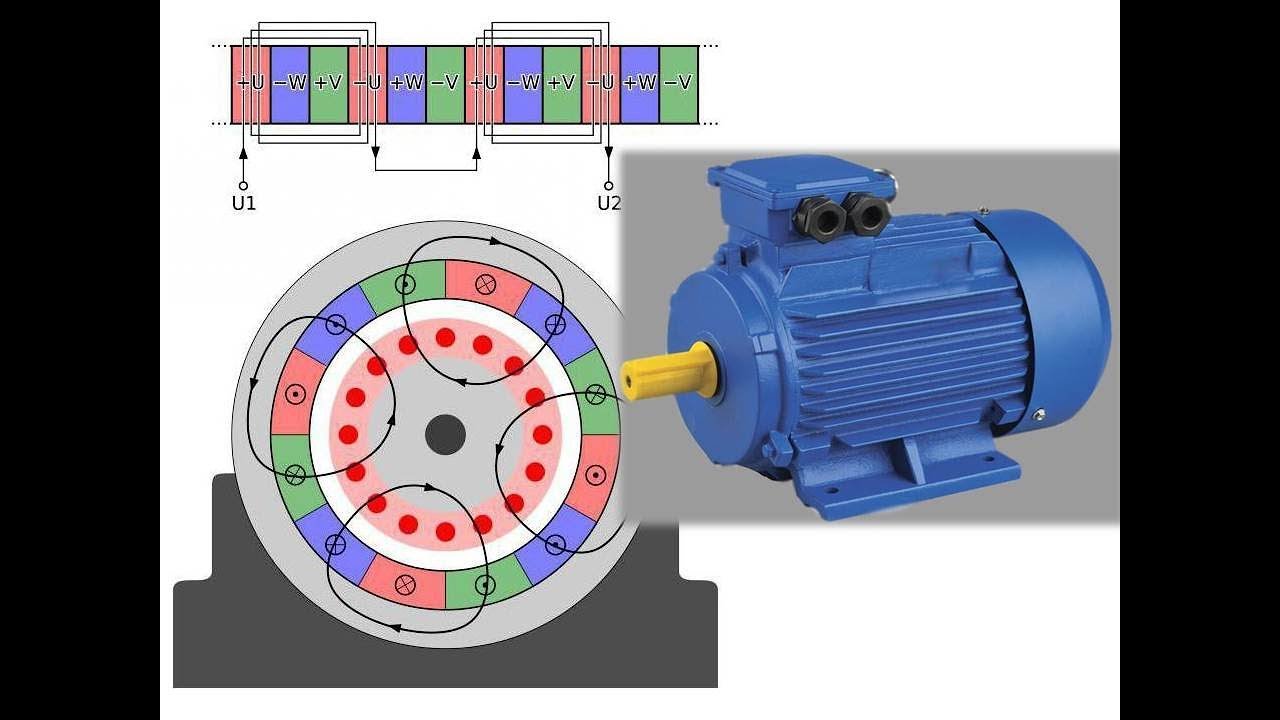
Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рис. 3, б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более.
Рис. 3. Схемы включения двухфазных асинхронных двигателей с короткозамкнутым ротором: а — спостоянно присоединенным конденсатором, б — с рабочим и пусковым конденсаторами.
После разгона ротора до скорости 0,6 — 0,7 номинальной пусковой конденсатор отключают для избежания перехода кругового вращающегося магнитного поля в эллиптическое, ухудшающее рабочие характеристики двигателя.
Пусковой режим таких конденсаторных двигателей характеризуется такими показателями: kп = 1,7 — 2,4 и ki = 4 — 6.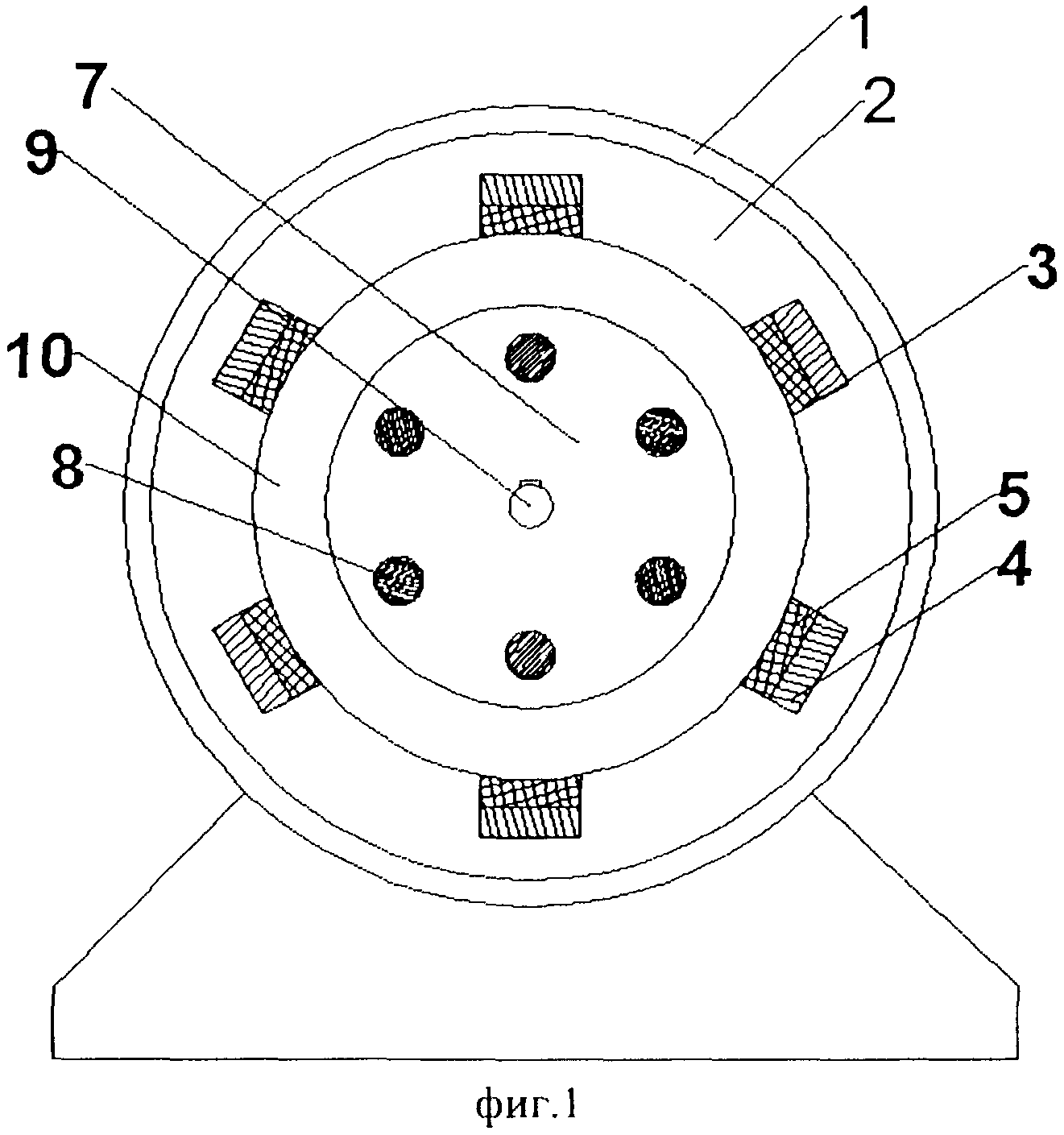
Конденсаторные двигатели отличаются лучшими энергетическими показателями, чем однофазные двигатели с пусковой фатой обмотки статора, я коэффициент мощности их, благодаря применению конденсаторов, выше, чем у трехфазных двигателей одинаковой мощности.
Универсальные асинхронные двигатели
В установках автоматического управления применяют универсальные асинхронные двигатели — трехфазные машины малой мощности, которые присоединяют к трехфазной или однофазной сети. При питании от однофазной сети пусковое и рабочие характеристики двигателей несколько хуже, чем при использовании их в трехфазном режиме.
Универсальные асинхронные двигатели серии УАД изготовляют двух- и четырехполюсными, которые при трехфазном режиме имеют номинальную мощность от 1,5 до 70 Вт, а при однофазном режиме — от 1 до 55 Вт и работают от сети переменного напряжения частотой 50 Гц с кпд η= 0,09 — 0.65.
Однофазные асинхронные двигатели с расщепленными или экранированными полюсами
В однофазных асинхронных двигателях с расщепленными или экранированными полюсами, каждый полюс расщеплен глубоким пазом па две неравные части и несет на себе однофазную обмотку, охватывающую весь магнитопровод полюса, и короткозамкнутые витки, расположенные на его меньшей части.
Ротор у этих двигателей имеет короткозамкнутую обмотку. Включение обмотки статора на синусоидальное напряжение сопровождается установлением в ней тока и возбуждением переменного магнитного поля с неподвижной осью симметрии, которое наводит в короткозамкнутых витках соответствующие эдс и токи.
Под влиянием токов короткозамкнутых витков соо тветствующая им м. д. с, возбуждает магнитное поле, препятствующее усилению и ослаблению основного магнитного поля в экранированных частых полюсов. Магнитные поля экранированных и неэкранированных частей полюсов не совпадают по фазе во времени и, будучи смещенными в пространстве, образуют результирующее эллиптическое вращающееся магнитное поле, перемещающее в направлении от магнитной оси неэранированной части полюса к магнитной оси его экранированной части.
Взаимодействие этого поля с токами, индуктированными в обмотке ротора, вызывает появление начального пускового момента Мп = (0,2 — 0,6) Мном и разгон ротора до номинальной скорости, если тормозной момент приложенный к валу двигателя, не превышает начальный пусковой момент.
С целью увеличения начального пускового и максимального моментов однофазных асинхронных двигателях с расщепленными или экранированными полюсами между их полюсами располагают магнитные шунты из листовой стали, что приближает вращающееся магнитное поле к круговому.
Двигатели с расщепленными полюсами являются нереверсивными устройствами, допускающими частые пуски, внезапную остановку и могут длительное время находиться в заторможенном состоянии. Их изготовляют двух- и четырехполюсными номинальной мощностью от 0,5 до 30 Вт, а при усовершенствованной конструкции до 300 Вт для работы от сети переменного напряжения частотой 50 Гц с кпд ηном = 0,20 — 0,40.
Конденсаторный двигатель
Конденсаторный двигатель или конденсаторный асинхронный электродвигатель — двухфазный асинхронный электродвигатель одна фаза которого постоянно подключена к сети переменного тока через конденсатор.
В ГОСТ 27471-87 [1] дано следующее определение:
Конденсаторный двигатель — двигатель с расщепленной фазой, у которого в цепь вспомогательной обмотки постоянно включен конденсатор.
Конденсаторный двигатель, хотя и питается от однофазной сети, по существу является двухфазным.
Ёмкостной сдвиг фаз с рабочим конденсатором
Ёмкостной сдвиг фаз с пусковым и рабочим конденсатором
Конструктивно конденсаторный асинхронный двигатель представляет из себя двухфазный двигатель. На статоре располагают две обмотки фаз, оси которых смещены относительно друг друга на 90 электрических градусов. Обе обмотки занимают равное число пазов. Питание электродвигателя осуществляется от однофазной сети переменного тока, при этом одна обмотка подключается непосредственно к сети, а другая через конденсатор. Таким образом, в отличии от однофазного двигателя, который после пуска работает с пульсирующим магнитным потоком, конденсаторный электродвигатель работает с вращающимся магнитным потоком.
Емкость рабочего конденсатора, требуемая для получения кругового вращающегося поля, определяется по формуле [2]
,
- где Сраб – емкость рабочего конденсатора, Ф,
- IA — ток обмотки A, А,
- IB — ток обмотки B, А,
- — угол фазового сдвига между током IA и напряжением питания U при круговом вращающемся поле, градусов,
- U — напряжение питания сети, В,
- f — частота сети, Гц,
- k — коэффициент, определяемый отношением эффективных чисел витков в обмотках фаз статора B и A.
,
- где – число последовательно соединенных витков в обмотки фазы А и B статора,
- kобА и kобВ — обмоточный коэффициент обмоток фаз статора А и B
Для повышения пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Cп. Для создания пускового момента, равного номинальному, требуется пусковой конденсатор Cп в 2 — 2,5 раза больше рабочего Cр.
Электродвигатели двухфазные
Двухфазные асинхронные бесколлекторные и коллекторные электродвигатели используются для подключения к трехфазной сети переменного тока посредством двух проводов. Кроме обмотки, которая включена в сеть непосредственно, у двухфазных двигателей есть еще и вторая обмотка. Она последовательно соединяется либо с конденсатором, либо с катушкой – с одним из фазосмещающих устройств электродвигателя. Двухфазные обмотки, которые перпендикулярны друг другу, могут создавать вращающиеся магнитные поля. Для этого фазы обмотки необходимо запитать токами, которые смещены по фазе на 90 градусов. В этом случае мы имеем вращающее магнитное поле, как в трехфазном двигателе.
Достоинства и недостатки двухфазных электродвигателей
В двухфазном электродвигателе, по аналогии с трехфазным, ротор самого двигателя получает ускорение, пока не достигнет конечной частоты вращения. Вращающий момент двухфазного электродвигателя обусловлен токами, которые вызываются вращающимся магнитным полем стержней ротора. При этом конечная частота вращения ротора ниже частоты вращения магнитного поля.
При этом конечная частота вращения ротора ниже частоты вращения магнитного поля.
- В случае, если фазы обмотки двигателя питать только от одной фазы электросети с однофазным током, для получения вращающегося магнитного поля применяют конденсаторы. Такой двигатель имеет свои недостатки. Это пульсация тока, которая, в свою очередь, уменьшает вращающий момент. Для компенсации данного недостатка установку усложняют путем отключения части емкости.
- Электродвигатели двухфазные могут быть выполнены не только с короткозамкнутым, но и с полым ротором. В таком случае ротор выполнен в виде алюминиевого цилиндра, который вращается в воздушном зазоре между внутренним и внешним статором. В алюминиевом цилиндре вращающееся поле вызывает вихревые токи. В воздушном зазоре между статорами они взаимодействуют с магнитным полем, и тем самым создают вращающийся момент электродвигателя. Конечная асинхронная частота вращения цилиндра соответствует нагрузке на валу.
- Благоприятные рабочие характеристики электродвигателя обусловлены малым моментом инерции полого ротора.
 Такие электродвигатели рассчитаны в первую очередь на малые мощности.
Такие электродвигатели рассчитаны в первую очередь на малые мощности.
 Такие электродвигатели рассчитаны в первую очередь на малые мощности.
Такие электродвигатели рассчитаны в первую очередь на малые мощности.Сферы применения двухфазных электродвигателей
Основная сфера применения двухфазных двигателей – автоматические устройства. Например, электродвигатели с полым ротором зачастую применяют для автоматического регулирования в мостовых и компенсационных схемах.
Также двухфазные электродвигатели используют, как управляемые двигатели, регулируя частоту вращения, вращающий момент, изменяя фазы напряжения обмоток. Купить качественные электродвигатели Вы можете в нашей компании.
Просмотров: 3043
Дата: Суббота, 18 Январь 2014
Однофазные и двухфазные асинхронные двигатели
Общие сведения. Однофазные асинхронные двигатели питаются от сети однофазного тока, но обмотка статора может быть при этом однофазной, двухфазной и даже трехфазной. Устройство ротора однофазного двигателя такое же, как у трехфазного. Двигатели, выпускаемые промышленностью, имеют малую мощность: от 1 Вт (серия УАД) до 400 Вт (серия ABE) и даже 600 Вт (серия АОЛБ). Однофазные асинхронные двигатели применяются в схемах автоматического управления, в различного рода бытовых устройствах, в приводах механизмов малой мощности.
Однофазные асинхронные двигатели применяются в схемах автоматического управления, в различного рода бытовых устройствах, в приводах механизмов малой мощности.
Образование вращающегося магнитного поля в однофазных двигателях. Если статор имеет лишь одну обмотку ОС, питаемую от сети синусоидальным током (рис. 3.43), тогда МДС Fc этой обмотки создает пульсирующий в пространстве магнитный поток Ф, который наводит переменную ЭДС и ток в короткозамкнутой обмотке ротора. МДС статора Fc и ротора Fp будут равны и противоположны по направлению, результирующая МДС равна нулю и, следовательно, пусковой момент равен нулю, ротор не вращается. Однако если ротор при помощи какой-либо посторонней силы привести во вращение, то в дальнейшем он будет вращаться, хотя эта сила будет снята. Это явление можно объяснить, если представить пульсирующее магнитное поле в виде суммы двух вращающихся в противоположных направлениях магнитных полей (рис.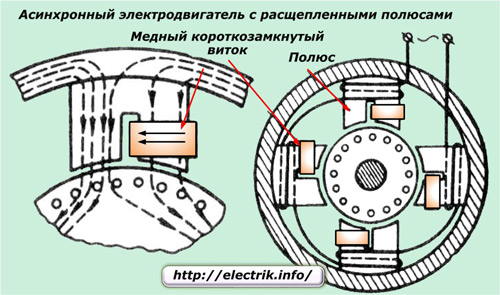 3.44).
3.44).
Одно из полей обозначим Ф+, другое Ф—. Амплитудные значения вращающихся полей одинаковы и равны половине амплитудного значения пульсирующего поля.
Механическая характеристика. Рассматривая вращающиеся поля независимо, можно установить, что одно поле, взаимодействуя с ротором, создает вращающий момент одного направления М+, а другое поле — момент противоположного направления М-. Тогда результирующий момент М = М+ — М-. На рис. 3.45 показаны механические характеристики п(М+) и п(М-).
Механическая характеристика однофазного двигателя п(М) находится графическим сложением этих характеристик.
Пуск в ход однофазного асинхронного двигателя с пусковой обмоткой. Из механической характеристики однофазного двигателя видно, что пусковой момент равен нулю. Для того чтобы однофазный двигатель пустить в ход, не прибегая к сторонней силе, на статоре размещают вторую обмотку, сдвинутую в пространстве на 90° относительно первой (рис. 3.46). В цепь второй обмотки включен конденсатор С, создающий в цепи этой обмотки сдвиг тока по фазе. Первую обмотку назовем рабочей РО, вторую — пусковой ПО. Токи РО и ПО образуют вращающееся магнитное поле, создающее при взаимодействии с ротором вращающий момент, приводящий ротор двигателя во вращение. После разгона двигателя пусковая обмотка отключается от сети.
3.46). В цепь второй обмотки включен конденсатор С, создающий в цепи этой обмотки сдвиг тока по фазе. Первую обмотку назовем рабочей РО, вторую — пусковой ПО. Токи РО и ПО образуют вращающееся магнитное поле, создающее при взаимодействии с ротором вращающий момент, приводящий ротор двигателя во вращение. После разгона двигателя пусковая обмотка отключается от сети.
Однофазный асинхронный двигатель с экранированными (расщепленными) полюсами. Статор 1 такого двигателя имеет явно выраженные полюсы, на которых расположена рабочая обмотка РО. Каждый полюс как бы расщеплен на две неравные части, одна из которых узкая, а другая — широкая. На узкой части помещен короткозамкнутый виток wк (рис. 3.47, а). Ротор двигателя короткозамкнутый, обычной конструкции. Пульсирующий магнитный поток Ф΄1, созданный переменной МДС рабочей обмотки статора, пронизывает короткозамкнутый виток и наводит в нем ЭДС Ек, которая вызывает появление тока в витке и магнитного потока Фк(рис. 3.47,6). Этот поток сдвинут по фазе относительно потока рабочей обмоткиФ˝1, складываясь с ним создает в зоне короткозамкнутого витка результирующий магнитный поток Фрез, сдвинутый по фазе относительно потока Ф1 . В результате под полюсом есть два магнитных потока Ф1 и Фрез, разнесенные в пространстве и сдвинутые по фазе (во времени), что обеспечивает получение вращающегося поля.
