типы, устройство, принцип работы, параметры, производители
Дмитрий Левкин
Электрический двигатель, сокращенно электродвигатель — электрическая машина, с помощью которой электрическая энергия преобразуется в механическую, для приведения в движение различных механизмов. Электродвигатель является основным элементом электропривода.В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Основными компонентами вращающегося электродвигателя являются статор и ротор.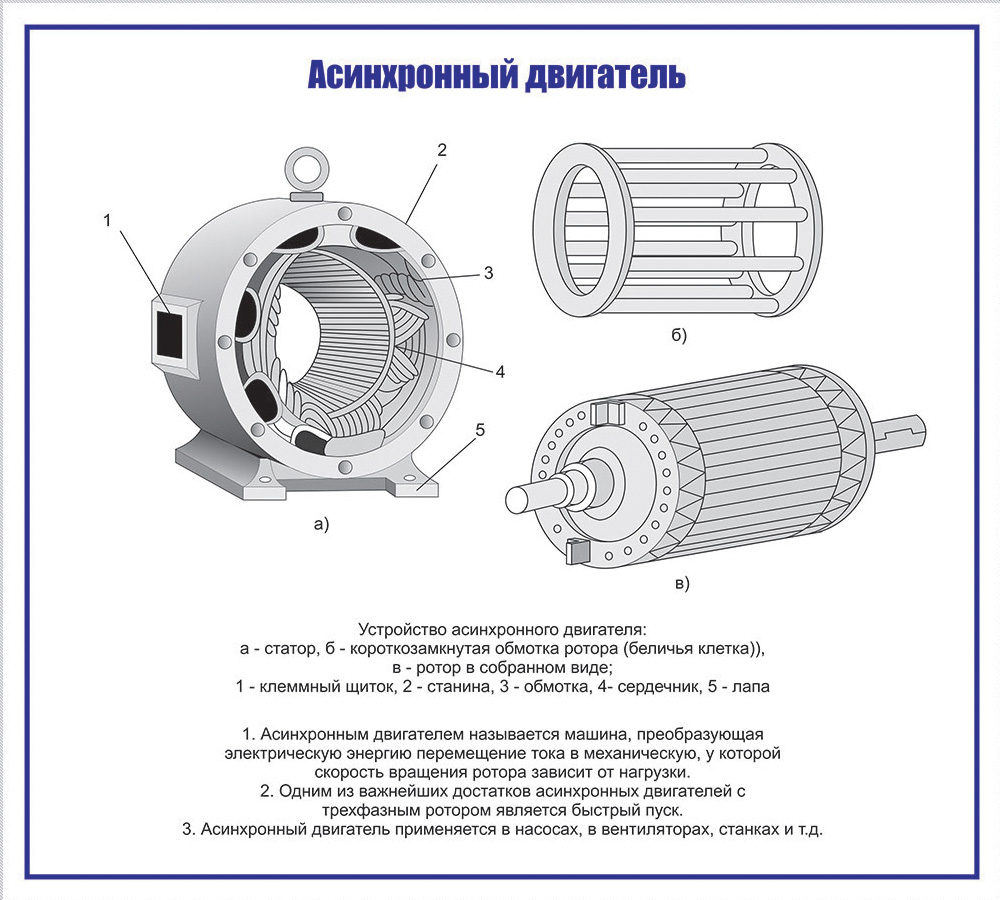
Стандартная конструкция вращающегося электродвигателя
У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
1. Согласно закону Ампера на проводник с током I в магнитном поле будет действовать сила F.2. Если проводник с током I согнуть в рамку и поместить в магнитное поле, то две стороны рамки, находящиеся под прямым углом к магнитному полю, будут испытывать противоположно направленные силы F
 5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по закону электромагнитной индукции ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.
5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по закону электромагнитной индукции ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].

- Вентильный э

Однофазные электродвигатели. Виды, принцип действия, схемы включения однофазных электродвигателей.
Однофазные электродвигатели
Зачастую основное внимание уделяется изучению трёхфазных электродвигателей, частично в связи с тем, что трёхфазные электродвигатели применяются чаще, чем однофазные. Однофазные электродвигатели имеют тот же принцип действия, что и трёхфазные электродвигатели, только с более низкими пусковыми моментами. Они подразделяются по типам в зависимости от способа пуска.
Стандартный однофазный статор имеет две обмотки, расположенные под углом 90° по отношению друг к другу. Одна из них считается главной обмоткой, другая — вспомогательной, или пусковой. В соответствии с количеством полюсов каждая обмотка может делиться не несколько секций.
На рисунке приведен пример двухполюсной однофазной обмотки с четырьмя секциями в главной обмотке и двумя секциями во вспомогательной.
Следует помнить, что использование однофазного электродвигателя — это всегда, своего рода, компромисс. Конструкция того или иного двигателя зависит, прежде всего, от поставленной задачи. Это значит, что все электродвигатели разрабатываются в соответствии с тем, что наиболее важно в каждом конкретном случае: например, КПД, вращающий момент, рабочий цикл и т.д. Из-за пульсирующего поля однофазные электродвигатели CSIR и RSIR могут иметь более высокий уровень шума по сравнению с двухфазными электродвигателями PSC и CSCR, которые работают намного тише, так как в них используется пусковой конденсатор. Конденсатор, через который производится пуск электродвигателя, способствует его плавной работе.
Конструкция того или иного двигателя зависит, прежде всего, от поставленной задачи. Это значит, что все электродвигатели разрабатываются в соответствии с тем, что наиболее важно в каждом конкретном случае: например, КПД, вращающий момент, рабочий цикл и т.д. Из-за пульсирующего поля однофазные электродвигатели CSIR и RSIR могут иметь более высокий уровень шума по сравнению с двухфазными электродвигателями PSC и CSCR, которые работают намного тише, так как в них используется пусковой конденсатор. Конденсатор, через который производится пуск электродвигателя, способствует его плавной работе.
Основные типы однофазных индукционных электродвигателей
Бытовая техника и приборы низкой мощности работают от однофазного переменного тока, кроме того, не везде может быть обеспечено трёхфазное электропитание. Поэтому однофазные электродвигатели переменного тока получили широкое распространение, особенно в США. Очень часто электродвигателям переменного тока отдают предпочтение, так как их отличает прочная конструкция, низкая стоимость, к тому же они не требуют технического обслуживания.
Как видно из названия, однофазный индукционный электродвигатель работает по принципу индукции; тот же принцип действует и для трёхфазных электродвигателей. Однако между ними есть различия: однофазные электродвигатели, как правило, работают при переменном токе и напряжении 110 -240 В, поле статора этих двигателей не вращается. Вместо этого каждый раз при скачке синусоидального напряжения от отрицательного к положительному меняются полюса.
В однофазных электродвигателях поле статора постоянно выравнивается в одном направлении, а полюса меняют своё положение один раз в каждом цикле. Это означает, что однофазный индукционный электродвигатель не может быть пущен самостоятельно.
Теоретически, однофазный электродвигатель можно было бы запустить при помощи механического вращения двигателя с последующим немедленным подключением питания. Однако на практике пуск всех электродвигателей осуществляется автоматически.
Выделяют четыре основных типа электродвигателей:
• индукционный двигатель с пуском через конденсатор / работа через обмотку (индуктивность) (CSIR),
• индукционный двигатель с пуском через конденсатор/работа через конденсатор (CSCR),
• индукционный двигатель с реостатным пуском (RSIR) и
• двигатель с постоянным разделением емкости (PSC).
На приведённом ниже рисунке показаны типичные кривые соотношения вращающий момент/частота вращения для четырёх основных типов однофазных электродвигателей переменного тока.
Однофазный электродвигатель с пуском через конденсатор/работа через обмотку (CSIR)
Индукционные двигатели с пуском через конденсатор, которые также известны как электродвигатели CSIR, составляют самую большую группу однофазных электродвигателей.
Двигатели CSIR представлены несколькими типоразмерами: от самых маломощных до 1,1 кВт. В электродвигателях CSIR конденсатор последовательно соединён с пусковой обмоткой. Конденсатор вызывает некоторое отставание между током в пусковой обмотке и в главной обмотке.
Это способствует задержке намагничивания пусковой обмотки, что приводит к появлению вращающегося поля, которое влияет на возникновение вращающего момента. После того как электродвигатель наберёт скорость и приблизится к рабочей частоте вращения, открывается пускатель. Далее электродвигатель будет работать в обычном для индукционного электродвигателя режиме. Пускатель может быть центробежным или электронным.
Далее электродвигатель будет работать в обычном для индукционного электродвигателя режиме. Пускатель может быть центробежным или электронным.
Двигатели CSIR имеют относительно высокий пусковой момент, в диапазоне от 50 до 250 процентов от вращающего момента при полной нагрузке. Поэтому из всех однофазных электродвигателей эти двигатели лучше всего подходят для случаев, когда пусковые нагрузки велики, например для конвейеров, воздушных компрессоров и холодильных компрессоров.
Однофазный электродвигатель с пуском через конденсатор/ работа через конденсатор (CSCR)
Этот тип двигателей, которые коротко называются «электродвигатели CSCR», сочетает в себе лучшие свойства индукционного двигателя с пуском через конденсатор и двигателя с постоянно подключённым конденсатором. Несмотря на то, что из-за своей конструкции эти двигатели несколько дороже других однофазных электродвигателей, они остаются наилучшим вариантом для применения в сложных условиях. Пусковой конденсатор электродвигателя CSCR последовательно соединён с пусковой обмоткой, как и в электродвигателе с пуском через конденсатор. Это обеспечивает высокий пусковой момент.
Это обеспечивает высокий пусковой момент.
Электродвигатели CSCR также имеют сходство с двигателями с постоянным разделением емкости (PSC), так как у них пуск тоже осуществляется через конденсатор, который последовательно соединён с пусковой обмоткой, если пусковой конденсатор отключен от сети. Это означает, что двигатель справляется с максимальной нагрузкой или перегрузкой.