3.47,6). Этот поток сдвинут по фазе относительно потока рабочей обмоткиФ˝1, складываясь с ним создает в зоне короткозамкнутого витка результирующий магнитный поток Фрез, сдвинутый по фазе относительно потока Ф1 . В результате под полюсом есть два магнитных потока Ф1 и Фрез, разнесенные в пространстве и сдвинутые по фазе (во времени), что обеспечивает получение вращающегося поля.
Технические данные подобных двигателей хуже, чем трехфазных ( [ η = 0,1÷0,4; cosφ = 0,5÷0,6, Мп = (0,1÷1) Мном ), поэтому они выпускаются на мощности до нескольких десятков ватт.
Двухфазный асинхронный двигатель с постоянно включенным конденсатором. Схема двигателя приведена на рис. 3.48.
Конденсатор Ср, создавая сдвиг фаз в цепи одной из обмоток статора, позволяет получить вращающееся магнитное поле. Если вращающий момент такого двигателя недостаточен для пуска двигателя под нагрузкой, то параллельно конденсатору Ср подключается пусковой конденсатор Сп. После разгона двигателя конденсатор Сп автоматически отключается центробежным выключателем Q.
Если вращающий момент такого двигателя недостаточен для пуска двигателя под нагрузкой, то параллельно конденсатору Ср подключается пусковой конденсатор Сп. После разгона двигателя конденсатор Сп автоматически отключается центробежным выключателем Q.
Двухфазный асинхронный двигатель с полым немагнитным ротором. Такой двигатель находит применение при необходимости регулирования частоты вращения в широких пределах. Ротор двигателя 1 (рис. 3.49) изготавливают в виде полого цилиндра из немагнитного материала (например, сплава алюминия), вращающегося между внешней 2 и внутренней 3 частями статора. Обмотки статора размещаются либо на внешней, либо на внутренней части. Под влиянием вращающегося поля в теле ротора создаются вихревые токи, и их взаимодействие с вращающимся полем создает вращающий момент. Подобные двигатели обладают большим быстродействием, так как полый цилиндр имеет небольшой момент инерции.
Фазы двигателей — Надежная приводная техника Siemens (Сименс) по низким ценам со склада в Москве и под заказ
особенности фазы двигателя, и возможные варианты исполнения
Электродвигатель – это электромеханический преобразователь, который питается переменным током.
Их можно классифицировать как синхронные и асинхронные.
Отличаются они между собой принципом работы.
Синхронный электродвигатель работает на переменном токе и применяется для больших мощностей. Принцип его работы, это — ротор который вращается синхронно с магнитным полем питающего напряжения.
Асинхронный электродвигатель питается от переменного тока, это самый распространенный сейчас тип электродвигателей. Принцип его работы — под напряжением создается частота вращения ротора которая отличается от частоты вращающего магнитного поля.
Асинхронные двигатели можно систематизиравать по количеству фаз переменного тока и определить как однофазные, двухфазные, трехфазные и многофазные.
Особенности фаз электродвигателей
Однофазные двигатели как следует из его названия, подключается к однофазной сети с переменным током, и их можно подключить к сети 220В.
Асинхронный двигатель, принцип работы которого заключается в том, что его статор имеет одну обмотку, которая подключается с помощью вращающегося магнитного поля. Далее магнитное поле создается основной обмоткой и дополнительной пусковой обмоткой.
Далее магнитное поле создается основной обмоткой и дополнительной пусковой обмоткой.
Этот вид двигателя нужен в устройствах, которые не требуют особой точности. С их помощью осуществляется простое вращение с постоянной скоростью.
Асинхронные двигатели надёжны и просты в использовании, служат долго. У них есть один недостаток — это малый пусковой объем и низкое КПД.
Двигатели двухфазные
По технологии двухфазные асинхронные двигатели имеют две рабочие обмотки статора с фазными зонами по 90 эл. град. Расположены они в пазах магнитопровода статора. Эти фазы обмотки статора отличаются друг от друга числом витков, номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
Подавая переменный ток на фазы электродвигателя обмотки питаются по двум токам, образуя вращающееся магнитное поле и момент ускорения в стержнях ротора электродвигателя до достижения конечной частоты вращения поля.
В настоящее время наиболее популярный и чаще всего применяемый является асинхронный двухфазный электродвигатель, имеющий полый ротор.
Трехфазный двигатель
Предназначение трехфазного двигателя работать от трехфазной сети переменного тока.
Это электродвигатель, три рабочие обмотки статора которого с фазными зонами по 120 эл. град. при подачи трехфазного питания образуется вращающееся магнитное поле и из ротора вращающегося строго со скоростью поля статора у синхронных двигателей или несколько медленнее его у асинхронных двигателей.
За свои качества наибольшее распространение получил асинхронный электродвигатель с короткозамкнутой обмоткой ротора, так же называемой «беличье колесо»
Двухфазный двигатель — Википедия
Двухфа́зный дви́гатель — электрический двигатель переменного тока с двумя обмотками, сдвинутыми в пространстве на 90°. При подаче на двигатель двухфазного тока, сдвинутого по фазе на 90°, образуется вращающееся магнитное поле. Короткозамкнутый ротор двигателя обычно изготавливается в виде «беличьего колеса». Обычно число стержней короткозамкнутого ротора не связано с числом пар полюсов статора, то есть при двух парах полюсов статора число стержней ротора может быть например 14 штук. Есть некие соображения, по которым число стержней ротора должно быть связано с числом полюсов ротора.
Есть некие соображения, по которым число стержней ротора должно быть связано с числом полюсов ротора.
Асинхронный однофазный электродвигатель[править]
Если прервать один из трех питающих проводов вращающегося асинхронного трехфазного электродвигателя, то при небольшой нагрузке он будет продолжать работу на одной фазе. В двигателе остается вращающееся поле. Однако при однофазном включении в состоянии покоя такой двигатель не будет работать даже без нагрузки. Если третью фазу обмотки подключить через конденсатор к одному из двух питающих проводов, то трёхфазный двигатель, подсоединенный к сети однофазного тока, начнет работать и его рабочие характеристики будут сходны с характеристиками обычного трехфазного асинхронного двигателя.
Асинхронный двухфазный электродвигатель[править]
Двухфазные асинхронные двигатели:а — с короткозамкнутым ротором;
б — с полым ротором Схема подключения второй обмотки через резистор
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если эти обмотки пространственно смещены на 90° друг относительно друга. Если эти обмотки питать двумя токами, смещёнными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
Если эти обмотки питать двумя токами, смещёнными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трёхфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе обмотки статора питать от одной и той же сети однофазного тока, то сдвиг фазы в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован путем последовательного включения конденсатора с достаточной емкостью[1]. На рисунке показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
Сдвиг фазы в одной из обмоток можно получить и последовательным включением резистора, но в этом случае увеличиваются потери активной мощности. Также сдвиг фазы получается, если взамен внешнего резистора на полюсе (или полюсах) одной из обмоток размещается короткозамкнутый виток. В этом случае увеличиваются потери активной мощности в соответствующей обмотке, зато исключается внешний резистор. Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
Также сдвиг фазы получается, если взамен внешнего резистора на полюсе (или полюсах) одной из обмоток размещается короткозамкнутый виток. В этом случае увеличиваются потери активной мощности в соответствующей обмотке, зато исключается внешний резистор. Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
В настоящее время расширилась сфера применения двухфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозамкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами.
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Серийные конденсаторные двухфазные двигатели[править]
- КДП-2
- КДП-4
- КД-5
- КД-6-4 — лицензионный японский двигатель
к. т. н., профессор Шишкин В.П. Электрические микромашины (рус.)(недоступная ссылка — история) (2001). — Электрические микромашины автоматических устройств. Проверено 6 февраля 2009.
Расчет емкости конденсатора асинхронного двухфазного двигателя (конденсаторный двигатель) — Help for engineer
Расчет емкости конденсатора асинхронного двухфазного двигателя (конденсаторный двигатель)
Однофазный асинхронный двигатель
Обмотка статора однофазного асинхронного двигателя занимает приблизительно 2/3 окружности, именно по этой причине его мощность на 1/3 меньше мощности трехфазного двигателя таких же габаритов.
Ток, протекая по обмотке статора, создает пульсирующее магнитное поле, которое можно представить как два поля, вращающиеся в разных направлениях. Поле, которое вращается в направлении ротора называется прямым полем, а второе – обратным. Они воздействуют на ротор и создают соответствующие моменты (Мпр и Мобр).
По причине разных направлений вращения эти электрические машины не могут самостоятельно совершить пуск, так как при неподвижном роторе, то есть при S=1, пусковой момент, он же Мрез, равен нолю (смотри Рисунок 1). Однако, если придать движение ротору, то прямой и обратный моменты не будут равны и двигатель продолжит вращение в том же направлении (ток, протекающий по обмотке ротора будет оказывать размагничивающее действие и при этом будет ослабляться обратное поле).
Рисунок 1 — Зависимость механических характеристик от прямого и обратного вращающих полей
Пуск двигателя с помощью пусковых устройств
Для того чтоб запустить однофазный асинхронный двигатель применяют устройства для пуска двигателя:
— Конденсатор – C;
— Резистор – R.
Пуск трехфазных асинхронных двигателей осуществляется более простым способом из-за уже имеющегося в сети сдвига фаз на 120 электрических градусов
Для получения пускового момента используют пусковую обмотку статора, которая по отношению к рабочей обмотке сдвинута на 90 электрических градусов. Применяют фазосдвигающие элементы, которые подключают к пусковой обмотке. Эта обмотка работает, обычно, около 3 первых секунд, после чего принудительно отключается вручную или с помощью автоматов. По этой причине ее изготовляют из провода меньшего сечения и с меньшим количеством витков по сравнению с рабочей обмоткой.
Пуск при помощи резистора производится при малых необходимых пусковых моментах, то есть если нагрузка на валу незначительна. Рисунок 2 иллюстрирует применение пускового а) конденсатора и б) резистора; где Р – рабочая обмотка, П – пусковая обмотка.
Рисунок 2 – Схема подключения однофазного асинхронного двигателя
Двухфазные асинхронные двигатели
Наличие конденсатора значительно улучшает характеристики двигателя, по этой причине используются двухфазные асинхронные двигатели. В них две обмотки являются рабочими, в одну из них вводится конденсатор для смещения угла между фазами на 90 градусов и создания кругового магнитного поля. Такие двигатели называют конденсаторными.
В них две обмотки являются рабочими, в одну из них вводится конденсатор для смещения угла между фазами на 90 градусов и создания кругового магнитного поля. Такие двигатели называют конденсаторными.
Расчет емкости конденсатора для двигателя:
Емкость такого конденсатора определяется по формуле:
,
где – ток, протекающий в обмотке статора,
sinφ1 – сдвиг фаз между напряжение и током без конденсатора,
f– частота питающей сети,
U – напряжение сети,
n – коэффициент трансформации.
,
Где и kоб1,kоб2 — обмоточные коэффициенты,
W1, W2, — количество витков обмоток статора и ротора.
Напряжение на зажимах конденсатора выше чем напряжение сети и определяется следующей формулой:
Для повышения пусковых характеристик Существуют двигатели в одну обмотку которых ставятся два конденсатора, один из которых пусковой, второй – рабочий. Пусковой конденсатор обычно имеет емкость в разы большую чем рабочий. При этом пусковой отключается при достижении 70-80% номинальной скорости электрической машины.
Пусковой конденсатор обычно имеет емкость в разы большую чем рабочий. При этом пусковой отключается при достижении 70-80% номинальной скорости электрической машины.
Рисунок 3 – Пример подключения пары конденсаторов (конденсаторный двигатель)
Преимущества и недостатки конденсаторных двигателей
Недостатки по сравнению с трехфазным двигателем:
— Меньшая мощность;
— Увеличенное скольжение при номинальном режиме;
— Скорость вращения вала при холостом ходу ниже;
— Пониженная кратность пускового момента;
— Повышенная кратность пускового тока.
Преимущества:
— Имеют высокую эксплуатационную надежность;
— Не требуют трехфазного источника тока.
Недостаточно прав для комментирования
Одно- и двухфазные двигатели
В этом разделе рассматриваются однофазные двигатели. Сосредоточившись на индукции
двигатели, синхронно-реактивные, гистерезисные и асинхронные двигатели с расщепленными полюсами
также обсуждаются. Обратите внимание, что еще один распространенный однофазный двигатель, серия
универсальный двигатель, обсуждается в разделе 7.10. Большинство асинхронных двигателей дробных киловатт
(дробная мощность) — однофазные двигатели. В жилых и
коммерческого применения, они используются в широком спектре оборудования, включая
холодильники, кондиционеры и тепловые насосы, вентиляторы, насосы, стиральные машины и
сушилки.
Обратите внимание, что еще один распространенный однофазный двигатель, серия
универсальный двигатель, обсуждается в разделе 7.10. Большинство асинхронных двигателей дробных киловатт
(дробная мощность) — однофазные двигатели. В жилых и
коммерческого применения, они используются в широком спектре оборудования, включая
холодильники, кондиционеры и тепловые насосы, вентиляторы, насосы, стиральные машины и
сушилки.
В этом разделе мы качественно опишем эти двигатели с точки зрения
теории вращающегося поля и начнем со строгого анализа однофазного
двигатель, работающий от одной обмотки. Однако большинство однофазных индукционных
двигатели фактически двухфазные двигатели с несимметричными обмотками; два
обмотки обычно совершенно разные, с разным числом витков
и / или распределения обмоток. Таким образом, в этом разделе также обсуждается двухфазная
двигателей и включает в себя развитие количественной теории для анализа
однофазных асинхронных двигателей при работе как от их основного, так и
вспомогательные обмотки.
1. ОДНОФАЗНЫЕ ИНДУКЦИОННЫЕ ДВИГАТЕЛИ: КАЧЕСТВЕННЫЙ ИССЛЕДОВАНИЕ
РИС. 1 Схематическое изображение однофазного асинхронного двигателя.
Конструктивно наиболее распространенные типы однофазных асинхронных двигателей напоминают многофазные двигатели с короткозамкнутым ротором, за исключением расположения статора обмотки.
Асинхронный двигатель с короткозамкнутым ротором и однофазным статором
обмотка схематично представлена на фиг. 1.Вместо того, чтобы быть сосредоточенным
катушки, фактическая обмотка статора распределена в пазах, чтобы обеспечить приблизительно
синусоидальное пространственное распределение ммс. Как мы видели в разделе
4.5.1, однофазный
намотка производит равные волны ммф, вращающиеся вперед и назад. По симметрии
Понятно, что такой двигатель по своей природе не будет производить пусковой крутящий момент
так как в состоянии покоя он будет производить равный крутящий момент в обоих направлениях. Тем не мение,
покажем, что если его запустить вспомогательными средствами, то результат будет
чистый крутящий момент в направлении, в котором он запущен, и, следовательно, двигатель
будет продолжать работать.
Прежде чем рассматривать вспомогательные методы запуска, обсудим основные свойства схематического двигателя по фиг. 1. Если ток статора косинусоидальная функция времени, результирующий воздушный зазор mmf определяется уравнением. 4,18
(уравнение 1)
, который, как показано в разделе 4.5.1, можно записать как сумму положительных и отрицательно бегущие ММЖ-волны равной величины. Позитивное путешествие волна задается
(уравнение 2)
, а бегущая с отрицательной волной волна —
(Ур.3)
Каждая из этих составляющих ммс-волн вызывает работу асинхронного двигателя, но
соответствующие крутящие моменты направлены в противоположные стороны. С ротором на
отдых, прямая и обратная волны потока в воздушном зазоре, создаваемые комбинированными
mmf токов статора и ротора равны, составляющие крутящие моменты
равны, и пусковой крутящий момент не создается. Если вперед и назад
волны потока в воздушном зазоре должны были оставаться равными при вращении ротора, каждая из
поля компонентов будут давать характеристику крутящего момента-скорости, аналогичную
к таковому многофазного двигателя с незначительным сопротивлением утечки статора, как
проиллюстрированные пунктирными кривыми f и b на фиг. 2а. Результирующий крутящий момент-скорость
характеристика, которая представляет собой алгебраическую сумму двух составляющих кривых,
показывает, что если бы двигатель запускался вспомогательными средствами, он произвел бы
крутящий момент в любом направлении.
2а. Результирующий крутящий момент-скорость
характеристика, которая представляет собой алгебраическую сумму двух составляющих кривых,
показывает, что если бы двигатель запускался вспомогательными средствами, он произвел бы
крутящий момент в любом направлении.
РИС. 2 момент-скорость характеристики однофазного асинхронного двигателя
(а) на основе постоянных прямых и обратных потоков магнитных волн, (б) принимая
учитывать изменение потоковых волн.
Предположение, что волны потока в воздушном зазоре остаются равными, когда ротор
в движении — это довольно резкое упрощение реального положения дел.Во-первых, игнорируется влияние сопротивления утечки статора. Во-вторых,
эффекты индуцированных токов ротора должным образом не учитываются. Оба эти
эффекты будут в конечном итоге включены в подробную количественную теорию
Раздела 3. Следующее качественное объяснение показывает, что производительность
однофазного асинхронного двигателя значительно лучше, чем можно было бы ожидать
на основе равных прямых и обратных потоковых волн.
Когда ротор находится в движении, составляющие токи ротора, индуцируемые обратное поле больше, чем в состоянии покоя, а их коэффициент мощности равен ниже.Их ммф,
детальная количественная теория разд. 3. Следующие качественные Пояснение показывает, что производительность однофазного асинхронного двигателя значительно лучше, чем можно было бы предположить на основе равного форварда и волны обратного потока.
Когда ротор находится в движении, составляющие токи ротора, индуцируемые
обратное поле больше, чем в состоянии покоя, а их коэффициент мощности равен
ниже. Их mmf, который противодействует току статора, приводит к
уменьшение обратной магнитной волны.И наоборот, магнитный эффект
составляющие токи, индуцированные прямым полем, меньше, чем в состоянии покоя
потому что токи ротора меньше, а их коэффициент мощности выше. В качестве
скорость увеличивается, поэтому прямая магнитная волна увеличивается, а обратная
поток волны уменьшается. Сумма этих потоковых волн должна оставаться примерно постоянной. поскольку он должен индуцировать противоэдс статора, которая приблизительно постоянна
если падение напряжения в сопротивлении утечки статора невелико.
поскольку он должен индуцировать противоэдс статора, которая приблизительно постоянна
если падение напряжения в сопротивлении утечки статора невелико.
Следовательно, при вращающемся роторе крутящий момент переднего поля больше и поле обратного поля меньше, чем на фиг. 2а, истинная ситуация примерно так, как показано на фиг. 2b. В нормальном режиме бега на нескольких процент скольжения, переднее поле в несколько раз больше заднего поле, а магнитная волна не сильно отличается от постоянной амплитуды вращающееся поле в воздушном зазоре сбалансированного многофазного двигателя. В нормальном рабочей области, поэтому характеристика крутящего момента однофазного двигатель не слишком сильно уступает многофазному двигателю, имеющему тот же ротор и работает с той же максимальной плотностью потока в воздушном зазоре.
В дополнение к крутящим моментам, показанным на РИС. 2, крутящий момент с двойной частотой статора
пульсации создаются взаимодействием встречно вращающегося потока
и волны ммс, которые вращаются друг вокруг друга с удвоенной синхронной скоростью. Эти
взаимодействия не производят среднего крутящего момента, но они заставляют двигатель
шумнее, чем многофазный мотор. Такие пульсации крутящего момента неизбежны в
однофазный двигатель из-за пульсаций мгновенной потребляемой мощности
присущи однофазной цепи.Влияние пульсирующего крутящего момента
можно свести к минимуму за счет использования эластичного крепления двигателя.
Эти
взаимодействия не производят среднего крутящего момента, но они заставляют двигатель
шумнее, чем многофазный мотор. Такие пульсации крутящего момента неизбежны в
однофазный двигатель из-за пульсаций мгновенной потребляемой мощности
присущи однофазной цепи.Влияние пульсирующего крутящего момента
можно свести к минимуму за счет использования эластичного крепления двигателя.
Крутящий момент, указанный на кривых крутящего момента однофазного двигателя. — среднее по времени мгновенного крутящего момента.
2. ПУСК И РАБОТА ОДНОФАЗНОЙ ИНДУКЦИИ И СИНХРОННОЙ МОТОРЫ
Однофазные асинхронные двигатели классифицируются в зависимости от их пуска.
методы и обычно называются именами, описывающими эти методы.Выбор подходящего двигателя зависит от пускового и рабочего крутящего момента.
требования к нагрузке, рабочий цикл нагрузки и ограничения
от пускового и рабочего тока от питающей сети двигателя. В
стоимость однофазных двигателей увеличивается с их номиналом и производительностью
такие характеристики, как отношение пускового момента к току. Обычно в
для минимизации затрат инженер по применению выберет двигатель с
самый низкий рейтинг и производительность, которые могут соответствовать спецификациям
заявление.Если большое количество двигателей должно использоваться для определенного
По назначению может быть разработан специальный двигатель с целью обеспечения наименьших затрат.
В сфере производства двигателей с дробными киловаттами небольшая разница в стоимости
важный.
Обычно в
для минимизации затрат инженер по применению выберет двигатель с
самый низкий рейтинг и производительность, которые могут соответствовать спецификациям
заявление.Если большое количество двигателей должно использоваться для определенного
По назначению может быть разработан специальный двигатель с целью обеспечения наименьших затрат.
В сфере производства двигателей с дробными киловаттами небольшая разница в стоимости
важный.
Рассмотрены способы пуска и полученные характеристики крутящего момента. качественно в этом разделе. Количественная теория для анализа этих моторы развиты в разд. 4.2.
РИС. 3 Двухфазный двигатель: (а) соединения, (б) векторная диаграмма при пуске,
и (c) типичная характеристика крутящего момента-скорости.
2.1 Двухфазные двигатели
Двухфазные двигатели имеют две обмотки статора, главную обмотку (также называемую
как обмотка хода), которую мы будем обозначать индексом ‘main’
и вспомогательная обмотка (также называемая пусковой обмоткой), которая
мы будем ссылаться на него с нижним индексом «aux». Как и в двухфазном двигателе,
оси этих обмоток смещены в пространстве на 90 электрических градусов, и
они соединены, как показано на фиг. 3а. Вспомогательная обмотка имеет более высокую
отношение сопротивления к реактивному сопротивлению, чем у основной обмотки, в результате чего
два тока будут в противофазе, как показано на векторной диаграмме
фиг.3b, который представляет условия при запуске. Поскольку
ток вспомогательной обмотки I_aux опережает ток основной обмотки I_main,
Поле статора сначала достигает максимума вдоль оси вспомогательной обмотки
а затем несколько позже по времени достигает максимума по оси
основная обмотка.
Как и в двухфазном двигателе,
оси этих обмоток смещены в пространстве на 90 электрических градусов, и
они соединены, как показано на фиг. 3а. Вспомогательная обмотка имеет более высокую
отношение сопротивления к реактивному сопротивлению, чем у основной обмотки, в результате чего
два тока будут в противофазе, как показано на векторной диаграмме
фиг.3b, который представляет условия при запуске. Поскольку
ток вспомогательной обмотки I_aux опережает ток основной обмотки I_main,
Поле статора сначала достигает максимума вдоль оси вспомогательной обмотки
а затем несколько позже по времени достигает максимума по оси
основная обмотка.
Токи в обмотках эквивалентны несимметричным двухфазным токам, и
двигатель эквивалентен неуравновешенному двухфазному двигателю. Результат
вращающееся поле статора, вызывающее запуск двигателя.После мотора
запускается, вспомогательная обмотка отключается, обычно с помощью центробежного
переключатель, который работает примерно на 75% синхронной скорости. Простой
способ получения высокого отношения сопротивления к реактивному сопротивлению вспомогательной обмотки
— намотать его проволокой меньшего размера, чем основная обмотка, допустимая процедура
потому что эта обмотка работает только при пуске. Его реактивное сопротивление может быть
несколько уменьшили, поместив его в верхнюю часть прорезей. Типичный крутящий момент-скорость
характеристика такого двигателя показана на фиг.3c.
Его реактивное сопротивление может быть
несколько уменьшили, поместив его в верхнюю часть прорезей. Типичный крутящий момент-скорость
характеристика такого двигателя показана на фиг.3c.
Электродвигатели с разделенной фазой имеют умеренный пусковой момент при низком пусковом токе. Типичные области применения включают вентиляторы, нагнетатели, центробежные насосы и офисные помещения. оборудование. Типичные значения от 50 до 500 Вт; в этом диапазоне они доступные двигатели с самой низкой стоимостью.
2,2 Конденсаторные двигатели
РИС. 4 Двигатель с конденсаторным пуском: (а) соединения, (б) векторная диаграмма на
пуск, и (c) типичная характеристика крутящего момента-скорости.
могут использоваться для улучшения пусковых характеристик двигателя, рабочих характеристик,
или и то, и другое, в зависимости от размера и подключения конденсатора. Конденсатор-старт
двигатель также является двухфазным двигателем, но смещение фазы между
два тока получаются с помощью конденсатора, включенного последовательно с
вспомогательная обмотка, как показано на фиг. 4а. Снова вспомогательная обмотка
отключается после запуска двигателя, и, следовательно, вспомогательный
обмотка и конденсатор могут быть спроектированы с минимальными затратами для работы в прерывистом режиме.
4а. Снова вспомогательная обмотка
отключается после запуска двигателя, и, следовательно, вспомогательный
обмотка и конденсатор могут быть спроектированы с минимальными затратами для работы в прерывистом режиме.
При использовании пускового конденсатора соответствующей емкости вспомогательная обмотка ток I aux в состоянии покоя можно сделать так, чтобы он опережал ток основной обмотки Я подключаюсь на 90 электрических градусов, как в сбалансированном двухфазном двигателе. (см. фиг. 4b). На практике лучший компромисс между пусковым моментом, пусковой ток и стоимость обычно связаны с фазовым углом несколько менее 90 °. Типичная характеристика крутящего момента-скорости показана на фиг. 4c, выдающейся особенностью является высокий пусковой крутящий момент.Эти двигатели используются для компрессоров, насосов, холодильного оборудования и оборудования для кондиционирования воздуха, а также другие трудно запускаемые нагрузки. Конденсаторный двигатель в разрезе показанный на фиг. 5.
В двигателе с постоянным разделением конденсаторов конденсатор и вспомогательная обмотка
не вырезаются после запуска; конструкция может быть упрощена за счет пропусков
переключателя, а также улучшились коэффициент мощности, КПД и пульсации крутящего момента. Например, конденсатор и вспомогательная обмотка могут быть разработаны для идеального
двухфазный режим (т.е.е., отсутствие обратной магнитной волны) при любой желаемой нагрузке.
Тогда потери из-за обратного поля в этой рабочей точке будут
быть устранены, что приведет к повышению эффективности. Двойная частота статора
пульсации крутящего момента также будут устранены, а конденсатор будет служить
резервуар для хранения энергии для сглаживания пульсаций потребляемой мощности
от однофазной сети, что приводит к более тихой работе.
Например, конденсатор и вспомогательная обмотка могут быть разработаны для идеального
двухфазный режим (т.е.е., отсутствие обратной магнитной волны) при любой желаемой нагрузке.
Тогда потери из-за обратного поля в этой рабочей точке будут
быть устранены, что приведет к повышению эффективности. Двойная частота статора
пульсации крутящего момента также будут устранены, а конденсатор будет служить
резервуар для хранения энергии для сглаживания пульсаций потребляемой мощности
от однофазной сети, что приводит к более тихой работе.
Пусковой момент нужно пожертвовать, потому что выбор емкости обязательно компромисс между лучшими начальными и рабочими значениями.В даны результирующая характеристика крутящего момента-скорости и принципиальная схема. на фиг. 6.
РИС. 5 Асинхронный двигатель с конденсаторным пуском в разрезе.
Пусковой выключатель находится справа от ротора. Мотор каплезащищенный строительство.
РИС. 6 Двигатель с постоянным разделением конденсаторов и типовая характеристика крутящего момента.
РИС. 7 Конденсаторный пуск, двигатель с конденсаторным питанием и типичная скорость крутящего момента
характеристика.
Если используются два конденсатора, один для пускового и один для рабочего, теоретически могут быть достигнуты оптимальные пусковые и эксплуатационные характеристики. Один способ достижение этого результата показано на фиг. 7а. Малое значение емкости необходим для оптимальных условий работы постоянно подключен последовательно со вспомогательной обмоткой, и гораздо большее значение, необходимое для запуска получается конденсатором, подключенным параллельно рабочему конденсатору через переключатель с размыкается, когда двигатель набирает скорость.Такой мотор известный как конденсаторный двигатель с конденсаторным запуском.
Конденсатор для двигателя с конденсаторным пуском имеет типичное значение 300 #F.
для мотора мощностью 500 Вт. Поскольку он должен проводить ток только в течение времени пуска,
Конденсатор представляет собой специальный компактный электролитический конденсатор переменного тока, предназначенный для запуска двигателей.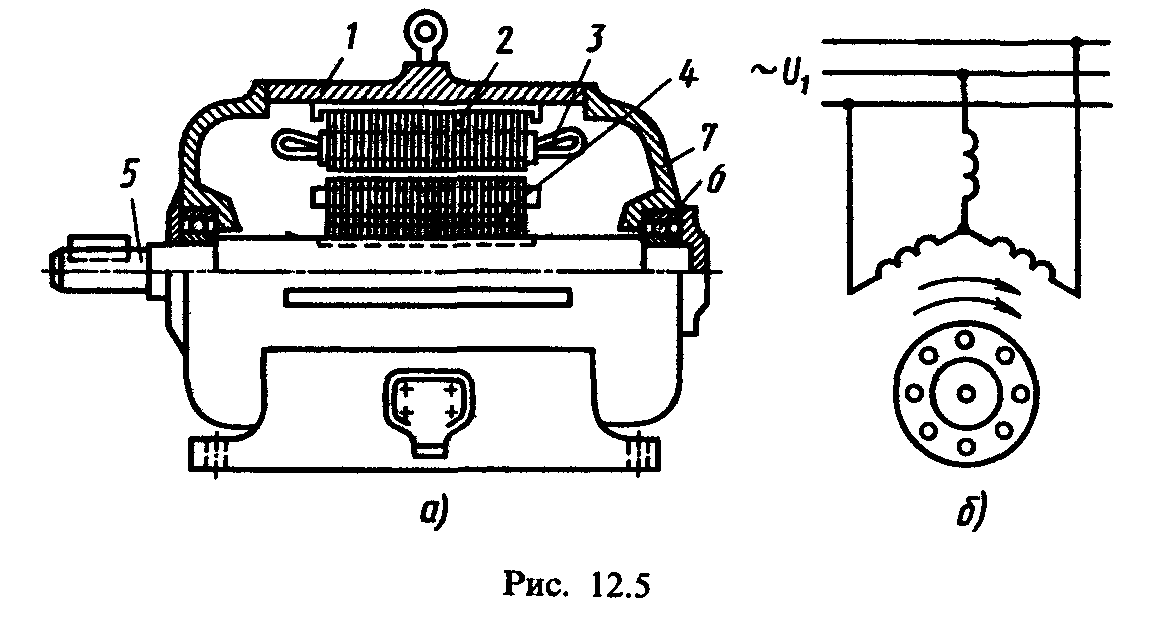 долг. Конденсатор для того же постоянно подключенного двигателя имеет типичное
рейтинг 40 #E, и поскольку он работает непрерывно, конденсатор
бумага переменного тока, фольга и масло.Стоимость различных типов двигателей зависит от
к производительности: двигатель с конденсаторным пуском имеет самую низкую стоимость, конденсатор с постоянным разделением
двигатель следующий, и конденсаторный запуск, двигатель с конденсатором самой высокой стоимости.
долг. Конденсатор для того же постоянно подключенного двигателя имеет типичное
рейтинг 40 #E, и поскольку он работает непрерывно, конденсатор
бумага переменного тока, фольга и масло.Стоимость различных типов двигателей зависит от
к производительности: двигатель с конденсаторным пуском имеет самую низкую стоимость, конденсатор с постоянным разделением
двигатель следующий, и конденсаторный запуск, двигатель с конденсатором самой высокой стоимости.
——————
Практическая задача 1
Рассмотрим двигатель из Примера 1. Найдите фазовый угол между основными и токи вспомогательной обмотки при замене конденсатора емкостью 177 мкФ на конденсатор емкостью 200 мкФ.
Решение
85.2 °
—————-
2,3 Асинхронные двигатели с экранированными полюсами
Как схематично показано на фиг. 8а, асинхронный двигатель с экранированными полюсами
обычно имеет выступающие полюса с одной частью каждого полюса, окруженной
короткозамкнутый виток меди называется затеняющей катушкой. Наведенные токи в
Затеняющая катушка вызывает отставание потока в затененной части полюса
флюс в другой части. Результат похож на вращающееся поле
движение в направлении от незатененной части к затемненной части столба;
в роторе с короткозамкнутым ротором индуцируются токи и низкий пусковой момент
производится.Типичная характеристика крутящего момента-скорости показана на фиг. 8b.
Их эффективность невысока, но двигатели с расщепленными полюсами являются наименее дорогими.
тип субфракционного киловаттного двигателя. Их можно найти в рейтингах примерно до
50 Вт.
Наведенные токи в
Затеняющая катушка вызывает отставание потока в затененной части полюса
флюс в другой части. Результат похож на вращающееся поле
движение в направлении от незатененной части к затемненной части столба;
в роторе с короткозамкнутым ротором индуцируются токи и низкий пусковой момент
производится.Типичная характеристика крутящего момента-скорости показана на фиг. 8b.
Их эффективность невысока, но двигатели с расщепленными полюсами являются наименее дорогими.
тип субфракционного киловаттного двигателя. Их можно найти в рейтингах примерно до
50 Вт.
РИС. 8 Асинхронный двигатель с расщепленными полюсами и типовая характеристика крутящего момента.
РИС. 9 Пробивка ротора для четырехполюсного синхронно-реактивного двигателя и
типичная характеристика крутящий момент-скорость.
2,4 Самозапускающиеся синхронно-реактивные двигатели
Любой из типов асинхронных двигателей, описанных выше, может быть преобразован в
самозапускающийся синхронно-реактивный двигатель. Все, что вызывает сопротивление
воздушного зазора в зависимости от углового положения ротора относительно
к оси обмотки статора будет создавать реактивный момент, когда ротор
вращающийся с синхронной скоростью. Например, предположим, что некоторые зубы
снимается с ротора с короткозамкнутым ротором, оставляя стержни и концевые элементы целыми
как в обычном асинхронном двигателе с короткозамкнутым ротором. ИНЖИР. 9а показано ламинирование
для такого ротора рассчитан на использование с четырехполюсным статором. Статор может
быть многофазным или любым из однофазных типов, описанных выше.
Все, что вызывает сопротивление
воздушного зазора в зависимости от углового положения ротора относительно
к оси обмотки статора будет создавать реактивный момент, когда ротор
вращающийся с синхронной скоростью. Например, предположим, что некоторые зубы
снимается с ротора с короткозамкнутым ротором, оставляя стержни и концевые элементы целыми
как в обычном асинхронном двигателе с короткозамкнутым ротором. ИНЖИР. 9а показано ламинирование
для такого ротора рассчитан на использование с четырехполюсным статором. Статор может
быть многофазным или любым из однофазных типов, описанных выше.
Двигатель запускается как асинхронный и при малых нагрузках будет увеличивать скорость.
до небольшого значения скольжения. Момент сопротивления возникает из-за тенденции
ротора, чтобы попытаться выровнять себя в положении с минимальным сопротивлением
относительно синхронно вращающейся прямой волны магнитного потока в воздушном зазоре, в соответствии с
с принципами, обсуждаемыми в разделе 3. При небольшом скольжении этот крутящий момент
медленно чередуется по направлению; ротор ускоряется во время положительного
полупериод изменения крутящего момента и замедление во время последующего
отрицательный полупериод. Если момент инерции ротора и его механический
нагрузка достаточно мала, ротор будет ускоряться от скорости скольжения
до синхронной скорости в течение ускоряющего полупериода реактивного сопротивления
крутящий момент.
Если момент инерции ротора и его механический
нагрузка достаточно мала, ротор будет ускоряться от скорости скольжения
до синхронной скорости в течение ускоряющего полупериода реактивного сопротивления
крутящий момент.
После этого ротор синхронизируется и продолжает работать в синхронном режиме. скорость.
Наличие любой волны магнитного потока в статоре, вращающейся в обратном направлении, создает крутящий момент. пульсации и дополнительные потери, но синхронная работа будет сохранена при условии, что момент нагрузки не является чрезмерным.
Типичная характеристика крутящего момента-скорости для синхронно-реактивного запуска с разделением фаз
двигатель показан на фиг. 9b. Обратите внимание на высокие значения крутящего момента асинхронного двигателя.
Причина этого в том, что для получения удовлетворительного синхронного двигателя
характеристик, было сочтено необходимым построить синхронно-реактивный
двигатели в корпусах, подходящих для асинхронных двигателей с двумя или
в три раза превышающие номинальные характеристики синхронного двигателя. Также обратите внимание, что главный
влияние явнополюсного ротора на характеристики асинхронного двигателя
в состоянии покоя, где заметны значительные «зубцы»; я.е.,
крутящий момент значительно зависит от положения ротора.
Также обратите внимание, что главный
влияние явнополюсного ротора на характеристики асинхронного двигателя
в состоянии покоя, где заметны значительные «зубцы»; я.е.,
крутящий момент значительно зависит от положения ротора.
2,5 Гистерезисные двигатели
Явление гистерезиса можно использовать для создания механического крутящего момента.
В простейшем виде ротор гистерезисного двигателя представляет собой гладкий цилиндр.
из магнитотвердой стали, без обмоток и зубцов. Он находится внутри
статор с пазами, несущий распределенные обмотки, предназначенный для производства почти
возможно синусоидальное пространственное распределение потока, так как волнистости в
волна потока значительно увеличивает потери.В однофазных двигателях статор
обмотки обычно относятся к типу постоянных разделенных конденсаторов, как на фиг. 6.
Конденсатор выбран так, чтобы в результате получался примерно сбалансированный двухфазный
условия в обмотках двигателя. Затем статор производит в первую очередь
поле космического основного воздушного зазора вращается с синхронной скоростью.