Электродвигатели CSCR могут использоваться для работы с низким током полной нагрузки и при более высоком КПД. Это даёт некоторые преимущества, в том числе обеспечивает работу двигателя с меньшими скачками температуры, в сравнении с другими подобными однофазными электродвигателями.
Электродвигатели CSCR — самые мощные однофазные электродвигатели, которые могут использоваться в сложных условиях, например, в насосах для перекачивания воды под высоким давлением и в вакуумных насосах, а также в других высокомоментных процессах. Выходная мощность таких электродвигателей лежит в диапазоне от 1,1 до 11 кВт.
Однофазный электродвигатель с пуском через сопротивление/работа через обмотку (индуктивность) (RSIR)
Данный тип двигателей ещё известен как «электродвигатели с расщеплённой фазой». Они, как правило, дешевле однофазных электродвигателей других типов, используемых в промышленности, но у них также есть некоторые ограничения по производительности.
Пусковое устройство электродвигателей RSIR включает в себя две отдельные обмотки статора. Одна из них используется исключительно для пуска, диаметр проволоки данной обмотки меньше, а электрическое сопротивление — выше, чем у главных обмоток. Это вызывает отставание вращающегося поля, что, в свою очередь, приводит в движение двигатель. Центробежный или электронный пускатель отсоединяет пусковую обмотку, когда частота вращения двигателя достигает, приблизительно, 75% от номинальной величины. После этого электродвигатель продолжит работу в соответствии со стандартными принципами действия индукционного электродвигателя.
Как уже говорилось раньше, для электродвигателей RSIR есть некоторые ограничения. У них низкие пусковые моменты, часто в диапазоне от 50 до 150 процентов от номинальной нагрузки. Кроме того, электродвигатель создаёт высокие пусковые токи, приблизительно от 700 до 1000% от номинального тока. В результате продолжительное время пуска будет вызывать перегрев и разрушение пусковой обмотки. Это означает, что электродвигатели данного типа нельзя использовать там, где необходимы большие пусковые моменты.
Электродвигатели RSIR рассчитаны на узкий диапазон напряжения питания, что, естественно, ограничивает области их применения. Их максимальные вращающие моменты варьируются в пределах от 100 до 250% от расчетной величины. Необходимо также отметить, что дополнительной трудностью является установка тепловой защиты, так как довольно сложно найти защитное устройство, которое срабатывало бы достаточно быстро, чтобы не допустить прогорания пусковой обмотки. Электродвигатели RSIR подходят для использования в небольших приборах для рубки и перемалывания, вентиляторах, а также для применения в других областях, в которых допускается низкий пусковой момент и требуемая выходная мощность на валу от 0,06 кВт до 0,25 кВт. Они не используются там, где должны быть высокие вращающие моменты или продолжительные циклы.
Они не используются там, где должны быть высокие вращающие моменты или продолжительные циклы.
Однофазный электродвигатель с постоянным разделение емкости (PSC)
Как видно из названия, двигатели с постоянным разделением емкости (PSC) оснащены конденсатором, который во время работы постоянно включен и последовательно соединён с пусковой обмоткой. Это значит, что эти двигатели не имеют пускателя или конденсатора, который используется только для пуска. Таким образом, пусковая обмотка становится вспомогательной обмоткой, когда электродвигатель достигает рабочей частоты вращения.
Конструкция электродвигателей PSC такова, что они не могут обеспечить такой же пусковой момент, как электродвигатели с пусковыми конденсаторами. Их пусковые моменты достаточно низкие: 30-90% от номинальной нагрузки, поэтому они не используются в системах с большой пусковой нагрузкой. Это компенсируется за счёт низких пусковых токов — обычно меньше 200% от номинального тока нагрузки, — что делает их наиболее подходящими двигателями для областей применения с продолжительным рабочим циклом.
Двигатели с постоянным разделением емкости имеют ряд преимуществ. Рабочие параметры и частоту вращения таких двигателей можно подбирать в соответствии с поставленными задачами, к тому же они могут быть изготовлены для оптимального КПД и высокого коэффициента мощности при номинальной нагрузке. Так как они не требуют специального устройства пуска, их можно легко реверсировать (изменить направление вращения на обратное). В дополнение ко всему вышесказанному, они являются самыми надёжными из всех однофазных электродвигателей. Вот почему Grundfos использует однофазные электродвигатели PSC в стандартном исполнении для всех областей применения с мощностями до 2,2 кВт (2-полюсные) или 1,5 кВт (4-полюсные).
Двигатели с постоянным разделением емкости могут использоваться для выполнения целого ряда различных задач в зависимости от их конструкции. Типичным примером являются низкоинерционные нагрузки, например вентиляторы и насосы.
Двухпроводные однофазные электродвигатели
Двухпроводные однофазные электродвигатели имеют две главные обмотки, пусковую обмотку и рабочий конденсатор. Они широко используются в США с однофазными источниками питания: 1 ½ 115 В / 60 Гц или 1 ½ 230 В / 60 Гц. При правильном подключении данный тип электродвигателей можно использовать для обоих видов электропитания.
Они широко используются в США с однофазными источниками питания: 1 ½ 115 В / 60 Гц или 1 ½ 230 В / 60 Гц. При правильном подключении данный тип электродвигателей можно использовать для обоих видов электропитания.
Ограничения однофазных электродвигателей
В отличие от трёхфазных для однофазных электродвигателей существуют некоторые ограничения. Однофазные электродвигатели ни в коем случае не должны работать в режиме холостого хода, так как при малых нагрузках они сильно нагреваются, также рекомендуется эксплуатировать двигатель при нагрузке меньшей 25% от полной нагрузки.
Электродвигатели PSC и CSCR имеют симметричное/ круговое вращающееся поле в одной точке приложения нагрузки; это значит, что во всех остальных точках приложения нагрузки вращающееся поле асимметричное/эллиптическое. Когда электродвигатель работает с асимметричным вращающимся полем, сила тока в одной или обеих обмотках может превышать силу тока в сети. Такие избыточные токи вызывают потери, в связи с этим одна или обе обмотки (что чаще происходит при полном отсутствии нагрузки) нагреваются, даже если ток в сети относительно небольшой. Смотрите примеры.
Смотрите примеры.
О напряжении в однофазных электродвигателях
Важно помнить о том, что напряжение на пусковой обмотке электродвигателя может быть выше сетевого напряжения питания электродвигателя. Это относится и к симметричному режиму работы. Смотрите пример.
Изменение напряжения питания
Нужно отметить, что однофазные электродвигатели обычно не используются для больших интервалов напряжения, в отличие от трёхфазных электродвигателей. В связи с этим может возникнуть потребность в двигателях, которые могут работать с другими видами напряжения. Для этого необходимо внести некоторые конструкционные изменения, например, нужна дополнительная обмотка и конденсаторы различной ёмкости. Теоретически, ёмкость конденсатора для различного сетевого напряжения (с одной и той же частотой) должна быть равна квадрату отношения напряжений:
Таким образом, в электродвигателе, рассчитанном на питание от сети в 230 В, используется конденсатор 25µФ/400 В, для модели электродвигателя на 115 В необходим конденсатор ёмкостью 100µФ с маркировкой более низкого напряжения — например 200 В.
Иногда выбирают конденсаторы меньшей ёмкости, например 60µФ. Они дешевле и занимают меньше места. В таких случаях обмотка должна подходить для определённого конденсатора. Нужно учитывать, что производительность электродвигателя при этом будет меньше, чем с конденсатором ёмкостью 100µФ — например, пусковой момент будет ниже.
Заключение
Однофазные электродвигатели работают по тому же принципу, что и трёхфазные. Однако у них более низкие пусковые моменты и значения напряжения питания (110-240В).
Однофазные электродвигатели не должны работать в режиме холостого хода, многие из них не должны эксплуатироваться при нагрузке меньше 25 % от максимальной, так как это вызывает повышение температуры внутри электродвигателя, что может привести к его поломке.