РИС. 10 (а) Общий характер магнитного поля в воздушном зазоре и
ротор гистерезисного двигателя; (б) идеализированная характеристика крутящего момента-скорости.
Отображаются мгновенные магнитные условия в воздушном зазоре и роторе. на фиг. 10а для двухполюсного статора. Ось S S ‘волны статора-ммс вращается с синхронной скоростью. Из-за гистерезиса намагниченность ротора отстает от индуцирующей ММП-волны, поэтому ось R R ‘волны магнитного потока ротора отстает от оси статор-ммс волны на величину гистерезисный угол 6 запаздывания (фиг. 10а). Если ротор неподвижен, запуск крутящий момент создается пропорционально произведению основных компонентов статора mmf и потока ротора и синуса угла крутящего момента 6.В ротор затем ускоряется, если крутящий момент нагрузки меньше развиваемого крутящий момент мотора.
Пока ротор вращается со скоростью ниже синхронной, каждая область
ротора подвергается повторяющемуся гистерезисному циклу на частоте скольжения.
Во время разгона ротора угол запаздывания 6 остается постоянным, если поток
постоянна, поскольку угол 6 зависит только от петли гистерезиса
материал ротора и не зависит от скорости прохождения петли. Таким образом, двигатель развивает постоянный крутящий момент вплоть до синхронной скорости,
как показано на идеализированной характеристике крутящий момент-скорость на фиг. 10б. Этот
Особенность — одно из преимуществ гистерезисного двигателя. По сравнению с
реактивный двигатель, который должен «синхронизировать» свою нагрузку
из характеристики крутящего момента асинхронного двигателя, гистерезисный двигатель
может синхронизировать любую нагрузку, которую он может ускорить, независимо от того, насколько велик
инерция. После достижения синхронизма двигатель продолжает работать в синхронном режиме.
скорость и регулирует угол крутящего момента, чтобы развить необходимый крутящий момент
по нагрузке.
Таким образом, двигатель развивает постоянный крутящий момент вплоть до синхронной скорости,
как показано на идеализированной характеристике крутящий момент-скорость на фиг. 10б. Этот
Особенность — одно из преимуществ гистерезисного двигателя. По сравнению с
реактивный двигатель, который должен «синхронизировать» свою нагрузку
из характеристики крутящего момента асинхронного двигателя, гистерезисный двигатель
может синхронизировать любую нагрузку, которую он может ускорить, независимо от того, насколько велик
инерция. После достижения синхронизма двигатель продолжает работать в синхронном режиме.
скорость и регулирует угол крутящего момента, чтобы развить необходимый крутящий момент
по нагрузке.
Двигатель с гистерезисом по своей природе тихий и обеспечивает плавное вращение
его нагрузка. Кроме того, ротор принимает такое же количество полюсов, что и
поле статора. Двигатель приспособлен к многоскоростной синхронной работе.
когда статор намотан с несколькими наборами обмоток и использует переключение полюсов
соединения. Гистерезисный двигатель может ускорять и синхронизировать высокоинерционный
нагрузки, потому что его крутящий момент одинаков от места до синхронной скорости.
Гистерезисный двигатель может ускорять и синхронизировать высокоинерционный
нагрузки, потому что его крутящий момент одинаков от места до синхронной скорости.
3. ОБОРОТНАЯ ТЕОРИЯ ОДНОФАЗНЫХ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ
Как описано в Разд. 1, статор-ммс волна однофазной индукции
Можно показать, что двигатель эквивалентен двум волнам ммс постоянной амплитуды.
вращаются с синхронной скоростью в противоположных направлениях. Каждый из этих компонентов
волны статора-ммс индуцируют собственные составляющие токи ротора и создают асинхронный двигатель.
действие, как в сбалансированном многофазном двигателе. Это двойное вращающееся поле
концепция не только полезна для качественной визуализации, но и может быть
превратилась в количественную теорию, применимую к широкому спектру асинхронных двигателей.
типы.Мы не будем здесь обсуждать полную количественную теорию. 1 Однако
мы рассмотрим более простой, но важный случай однофазной индукции
двигатель работает только на своей основной обмотке.
Рассмотрим условия с неподвижным ротором и только главным статором. обмотка возбуждена. Тогда двигатель эквивалентен трансформатору с его вторичное короткое замыкание. Эквивалентная схема показана на фиг. 11 a, где R1, main и X 1, main — соответственно сопротивление и утечка реактивное сопротивление основной обмотки, Xm, main — реактивное сопротивление намагничивания, и R2, main и X2, main — значения сопротивления ротора в состоянии покоя и реактивное сопротивление утечки относительно основной обмотки статора при использовании соответствующих отношение оборотов.Потери в сердечнике, которые здесь не указаны, будут учтены позже. как если бы это была потеря вращения. Приложенное напряжение равно f ‘, а основная обмотка ток — I_main. Напряжение J_main — это противоэдс, генерируемая в основная обмотка стационарной пульсирующей магнитной волной в воздушном зазоре, создаваемой совместное действие токов статора и ротора.
РИС. 11 Эквивалентные схемы для однофазного асинхронного двигателя: (а)
ротор заблокирован (b) ротор заблокирован, показывая эффекты прямого и обратного
поля; (c) рабочие условия.
В соответствии с концепцией двойного вращающегося поля разд. 1, статора mmf можно разделить на половину амплитуды вращения вперед и назад поля. В состоянии покоя амплитуды прямого и обратного равнодействующих Волны потока в воздушном зазоре равны половине амплитуды пульсирующего поля. На фиг. 11b часть эквивалентной схемы, представляющая эффекты потока воздушного зазора делится на две равные части, представляющие эффекты переднего и заднего полей соответственно.
Теперь рассмотрим условия после того, как двигатель набрал скорость с помощью
некоторые вспомогательные средства и работает только на своей основной обмотке в направлении
переднего поля при удельном скольжении с. Токи ротора, индуцированные
прямое поле имеет частоту скольжения sfe, где fe — приложенный статор
электрическая частота. Как и в любом многофазном двигателе с симметричным многофазным двигателем.
или ротор с короткозамкнутым ротором, эти токи ротора создают бегущую волну ММЧ
вперед со скоростью скольжения по отношению к ротору и, следовательно, при синхронной
скорость относительно статора. Результирующая прямых волн
статор и ротор mmf создают результирующую прямую волну потока в воздушном зазоре, который
формирует противоэдс J_main, f в основной обмотке статора. В
отраженный эффект ротора, если смотреть со стороны статора, такой же, как в
многофазный двигатель и может быть представлен импедансом 0,5R2, основной / S Jr
j0,5X2, основной параллельно j0,5Xm, основной как в части эквивалента
схема фиг. 1 ЖК с надписью «f». Коэффициент 0,5 зависит от разрешения
пульсирующего статора mmf на переднюю и заднюю составляющие.
Результирующая прямых волн
статор и ротор mmf создают результирующую прямую волну потока в воздушном зазоре, который
формирует противоэдс J_main, f в основной обмотке статора. В
отраженный эффект ротора, если смотреть со стороны статора, такой же, как в
многофазный двигатель и может быть представлен импедансом 0,5R2, основной / S Jr
j0,5X2, основной параллельно j0,5Xm, основной как в части эквивалента
схема фиг. 1 ЖК с надписью «f». Коэффициент 0,5 зависит от разрешения
пульсирующего статора mmf на переднюю и заднюю составляющие.
Теперь рассмотрим условия относительно обратного поля. Ротор
все еще поворачиваясь со смещением s по отношению к переднему полю, и его единичная
скорость n в направлении переднего поля n = 1 с. Относительная скорость
ротора относительно обратного поля составляет 1 + n, либо его скольжение с
по отношению к обратному полю 1 + n = 2 с. Обратное поле тогда индуцирует
токи ротора с частотой (2 с) fe. При небольших скольжениях этот ротор
токи почти в два раза превышают частоту статора.
Следовательно, при небольшом скольжении осциллограмма тока ротора будет показать высокочастотную составляющую от обратного поля, наложенную на низкочастотная составляющая от прямого поля. Если смотреть со стороны статора, волна ротор-ммс индуцированного обратным полем тока ротора проходит на синхронная скорость, но в обратном направлении. Схема замещения представление этих внутренних реакций с точки зрения статора как у многофазного двигателя, скольжение которого составляет 2 с и показано в части эквивалентной схемы (фиг.11c) обозначен буквой «b». Как и с форвардом поле, коэффициент 0,5 зависит от разрешения пульсирующего статора mmf на прямые и обратные компоненты. Напряжение J ~ main, b на параллельная комбинация, представляющая обратное поле, является противоэдс. генерируется в основной обмотке статора результирующим обратным полем.
Используя эквивалентную схему фиг. 11 в, ток статора, мощность
входной мощности, а коэффициент мощности можно вычислить для любого предполагаемого значения скольжения, когда
приложенное напряжение и полное сопротивление двигателя известны. Чтобы упростить
обозначение, пусть
Чтобы упростить
обозначение, пусть
(уравнение 4)
(уравнение 5)
Импедансы, представляющие реакции прямого и обратного полей с точки зрения однофазной главной обмотки статора 0,5Zf и 0,5Zb соответственно на фиг. 11 с.
Исследование эквивалентной схемы (фиг. 11c) подтверждает вывод, достигнутые качественными рассуждениями в разд. 1 (фиг. 2b), что передний волна потока в воздушном зазоре увеличивается, а обратная волна уменьшается, когда ротор приводится в движение.Когда двигатель работает с небольшим скольжением, отраженный влияние сопротивления ротора в прямом поле, 0,5 R2, main / S, значительно больше, чем его значение состояния покоя, в то время как соответствующий эффект в обратное поле, 0,5R2, основное / (2 с), меньше.
Следовательно, импеданс в прямом поле больше, чем значение покоя,
в то время как обратное поле меньше. Счетчик ЭДС прямого поля
Emain, f поэтому больше, чем его значение состояния покоя, в то время как обратное поле
счетчик ЭДС / ~ main, b меньше; я. т.е. прямая волна потока в воздушном зазоре увеличивается,
в то время как волна обратного потока уменьшается.
т.е. прямая волна потока в воздушном зазоре увеличивается,
в то время как волна обратного потока уменьшается.
Механическая мощность и крутящий момент могут быть вычислены путем приложения крутящего момента. и отношения мощности, разработанные для многофазных двигателей в разделе 6. Крутящие моменты каждое из полей прямого и обратного направления может рассматриваться в этом манера. Взаимодействие встречно вращающегося потока и ММП-волн вызывает пульсации крутящего момента при удвоенной частоте статора, но без среднего крутящего момента.
[…]
Проверка порядка величины числовых значений в Примере 2 предлагает приближения, которые обычно могут быть сделаны. Эти приближения относятся, в частности, к сопротивлению обратного поля. Обратите внимание, что импеданс 0,5 (Rb + j Xb) составляет всего около 5 процентов от общего импеданса двигателя для скольжение почти при полной нагрузке.
Следовательно, приблизительно 20 процентов этого импеданса
вызовет ошибку только около 1% в токе двигателя. Хотя строго
говоря, импеданс обратного поля является функцией скольжения, очень мало
ошибка обычно возникает в результате вычисления ее значения при любом удобном вводе
нормальная рабочая область, например, 5 процентов, а затем предполагая, что Rb и Xb
быть константами.
Хотя строго
говоря, импеданс обратного поля является функцией скольжения, очень мало
ошибка обычно возникает в результате вычисления ее значения при любом удобном вводе
нормальная рабочая область, например, 5 процентов, а затем предполагая, что Rb и Xb
быть константами.
В несколько большем приближении эффект шунтирования j Xm, основной на импеданс обратного поля, часто можно пренебречь, откуда
(уравнение 15)
Это уравнение дает значения сопротивления обратного поля, которые на несколько процентов выше, что можно увидеть при сравнении с точным выражением приведено в примере 2.
Пренебрегая s в уравнении. 9.15 будет иметь тенденцию давать значения обратного поля сопротивление, которое было бы слишком низким, и поэтому такое приближение имеют тенденцию противодействовать ошибке в формуле. 9.15. Следовательно, для небольших промахов
(уравнение 16)
В многофазном двигателе (раздел 6.5) максимальный внутренний крутящий момент и
скольжение, при котором оно происходит, легко выразить в параметрах двигателя;
максимальный внутренний крутящий момент не зависит от сопротивления ротора. Нет таких
простые выражения существуют для однофазного двигателя. Однофазная проблема
гораздо сложнее из-за наличия обратного поля,
эффект которого двоякий: (1) он поглощает часть приложенного напряжения,
тем самым уменьшая доступное для прямого поля напряжение и уменьшая
развиваемый передний крутящий момент; и (2) обратное поле дает отрицательные
крутящий момент, уменьшая эффективный развиваемый крутящий момент. Оба эти эффекта зависят от
от сопротивления ротора, а также реактивного сопротивления утечки.Следовательно, в отличие от
многофазный двигатель, максимальный внутренний крутящий момент однофазного двигателя составляет
зависит от сопротивления ротора; с увеличением сопротивления ротора уменьшается
максимальный крутящий момент и увеличивает скольжение, при котором возникает максимальный крутящий момент.
Нет таких
простые выражения существуют для однофазного двигателя. Однофазная проблема
гораздо сложнее из-за наличия обратного поля,
эффект которого двоякий: (1) он поглощает часть приложенного напряжения,
тем самым уменьшая доступное для прямого поля напряжение и уменьшая
развиваемый передний крутящий момент; и (2) обратное поле дает отрицательные
крутящий момент, уменьшая эффективный развиваемый крутящий момент. Оба эти эффекта зависят от
от сопротивления ротора, а также реактивного сопротивления утечки.Следовательно, в отличие от
многофазный двигатель, максимальный внутренний крутящий момент однофазного двигателя составляет
зависит от сопротивления ротора; с увеличением сопротивления ротора уменьшается
максимальный крутящий момент и увеличивает скольжение, при котором возникает максимальный крутящий момент.
В основном из-за эффектов обратного поля однофазный
асинхронный двигатель несколько уступает многофазному двигателю, использующему тот же
ротор и тот же сердечник статора. Однофазный двигатель имеет нижний максимум
крутящий момент, возникающий при более низком скольжении.При том же крутящем моменте однофазный
двигатель имеет более высокое скольжение и большие потери, в основном из-за обратного поля
ротор 12R потери. Вольт-амперный вход однофазного двигателя больше,
главным образом из-за мощности и реактивных вольт-ампер, потребляемых
обратное поле. Потери статора 12R также несколько выше в однофазном
двигатель, потому что одна фаза, а не несколько, должна пропускать весь ток.
Из-за больших потерь КПД ниже, а температура
подъем при том же крутящем моменте выше.Для
однофазный двигатель, чем многофазный двигатель той же мощности и скорости
рейтинг. Благодаря большему размеру рамы максимальный крутящий момент может быть достигнут
сравнимо с физически меньшими по размеру, но с одинаковым рейтингом многофазных
мотор. Несмотря на больший размер корпуса и необходимость вспомогательного
пусковые устройства, однофазные двигатели общего назначения в стандарте
дробные киловаттные рейтинги стоят примерно столько же, сколько соответственно
номинальные многофазные двигатели из-за гораздо большего объема производства
из бывшего.
Однофазный двигатель имеет нижний максимум
крутящий момент, возникающий при более низком скольжении.При том же крутящем моменте однофазный
двигатель имеет более высокое скольжение и большие потери, в основном из-за обратного поля
ротор 12R потери. Вольт-амперный вход однофазного двигателя больше,
главным образом из-за мощности и реактивных вольт-ампер, потребляемых
обратное поле. Потери статора 12R также несколько выше в однофазном
двигатель, потому что одна фаза, а не несколько, должна пропускать весь ток.
Из-за больших потерь КПД ниже, а температура
подъем при том же крутящем моменте выше.Для
однофазный двигатель, чем многофазный двигатель той же мощности и скорости
рейтинг. Благодаря большему размеру рамы максимальный крутящий момент может быть достигнут
сравнимо с физически меньшими по размеру, но с одинаковым рейтингом многофазных
мотор. Несмотря на больший размер корпуса и необходимость вспомогательного
пусковые устройства, однофазные двигатели общего назначения в стандарте
дробные киловаттные рейтинги стоят примерно столько же, сколько соответственно
номинальные многофазные двигатели из-за гораздо большего объема производства
из бывшего.
4. ДВУХФАЗНЫЕ ИНДУКЦИОННЫЕ ДВИГАТЕЛИ
Как мы видели, большинство однофазных асинхронных двигателей фактически сконструированы в виде двухфазных двигателей с двумя обмотками статора в пространственной квадратуре. Основная и вспомогательная обмотки обычно совершенно разные, с разными количество витков, размер провода и распределение витков. Эта разница в комбинация с конденсатором, который обычно используется последовательно с вспомогательная обмотка, гарантирует, что ММФ производятся двумя обмотками токи будут довольно несбалансированными; в лучшем случае они могут быть сбалансированы по одному конкретному рабочая точка.Таким образом, мы обсудим различные аналитические методы для двухфазные двигатели, чтобы расширить наше понимание и понимание машины производительности, а также разработать методики анализа одно- и двухфазные двигатели.
В сбалансированных условиях эксплуатации симметричный двухфазный двигатель может
быть проанализированы с использованием методов, разработанных в разделе
6 для трехфазных двигателей,
немного изменен, чтобы учесть тот факт, что есть два
фазы, а не три.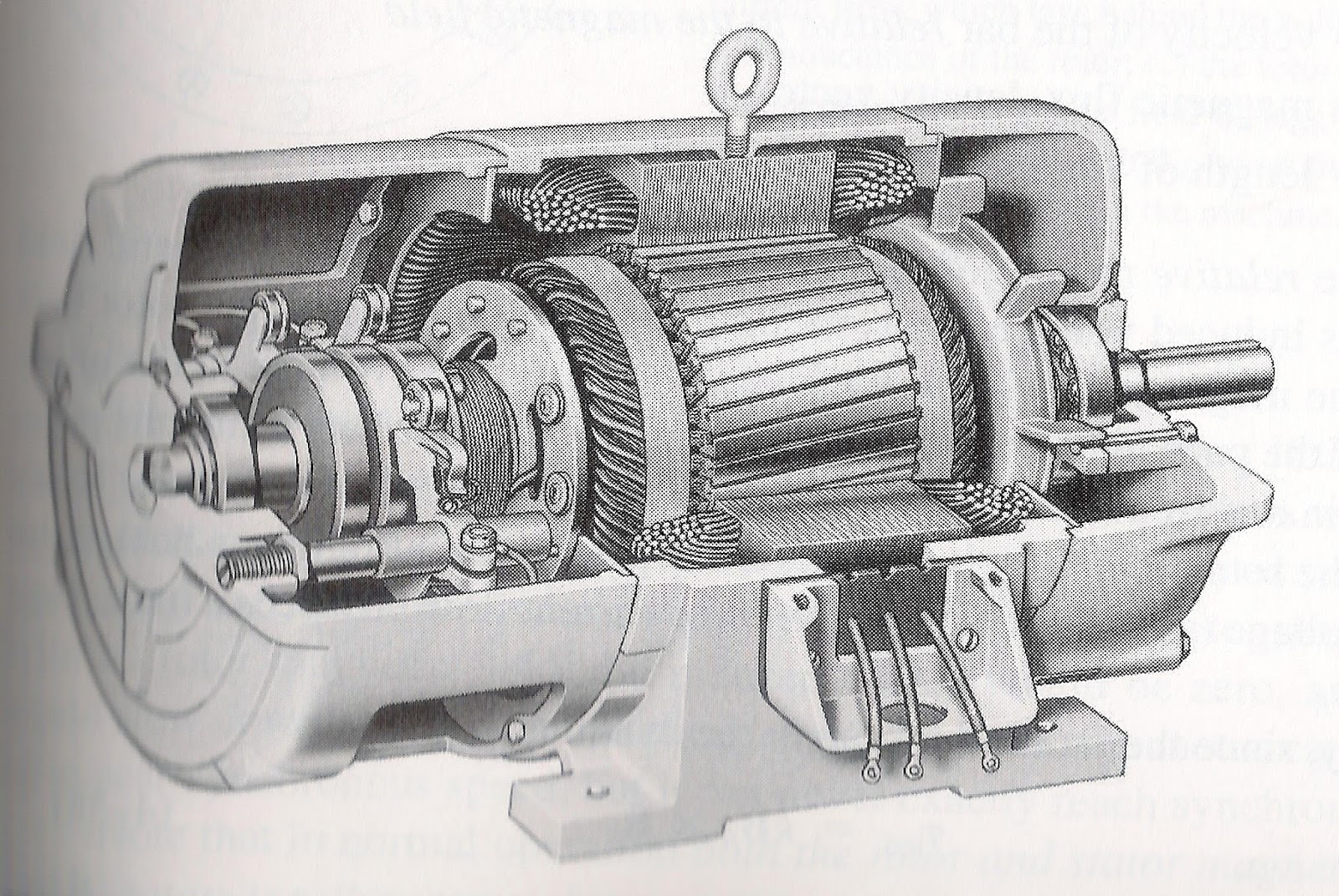
В этом разделе мы сначала обсудим один метод, который можно использовать для проанализировать симметричный двухфазный двигатель, работающий в несимметричном режиме условия. Затем мы формально выведем аналитическую модель несимметричного двухфазный двигатель, который может быть применен к однофазным двигателям в общем случае отключая как свои основные, так и вспомогательные обмотки.