Асинхронный двигатель с короткозамкнутым ротором: конструкция, принцип работы
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
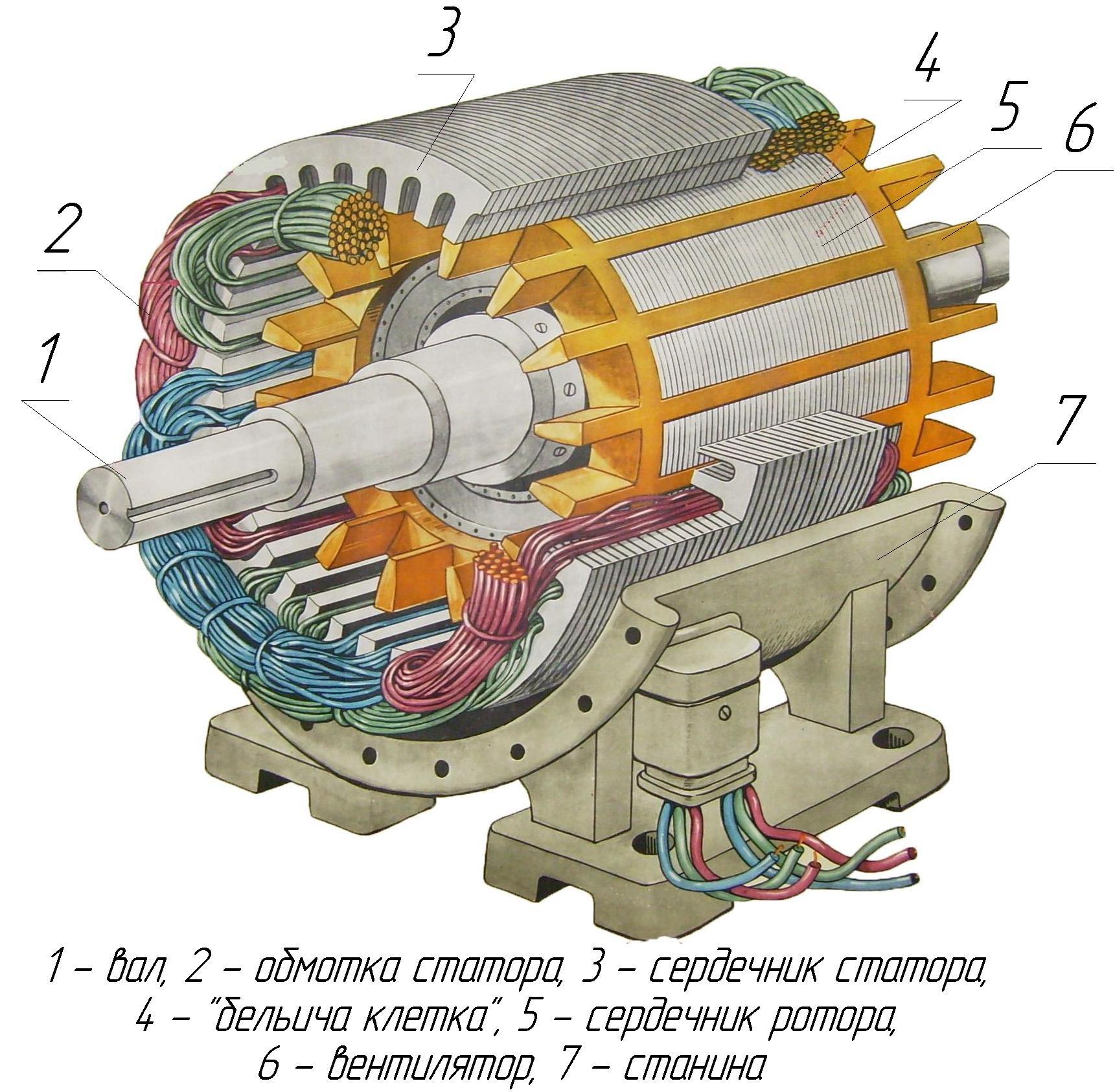
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
Пластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.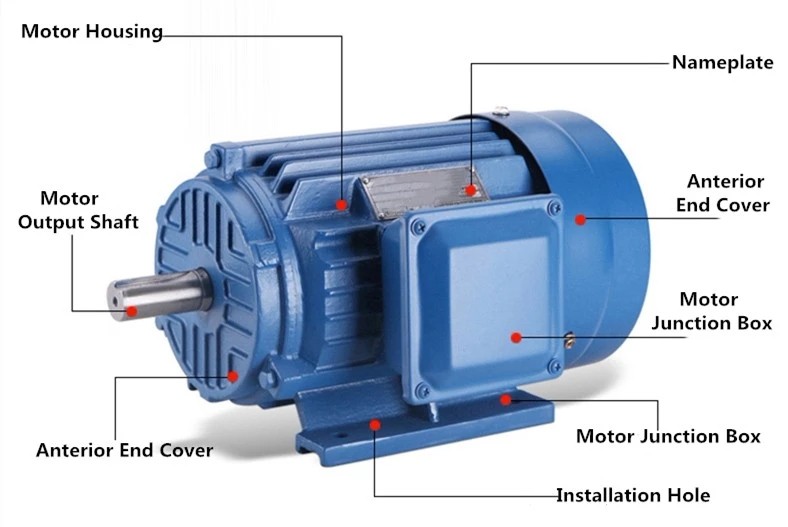
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике.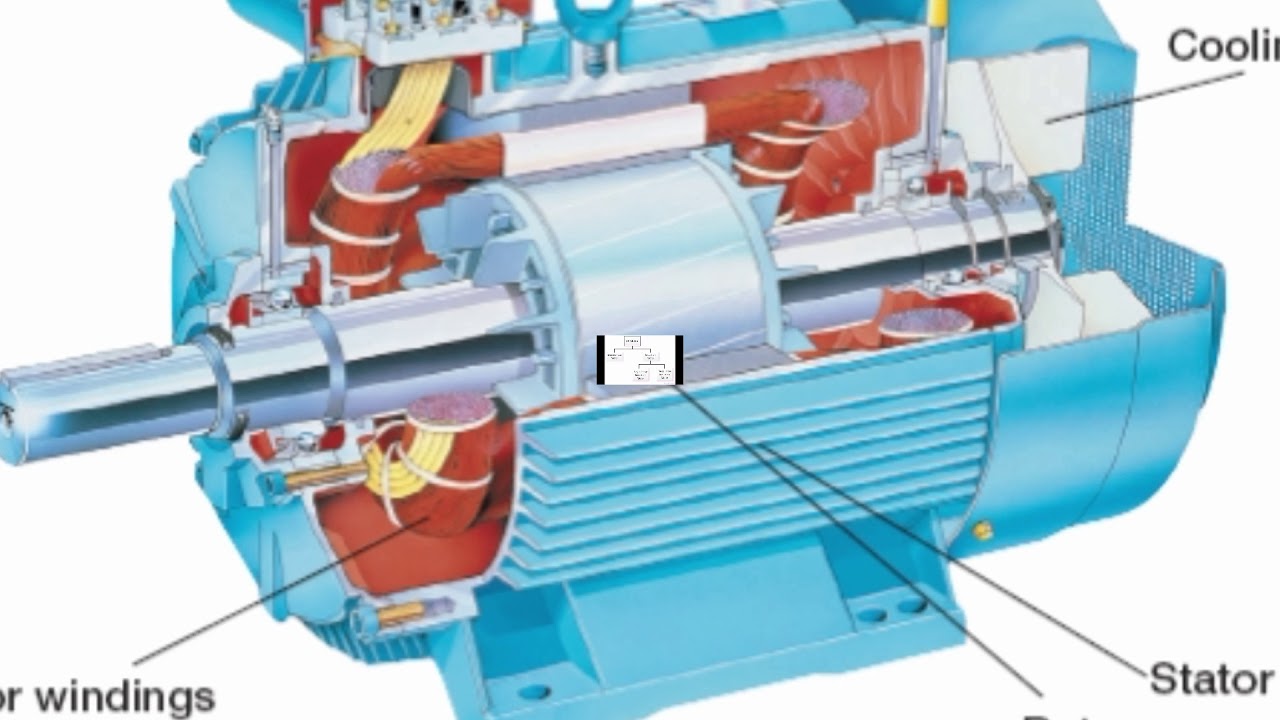 Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.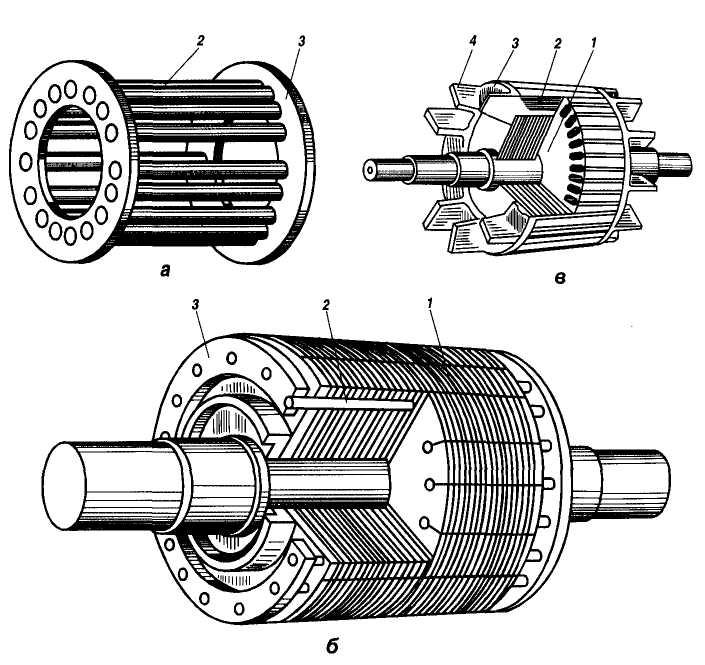
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.

Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сетьС целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
принцип работы и устройство (фото)
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
- конвейеры,
- мощные вентиляторы,
- мельницы,
- эксгаустеры,
- компрессоры,
- дробилки,
- прокатные станки.

Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.
Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.
Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Принцип действия
Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.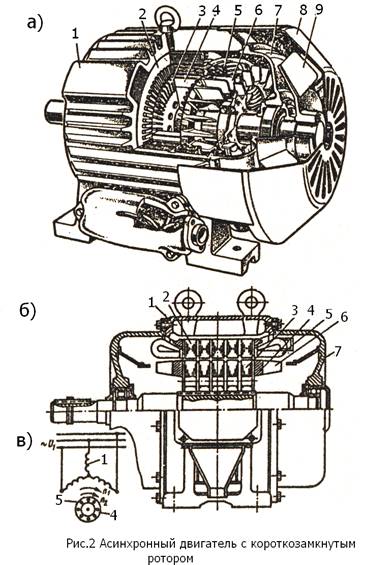
У однофазного двигателя отсутствует пусковой момент. При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными. При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью. При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Пуск электродвигателя
Существует два способа пуска синхронной машины.
- Асинхронное включение
Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.
Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения. Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя
Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
принцип работы, виды и сравнение двигателей
Наша жизнь стала уже просто немыслима без различных электромоторов. Пылесосы, стиральные машины, холодильники вентиляторы, кондиционеры, даже часы — все эти приборы снабжены электродвигателями. Если прибор подключается к домашней электрической сети, то, вероятнее всего, в нем стоит однофазный асинхронный двигатель 220В.
Пылесосы, стиральные машины, холодильники вентиляторы, кондиционеры, даже часы — все эти приборы снабжены электродвигателями. Если прибор подключается к домашней электрической сети, то, вероятнее всего, в нем стоит однофазный асинхронный двигатель 220В.
Принцип действия
Всем нам на школьных уроках физики демонстрировали опыты с проволочной рамкой, помещенной в поле постоянного магнита. Если через рамку пропустить ток, то на проводники в правой и левой части рамки будет действовать силы Ампера, создающие вращающий момент, и рамка с током будет поворачиваться до тех пор, пока она не займет положение, в котором действующие силы уравновешивают друг друга.
Если заставить поле вращаться, рамка с током будет вращаться вместе с ним. На этом принципе основана работа синхронного электродвигателя. Рамка с магнитами — аналог электрического двигателя. Вращающаяся рамка с током — ротор. Неподвижные магниты — статор.
Трехфазный синхронный двигатель
Теперь надо заставить неподвижный статор создать вращающееся магнитное поле.
Для начала заменим постоянные магниты катушками с током обмотками статора. Катушка с током создает такое же магнитное поле, как и магнит. Разместим на статоре не одну катушку-магнит, а три, повернув их на 120 градусов относительно друг друга. Подадим на эти обмотки переменный ток со сдвигом фаз на 120 градусов. Именно так сдвинуты фазы в трехфазной сети.
Результирующее магнитное поле есть результат векторного сложения трех полей. Суммарный вектор магнитной индукции будет вращаться с частотой переменного тока. За один период магнитное поле, создаваемое статором трехфазного двигателя, совершает полный оборот. Ротор, который аналогичен катушке с током, поворачивается вместе с магнитным полем статора с той же скоростью. Таким образом ротор синхронного двигателя вращается частотой питающего переменного тока.
Синхронные двигатели обладают самыми лучшими характеристиками, развивают максимальную мощность и обеспечивают высокий КПД. Однако там тяжелый ротор с обмотками, который сложно балансировать. К обмоткам ротора надо подводить ток, а это требует применения крайне ненадежного щеточного узла. В общем, синхронный двигатель — это хорошо, но сложно, дорого и не очень надежно.
К обмоткам ротора надо подводить ток, а это требует применения крайне ненадежного щеточного узла. В общем, синхронный двигатель — это хорошо, но сложно, дорого и не очень надежно.
Трехфазный асинхронный двигатель
Замкнем концы рамки накоротко. Получим один короткозамкнутый виток. Наш трехфазный статор создает вращающееся магнитное поле. Пусть это поле и создает ток в короткозамкнутом роторе.
Когда поле статора вращается относительно неподвижной рамки, оно создает в ее контуре переменный магнитный поток. По закону электромагнитной индукции переменное поле наводит в рамке электрический ток. Ток создает вращающий момент, и рамка поворачивается вслед за магнитным полем, как и в синхронном двигателе.
Но есть одно принципиальное отличие. В синхронном двигателе ротор вращается одновременно, то есть синхронно с полем статора. Ротор относительно поля статора неподвижен.
В асинхронном двигателе ротор пытается догнать вращающееся поле, но всегда немного отстает, как бы скользит относительно него. Если вдруг скорость вращения ротора точно сравняется со скоростью поля, то в роторе перестанет наводиться ток индукции.
Если вдруг скорость вращения ротора точно сравняется со скоростью поля, то в роторе перестанет наводиться ток индукции.
Разность частот вращения магнитного поля и ротора асинхронного двигателя называется скольжением. Именно оно обеспечивает наличие тока в роторе.
Асинхронные электродвигатели уступают синхронным по всем характеристикам, но значительно проще, легче, надежнее и дешевле. Практически все электрические двигатели, применяемые сегодня в промышленности — это асинхронные трехфазные двигатели.
Механическая характеристика
Механическая характеристика двигателя — это зависимость момента на валу от скорости вращения.
Как уже было сказано, скорость вращения ротора в асинхронном двигателе всегда отличается от скорости вращения поля статора на величину скольжения.
Скольжение S = (n1- n2)/n1, где n1 — это скорость вращения поля, а n2 — скорость вращения ротора.
Характеристика показывает, что двигатель может работать в пяти режимах:
- Холостой ход.
- Пуск.
- Двигательный режим.
- Режим рекуперации.
- Генераторный режим.

В режиме холостого хода скольжение S равно 0. Ротор вращается синхронно с магнитным полем, как в синхронном двигателе, а момент вращения равен 0. Режим холостого хода — чисто гипотетический и никогда не реализуется на практике.
В момент пуска ротор еще неподвижен и S=1. Момент вращения при S=1 называется пусковым моментом.
После пуска ротор входит в двигательный режим и начинает раскручиваться, постепенно догоняя магнитное поле. В двигательном режиме 1 > S > 0.
Если ротор вдруг каким-то образом обгонит поле, то наступит режим рекуперации. При этом двигатель отдает энергию в сеть. В режиме рекуперации S < 0.
S > 1 соответствует генераторному режиму. В генераторном режиме ротор движется навстречу потоку и генерирует электрический ток.
S = Sn соответствует номинальному режиму. Номинальное значение скольжения составляет обычно 2−8%.
Однофазный асинхронный двигатель
Можно еще упросить трехфазный асинхронный двигатель .
Оставим на статоре всего одну обмотку и подадим туда однофазный электрический ток. У нас получился однофазный асинхронный двигатель. В этом двигателе поле статора неподвижно — в этом принципиальное отличие однофазного двигателя от многофазного. Тем не менее такой двигатель работает.
Однофазный двигатель не может стартовать самостоятельно. Ничего особенного в этом нет. Привычный нам двигатель внутреннего сгорания тоже надо сначала раскрутить. В автомобиле мы пользуемся дополнительным электродвигателем — стартером, а в бензопиле делаем это вручную, дергая пусковой шнур.
Если однофазный двигатель подтолкнуть, причем в любую сторону, он разгонится и будет поддерживать вращение в заданном направлении.
Ели ротору придать вращение в определенном направлении, он будет двигаться попутно с одним полем и навстречу другому.
Двигатель можно представить как два трехфазных мотора, насаженных на один вал, но включенных во встречном направлении.
 При запуске вал неподвижен и моторы уравновешивают друг друга.
При запуске вал неподвижен и моторы уравновешивают друг друга.Если вал раскрутить внешней силой в каком-то направлении, то один мотор, запущенный в попутном направлении, окажется в двигательном режиме, а другой — в генераторном. Механическая характеристика показывает, что крутящий момент в двигательном режиме больше, чем в генераторном, поэтому попутный мотор перетягивает.
Пуск
Для запуска однофазного электромотора на его статоре наматывают дополнительную пусковую обмотку перпендикулярно основной и подают в нее ток со сдвигом по фазе. Для сдвига фазы последовательно с обмоткой включают фазосдвигающий элемент. В качестве фазосдвигающего элемента можно использовать резистор, дроссель или конденсатор. В любом случае полное комплексное сопротивление в цепях основной и пусковой обмоток будет разным, и токи получат фазовый сдвиг.
Чаще всего для сдвига фаз используют конденсатор.
Скорость вращения
В сетях наших энергоснабжающих компаний используется переменное напряжение 220/380 с частотой 50 Гц. Причем частота переменного тока 50 Гц поддерживается с точностью до 2 процентов. Как нам уже известно, ротор синхронного электромотора вращается с частотой переменного тока. То есть при частоте питающей сети 50 Гц ротор совершает 50 оборотов в секунду или 3000 оборотов в минуту. Обмотку статора можно разделить на секции и сделать мотор многополюсным. В многополюсном моторе скорость понижается с ростом числа полюсов и в общем случае равна 3000/ p оборотов, где p — это число полюсов.
Причем частота переменного тока 50 Гц поддерживается с точностью до 2 процентов. Как нам уже известно, ротор синхронного электромотора вращается с частотой переменного тока. То есть при частоте питающей сети 50 Гц ротор совершает 50 оборотов в секунду или 3000 оборотов в минуту. Обмотку статора можно разделить на секции и сделать мотор многополюсным. В многополюсном моторе скорость понижается с ростом числа полюсов и в общем случае равна 3000/ p оборотов, где p — это число полюсов.
Таким образом скорость вращения сетевого электромотора в нашей стране не может быть выше 3000 оборотов в минуту. В странах, где принята частота сети в 60 Гц, например, в США, электромоторы крутятся с максимальной скоростью в 3600 оборотов в минуту. И здесь мы снова отстаем от Америки.
В синхронном электромоторе обороты не зависят от нагрузки. При росте нагрузки ротор синхронной машины отстает от поля на больший угол, но частота вращения не меняется.
В асинхронном режиме величина скольжения зависит от нагрузки. Таким образом, при увеличении нагрузки скорость асинхронного электромотора падает.
Таким образом, при увеличении нагрузки скорость асинхронного электромотора падает.
Схемы подключения
Пусковая обмотка, включенная со сдвигом по фазе, поворачивает магнитное поле и превращает на время запуска однофазный электродвигатель в двухфазный.
Дополнительная обмотка не рассчитана на длительную работу и после выхода на рабочий режим должна быть отключена. Отключение производится либо вручную кнопкой, либо центробежным выключателем, либо тепловым реле по нагреву пусковой обмотки.
В однофазном двигателе в рабочем режиме магнитное поле статора неподвижно. В этом его главное отличие от многофазного.
Иногда ошибочно называют однофазными электромоторы, дополнительная обмотка которых подключена через конденсатор постоянно.
В однофазную сеть можно подключить и трехфазный мотор, если одну из фазных обмоток подключить через конденсатор. Так что, если в вашем распоряжении вдруг оказался промышленный трехфазный электромотор, вы можете использовать его в однофазной домашней сети, хотя и с потерей мощности и более низким КПД.
Так что, если в вашем распоряжении вдруг оказался промышленный трехфазный электромотор, вы можете использовать его в однофазной домашней сети, хотя и с потерей мощности и более низким КПД.
Сравнение двигателей
Синхронный
- На роторе есть обмотка, в которую подается ток.
- Частота вращения вала совпадает или кратна частоте питающей сети.
- Скорость стабильна и не меняется под нагрузкой.
Асинхронный
- Ротор не подключен к источнику тока.
- Частота вращения вала ниже частоты сети на величину скольжения.
- Скорость снижается с ростом нагрузки.
Однофазный асинхронный
- Единственная обмотка на статоре.
- Вращается в любом направлении.
- Не запускается самостоятельно.