4.1 Несбалансированная работа симметричных двухфазных машин; Симметричная составляющая Концепт
При работе только от основной обмотки однофазный двигатель крайний случай, когда двигатель работает в условиях несимметричного тока статора.В некоторых случаях в источнике питания возникают несимметричные напряжения или токи. сеть к двигателю, например, при перегорании линейного предохранителя. В остальных случаях несбалансированный напряжения создаются пусковыми сопротивлениями однофазных двигателей, как описано в разд. 2. Цель этого раздела — разработать Теория симметричных компонентов двухфазных асинхронных двигателей с двойным вращающимся полем концепция и показать, как теория может быть применена к множеству проблем с асинхронными двигателями, имеющими две обмотки статора в пространственной квадратуре
Сначала рассмотрим, что происходит при сбалансированных двухфазных напряжениях. применяются к выводам статора двухфазной машины, имеющей единый
воздушный зазор, симметричный многофазный или сепараторный ротор и два одинаковых статора
обмотки ot и fl в пространственной квадратуре. Токи статора равны в
по величине и во временной квадратуре.
применяются к выводам статора двухфазной машины, имеющей единый
воздушный зазор, симметричный многофазный или сепараторный ротор и два одинаковых статора
обмотки ot и fl в пространственной квадратуре. Токи статора равны в
по величине и во временной квадратуре.
Когда ток в обмотке ot достигает своего мгновенного максимума, ток
в обмотке fl равен нулю, а волна статора-ммс центрирована на оси
обмотка или.Точно так же волна статора-ммс центрируется на оси обмотки.
fl в момент, когда ток в обмотке fl равен мгновенному
максимум. Таким образом, волна статора-ммс распространяется на 90 электрических градусов в
пространство во временном интервале, соответствующем изменению фазы на 90 ° применяемого
напряжение, с направлением его движения в зависимости от чередования фаз
токов. Более полный анализ, как в разделе 4.5, показывает
что бегущая волна имеет постоянную амплитуду и постоянную угловую скорость.Этот факт, конечно же, является основой теории сбалансированной работы.
индукционных машин.
Поведение двигателя для сбалансированных двухфазных приложенных напряжений либо последовательность фаз может быть легко определена. Таким образом, если ротор вращается при скольжении s в направлении от обмотки альфа к обмотке r вывод полное сопротивление каждой фазы определяется эквивалентной схемой на фиг. 12а когда приложенное напряжение fz ~ отстает от подаваемого напряжения на 90 °.На протяжении в остальной части этого лечения эта фазовая последовательность называется положительной последовательностью и обозначается индексом ‘f’, поскольку токи прямой последовательности результат в поле вперед. Когда ротор работает с одинаковой скоростью и в том же направлении оконечный импеданс на фазу определяется эквивалентная схема фиг. 12b, когда выводы fz ~ запитаны на 90 °. Эта фаза последовательность называется отрицательной последовательностью и обозначается индексом ‘b’, поскольку токи обратной последовательности создают обратное поле.
РИС. 12 Однофазные схемы замещения двухфазного двигателя под
несбалансированные условия (а) прямое поле и (б) обратное поле.
РИС. 13 Синтез неуравновешенной двухфазной системы из суммы
две уравновешенные системы противофазной последовательности.
Предположим теперь, что два сбалансированных двухфазных источника напряжения противоположной фазы последовательность подключаются последовательно и применяются одновременно к двигателю, как показано на фиг.13а, где приложены векторные напряжения Vf и j Vf соответственно, к обмоткам ot и fl образуют сбалансированную систему прямой последовательности, а вектор напряжения «V’b и -j l? b образуют другую сбалансированную систему, но с отрицательным последовательность.
Результирующее напряжение V, ~, приложенное к обмотке ct, равно вектору
(уравнение 17)
… а применительно к обмотке fl …
(уравнение 18)
РИС. 13b показана обобщенная векторная диаграмма, на которой прямой или
В положительной последовательности система задается векторами ~ ‘r и j l ~’ r и
система обратной или отрицательной последовательности задается векторами ~ ‘b и -j
~ ‘б.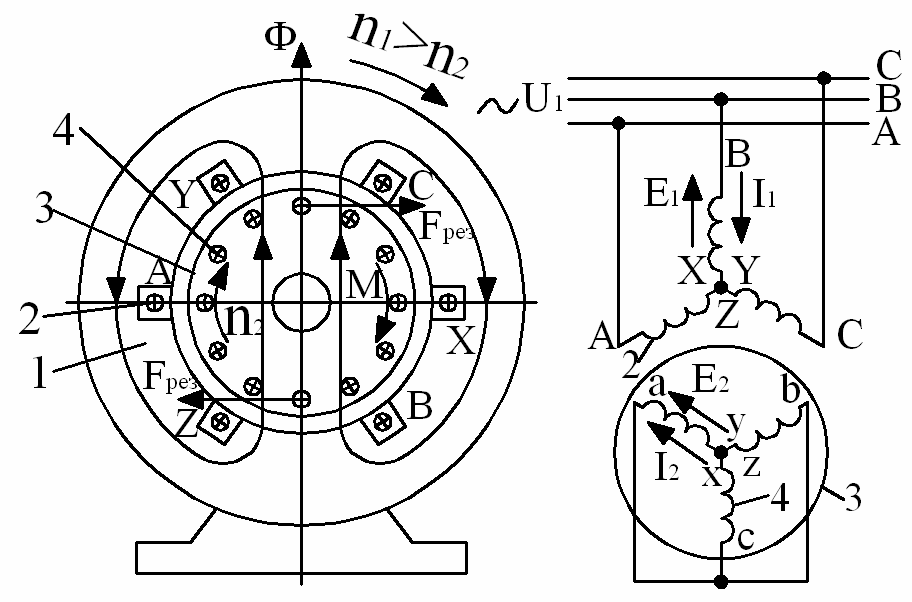 Результирующие напряжения, определяемые векторами 12 ~ и V / ~, не соответствуют
как правило, равные по величине или по квадратуре по времени. Из этого обсуждения
мы видим, что несбалансированная двухфазная система приложенных напряжений V ~ и V #
могут быть синтезированы путем объединения двух сбалансированных наборов напряжений противоположной фазы
последовательность.
Результирующие напряжения, определяемые векторами 12 ~ и V / ~, не соответствуют
как правило, равные по величине или по квадратуре по времени. Из этого обсуждения
мы видим, что несбалансированная двухфазная система приложенных напряжений V ~ и V #
могут быть синтезированы путем объединения двух сбалансированных наборов напряжений противоположной фазы
последовательность.
Однако с системами с симметричными компонентами работать намного проще. чем их несбалансированная результирующая система. Таким образом, легко вычислить составляющие токи, создаваемые каждой симметрично-компонентной системой применяемых напряжения, потому что асинхронный двигатель работает как сбалансированный двухфазный двигатель для каждой компонентной системы.
В результате наложения фактический ток в обмотке складывается из составные части. Таким образом, если if и Ib являются, соответственно, положительной и отрицательной последовательностями компонентных векторных токов в обмотке или, соответственно, положительного и векторные токи составляющей обратной последовательности в обмотке fl равны соответственно jif и -j ib, а фактические токи обмотки i ~ и i # равны
[. ..]
..]
РИС. 14 Разрешение несимметричных двухфазных напряжений на симметричные
составные части.
4,2 Общий случай: асимметричные двухфазные индукционные машины
Как мы уже говорили, однофазный асинхронный двигатель с основным и вспомогательным обмотка является примером несимметричного двухфазного асинхронного двигателя. В В этом разделе мы разработаем модель такого двухфазного двигателя, используя обозначения подходит для однофазного двигателя. Предположим, как обычно случай, когда обмотки находятся в пространственной квадратуре, но несимметричны в том, что они могут иметь разное количество витков, разное распределение обмоток, и так далее.
Наш аналитический подход заключается в представлении ротора эквивалентным двухфазным обмотка, как схематично показано на фиг. 16 и начать с потокосцепления / тока отношения для ротора и статора формы
(уравнение 25)
, где 0me — угол ротора, измеренный в электрических радианах.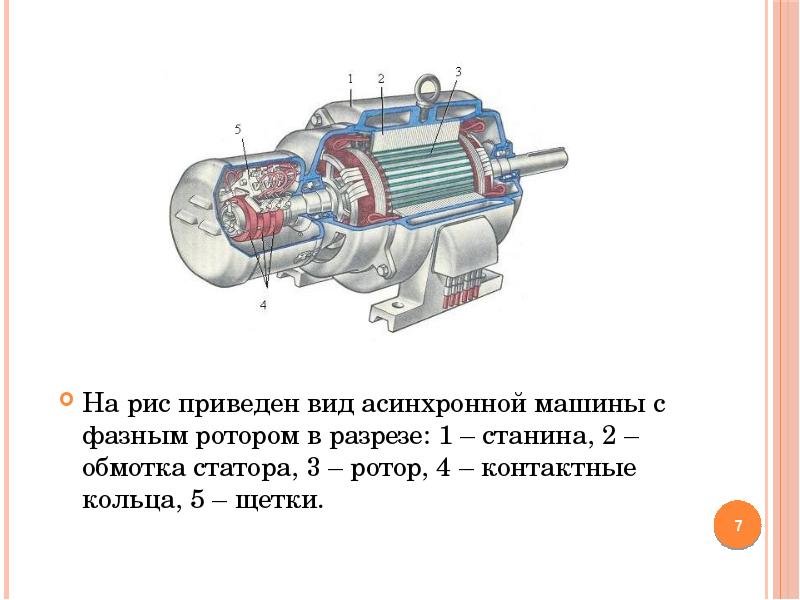
Lmain = Самоиндукция основной обмотки
РИС. 16 Схематическое изображение двухфазного асинхронного двигателя с эквивалентный двухфазный ротор.
[…]
5. РЕЗЮМЕ
Одна из тем этого раздела — продолжение теории индукционных машин.
раздела 6 и его применение к однофазному асинхронному двигателю. Этот
теория расширяется за счет пошагового процесса рассуждений от простого вращающегося поля
теория симметричного многофазного асинхронного двигателя. Основная концепция
разрешение статорной ММЧ-волны на два бегущих с постоянной амплитудой
волны, вращающиеся вокруг воздушного зазора с синхронной скоростью в противоположных направлениях.Если смещение для переднего поля равно s, то для заднего поля
равно (2 с). Каждое из этих составляющих полей вызывает действие асинхронного двигателя,
как в симметричном многофазном двигателе. С точки зрения статора,
отраженные эффекты ротора можно визуализировать и выразить количественно
в терминах простых эквивалентных схем. Легкость, с которой внутреннее
реакции могут быть объяснены таким образом, является существенной причиной
полезность теории двойного вращающегося поля.
Легкость, с которой внутреннее
реакции могут быть объяснены таким образом, является существенной причиной
полезность теории двойного вращающегося поля.
Для однофазной обмотки прямая и обратная составляющие ММЧ-волн равны, а их амплитуда составляет половину максимального значения пика стационарный пульсирующий ММФ, создаваемый обмоткой. Разрешение статор mmf на его переднюю и заднюю компоненты затем приводит к физическая концепция однофазного двигателя описана в разд. 1 и наконец, к количественной теории, развитой в разд. 3 и эквивалент схемы фиг.11.
В большинстве случаев однофазные асинхронные двигатели на самом деле являются двухфазными двигателями.
с несимметричными обмотками, питаемыми от однофазного источника. Таким образом
чтобы завершить наше понимание однофазных асинхронных двигателей, необходимо
исследовать производительность двухфазных двигателей. Следовательно, следующий шаг —
применение изображения двойного вращающегося поля к симметричной двухфазной
двигатель с несимметричным приложенным напряжением, как в разд. 4.1. Это расследование
приводит к концепции симметричных компонентов, согласно которой несбалансированная двухфазная
систему токов или напряжений можно разложить на сумму двух уравновешенных
двухфазные компонентные системы противофазной последовательности.Разрешение
токи в системы с симметричными компонентами эквивалентно разрешению
волна статора-ммс на его прямую и обратную составляющие и, следовательно,
внутренние реакции ротора для каждой симметрично-компонентной системы
такие же, как те, которые мы уже исследовали. Очень похожий
процесс рассуждений, не рассматриваемый здесь, приводит к хорошо известному трехфазному
симметрично-компонентный метод решения проблем с несбалансированными
работа трехфазных вращающихся машин.Легкость, с которой вращается
машина может быть проанализирована с точки зрения теории вращающегося поля.
причина полезности метода симметричных компонентов.
4.1. Это расследование
приводит к концепции симметричных компонентов, согласно которой несбалансированная двухфазная
систему токов или напряжений можно разложить на сумму двух уравновешенных
двухфазные компонентные системы противофазной последовательности.Разрешение
токи в системы с симметричными компонентами эквивалентно разрешению
волна статора-ммс на его прямую и обратную составляющие и, следовательно,
внутренние реакции ротора для каждой симметрично-компонентной системы
такие же, как те, которые мы уже исследовали. Очень похожий
процесс рассуждений, не рассматриваемый здесь, приводит к хорошо известному трехфазному
симметрично-компонентный метод решения проблем с несбалансированными
работа трехфазных вращающихся машин.Легкость, с которой вращается
машина может быть проанализирована с точки зрения теории вращающегося поля.
причина полезности метода симметричных компонентов.
Наконец, раздел заканчивается на Разд. 4.2 с развитием аналитического
теория для общего случая двухфазного асинхронного двигателя с несимметричным
обмотки.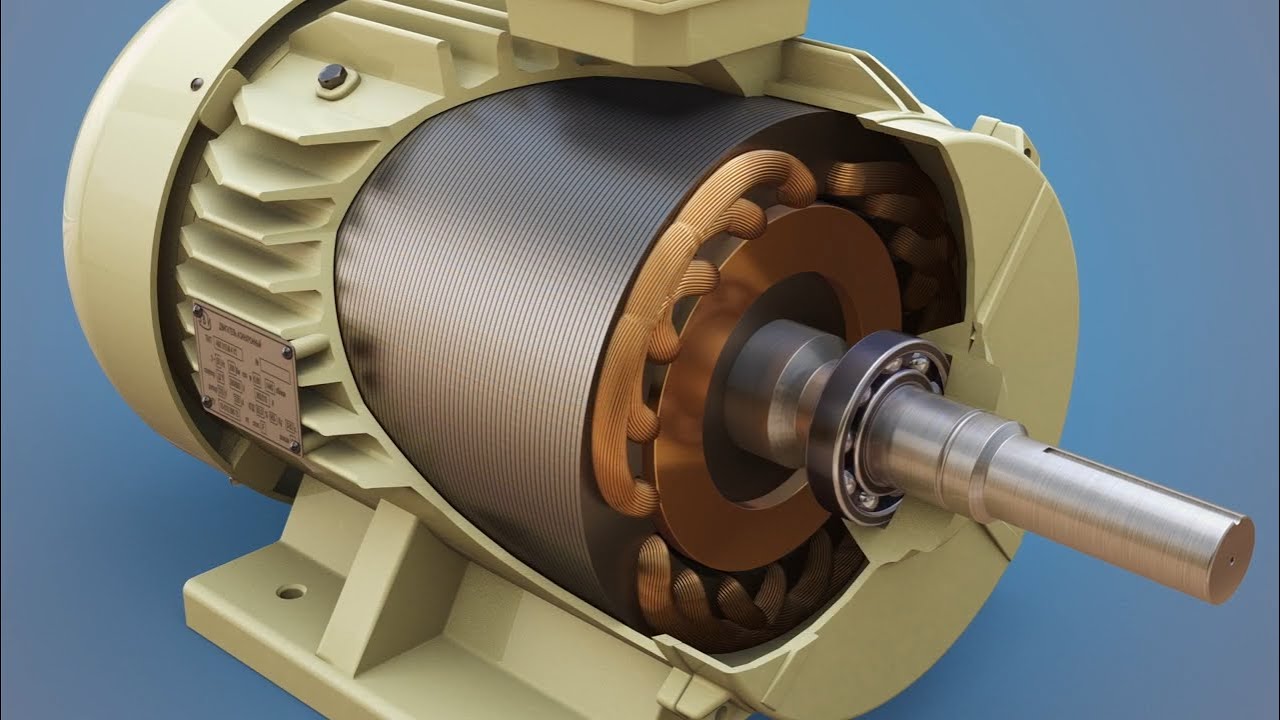 Эта теория позволяет анализировать работу однофазных
двигатели, работающие от основной и вспомогательной обмоток.
Эта теория позволяет анализировать работу однофазных
двигатели, работающие от основной и вспомогательной обмоток.
6. ВИКТОРИНА
Двигатель с конденсаторным пуском, 1 кВт, 120 В, 60 Гц, имеет следующие параметры для основной и вспомогательной обмоток (при пуске):
Zmain = 4.82 + j7.25 Zau x —7.95 + j9.21 Ом основная обмотка вспомогательная обмотка
а. Найдите величину и фазовые углы токов в двух обмотках. когда на двигатель подается номинальное напряжение в пусковых условиях.
г. Найдите значение пусковой емкости, при которой будут размещены основные и токи вспомогательной обмотки во временной квадратуре при пуске.
г. Повторите часть (a), когда емкость части (b) вставлена последовательно. со вспомогательной обмоткой.
2. Повторите задачу 1, если двигатель работает от источника 120 В, 50 Гц.