Однофазные электродвигатели 220в: особенности подключения
В наше время трудно найти человека, который бы не знал что такое однофазный электродвигатель. Однофазные электродвигатели 220 в выпускаются серийно уже довольно много лет.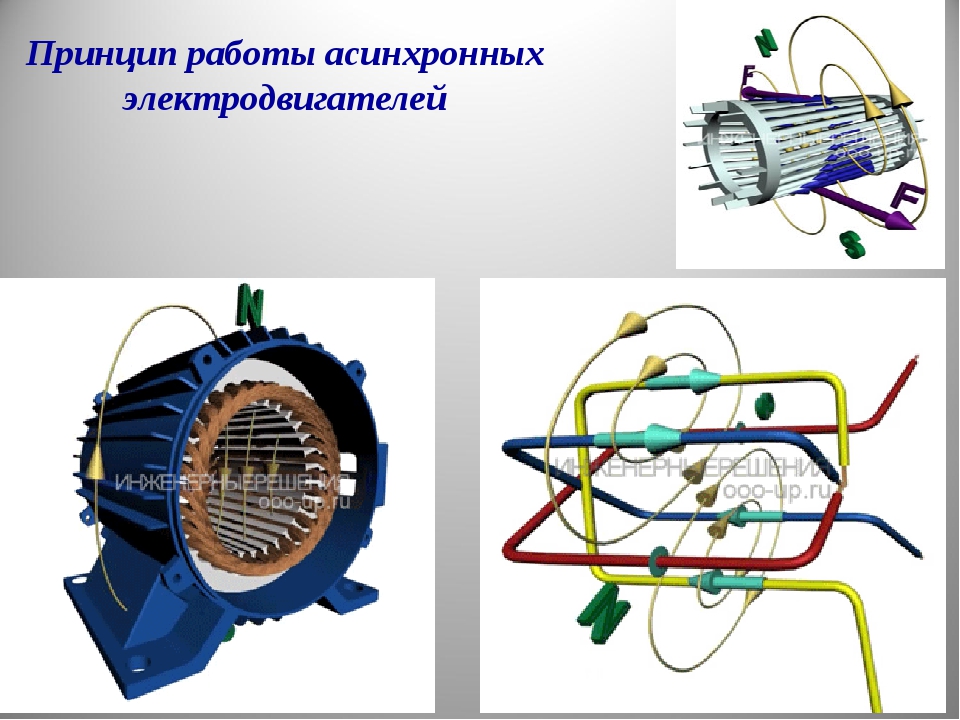 Они востребованы в сельском хозяйстве, быту человека, на производстве, в частных и государственных мастерских. Однофазные двигатели 220 В пользуются высокой популярностью.
Они востребованы в сельском хозяйстве, быту человека, на производстве, в частных и государственных мастерских. Однофазные двигатели 220 В пользуются высокой популярностью.
Общие понятия
Асинхронный двигатель 220 вольт, однофазный, требует питания переменным электрическим током, сеть для подключения такого агрегата должна быть однофазной. Однофазные двигатели 220 в работают при напряжении в сети 220 вольт, частоте 50 герц. Эти электрические величины поддерживаются во всех бытовых электрических сетях, в домах, квартирах, дачах, коттеджах, по всей территории России, а в США напряжение в бытовой электрической сети составляет 110 вольт. На производстве же в нашей стране сетевое напряжение имеется однофазное, трёхфазное, и другие виды электрических сетей.
Применение однофазных моторов
Такой тип моторов применяют для работы устройств с малой мощностью.
- Бытовая техника.
- Вентиляторы небольшого размера.
- Электронасосы.
- Станки, предназначенные для обработки сырья.

Заводы производят электродвигатели однофазные 220 В малой мощности различных моделей, с разным числом оборотов и мощностью. Стоит отметить, что однофазные моторы уступают трёхфазным в нескольких параметрах.
- Эти моторы имеют меньшие значения КПД.
- Пускового момента.
- Мощности.
- Способность выдерживать перегрузку у трёхфазных электромоторов выше, чем у однофазных.
Эти параметры меньше при условии, когда трёхфазные моторы имеют такой же размер.
Устройство электродвигателя
Однофазные двигатели 220 В имеют две фазы, но основная работа выполняется одной, и такие моторы стали называть однофазными. В состав мотора входят следующие детали.
- Статор, или неподвижная часть мотора.
- Ротор, или подвижная (вращающаяся) часть мотора.
Однофазный электромотор можно охарактеризовать как асинхронный электрический мотор, в котором имеется рабочая обмотка на его неподвижной части, она подключается к сети переменного однофазного тока.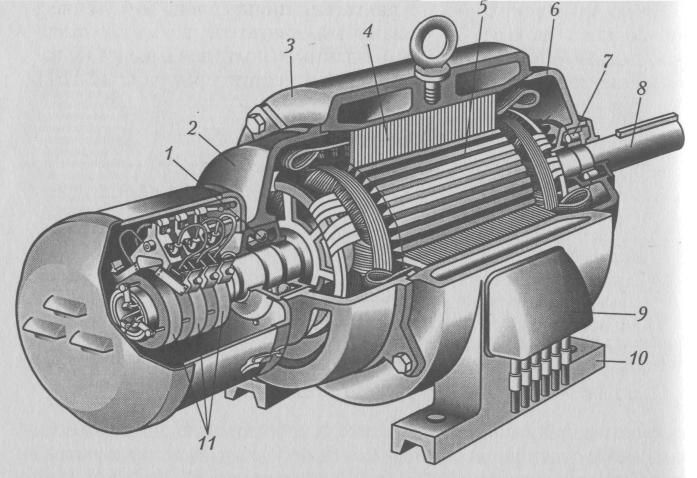
Пусковая катушка
Для того чтобы однофазный мотор мог самостоятельно запускаться и начинать вращение, на них устанавливается ещё одна катушка. Она разработана для запуска двигателя. Пусковая катушка устанавливается по отношению к рабочей со смещением на 90 градусов. Для того чтобы получить сдвиг токов, следует установить в цепь звено, которое будет сдвигать фазы. В качестве фазосдвигающего звена могут выступать несколько средств.
- Активный резистор.
- Конденсатор.
- Катушка индуктивности.
Ротор и статор мотора металлические. Для того чтобы изготовить ротор или статор, нужна специальная электротехническая сталь марки 2212.
Двух и трёхфазные моторы
Существует возможность 2 или 3-фазный мотор подключить к однофазному источнику питания. Иногда по ошибке такие моторы называют однофазными. Это заблуждение, правильно будет называть это «двух (или трёх) фазный электромотор, подключённый в однофазную сеть питания переменного тока». Просто подключить двух или трёхфазный мотор в однофазную сеть не получится. Нужна схема согласования.
Просто подключить двух или трёхфазный мотор в однофазную сеть не получится. Нужна схема согласования.
Таких схем есть несколько, согласование можно реализовать при помощи конденсаторов. После подключения к мотору конденсаторов согласно схеме, мотор будет работать, причём все фазы мотора будут работать, они всё время будут находиться под напряжением и выполнять работу по вращению ротора.
Принцип действия
Переменный электроток создаёт магнитное поле в статоре, которое имеет два поля, они одинаковы по амплитуде, частоте, но разнонаправленны. Эти поля воздействуют на неподвижный ротор, и, вследствие того, что поля разнонаправленны, ротор начинает вращение. При отсутствии в моторе пускового механизма, то ротор будет стоять на месте. Ротор, начав вращение в одну сторону, будет вращаться далее в этом же направлении.
Запуск мотора
Посредством магнитного поля производится запуск мотора, магнитное поле, воздействуя на ротор, принуждает его вращаться. Создают магнитное поле главная и дополнительная катушки, пусковая имеет меньший размер, подключается она к дополнительной через конденсатор, катушку индуктивности или активный резистор.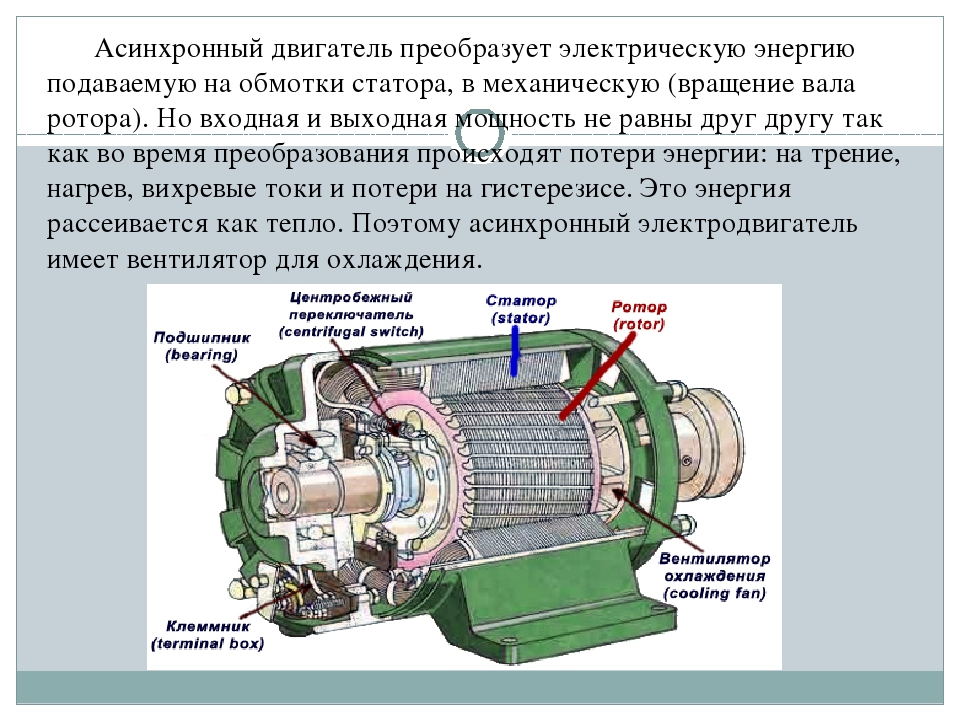
Если мотор низкой мощности, пусковая фаза замкнута. Чтобы запустить такой двигатель, подключать электричество к пусковой катушке можно лишь временно, не более чем на три секунды. Для этого существует пусковая кнопка. Кнопка вставлена в пусковое устройство.