3. Учитывая приложенную электрическую частоту и соответствующие импедансы
Zmain и Zaux основной и вспомогательной обмоток при пуске пишем
сценарий MATLAB для вычисления значения емкости, которая при подключении
последовательно с пусковой обмоткой, образует пусковую обмотку
ток, который опережает ток основной обмотки на 90 °.
4. Повторить пример 2 для скольжения 0,045.
5. Однофазный асинхронный двигатель мощностью 500 Вт, 115 В, 60 Гц имеет следующие параметры (сопротивления и реактивные сопротивления в Ом / фаза):
R1, основной = 1,68 R2, основной = 2,96
X1, основной ~ -1,87 Xm, основной = 60,6 X2, основной = 1,72
Потери в сердечнике = 38 Вт
Трение и ветер = 11,8 Вт
Найдите частоту вращения статора ток, крутящий момент, выходная мощность и эффективность при работе двигателя при номинальном напряжении и скольжении 4.2 процента.
6. Напишите сценарий MATLAB для построения графиков скорости и эффективности.
однофазного двигателя задачи 5 в зависимости от выходной мощности
в диапазоне 0 7. В состоянии покоя среднеквадратичные токи
в основной и вспомогательной обмотках четырехполюсного, конденсаторно-пускового
асинхронный двигатель: / main = 20,7 A и laux = 11,1 A соответственно. В
ток вспомогательной обмотки опережает ток основной обмотки на 53 °. а. Определите пиковые амплитуды переднего и заднего статора-ммс
волны. г. Предположим, можно было отрегулировать величину и фазу вспомогательной обмотки.
Текущий. Какая величина и фаза будут производить чисто прямую волну ммф?
9.8 Выведите выражение через a2, главное для ненулевой скорости
однофазный асинхронный двигатель, у которого внутренний крутящий момент равен нулю.(Видеть
Пример 2.) 9. Параметры схемы замещения 8 кВт, 230 В, 60 Гц,
четырехполюсный, двухфазный асинхронный двигатель с короткозамкнутым ротором, Ом на фазу
являются Rl = 0,253 Xl = 1,14 Xm = 32,7 R2 = 0,446 X2 = 1,30 Этот двигатель
работает от несимметричного двухфазного источника 60 Гц, фазные напряжения которого
составляют, соответственно, 223 и 190 В, чем меньше напряжение, тем больше
на 73 °. Для бланка 0,045 найдите: а. г.внутренняя механическая сила. 10. Рассмотрим двухфазный двигатель из Примера 3. а. Найдите пусковой момент для условий, указанных в примере. г. Сравните результат части (а) с пусковым моментом, который двигатель
будет производить, если 220-В, сбалансированные двухфазные напряжения будут приложены к
мотор. г. Покажите, что если напряжения статора f ‘~ и V_beta двухфазной индукции
электродвигатели находятся во временном квадратуре, но не равны по величине, пусковой момент
такое же, как и при сбалансированных двухфазных напряжениях величины
v / V ~ V ~ применяются. 11. Асинхронный двигатель задачи 9 питается от неуравновешенного
двухфазный источник с четырехпроводным механизмом подачи с импедансом Z = 0,32 +
j 1,5 Ом / фаза. Напряжения источника можно выразить как fe d -235L0 ° f ‘~
= 212/78 ° Для скольжения 5 процентов покажите, что клемма асинхронного двигателя
напряжения больше соответствуют сбалансированному двухфазному набору, чем те
источника. 12. Параметры эквивалентной схемы в омах на фазу, относящиеся к
статор для двухфазного, 1.0 кВт, 220 В, четырехполюсный, 60 Гц, беличья клетка
асинхронные двигатели приведены ниже. Потеря вращения без нагрузки составляет 65 Вт. R1
= 0,78 R2 = 4,2 X1 = X2 = 5,3 Xm = 93 а. Напряжение, приложенное к фазе c ~, составляет 220L0 ° В, а напряжение, приложенное к фазе / 3.
составляет 220L65 ° V. Найдите чистый крутящий момент в воздушном зазоре при скольжении s = 0,035. г. Каков начальный крутящий момент при приложенных напряжениях части (а)? г. Приложенные напряжения регулируются так, чтобы f ‘~ 220L65 ° V и f’t ~
-220L90 ° В. Полная нагрузка на машину возникает при s = 0,048. На каком скольжении максимально
возникает внутренний крутящий момент? Какое значение максимального крутящего момента? г. Пока двигатель работает, как в части (c), фаза fl разомкнута.
Какова выходная мощность машины при скольжении s = 0,04? e. Какое напряжение появляется на разомкнутых клеммах фазы-fl в условиях
части (d)? 13. Rmain = 0,38 Laux = 102 мГн Raux -1,78 Ом Lr = 2,35 / zH Rr = 17,2 / Ом Lmain, r -0,342 мH Laux, r = 0,530 м вод. Ст. Вы можете предположить, что у двигателя 48 Вт потерь в сердечнике и 23 Вт вращательного
убытки. Обмотки двигателя подключены с полярностью, показанной на фиг. 17 с рабочим конденсатором 40 #F. а. Рассчитайте пусковой крутящий момент двигателя. Если двигатель работает со скоростью 3490 об / мин, рассчитайте г.токи основной и вспомогательной обмоток, г. общий сетевой ток и коэффициент мощности двигателя, г. выходная мощность и e. входная электрическая мощность и КПД. Обратите внимание, что эту проблему проще всего решить с помощью MATLAB. 14. Рассмотрим однофазный двигатель задачи 13. Напишите сценарий MATLAB. 15. Для увеличения пускового момента используется однофазная индукционная
двигатель задачи 13 должен быть преобразован в конденсаторный пуск, конденсаторный
мотор. Напишите сценарий MATLAB, чтобы найти минимальное значение пусковой емкости
требуется для увеличения пускового момента до 0,5 Н-м. 16. Рассмотрим однофазный асинхронный двигатель из Примера 5, работающий
в диапазоне скоростей от 3350 до 3580 об / мин. а. Используйте MATLAB для построения графика выходной мощности в заданном диапазоне скоростей. г. Постройте график КПД двигателя в этом диапазоне скоростей. г. На том же графике, что и в части (b), постройте КПД двигателя, если
Рабочий конденсатор увеличен до 45 мкФ. NEETS Модуль 5 — Введение в генераторы и двигатели Страницы i — ix,
От 1-1 до 1-10,
С 1-11 по 1-20,
1-21 до 1-30,
1-31 к 1-34,
От 2-1 до 2-10,
2-11 до 2-16,
С 3-1 по 3-10,
С 3-11 по 3-22,
С 4-1 по 4-10,
С 4-11 по 4-18, индекс ЦЕЛИ ОБУЧЕНИЯ ВВЕДЕНИЕ 4-1 В этой главе двигатели переменного тока будут разделены на (1) серийные, (2) синхронные и (3) асинхронные двигатели.
Будут рассмотрены однофазные и многофазные двигатели. Синхронные двигатели для целей данной главы могут быть
рассматриваются как многофазные двигатели постоянной скорости, роторы которых находятся под напряжением постоянного тока. Асинхронные двигатели,
Однофазные или многофазные, роторы которых приводятся в действие за счет индукции, являются наиболее часто используемыми двигателями переменного тока.В
Серийный двигатель переменного тока, в некотором смысле, является знакомым типом двигателя. Он очень похож на двигатель постоянного тока, который был покрыт
глава 2 и будет служить мостом между старым и новым. ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА СЕРИИ Серийный двигатель переменного тока электрически такой же, как и двигатель постоянного тока. См. Рисунок 4-1 и используйте левую
правило полярности катушек.Вы можете видеть, что мгновенные магнитные полярности якоря и поля
противостоят друг другу, и результат двигательного действия. Теперь измените ток, изменив полярность входа. Примечание
что магнитная полярность поля все еще противоположна магнитной полярности якоря. Это потому, что разворот
влияет как на арматуру, так и на поле. Вход переменного тока заставляет эти изменения происходить постоянно. Рисунок 4-1.- Мотор переменного тока серии. 4-2 выс. Серийные двигатели используются для привода вентиляторов, электродрелей и другой мелкой бытовой техники. Поскольку
Серийный двигатель переменного тока имеет те же общие характеристики, что и серийный двигатель постоянного тока, был разработан серийный двигатель, который
может работать как от переменного, так и от постоянного тока. Этот двигатель переменного / постоянного тока называется универсальным двигателем.Он находит широкое применение в небольших электрических
бытовая техника. Универсальные двигатели работают с меньшим КПД, чем двигатели постоянного или переменного тока. Они встроены в
только небольшие размеры. Универсальные двигатели не работают от многофазного переменного тока. ВРАЩАЮЩИЕСЯ МАГНИТНЫЕ ПОЛЯ Принцип вращения магнитных полей является ключом к работе большинства двигателей переменного тока.И синхронные, и
Двигатели асинхронного типа используют вращающиеся магнитные поля в статорах, которые заставляют их роторы вращаться. 4-3 Рисунок 4-2. — Двухфазный статор двигателя. 4-4 Рисунок 4-3.- Двухфазное вращающееся поле. 4-5 ТРЕХФАЗНЫЕ ВРАЩАЮЩИЕСЯ ПОЛЯ Рисунок 4-4. — Трехфазный статор с Y-соединением. 4-6 Рисунок 4-5. — Полярность трехфазного вращающегося поля и входные напряжения. 4-7 продолжает существовать. Вал, проходящий через точку поворота стержневого магнита, будет вращаться с тем же
скорость как вращающееся поле.Эта скорость называется синхронной скоростью. Вал представляет собой вал
рабочий двигатель, к которому прикреплена нагрузка. СИНХРОННЫЕ ДВИГАТЕЛИ Рисунок 4-6. — Синхронный двигатель с вращающимся полем. 4-8 вместе медными кольцами. В этих закороченных обмотках возникает низкое напряжение из-за вращения
трехфазное поле статора. Из-за короткого замыкания в беличьей клетке протекает относительно большой ток.Это вызывает магнитное поле, которое взаимодействует с вращающимся полем статора. Из-за взаимодействия
ротор начинает вращаться вслед за полем статора; мотор запускается. Мы снова наткнёмся на беличьи клетки в других
приложения, где они будут рассмотрены более подробно. Рисунок 4-7. — Самозапускающийся синхронный двигатель переменного тока. ИНДУКЦИОННЫЕ ДВИГАТЕЛИ 4-9 тяжелые медные шины, соединенные на каждом конце металлическим кольцом из меди или латуни.Нет
требуется изоляция между сердечником и стержнями. Это связано с очень низкими напряжениями, возникающими в
штанги ротора. Другой тип обмотки содержит настоящие катушки, размещенные в пазах ротора. Тогда ротор называется
намотанный ротор. Рисунок 4-8. — Индукционный двигатель. Рисунок 4-9. — Типы роторов асинхронных двигателей переменного тока. 4-10 NEETS Содержание Большинство двигателей переменного тока являются асинхронными.Асинхронные двигатели предпочитают из-за их прочности и простоты. Фактически, 90% промышленных двигателей являются асинхронными. Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов. Самыми большими (> 1 л.с. или 1 кВт) промышленными двигателями являются многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на каждый полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени. На практике это две или три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы имеем в виду, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока с коллектором. Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже.Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году. Многофазный асинхронный двигатель Тесла Статор на рисунке выше намотан парами катушек, соответствующих фазам доступной электрической энергии. Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита.То есть одна катушка соответствует N-полюсу, а другая — S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре. Эта пара катушек подключена к переменному току со сдвигом во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока. Статор на рисунке выше имеет выступающих полюсов, явно выступающих, как в ранних асинхронных двигателях Tesla. Эта конструкция используется по сей день для двигателей с малой мощностью (<50 Вт).Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД достигается, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже). Рама статора с пазами для обмоток Пластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали. Пакет из них закреплен концевыми винтами, которые также могут удерживать концевые корпуса. Статор с обмотками 2 φ (а) и 3 φ (б) На приведенном выше рисунке обмотки двухфазного и трехфазного двигателей установлены в пазы статора.Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и пазом, защищает от истирания. Фактические обмотки статора сложнее, чем отдельные обмотки на полюс на рисунке выше. Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с явными полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше. Эта группа называется фазовой лентой (см. Рисунок ниже).Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя. В пазах на краю стойки может быть меньше витков, чем в других пазах. Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются. Ключом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже).Ротор состоит из вала, стального пластинчатого ротора и встроенной медной или алюминиевой беличьей клетки , показанной в (b), снятой с ротора. По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора. Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, снятой с ротора Проводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала.Несоосность пазов статора снижает пульсации крутящего момента. Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран из соображений низких гистерезисных потерь. Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор. Теория работы асинхронных двигателей основана на вращающемся магнитном поле. Один из способов создания вращающегося магнитного поля — вращать постоянный магнит. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске. Этот электрический ток создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца . Полярность электромагнита такова, что он притягивается к постоянному магниту. Диск следует с немного меньшей скоростью, чем постоянный магнит. Вращающееся магнитное поле создает крутящий момент в проводящем диске Крутящий момент, развиваемый диском, пропорционален количеству силовых линий, разрезающих диск, и скорости, с которой он разрезает диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента. Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом. Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, на которую диск отстает от вращающегося магнита. Большее скольжение соответствует большему потоку, разрезающему проводящий диск, создавая больший крутящий момент. Аналоговый автомобильный вихретоковый спидометр основан на принципе, показанном выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, и приводится в действие токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах. В противофазе (90 °) синусоидальные волны образуют круговой узор Лиссажу На приведенном выше рисунке круговой контур Лиссажу создается путем подачи на входы осциллографа горизонтального и вертикального сдвига по фазе синусоидальных волн на 90 °.Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b). Между (a) и (b) две формы волны равны 0,707 Впик при 45 °. Эта точка (0,707, 0,707) попадает на радиус окружности между (a) и (b). След перемещается в (b) с минимальным отклонением «X» и максимальным отклонением «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след перемещается в (c). Затем с минимальным «X» и максимальным отрицательным «Y» он переходит к (d) и обратно к (a), завершая один цикл. Окружность синуса по оси X и косинуса по оси Y На рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве. Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двухмерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки. Для справки на рисунке ниже показано, почему синфазные синусоидальные волны не образуют круговой диаграммы.Равное отклонение «X» и «Y» перемещает освещенное пятно от исходной точки в (a) вверх вправо (1,1) в (b), назад вниз влево к исходной точке в (c), вниз влево до (-1 .-1) в точке (d) и обратно в исходное положение. Линия получается равными прогибами по обеим осям; y = x — прямая линия. Нет кругового движения от синфазных сигналов Если пара синусоидальных волн, сдвинутых на 90 ° по фазе, создает круговую форму Лиссажу, аналогичная пара токов должна быть способна создавать круговое вращающееся магнитное поле.Так обстоит дело с двухфазным двигателем. По аналогии, три обмотки, расположенные в пространстве на 120 ° друг от друга и питаемые соответствующими фазированными токами 120 °, также будут создавать вращающееся магнитное поле. Вращающееся магнитное поле синусоидальной волны, фазированной под углом 90 ° По мере того, как синусоидальные волны, фазированные под углом 90 °, на рисунке выше, развиваются от точек (a) до (d), магнитное поле вращается против часовой стрелки (рисунки a-d) следующим образом: Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора.На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов. Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел.Если мы удвоим количество полюсов двигателя, синхронная скорость сократится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны. Удвоение полюсов статора уменьшает синхронную скорость вдвое Синхронная скорость определяется по формуле: Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, тащит за собой ротор. Более подробное и более правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют вторичную обмотку трансформатора. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результатом является вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью. Однако скольжение между ротором и полем статора синхронной скорости развивает крутящий момент. Магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке. Если бы ротор работал с синхронной скоростью, не было бы потока статора, разрезающего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента. При первой подаче питания на двигатель ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N с . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети. По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N с и фактической скоростью ротора N, или (N с — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение : Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по: Скольжение при 100% крутящем моменте обычно составляет 5% или менее в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе fr = 0,05 · 50 = 2,5 Гц. Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц. Скорость ротора на 5% меньше. Вращающееся магнитное поле разрезает ротор только на 2.5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, поток вообще не будет резать ротор, f r = 0. Крутящий момент и скорость в зависимости от% скольжения. % N с =% синхронной скорости На рисунке выше показано, что пусковой момент, известный как крутящий момент при заторможенном роторе (LRT), превышает 100% крутящего момента при полной нагрузке (FLT), безопасного продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от FLT для приведенного выше примера двигателя. Пусковой ток, известный как , ток заторможенного ротора (LRC) составляет 500% от тока полной нагрузки (FLC), безопасного рабочего тока. Сила тока велика, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . Это наименьшее значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот пробивной крутящий момент происходит из-за большего, чем обычно, 20% скольжения. Сила тока на этом этапе снизилась лишь незначительно, но после этой точки будет быстро уменьшаться. По мере того как ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя. Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это состояние аналогично разомкнутому вторичному трансформатору. Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от приведенной выше кривой крутящего момента.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (LRT) для двигателей различных конструкций и размеров находится в диапазоне от 60% до 350% момента полной нагрузки (FLT). Пусковой ток или ток заторможенного ротора (LRC) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (FLC). Этот потребляемый ток может стать проблемой при запуске больших асинхронных двигателей. Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам. Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно. Характеристики для проектов NEMA Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке. Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии питания. Коэффициент мощности в больших полностью нагруженных высокоскоростных двигателях может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки наибольший коэффициент мощности высокоскоростного двигателя может составлять 92%. Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности.Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности. Коэффициент мощности и КПД асинхронного двигателя Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низка, потому что большая часть тока связана с поддержанием намагничивающего потока. По мере увеличения нагрузки крутящего момента больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. КПД снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится плохой только ниже 25% FLT.Изменение эффективности в зависимости от нагрузки показано на рисунке выше. , как правило, имеют завышенные размеры, чтобы гарантировать возможность запуска и привода их механической нагрузки в любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT. Фрэнк Нола из НАСА предложил в конце 1970-х годов корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей.Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, в частично загруженных двигателях, в частности в двигателях 1-φ, можно сэкономить энергию. Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки. Хотя в полностью загруженном двигателе экономить нечего, напряжение частично загруженного двигателя может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это увеличит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась. Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT. Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT — это разница в эффективности 95% — 90% = 5%.Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу. Срок окупаемости дорогостоящего электронного контроллера оценивается как непривлекательный для большинства приложений. Хотя он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости. Асинхронный двигатель может работать как генератор переменного тока, если он приводится в действие крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже).Это соответствует нескольким% «отрицательного» скольжения, скажем -1%. Это означает, что поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор движется на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%. Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, возвращая электрическую энергию обратно в линию питания. Отрицательный момент превращает асинхронный двигатель в генератор Такой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц.В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора переменного тока не подходит в качестве резервного источника питания. В качестве вспомогательного ветряного генератора он имеет то преимущество, что не требует автоматического выключателя отключения питания для защиты ремонтных бригад. Он отказоустойчив. Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток. Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор. В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов. Процедура запуска заключается в доведении ветряной турбины до скорости в моторном режиме путем подачи на статор нормального напряжения линии электропередачи.Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередач, изменяя нормальное направление электрического счетчика киловатт-часов. В то время как асинхронный двигатель представляет отстающий коэффициент мощности по отношению к линии электропередачи, асинхронный генератор переменного тока имеет ведущий коэффициент мощности. Индукционные генераторы не используются широко на обычных электростанциях. Скорость привода паровой турбины постоянна и регулируется в соответствии с требованиями синхронных генераторов переменного тока.Синхронные генераторы также более эффективны. Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного скольжения. Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор. Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока). Несколько генераторов или несколько обмоток на общем валу можно переключать для обеспечения высокой и низкой скорости, чтобы приспособиться к переменным ветровым условиям. Некоторые асинхронные двигатели могут потреблять более 1000% тока полной нагрузки во время запуска; хотя более распространено несколько сотен процентов. Небольшие двигатели мощностью в несколько киловатт или меньше могут запускаться путем прямого подключения к сети. Запуск больших двигателей может вызвать провал напряжения в сети, что повлияет на другие нагрузки.Автоматические выключатели, рассчитанные на запуск двигателя (аналогичные плавким предохранителям с задержкой срабатывания), должны заменить стандартные автоматические выключатели для пусковых двигателей мощностью в несколько киловатт. Этот выключатель допускает перегрузку по току во время пуска. Пускатель асинхронного двигателя автотрансформатора мощностью более 50 кВт используются пускатели двигателей для снижения линейного тока с нескольких сотен до нескольких сотен процентов от тока полной нагрузки. Автотрансформатор, работающий в прерывистом режиме, может снизить напряжение статора на долю минуты в течение интервала пуска с последующим приложением полного линейного напряжения, как показано на рисунке выше. Замыкание контактов S приводит к пониженному напряжению в течение интервала запуска. Контакты S размыкаются, а контакты R замыкаются после запуска. Это снижает пусковой ток, скажем, до 200% от тока полной нагрузки. Поскольку автотрансформатор используется только в течение короткого интервала пуска, его размеры могут быть значительно меньше, чем у агрегата непрерывного режима. Трехфазные двигатели будут работать от однофазных так же легко, как и однофазные двигатели.Единственная проблема для любого двигателя — запуск. Иногда 3-фазные двигатели приобретаются для использования на однофазных, если предполагается трехфазное питание. Номинальная мощность должна быть на 50% больше, чем у сопоставимого однофазного двигателя, чтобы компенсировать одну неиспользуемую обмотку. Однофазное напряжение подается на пару обмоток одновременно с пусковым конденсатором, включенным последовательно с третьей обмоткой. Пусковой выключатель размыкается на рисунке ниже при запуске двигателя. Иногда во время работы остается конденсатор меньшего размера, чем пусковой. Пуск трехфазного двигателя от однофазного Схема на приведенном выше рисунке для работы трехфазного двигателя от однофазного двигателя известна как статический преобразователь фазы , если вал двигателя не нагружен. Кроме того, двигатель работает как трехфазный генератор. Трехфазное питание может быть отключено от трех обмоток статора для питания другого трехфазного оборудования. Конденсатор подает фазу синтетический примерно на полпути 90 ° между выводами однофазного источника питания 180 ° для запуска. Во время работы двигатель генерирует приблизительно стандартные 3-φ, как показано выше. Мэтт Иссерштедт демонстрирует полную схему питания домашней механической мастерской. Статический преобразователь фазы самозапускающийся. Рабочий конденсатор = 25-30 мкФ на HP. Взято из рисунка 7, Hanrahan Поскольку статический преобразователь фазы не имеет нагрузки по крутящему моменту, он может быть запущен с конденсатором значительно меньшего размера, чем обычный пусковой конденсатор. Если он достаточно мал, его можно оставить в цепи в качестве рабочего конденсатора (см. Рисунок выше). Однако меньшие рабочие конденсаторы обеспечивают лучшую выходную трехфазную мощность. Более того, регулировка этих конденсаторов для выравнивания токов, измеренных в трех фазах, позволяет получить наиболее эффективную машину. Однако для быстрого запуска преобразователя требуется большой пусковой конденсатор примерно на секунду. Ханрахан представляет детали конструкции. Более эффективный статический преобразователь фазы. Пусковой конденсатор = 50-100 мкФ / л.с. Рабочие конденсаторы = 12-16 мкФ / л.с.Взято из рисунка 1, Hanrahan могут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин. Подать питание на одно поле или другое менее сложно, чем перемонтировать катушки статора. Несколько полей позволяют изменять скорость Если поле сегментировано с выведенными выводами, его можно изменить (или переключить) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя.Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеуказанного двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин. Q: Если двигатель приводится в действие с частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости? А: Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный для нагрузки, что снижает скорость (см. Рисунок ниже). Регулятор переменного напряжения, скорость асинхронного двигателя Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя частоту сети 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора. Это может привести к насыщению магнитной цепи статора с катастрофическими результатами. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты. Электронный частотно-регулируемый привод И наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличивать напряжение, чтобы преодолеть увеличение реактивного сопротивления, чтобы поддерживать ток на нормальном уровне и поддерживать крутящий момент. Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией. Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени «включения» соответствует мгновенному напряжению синусоидальной волны. Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простых до сложных: Обмотанный статор и ротор с короткозамкнутым ротором асинхронного двигателя можно разрезать по окружности и развернуть в линейный асинхронный двигатель.Направление линейного перемещения регулируется последовательностью привода фаз статора. Линейный асинхронный двигатель предложен в качестве привода высокоскоростных пассажирских поездов. До этого момента линейный асинхронный двигатель с соответствующей системой левитации с магнитным отталкиванием, необходимой для плавной езды, был слишком дорогим для всех, кроме экспериментальных установок. Тем не менее, линейный асинхронный двигатель должен заменить катапульты с паровым двигателем на новом поколении военно-морского авианосца CVNX-1 в 2013 году.Это повысит эффективность и сократит потребность в обслуживании. СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ: 14 На рисунке 6.6.b показана экспериментальная временная кривая скорости двухфазного асинхронного двигателя во время предыдущей операции отслеживания положения . 00,5 11,5 22,5 33,5 0 200 400 600 800 1000 1200 фактическое и исходное положение (градусы) время (сек) исходное положение позиция Рис.6.7.a Экспериментальное ступенчатое изменение отслеживания положения 00,5 11,5 22,5 33,5 -15 -10 -5 0 5 10 15 фактическая скорость (об / мин4) В
число эффективных оборотов на полюс (т.е., количество витков с поправкой на
эффекты распределения обмоток) N_main -42 и N_aux = 68. Обмотки
находятся в космической квадратуре.
В
число эффективных оборотов на полюс (т.е., количество витков с поправкой на
эффекты распределения обмоток) N_main -42 и N_aux = 68. Обмотки
находятся в космической квадратуре.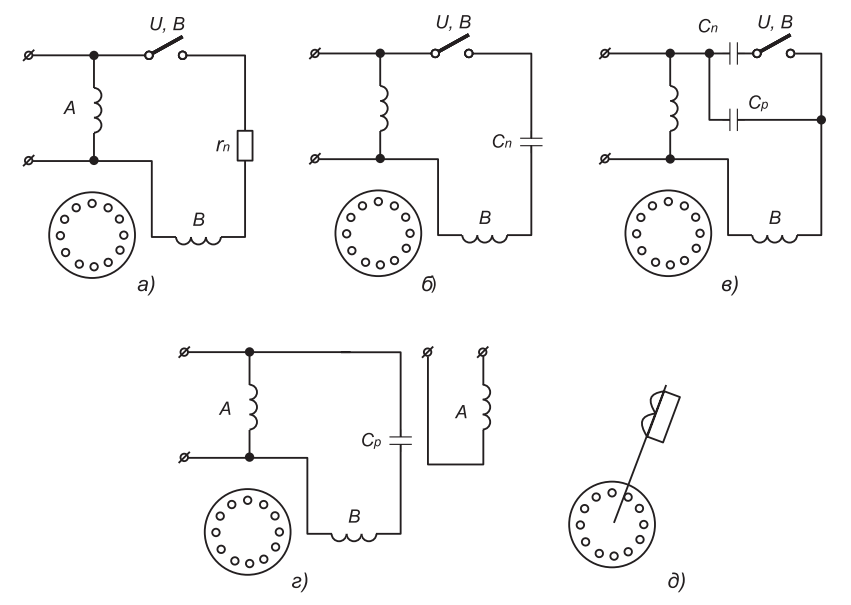 фазные токи в каждой из обмоток и
фазные токи в каждой из обмоток и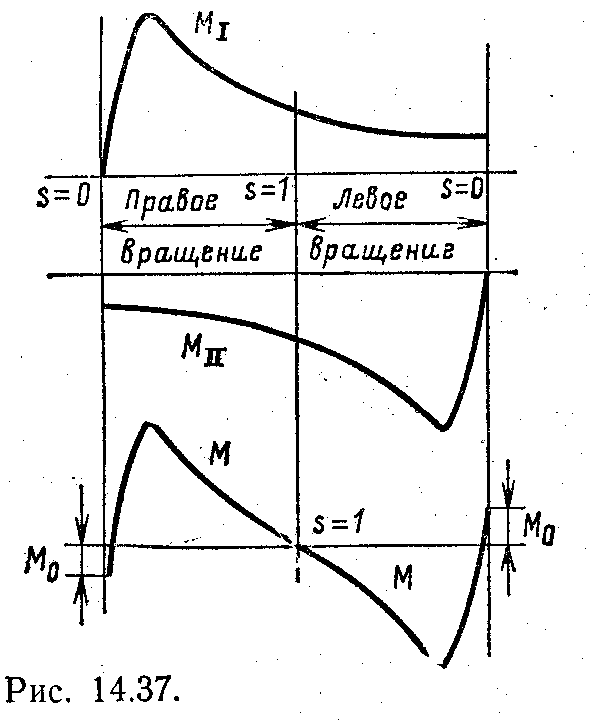
 А 120 В, 60 Гц, конденсаторный, двухполюсный, однофазный
асинхронный двигатель имеет следующие параметры: Lmain = 47.2 мГн
А 120 В, 60 Гц, конденсаторный, двухполюсный, однофазный
асинхронный двигатель имеет следующие параметры: Lmain = 47.2 мГн для поиска в диапазоне емкостей конденсаторов от 25 мкФ до 75 мкФ найти
значение, которое максимизирует КПД двигателя при скорости двигателя
3490 об / мин.Каков соответствующий максимальный КПД?
для поиска в диапазоне емкостей конденсаторов от 25 мкФ до 75 мкФ найти
значение, которое максимизирует КПД двигателя при скорости двигателя
3490 об / мин.Каков соответствующий максимальный КПД? Серия тренингов по электричеству и электронике ВМС (NEETS), модуль 5, с 4-1 по 4-10
ГЛАВА 4
ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
По завершении этой главы вы сможете:
1.Перечислите три основных типа двигателей переменного тока
и опишите характеристики каждого типа.
2. Опишите характеристики серийного двигателя, который
позволяют использовать его как универсальный двигатель.
3. Объясните взаимосвязь отдельных фаз
многофазные напряжения, поскольку они создают вращающиеся магнитные поля в двигателях переменного тока.
4. Опишите размещение обмоток статора в двухфазных двигателях переменного тока с использованием вращающихся полей.
5. Перечислите сходства и различия между обмотками статора двухфазных и трехфазных двигателей переменного тока.
6. Укажите основное применение синхронных двигателей и объясните характеристики, которые делают их подходящими.
для этого приложения.
7. Опишите особенности, которые делают асинхронный двигатель переменного тока наиболее широко используемым из
электродвигатели.
8. Опишите разницу между вращающимся полем многофазных двигателей и
«кажущееся» вращающееся поле однофазных двигателей.
9. Объясните принцип работы расщепленных обмоток в
однофазные асинхронные двигатели переменного тока.
10. Опишите влияние экранированных полюсов при однофазной индукции переменного тока.
моторы.
Большинство энергосистем, как на суше, так и на плаву, вырабатывают переменный ток. По этой причине большинство
двигатели, используемые на всем флоте, предназначены для работы от переменного тока. Есть и другие преимущества использования двигателей переменного тока.
помимо широкой доступности переменного тока.Обычно двигатели переменного тока стоят меньше, чем двигатели постоянного тока. Некоторые типы двигателей переменного тока
не используйте щетки и коммутаторы. Это устраняет многие проблемы обслуживания и износа. Это также устраняет
проблема опасного искрения.
Двигатель переменного тока особенно хорошо подходит для приложений с постоянной скоростью.
Это связано с тем, что его скорость определяется частотой переменного напряжения, подаваемого на клеммы двигателя.
Двигатель постоянного тока лучше подходит, чем двигатель переменного тока, для некоторых применений, например для тех, которые требуют переменной скорости.AC
Двигатель также может быть выполнен с регулируемыми частотными характеристиками, но только в определенных пределах.
Промышленные постройки
Двигатели переменного тока различных размеров, форм и номиналов для различных типов работ. Эти двигатели предназначены для
использовать с многофазными или однофазными системами питания. Здесь невозможно охватить все аспекты
Тема двигателей переменного тока. В этой главе рассматриваются только принципы наиболее часто используемых типов.
1 кв. Каковы три основных типа
двигатели переменного тока?
Конструкция двигателя переменного тока немного отличается от двигателя постоянного тока. Специальные металлы,
используются ламинаты и обмотки. Они уменьшают потери, вызванные вихревыми токами, гистерезисом и высоким реактивным сопротивлением. Округ Колумбия
мощность может использоваться для эффективного управления двигателем переменного тока, но обратное неверно.
Характеристики серийного двигателя переменного тока аналогичны характеристикам серийного двигателя постоянного тока. Это машина с переменной скоростью.Это
имеет низкие скорости для больших грузов и высокие скорости для легких грузов. Пусковой момент очень
2 кв. Серийные двигатели
какое оборудование обычно используется для работы? Q3. Почему серийные двигатели иногда называют универсальными?
Идея проста. Магнитное поле в статоре можно заставить электрически вращаться вокруг и вокруг. Другой
Магнитное поле в роторе может преследовать его, притягиваясь и отталкиваясь полем статора. Потому что
ротор может свободно вращаться, он следует за вращающимся магнитным полем в статоре. Посмотрим, как это делается.
Вращающиеся магнитные поля могут быть созданы в двухфазных или трехфазных машинах. Установить вращающийся магнитный
поля в статоре двигателя количество пар полюсов должно быть таким же (или кратным) количеству фаз в
приложенное напряжение. Затем полюса должны быть смещены друг относительно друга на угол, равный фазовому углу между
отдельные фазы приложенного напряжения.
4 кв. От чего зависит количество полевых полюсов, необходимых для
установить вращающееся магнитное поле в статоре многофазного двигателя?
ДВУХФАЗНЫЙ ВРАЩАЮЩИЙСЯ МАГНИТ
ПОЛЕ
Вращающееся магнитное поле, вероятно, легче всего увидеть в двухфазном статоре.Статор двухфазной индукции
двигатель состоит из двух обмоток (или кратных двум). Они размещены под прямым углом друг к другу вокруг
статор. На упрощенном чертеже на рис. 4-2 показан двухфазный статор.
Если напряжения, приложенные к фазам 1-1A и 2-2A, не совпадают по фазе на 90 °, токи, протекающие в
фазы смещены друг от друга на 90º.Поскольку магнитные поля, генерируемые в катушках, находятся в фазе с
соответствующие токи, магнитные поля также на 90º не совпадают по фазе друг с другом. Эти два
Противофазные магнитные поля, оси катушек которых расположены под прямым углом друг к другу, складываются каждые
мгновений
во время их цикла. Они создают результирующее поле, которое вращается на один оборот за каждый цикл переменного тока.
Кому
проанализируйте вращающееся магнитное поле в двухфазном статоре, см. рисунок 4-3.Стрелка представляет ротор.
Для каждой точки, установленной на диаграмме напряжения, учитывайте, что ток течет в направлении, которое вызовет
магнитная полярность указана на каждом полюсе. Обратите внимание, что от одной точки к другой полярности меняются
от одного полюса к другому по часовой стрелке. За один полный цикл входного напряжения получается 360-градусный
поворот полярностей полюсов. Посмотрим, как получается такой результат.
Осциллограммы на рисунке 4-3 представляют собой две входные фазы, смещенные на 90º из-за того, как они были
генерируется в двухфазном генераторе переменного тока. Формы сигналов пронумерованы в соответствии с их фазой. Хотя нет
Как показано на этом рисунке, обмотки для полюсов 1-1A и 2-2A будут такими, как показано на предыдущем рисунке. В
положение 1, ток и магнитное поле в обмотке 1-1A максимальны (поскольку фазное напряжение
максимум).Ток и магнитное поле в обмотке 2-2А равны нулю (поскольку фазное напряжение равно нулю). В
результирующее магнитное поле, таким образом, находится в направлении оси 1-1A. В точке под углом 45 градусов (положение 2)
Результирующее магнитное поле находится посередине между обмотками 1-1A и 2-2A. Токи катушки и магнитные поля равны
равные по силе. При 90º (положение 3) магнитное поле в обмотке 1-1A равно нулю. Магнитное поле в обмотке
2-2A максимально.Теперь результирующее магнитное поле лежит вдоль оси обмотки 2-2А, как показано. В
результирующее магнитное поле повернулось на 90º по часовой стрелке, чтобы перейти из положения 1 в положение 3. Когда
двухфазные напряжения завершили один полный цикл (позиция 9), результирующее магнитное поле повернулось через
360º. Таким образом, поместив две обмотки под прямым углом друг к другу и возбудив эти обмотки напряжением 90º
в противофазе возникает вращающееся магнитное поле.
Двухфазные двигатели используются редко, за исключением специального оборудования. Они обсуждаются здесь, чтобы помочь в
понимание вращающихся полей. Однако вы встретите много однофазных и трехфазных двигателей.
Q5. Каково угловое смещение полюсов возбуждения статора двухфазного двигателя?
Трехфазный асинхронный двигатель также работает от
принцип вращающегося магнитного поля.Следующее обсуждение показывает, как можно расположить обмотки статора.
подключен к трехфазному входу переменного тока и имеет результирующее магнитное поле, которое вращается.
Рисунок 4-4, виды
A-C показывают отдельные обмотки для каждой фазы. Рисунок 4-4, вид D, показывает, как три фазы связаны вместе.
в статоре с Y-соединением. Точка на каждой диаграмме указывает общую точку Y-образного соединения. Ты это видишь
отдельные фазные обмотки равномерно расположены вокруг статора.Таким образом, обмотки разнесены на 120º.
Трехфазное входное напряжение на статоре, показанном на рисунке 4-4, показано на графике рисунка 4-5. Использовать
правило левой руки для определения электромагнитной полярности полюсов в любой момент времени. Применяя
Правило для катушек на рис. 4-4, учтите, что ток течет к номерам клемм для положительного напряжения,
и подальше от номеров клемм для отрицательных напряжений.
Результаты этого анализа показаны для точек напряжения с 1 по 7 на рисунке 4-5. В точке 1
Магнитное поле в катушках 1–1A является максимальным при указанной полярности. При этом возникают отрицательные напряжения.
войлок в обмотках 2-2А и 3-3А.Они создают более слабые магнитные поля, которые, как правило, помогают полю 1-1A. В
точка 2, максимальное отрицательное напряжение ощущается в обмотках 3-3А. Это создает сильное магнитное поле, которое,
в свою очередь, этому способствуют более слабые поля в 1-1A и 2-2A. Поскольку каждая точка на графике напряжения проанализирована, ее можно
Видно, что результирующее магнитное поле вращается по часовой стрелке. Когда трехфазное напряжение
завершает один полный цикл (точка 7), магнитное поле повернулось на 360º.
Q6. Что является основным
разница между двухфазным и трехфазным статором?