Когда происходит нажатие пусковой кнопки, происходит подача электроэнергии на рабочую и на пусковую катушку одновременно, двигатель в эти первые секунды запуска работает как двухфазный, но через три секунды ротор уже набрал обороты, мотор запустился, и кнопка отпускается. Прекращается подача электроэнергии на пусковую катушку, но подача электричества на рабочую обмотку не прекращается, так устроено пусковое устройство, затем устройство работает уже как однофазное.
Важно помнить, что не следует долго держать пусковую кнопку, так как пусковая катушка может перегреться и выйти со строя, она рассчитана на работу несколько секунд. Для обеспечения безопасности в корпусе однофазного силового агрегата может быть встроено тепловое реле, центробежный выключатель. Центробежный выключатель устроен таким образом, что когда ротор набрал обороты, центробежный выключатель выключается сам, без вмешательства человека. Пусковой ток однофазного двигателя выше рабочего, после запуска ток снижается до уровня рабочего. Схему подключения однофазного двигателя смотрите здесь.
Центробежный выключатель устроен таким образом, что когда ротор набрал обороты, центробежный выключатель выключается сам, без вмешательства человека. Пусковой ток однофазного двигателя выше рабочего, после запуска ток снижается до уровня рабочего. Схему подключения однофазного двигателя смотрите здесь.
Тепловое реле
Тепловое реле действует следующим образом: при нагревании обмоток до установленного на реле предела, реле производит прекращение подачи электроэнергии на обе фазы, таким образом, исключается выход из строя при перегрузке или другой причине, это не даст возникнуть пожару.
Достоинства
К положительным качествам такого мотора можно отнести простоту его устройства, ротор в этой конструкции короткозамкнутый, обмотка статора не представляет собой большой сложности.
Недостатки
Кроме достоинств, в этом моторе имеются и некоторые недостатки.
- Невысокий пусковой момент мотора.
- Низкий КПД электродвигателя.
- Электродвигатель не способен генерировать магнитное поле, которое выполняет вращение.
По этой причине такой двигатель сам не может начать вращение. Дело в том что для того, чтобы мотор начал вращение, он должен иметь не менее двух обмоток, а следовательно, и двух фаз, но мотор имеет одну фазу изначально, таково его устройство. Кроме наличия двух фаз, требуется чтобы одна обмотка была смещена по отношению к другой на определённый угол.
Подключение двигателя
Подключать двигатель нужно в однофазную сеть переменного напряжения 220 вольт, частотой 50 герц. Эти номиналы электроэнергии имеются во всех жилых помещениях нашей страны, и вследствие этого однофазные моторы имеют огромную популярность. Они установлены во всей бытовой технике, такой как.
- Холодильник.
- Пылесос.
- Соковыжималка.
- Триммер.
- Кусторез электрический.
- Швейная машинка.
- Электродрель.
- Миксер кухонный.
- Вентилятор.
- Насос водяной.
Разновидности подключения
- Подключение с пусковой катушкой.
- Подключение с рабочим конденсатором.

Электродвигатели однофазные 220 В малой мощности с пусковой катушкой имеют включённый в цепь конденсатор во время старта. После разгона ротора катушка отключается. Если мотор сделан с рабочим конденсатором, цепь пуска не размыкается, идёт постоянная работа пусковой обмотки через конденсатор.
Существует возможность использовать один электромотор для разных целей. Один и тот же мотор можно снять с одной техники и установить на другую. Включать однофазный двигатель можно тремя схемами.
- Происходит временное включение электричества на пусковую обмотку через конденсатор.
- Происходит кратковременная подача напряжения на пусковое устройство через резистор, без конденсатора.
- Электричество подаётся через конденсатор на пусковую обмотку постоянно, одновременно с работой рабочей обмотки.
При использовании в цепи пуска резистора, обмотка будет иметь активное сопротивление выше. Произойдёт сдвиг фаз, достаточный для начала вращения. Можно использовать пусковую обмотку, в которой большее сопротивление и меньшая индуктивность. Чтобы обмотка соответствовала своим параметрам, она должна иметь меньше витков, тоньше провод.
Можно использовать пусковую обмотку, в которой большее сопротивление и меньшая индуктивность. Чтобы обмотка соответствовала своим параметрам, она должна иметь меньше витков, тоньше провод.
Конденсаторный пуск представляет собой подключение конденсатора к пусковой обмотке и временную подачу электроэнергии. Чтобы достичь максимального значения момента пуска, нужно круговое магнитное поле, оно должно выполнить вращение. Для этого нужно расположение обмоток под углом 90 градусов. Такого сдвига резистором добиться невозможно. Если ёмкость конденсатора рассчитать правильно, то удастся сдвинуть обмотки под угол 90 градусов.
Вычисление принадлежности проводов
Чтобы вычислить провода, подключающие пусковую обмотку и рабочую, нужно иметь прибор, измеряющий омы или тестер. Нужно замерять сопротивления обмоток. Сопротивление рабочей обмотки должно быть меньше, чем пусковой. Например, если замеры показали у одной обмотки 12 Ом, а у другой 30 Ом, то первая из них рабочая, а вторая пусковая. Рабочая обмотка будет иметь большее сечение чем пусковая.
Нужно замерять сопротивления обмоток. Сопротивление рабочей обмотки должно быть меньше, чем пусковой. Например, если замеры показали у одной обмотки 12 Ом, а у другой 30 Ом, то первая из них рабочая, а вторая пусковая. Рабочая обмотка будет иметь большее сечение чем пусковая.
Подборка ёмкости конденсатора
Чтобы подобрать ёмкость конденсатора, нужно знать, какой ток потребляет электромотор. Если он потребляет ток 1,4 ампера, то нужен конденсатор, ёмкость которого составляет 6 микрофарад.
Проверка работоспособности
Начать проверку следует с визуального осмотра.
- Если у агрегата была отломана опора, то вследствие этого он тоже мог работать плохо.
- В случае если потемнел корпус посередине, это говорит о том что он чрезмерно перегревался.
- Возможно, что в разрез корпуса попали разные посторонние вещи, это будет замедлять его и способствовать перегреву.
- Если подшипники загрязнены, будет происходить перегревание.
- Износ подшипников будет причиной перегревания.
- Если к пусковой обмотке 220v подключён конденсатор завышенной ёмкости, то он будет перегреваться. При подозрении на конденсатор нужно отключить его от пусковой обмотки, включить двигатель в сеть, вручную прокрутить вал, произойдёт запуск и начнётся вращение. Нужно дать мотору поработать около пятнадцати минут, затем проверить, не нагрелся ли он. Если мотор не нагрелся, то причина была в повышенной ёмкости конденсатора. Нужно установить конденсатор меньшей ёмкости.

Электродвигатели однофазные 220 в малой мощности выпускаются совершенно разных моделей и для разных целей, и, прежде чем купить изделие, нужно чётко понимать, какова нужна мощность, тип крепления, количество оборотов в минуту, и прочие характеристики.
 youtube.com/embed/ohyEgfu3wNY» allowfullscreen=»allowfullscreen»/>
youtube.com/embed/ohyEgfu3wNY» allowfullscreen=»allowfullscreen»/>
Однофазные двигатели для домашнего использования
1. Введение
Энергосбережение — важный аспект устойчивого развития в современном обществе. В этой области электрические машины играют фундаментальную роль в промышленных, коммерческих и жилых помещениях. Хорошо известно, что энергия, потребляемая электрическими машинами, составляет наибольшую часть от общего потребления электроэнергии в промышленном секторе. Повышение эффективности может привести к значительному сокращению потребления ископаемого топлива, а также к снижению воздействия человеческой деятельности на окружающую среду.По этой причине в настоящее время и во всем мире все продукты для промышленного или бытового применения классифицируются на основе их энергоэффективности.
Однофазные асинхронные двигатели используются в быту благодаря своей прочной и простой конструкции, а также возможности подключения непосредственно к однофазной сети без использования преобразователей мощности [1, 2]. Однофазные асинхронные двигатели с расщепленными фазами и расщепленными полюсами (SPIM) представляют собой сегодня наиболее распространенные однофазные двигатели общего назначения.Поскольку SPIM по своей природе не запускаются автоматически при прямом подключении к сети, они используют вспомогательную обмотку для улучшения пусковых возможностей. Наиболее важными характеристиками SPIM являются: прочная и относительно дешевая конструкция и способность выдерживать большие перегрузки. По сравнению с трехфазными асинхронными двигателями [3] и другими типами машин, SPIM имеют гораздо более низкий КПД из-за более высоких потерь в меди и сердечнике [4].
Однофазные асинхронные двигатели с расщепленными фазами и расщепленными полюсами (SPIM) представляют собой сегодня наиболее распространенные однофазные двигатели общего назначения.Поскольку SPIM по своей природе не запускаются автоматически при прямом подключении к сети, они используют вспомогательную обмотку для улучшения пусковых возможностей. Наиболее важными характеристиками SPIM являются: прочная и относительно дешевая конструкция и способность выдерживать большие перегрузки. По сравнению с трехфазными асинхронными двигателями [3] и другими типами машин, SPIM имеют гораздо более низкий КПД из-за более высоких потерь в меди и сердечнике [4].
Двигатели, используемые в бытовых приборах, часто имеют небольшую номинальную мощность, менее 2 кВт, и работают с постоянной скоростью [5].
В этом диапазоне мощности, чем меньше двигатель, тем ниже КПД машины. В основном это связано с тем, что потери в стали и в меди значительны по сравнению с номинальной мощностью. На самом деле сердечник статора малых двигателей обычно не отжигается; длина воздушного зазора относительно велика, а сопротивление обмоток статора сравнительно велико.
Синхронные двигатели с постоянными магнитами (PMSM) обеспечивают более высокий КПД и высокий крутящий момент, хотя для нормальной работы им необходим инвертор [6].Благодаря значительному улучшению магнитных и тепловых свойств постоянных магнитов (ПМ) материалов за последние 40 лет, наряду со значительным снижением затрат, синхронные двигатели с постоянными магнитами приобрели популярность как в категориях с питанием от инвертора, так и в категориях запуска от сети [ 7, 8].
Благодаря своей простой конструкции и прямому подключению к сети однофазные двигатели с постоянным током с линейным запуском (SPLSPMM) представляют собой хорошую альтернативу асинхронным двигателям, поскольку они обеспечивают значительную экономию энергии в долгосрочной перспективе.SPLSPMM конструктивно похожи на однофазные асинхронные двигатели с добавлением постоянных магнитов, приклеенных или встроенных в ротор. Двигатели с постоянным пуском от сети имеют более высокий КПД, чем SPIM, и работают с коэффициентом мощности, близким к единице [9]. Также они могут питаться от трехфазного источника питания и могут быть снабжены кожухом ротора [10, 11]. Этот тип двигателя подходит для использования в таких устройствах, как дренажные насосы и электрические вентиляторы [12]. Двигатели с постоянным током с линейным пуском запускаются как асинхронные двигатели и работают синхронно, как любой другой тип синхронного двигателя.
По сравнению с широко распространенными асинхронными двигателями, двигатели с постоянным магнитом и возможностью прямого пуска в оперативном режиме имеют более высокий КПД, высокий коэффициент мощности, низкую чувствительность к колебаниям напряжения и компактные размеры. У них также есть дополнительное преимущество в достижении более высокой плотности мощности, помимо способности работать с синхронной скоростью [13, 14].
В частности, SPLSPMM можно использовать вместо обычных асинхронных двигателей для таких приложений, как насосы, кондиционеры и вентиляторы [15]. Однако синхронный двигатель с постоянными магнитами, работающий на частоте сети, имеет серьезный недостаток во время переходного процесса пуска, поскольку отверстие в железе статора должно быть точно профилировано для увеличения пускового момента и улучшения способности синхронизироваться с нагрузкой, приложенной к его валу.
Во время запуска двигателя ускоряющий момент двигателя SPLSPMM представляет собой средний крутящий момент клетки (если клетка присутствует) минус момент нагрузки. Постоянные магниты на роторе также создают тормозной момент, который снижает пусковой момент и снижает способность ротора к синхронизации. Оптимизация конструкции этих двигателей улучшает выходной крутящий момент, а также их общий КПД.
Этому вопросу посвящена техническая литература, и в различных работах исследовалось, как повысить эффективность SPLSPMM [16, 17].
Даже если превосходство SPLSPMM в отношении SPIM хорошо известно, SPIM все еще широко используются во многих различных бытовых приборах.
В этой главе анализируются основные конструкции однофазных двигателей и сравниваются различные конструкции ротора, подходящие для SPLSPMM, с различным расположением магнитов.
Один асинхронный двигатель с расщепленными полюсами (как показано на рисунке 1), используемый в бытовой технике, сравнивается с различными конструкциями недорогого однофазного двигателя с постоянным током (SPLSPMM) [18, 19], чтобы численно оценить улучшение его характеристик.
Рисунок 1.
Прототип ротора с линейным запуском (справа), статор (в центре), ротор с расщепленными полюсами (слева).
Представлены модели с сосредоточенными параметрами однофазного асинхронного двигателя и однофазного двигателя с постоянным током от сети [20, 21] вместе с их эквивалентными схемами.
Эквивалентная схема SPLSPMM очень похожа на эквивалентную схему SPIM. Благодаря этому SPLSPMM можно легко рассматривать как частный случай SPIM с наличием постоянных магнитов в роторе; это упрощает сравнение их общих характеристик.
Таким образом, сравнение конструкций ротора выполняется с помощью анализа методом конечных элементов. Оптимальное решение проверено экспериментально.
Целью исследования является численная оценка характеристик SPLSPMM и его эффективности по сравнению с SPIM с заштрихованными полюсами того же объема и веса [22]. Сравниваемые двигатели в основном имеют одинаковую конструкцию.
Сравнение проводится с использованием метода конечных элементов (МКЭ), аналитической модели и экспериментов.
В разделе 4 показана математическая модель тестируемого двигателя, а в разделе 5 показана процедура проектирования.Результаты экспериментального сравнения приведены в разделе 6.
2. КПД однофазных двигателей
Однофазные асинхронные двигатели с расщепленными полюсами широко используются, но их КПД невысок. Их низкие характеристики обусловлены их внутренними характеристиками. Потребность в устойчивости привела к международным нормам в области энергоэффективности. Стандарт IEC 60034-30-1, опубликованный в марте 2014 года, классифицирует двигатели по четырем уровням энергоэффективности (IE1 – IE4).
Стандарт IEC 60034-30-1 применяется как к одно-, так и к трехфазным двигателям. Классификация различается для двигателей с разным количеством пар полюсов. Европейский Союз транспонировал стандарт IEC 60034-30-1, введя временную шкалу энергоэффективности всех двигателей, производимых в диапазоне мощности 0,75–375 кВт. С 2017 года все выпускаемые электродвигатели должны иметь КПД не ниже класса IE3 (или IE2, если двигатель питается от инвертора). Ожидается, что в будущем ассортимент будет расширен.Оптимизация двигателей для повседневного использования может сэкономить огромное количество энергии и сохранить конкурентоспособность отраслей.
В литературе много исследований, направленных на улучшение выходных характеристик асинхронных двигателей [23, 24]. Однофазные асинхронные двигатели с пуском от сети бывают двух основных типов:
В первом используется вспомогательная обмотка с внешним импедансом. Значение импеданса выбирается с учетом различных аспектов:
Подавление обратного поля : Конденсатор выбирается для того, чтобы, насколько это возможно, отменить обратный крутящий момент, присутствующий в машине, чтобы получить круговой поле в воздушном зазоре и исключить альтернативные крутящие моменты с двойной пульсацией по отношению к питанию.Однако этот метод позволяет оптимизировать производительность при одной рабочей скорости;
Минимизация отношения обратного крутящего момента к прямому крутящему моменту : Внешний импеданс выбирается так, чтобы максимизировать производительность в широком диапазоне скоростей;
Максимизация электромагнитного момента .
Максимизация соотношения крутящий момент / потребление тока ;
Для достижения тех же целей в асинхронных двигателях с экранированными полюсами используется вспомогательная обмотка, которая, как правило, короткозамкнута и пространственно отстает от основной обмотки.Импеданс вспомогательной обмотки приводит к необходимому запаздыванию.
3. Двигатели с постоянным магнитом и линейным пуском
Синхронные двигатели с постоянным магнитом и линейным пуском конструктивно аналогичны однофазным асинхронным двигателям, за исключением постоянных магнитов, расположенных на роторе. КПД SPLSPMM выше по сравнению с обычными SPIM, и, кроме того, они могут работать с коэффициентом мощности, близким к единице. SPLSPMM в основном используются в домашних условиях, таких как холодильники, компрессоры или вытяжки / вентиляторы.Однако эти преимущества приводят к увеличению производственных затрат. Поскольку стоимость высокоэнергетических постоянных магнитов снижается, можно ожидать, что SPLSPMM завоевал более широкую долю рынка, чтобы соответствовать требованиям по энергоэффективности.
SPLSPMM сочетает в себе преимущества двигателей с постоянными магнитами и преимущества ротора с сепаратором. Беличья клетка обеспечивает возможность асинхронного запуска, а действие магнитов нарушает переходную фазу. Еще одним преимуществом SPLSPMM с сепаратором ротора является то, что они могут быть прикреплены непосредственно к сетке.
В установившемся режиме двигатель работает с синхронной скоростью. При синхронной скорости токи можно уменьшить. Фактически, в асинхронной машине крутящий момент достигается за счет разницы скоростей между главным магнитным потоком и ротором. Это явление приводит к потерям Джоуля в стержнях ротора и, в меньшей степени, к потерям в сердечнике ротора. Кроме того, ток намагничивания, необходимый для создания магнитного поля, определяет дополнительные потери в статоре. В синхронных машинах магнитное поле создается обмоткой якоря и возбуждением, причем большая часть магнитного потока создается возбуждением, в то время как меньшее количество реактивной мощности поглощается сеткой во время работы.Причем в этом случае поле возбуждения получается с помощью постоянных магнитов; нет потерь в меди в роторе и практически нет потерь в сердечнике.
Основные ограничения машин с линейным запуском (аналогично SPIM) заключаются в том, что поле воздушного зазора является эллиптическим, а возможности запуска ограничены. К счастью, большинство ограничений можно решить путем соответствующей формы магнитной цепи.
Математические модели SPIM и SPLSPMM основаны на разложении основных потоков на прямые и квадратурные составляющие [25, 26, 27, 28].
В этой главе представлена математическая модель асинхронной машины с расщепленными полюсами и однофазной машины с постоянным магнитом и пуском от сети. Сравниваются характеристики обоих типов двигателей. Модель использует пространственные векторы [23] для описания распределения индукции в воздушном зазоре.
3.1. Схема замещения однофазного асинхронного двигателя
Однофазные асинхронные двигатели широко используются в маломощных приложениях (до нескольких кВт). Конструкция этих машин аналогична трехфазной версии, с одной однофазной обмоткой статора и одним корпусом ротора.Однако они достигают более низкой плотности мощности. На обмотку статора, которая обычно занимает две трети периферии статора, подается синусоидальное напряжение, которое также вызывает синусоидальную MMF. Распределение магнитного поля в воздушном зазоре имеет фиксированное положение, а его амплитуда синусоидально изменяется вместе с током.
3.1.1. MMF и крутящий момент, создаваемый основной обмоткой
Магнитное поле в воздушном зазоре, создаваемое однофазной обмоткой, составляет:
E1
, где p — количество пар полюсов, а α — угловая координата в ссылка статора.
Если в уравнении. 1 установлено:
E2
с N количество витков на пару полюсов; ξ коэффициент намотки; δ ширина воздушного зазора; μo проницаемость вакуума.
Рассматривая случай синусоидального питания:
E3
Используя уравнение. (1):
E4
, который представляет собой электромагнитную волну, амплитуда которой изменяется во времени. Уравнение (4) можно легко переписать, используя тригонометрические допущения:
E5
Это означает, что магнитное поле однофазной обмотки может быть получено как сумма двух разных полей с одинаковой амплитудой и с разным вращением ( Фигура 2).
Рисунок 2.
Направления вращения поля.