ПОВЕДЕНИЕ РОТОРА В ВРАЩАЮЩЕМСЯ ПОЛЕ
Для объяснения движения ротора предположим, что мы можем разместить стержневой магнит в центре статора.
схемы рисунка 4-5. Мы установим этот магнит так, чтобы он мог свободно вращаться в этой области. Предположим также, что
стержневой магнит расположен так, чтобы в точке 1 его южный полюс находился напротив большого N поля статора.
Вы видите, что это выравнивание естественно. В отличие от полюсов притягиваются, и два поля выровнены так, что они
привлечение. Теперь перейдите от точки 1 к точке 7. Как и раньше, поле статора вращается по часовой стрелке. Стержневой магнит,
свободно двигаться, будет следовать за полем статора, потому что притяжение между двумя полями
Помните, это объяснение является чрезмерным упрощением. это
предназначен для демонстрации того, как вращающееся поле может вызвать механическое вращение вала. Такое расположение сработает, но
не используется. Ротор с постоянными магнитами имеет ограничения. Практические двигатели используют другие методы, как мы и будем
см. в следующих абзацах.
Конструкция синхронных электродвигателей по существу такая же, как и конструкция выступающих частей.
полюсный генератор. Фактически, такой генератор может работать как двигатель переменного тока. Он похож на рисунок на рисунке
4-6. Синхронные двигатели имеют характеристику постоянной скорости между холостым ходом и полной нагрузкой. Они способны
коррекции низкого коэффициента мощности индуктивной нагрузки при их работе в определенных условиях.Они есть
часто используется для привода генераторов постоянного тока. Синхронные двигатели рассчитаны на мощность до тысяч лошадиных сил. Они
могут быть выполнены как однофазные, так и многофазные машины. Последующее обсуждение основано на
трехфазный дизайн.
Чтобы понять, как работает синхронный двигатель, предположим, что подача трехфазного переменного тока на
статор вызывает создание вращающегося магнитного поля вокруг ротора.Ротор находится под напряжением постоянного тока (действует
как стержневой магнит). Сильное вращающееся магнитное поле притягивает сильное поле ротора, активируемое постоянным током. Этот
приводит к сильному вращению вала ротора. Таким образом, ротор может поворачивать груз, когда он вращается в
шаг с вращающимся магнитным полем.
Так работает после запуска. Однако один из
Недостатками синхронного двигателя является то, что его нельзя запустить из состояния покоя подачей трехфазного переменного тока.
мощность статора.Когда на статор подается переменный ток, сразу появляется вращающееся с большой скоростью магнитное поле.
Это вращающееся поле проносится мимо полюсов ротора так быстро, что у ротора нет возможности запустить его.
Фактически, ротор сначала отталкивается в одном направлении, а затем в другом. Синхронный двигатель в чистом виде
не имеет пускового момента. Он имеет крутящий момент только тогда, когда он работает с синхронной скоростью.
Беличья клетка
обмотки добавляется к ротору синхронного двигателя, чтобы вызвать его запуск.Беличья клетка обозначена
внешняя часть ротора на рисунке 4-7. Он назван так потому, что имеет форму и выглядит как поворотный
Беличья клетка. Просто обмотки тяжелые медные шины закорочены
Чтобы запустить практический синхронный двигатель, статор находится под напряжением, но подача постоянного тока на поле ротора
не под напряжением.Обмотки с короткозамкнутым ротором доводят ротор до почти синхронной скорости. В этот момент поле постоянного тока
находится под напряжением. Это блокирует ротор синхронно с вращающимся полем статора. Развивается полный крутящий момент, а нагрузка
ведется. Механическое переключающее устройство, работающее за счет центробежной силы, часто используется для подачи постоянного тока на ротор.
по мере достижения синхронной скорости.
Практический синхронный двигатель имеет недостаток, требующий постоянного тока.
напряжение возбудителя для ротора.Это напряжение может быть получено либо снаружи, либо внутри, в зависимости от
конструкция мотора.
Q7. Для удовлетворения каких требований специально разработан синхронный двигатель?
Асинхронный двигатель — это наиболее часто используемый тип двигателя переменного тока. Его простая и прочная конструкция стоит дорого
относительно мало в производстве. Асинхронный двигатель имеет ротор, который не подключен к внешнему источнику
Напряжение.Асинхронный двигатель получил свое название от того факта, что напряжение переменного тока индуцируется в цепи ротора.
вращающееся магнитное поле статора. Во многих отношениях индукция в этом двигателе аналогична индукционной.
между первичной и вторичной обмотками трансформатора.
Большие двигатели и стационарные двигатели
которые приводят в движение нагрузки с довольно постоянной скоростью, часто являются асинхронными двигателями. Примеры можно найти в стиральных машинах,
компрессоры холодильников, настольные шлифовальные машины и настольные пилы.
Статор конструкции трехфазный.
асинхронный двигатель и трехфазный синхронный двигатель практически идентичны. Однако их роторы полностью
разные (см. рис. 4-8). Индукционный ротор представляет собой многослойный цилиндр с прорезями на поверхности. В
обмотки в этих пазах бывают двух типов (показаны на рис. 4-9). Наиболее распространена обмотка типа «беличья клетка».
Вся обмотка состоит из
Независимо от типа ротора, основной принцип остается неизменным.Вращающееся магнитное поле
генерируемый в статоре индуцирует магнитное поле в роторе. Эти два поля взаимодействуют и заставляют ротор
Многофазные асинхронные двигатели Тесла | Двигатели переменного тока
Конструкция асинхронного двигателя переменного тока
Теория работы асинхронных двигателей
Полная скорость двигателя и скорость синхронного двигателя
N с = 120 · f / P N с = синхронная скорость в об / мин f = частота подаваемой мощности, Гц P = общее количество полюсов на фазу, кратное 2
Пример: На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц: S = 120 · 50/4 = 1500 об / мин
Крутящий момент в асинхронных двигателях
s = (N s - N) / N s где: N s = синхронная скорость, N = скорость ротора
f r = s · f где: s = скольжение, f = частота сети статора
Классы двигателей NEMA и IEC
Коэффициент мощности асинхронных двигателей
КПД асинхронных двигателей
Корректор коэффициента мощности Nola
Асинхронные двигатели в качестве генераторов
Запуск двигателя и регулировка скорости
Запуск трехфазных двигателей от однофазных источников
Асинхронные двигатели с несколькими полями
Асинхронные двигатели
N с = 120f / P = 120 * 50/4 = 1500 об / мин (4-полюсный) N с = 3000 об / мин (2-полюсный)
Асинхронные двигатели с переменным напряжением
Электронное управление скоростью в асинхронных двигателях
Многофазные асинхронные двигатели Tesla Сводка
Линейные асинхронные двигатели
(PDF) Управление двухфазным асинхронным двигателем путем изменения угла разности фаз
в положении 500 градусов
в положении 1000 градусов
в положении 500 градусов
Рис. 6.7.b Экспериментальная кривая скорость-время дорожки положения на рис. 6.7.a
Выводы
КПК управляемый инвертор предлагается для
с регулируемой скоростью и положением двухфазного асинхронного двигателя.
Скорость и положение двигателя контролируются не модуляцией
фазного напряжения, а КПК. Предлагаемый инвертор
имеет следующие преимущества. Просто и экономично.
Углы коммутации выходного напряжения ШИМ фиксированы,
упрощает программное и аппаратное обеспечение инвертора. При управлении КПК
напряжение и частота постоянны. Скорость, крутящий момент,
и реверсирование положения могут быть легко выполнены путем реверсирования КПК.
Собственные характеристики подключения могут быть легко выполнены с помощью
, управляющего КПК. КПД двигателя увеличивается по мере приближения КПК
к 90 °, пульсация крутящего момента, вибрации двигателя и шум
уменьшаются с увеличением КПК до 90 °
Используя теории линейного управления, полиномиально пропорциональный контроллер
плюс интегральный (PPI) контроллер был разработан для улучшения отслеживания скорости и положения машины
, где максимальное превышение
, время установления и установившаяся ошибка
выбираются в соответствии с требуемой производительностью.
Из экспериментальных данных можно заметить, что предлагаемый контроллер
(контроллер PPI) и предлагаемый метод управления
(метод управления КПК) достигают требуемых характеристик производительности
в различных рабочих случаях операции
.
СПИСОК ЛИТЕРАТУРЫ
[1] Пол К. Краузе и Олег Васинчук, Электромеханические двигательные устройства,
Книга, Университет Пердью, международное издание 1989 г.
[2] Do.Хён Чан, член IEEE, и Чон Су Вон. «Управление напряжением, частотой,
и углом разности фаз в двухфазных асинхронных двигателях с ШИМ-преобразователями
, @ 1994 IEEE.
[3] C .-M.Yong, C.-C. -Liu и C.-H.Liu: «Новая конструкция с инверторным приводом и метод управления
для двухфазных асинхронных двигателей.», IEEE Proc.-Electr.Power
Appl. Vol. 143, No. 6 November 1996.
[4] L.M.C. Мханго, Г.К. Крейтон, «Новый двухфазный асинхронный двигатель
с питанием от инвертора», тр.IEEE, том 131-B, нет. 3, pp.99-104, 1984.
[5] Дж. Рохар, Дж. Л. Мерц и А. Фогги. «Теоретический и экспериментальный анализ
двухфазного асинхронного двигателя с питанием от инвертора», IEEE Trans. Инд.
Приложение, т. ИА-15, вып. 6, pp. 601-606, 1979.
[6] Y-Sheng Zhou и Lin-Ying Lai «Оптимальный дизайн для нечетких контроллеров с помощью
генетических алгоритмов» Транзакции IEEE в отраслевых приложениях. Vol. 36.no.1
Январь / Февраль 2000.
[7] Карло Чекати, член, IEEE «управление положением асинхронного двигателя с помощью контроллера на основе пассивности
» IEEE-транзакции в промышленных приложениях.Vol.
36. No. 5 сентябрь / октябрь 2000 г.
[8] Амр М. Амин и М. Эль-Корфалли «Электрические приводы», книга, Хелуанский университет
, Египет, 2004 г.
[9] М. Попеску, Э. Деметер, Д. Мику и В. Наврапеску, «Анализ регулятора напряжения
для привода двухфазного асинхронного двигателя», IEEE. 1999.
[10] Хасмух С.Патель, член IEE, и Ричард Г. Хофт, старший член IEE,
«Общие методы устранения гармоник и управления напряжением в тиристорных инверторах
: Часть 1 — устранение гармоник» , IEEE транзакция промышленности
приложений, т.1А-9, №3, МАЙ / ИЮНЬ 1999.
(PDF) Моделирование трехфазного асинхронного двигателя с разомкнутой цепью двух фаз статора
Term9:
следовательно:
Расчет напряжения ротора:
Term10:
9000 5
следовательно:
ПОДТВЕРЖДЕНИЕ
Авторы выражают благодарность Universiti Teknologi
Малайзия (UTM) (Голосование: В.J130000.2423.00G39), Министерство образования
(MOE) и Министерство науки, технологий и
Innovation (MOSTI) правительства Малайзии за
, обеспечивающее финансирование этого исследования.
СПИСОК ЛИТЕРАТУРЫ
[1] П. С. Сен, Принципы электрических машин и силовой электроники. Джон
Wiley & Sons, 2007.
[2] П. Вас, Бездатчиковое векторное и прямое управление крутящим моментом. Оксфордский университет
Press Oxford, UK, 1998.
[3] Кунихиро, Наоки, Такаши Тодака и Масато Энокизоно, «Потеря
оценки сердечника модели асинхронного двигателя с помощью векторного магнитного анализа характеристик
», IEEE Transactions on Magnetics, vol. 47, нет. 5,
pp. 1098-1101, 2011.
[4] Дж. Педра, И. Кандела и Л. Сайнс, «Моделирование асинхронных двигателей с короткозамкнутым ротором
для программ электромагнитных переходных процессов», IET Electr. Power Appl.,
об.3, вып. 2, pp. 111-122, 2009.
[5] Д.Г. Доррел и Ф. Дженсен, «Моделирование асинхронных двигателей с расщепленной фазой с обмотками
с центральной резьбой и асинхронным падением крутящего момента», IEEE
Transactions on Ind. ., т. 45, нет. 1, стр. 168-177, 2009.
[6] М. Джаннати и Э. Фаллах, «Моделирование и векторное управление несимметричными асинхронными двигателями
(неисправные трехфазные или однофазные асинхронные двигатели)»,
1-я конференция по силовой электронике, приводным системам и технологиям,
с.208-211, 2010.
[7] М. Джаннати, NRN Идрис и З. Салам, «Новый метод моделирования
и векторного управления асимметричными асинхронными двигателями», IEEE Energy
, конгресс и выставка по преобразованию, стр. 3625-3632, 2012.
[8] М. Джаннати, NRN Идрис и MJA Азиз, «Новый метод для RFOC
асинхронного двигателя при обрыве фазы», В журнале Industrial Electronics
Society, IECON, С. 2530-2535, 2013.
[9] М.Джаннати, А. Монади, Н. Р. Н. Идрис, М. Дж. А. Азиз и А. А. М. Фаудзи,
«Векторное управление неисправным трехфазным асинхронным двигателем с помощью адаптивного управления скользящим режимом
», Prz Elektrotech, vol. 89, нет. 12, pp. 116-120,
2013.
[10] М. Джаннати, С.А. Анбаран, И.М. Алсофьяни, NRN Idris, и MJA
Азиз, «Моделирование и RFOC неисправного трехфазного IM с использованием расширенного
Фильтр Калмана для оценки скорости ротора », 8-я Международная конференция по проектированию и оптимизации Power
(PEOCO2014), стр.270-275,
2014.
[11] М. Джаннати, А. Монади, NRN Idris и MJA Aziz, «Векторное управление скоростью
без датчика несбалансированного трехфазного асинхронного двигателя
с адаптивным управлением скользящим режимом. ”Международный журнал энергетики
Электроника и приводные системы (IJPEDS), вып. 4, вып. 3, pp. 406-418, 2014.
[12] М. Джаннати, NRN Idris и MJA Aziz, «Indirect Rotor Field-
Oriented Control of Fault Tolerant Drive System for Three-Phase
Induction Motor Field with Оценка сопротивления ротора с помощью EKF »,
TELKOMNIKA Indonesia Journal of Electrical Engineering, vol.12, вып.
9, 6633-6643, 2014.
[13] П. К. Краузе, О. Васинчук, С. Д. Судхофф, Анализ электрического оборудования
и др., Second. A John Wiley & Sons, Wiley-Interscience,
2002.
[14] М. Джаннати, snd E. Fallah, «Новый метод бессенсорного вектора скорости
Управление однофазным асинхронным двигателем с использованием расширенного фильтра Калмана»,
конф. Proc. Of ICEE, стр. 1-5, 2011.
[15] М. Джаннати, Н.RN Idris, MJA Aziz, A. Monadi и AAM Faudzi,
«Новая схема уменьшения пульсаций крутящего момента и скорости в роторе
Полевое управление однофазным асинхронным двигателем на основе
преобразований вращения», Research Journal of Прикладные науки,
Техника и технологии, т. 7, вып. 16, pp. 3405-3409, 2014.
[16] М. Джаннати, Ш. Асгари, NRN Idris и MJA Aziz, «Speed
Бездатчиковое управление однофазной индукцией с прямым ротором. Полевое управление однофазной индукцией
Фильтр Калмана », Международный журнал энергетикиЭлектроника и приводные системы (IJPEDS), вып.4, вып. 4, 2014.
[17] М. Джаннати, А. Монади, С.А. Анбаран, NRN Idris и MJA Aziz,
«Точная модель для полевого управления ротором однофазных асинхронных двигателей
», TELKOMNIKA Индонезийский журнал электротехники
Engineering, vol. 12, вып. 7, pp. 5110-5120, 2014.
[18] М. Джаннати, NRN Idris и MJA Aziz, «Ошибка без датчика скорости —
Система толерантного привода трехфазного асинхронного двигателя с использованием переключения
Расширенный фильтр Калмана. ”ТЕЛКОМНИКА Индонезийский журнал
Электротехника, вып.12, вып. 11, 2014.
Схема и работа однофазного двигателя
Однофазные двигатели очень широко используются в домах, офисах, мастерских и т. Д., Поскольку в большинство домов и офисов подается однофазное питание. Кроме того, однофазные двигатели надежны, дешевы по стоимости, просты в конструкции и легко ремонтируются.
- Однофазный асинхронный двигатель (разделенная фаза, конденсатор, экранированный полюс и т. Д.)
- Однофазный синхронный двигатель
- Отталкивающий двигатель и т. Д.
Однофазный асинхронный двигатель
Конструкция однофазного асинхронного двигателя аналогична конструкции трехфазного асинхронного двигателя с короткозамкнутым ротором, за исключением того, что статор намотан для однофазного питания. Статор также снабжен «пусковой обмоткой», которая используется только для пусковых целей. Это можно понять из схемы однофазного асинхронного двигателя слева.Принцип работы однофазного асинхронного двигателя
Когда на статор однофазного двигателя подается однофазное питание, он создает переменный магнитный поток в обмотке статора. Переменный ток, протекающий через обмотку статора, вызывает индуцированный ток в стержнях ротора (ротора с короткозамкнутым ротором) в соответствии с законом Фарадея об электромагнитной индукции. Этот индуцированный ток в роторе также будет создавать переменный магнитный поток. Даже после установки обоих переменных потоков двигатель не запускается (причина объясняется ниже).Однако, если ротор запускается внешней силой в любом направлении, двигатель разгоняется до конечной скорости и продолжает работать с номинальной скоростью. Такое поведение однофазного двигателя можно объяснить с помощью теории вращения двойного поля.Теория вращения двойного поля
Теория вращения двойного поля утверждает, что любая переменная величина (здесь переменный поток) может быть разделена на две составляющие, величина которых равна половине максимальной величины переменной величины, и обе эти составляющие вращаются в противоположном направлении.
Следующие рисунки помогут вам понять теорию вращения двойного поля.Почему однофазный асинхронный двигатель не запускается автоматически?
Статор однофазного асинхронного двигателя намотан с однофазной обмоткой. Когда на статор подается однофазное питание, он создает переменный магнитный поток (который меняется только вдоль одной оси пространства). Переменный поток, действующий на ротор с короткозамкнутым ротором, не может производить вращение, только вращающийся поток может. Вот почему однофазный асинхронный двигатель не запускается самостоятельно.Как сделать самозапуск однофазного асинхронного двигателя?
- Как объяснено выше, однофазный асинхронный двигатель не запускается автоматически . Для самозапуска его можно временно преобразовать в двухфазный двигатель при запуске. Это может быть достигнуто путем введения дополнительной «пусковой обмотки», также называемой вспомогательной обмоткой.
- Следовательно, статор однофазного двигателя имеет две обмотки: (i) основная обмотка и (ii) пусковая обмотка (вспомогательная обмотка).Эти две обмотки подключены параллельно к однофазному источнику питания и разнесены на 90 электрических градусов друг от друга. Разность фаз 90 градусов может быть достигнута подключением конденсатора последовательно с пусковой обмоткой.
- Следовательно, двигатель ведет себя как двухфазный двигатель, а статор создает вращающееся магнитное поле, которое заставляет ротор вращаться. Как только двигатель набирает скорость, скажем, до 80 или 90% от своей нормальной скорости, пусковая обмотка отключается от цепи с помощью центробежного переключателя, и двигатель работает только от основной обмотки.
ДОБРО ПОЖАЛОВАТЬ В IJSTR (ISSN 2277-8616) —
|