Эти два поля оказывают одинаковое влияние на ротор. Поле, вращающееся в том же направлении, что и ротор, называется прямым полем , а другое обратным полем . Точно так же электромеханический крутящий момент (T) можно рассматривать как сумму прямого крутящего момента T d , вызванного прямым полем, и обратного крутящего момента T i , вызванного обратным полем.Очевидно, что значения этих моментов зависят от скорости вращения ротора. T d и T i равны, если скорость равна нулю, то есть скольжение равно единице (поскольку при нулевом скольжении магнитные поля, имеющие равные амплитуды, вращаются с одинаковой скоростью, но в противоположных направлениях) . Во всех остальных рабочих точках значения крутящего момента другие.
Следовательно, можно определить два проскальзывания, одно прямое и одно обратное:
E6
E7
Для изучения SPIM можно ввести упрощение, рассмотрев двигатель как объединение двух трехфазных машин.Систему можно изучать с помощью техники наложения эффектов.
Главный недостаток чисто однофазной асинхронной машины заключается в том, что она не запускается самостоятельно, поскольку в начальной точке результирующий крутящий момент равен нулю. Когда ротор вращается, возникает ненулевой чистый крутящий момент.
3.1.2. Подавление обратного поля
Для решения проблемы подавления обратного поля, создаваемого первичной обмоткой однофазного асинхронного двигателя, могут применяться различные методы.Как правило, это делается путем добавления вспомогательной обмотки с магнитной осью, смещенной на γ электрических радиан от основной обмотки, и подачи в две обмотки токов, взаимно смещенных во времени на угол φ (Рисунок 3).
Рисунок 3.
Упрощенная принципиальная схема асинхронного двигателя с расщепленной фазой.
Вспомогательная обмотка создает дополнительное поле. Ba :
E8
Если γ положительный, то вспомогательная обмотка отстает.Если на вспомогательную обмотку подается ток, отстающий на φ от тока в основной обмотке в формуле. 5, распределение плотности потока становится следующим:
E9
Результирующая плотность потока в воздушном зазоре достигается суммированием уравнения. (9) к формуле. (5) и состоит из двух вращающихся полей, одно в прямом направлении :
E10
, а другое в обратном направлении :
E11
Чтобы в идеале отменить обратное поле, должны быть выполнены два условия. считается:
1.Амплитуды MMF первичного и вспомогательного полей должны быть равны:
2. Должно соблюдаться следующее соотношение между геометрическим и временным фазовым лагом:
Наконец, максимальная амплитуда прямого поля достигается, если:
E12
В случае, если достигаются два условия для подавления обратного потока, результирующая плотность потока в воздушном зазоре достигается суммированием уравнения. (9) к формуле. (5):
E13
Ур.(13) представляет одно поле, вращающееся в одном направлении, как в трехфазной машине. Очевидно, что идеального гашения можно добиться только в одной рабочей точке, например, при запуске или при номинальной нагрузке.
В машинах с расщепленной фазой условие 2 достигается за счет смещения вспомогательной обмотки на γ = π / 2, что означает φ = — π / 2. Знак минус означает, что вспомогательный ток опережает основного тока.
Таким образом, SPIM с расщепленной фазой включает в себя две обмотки статора: одну основной обмотки и одну вспомогательную обмотку , смещенных на 90 °.Если вспомогательная обмотка используется для запуска, ее можно исключить, когда машина достигнет фиксированного рабочего состояния.
Задержка по току π / 2 создается путем последовательного включения конденсатора во вспомогательную обмотку. Это необходимо для обеспечения возможности самозапуска и улучшения его характеристик, чтобы сдвиг фаз между токами, циркулирующими в двух обмотках статора, создавал дисбаланс между прямым и обратным крутящим моментом. Такой сдвиг фаз возможен из-за омико-емкостного характера одной из обмоток (из-за наличия конденсатора).
Так как вспомогательная обмотка может отключаться на фиксированной скорости, индукционная машина с конденсаторным запуском может быть разделена на топологию постоянного конденсатора (рисунок 4) и топологию пускового конденсатора (рисунок 5).
Рисунок 4.
Асинхронный двигатель с постоянным конденсатором.
Рис. 5.
Однофазный асинхронный двигатель с конденсаторным пуском.
Для двигателя с конденсаторным пуском значение емкости выбирается для достижения желаемых пусковых характеристик, в то время как для двигателей с постоянным конденсатором это, как правило, является результатом компромисса между характеристиками при различных условиях нагрузки.
В SPIMS с расщепленными полюсами вспомогательная обмотка вместо этого состоит из двух короткозамкнутых обмоток, намотанных вокруг полюсных наконечников. Угол ψ варьируется путем изменения количества короткозамкнутых витков до достижения желаемой производительности.
3.2. Анализ однофазного асинхронного двигателя
Основываясь на распределении плотности потока в воздушном зазоре в разделе 3.1.2, можно вычислить ЭДС, индуцированную в обмотках статора и ротора. После этого получается электромагнитный момент и, наконец, выводится эквивалентная схема.
3.2.1. Результирующая плотность потока в воздушном зазоре
Плотность потока в воздушном зазоре является суммой распределения плотности потока обмоток статора и клетки:
E14
, где Bstator и Bcage могут быть получены из формул. (10) и (11):
E15
, где Ifs и Ifr являются прямым и обратным компонентами системы токов статора, соответственно. Если подавление обратного потока не является идеальным, амплитуды этих составляющих тока будут разными.То же самое и с клеткой.
В синусоидальном установившемся режиме основная гармоника плотности потока в воздушном зазоре:
E16
3.2.2. Обратные ЭДС статора
ЭДС одной обмотки статора можно получить, суммируя ЭДС каждой катушки.
E17
где D — диаметр станка; zνi — количество проводников в пазу.
ЭДС, индуцированная в обмотках статора, может быть оценена как:
E18
, где было принято следующее уравнение:
3.3. Обратные ЭДС ротора
ЭДС в стержнях ротора получаются так же, как и раньше.
E19
ЭДС, индуцированная в каждом стержне ротора, представляет собой сумму двух синусоидальных составляющих с пульсацией ( ω + pωr ) e ( ω — pωr ):
E20
3.4. Выражение для электромагнитного момента
Электромеханический крутящий момент можно оценить как:
E21
с B ( α, t ) распределение индукции в воздушном зазоре и Θ r ( α, t ) плотность тока ротора:
E22
где ∆ Fr ( α, t ) — MMF, вызванная только токами ротора:
E23
Eq.22 становится:
E24
Подставляя уравнение. 24 и уравнение. 16 в уравнении. 21 и, наконец, решая, получается выражение для электромагнитного момента:
E25
, где было принято следующее уравнение: Если = Ifs + ρIfr и Ib = фунтов + ρIbr .
Следовательно, электромагнитный момент в однофазном асинхронном двигателе представляет собой сумму трех членов:
Прямой электромагнитный момент:
Обратный электромагнитный момент:
Электромагнитный момент с пульсацией 2 ω :
3.5. Математическая модель
Математическая модель SPIM получена путем рассмотрения основной гармоники распределения плотности потока в воздушном зазоре.
Рисунок 6.
Подключение к сети однофазного асинхронного двигателя с конденсаторным пуском.
Полные сопротивления двух цепей (рисунок 6), включая внешний импеданс, составляют: Z 1 = R 1 + jX 1 и Z t 2 = R 2 + Rc + j ( X 2 + Xc ).
Токи I 1 и I 2 могут быть выражены как функция прямой и обратной составляющих токов статора:
E26
E27
Уравнения, относящиеся к различным цепям эквивалентных схем, следующие:
, где
E28
, где
Наконец, вызывается выражение электромагнитного момента.
E29
3.6. Эквивалентная схема однофазного асинхронного двигателя
Уравнения, которые определяют математическую модель однофазного асинхронного двигателя со вспомогательной обмоткой и внешним импедансом, могут быть графически преобразованы в эквивалентные схемы.
Ссылаясь на модели Eqs. (28) после некоторых манипуляций можно записать:
E30
4. Синхронный двигатель с постоянным магнитом с линейным запуском
Модель линейного двигателя с постоянным магнитом выводится ниже на основе модели затененных — полюсная машина без вспомогательной обмотки.
4.1. Распределение плотности потока обмотки статора в воздушном зазоре
В однофазной машине с пар полюсов p магнитное поле в воздушном зазоре фиксировано в пространстве и изменяется во времени из-за конструкции двигателя и его обмотки.Таким образом, обмотка якоря не может создавать вращающееся поле во времени и пространстве. Первая гармоника магнитного поля статора может быть записана как:
E31
, где K равно
E32
с форм-фактором f , что составляет
E33
в случае прямоугольной магнитодвижущей силы ( MMF). Уравнение плотности потока обмотки статора:
E34
Это поле можно разделить на две составляющие, а именно прямое и обратное поле.
4.2. Полная плотность потока в воздушном зазоре SPLSPMM
Плотность потока в воздушном зазоре однофазных синхронных двигателей с постоянным пуском от сети складывается из двух составляющих: плотности потока обмотки статора и распределения плотности потока постоянного магнита ударов в минуту . В некоторых случаях может быть добавлена неполная беличья клетка для улучшения пусковых характеристик и добавлено дополнительное распределение плотности потока Bc :
Bpαt = Bs + Bc + BpmE35
с:
E36
E37
E38
В синусоидальном установившемся режиме и скорости ротора ωr , один имеет:
E39
, где Ifs и Ibs представляют прямую и обратную составляющие тока статора.Каждая компонента плотности потока дает вклад в обратную ЭДС.
Более точной моделью SPLSPMM является модель Ref. [14], который основан на [1]. Модель анализирует SPLSPMM с асимметричной обмоткой статора, вспомогательной обмоткой и PM на роторе, вызывающих торможение и пульсирующие моменты. Модель основана на сочетании симметричных компонентов и теории оси d-q. Для двигателя без вспомогательной обмотки симметричный компонент Vq равен нулю, а Vd = 2Vm.В синхронном установившемся состоянии прямое напряжение синхронизируется с ротором, и модель можно упростить, используя среднее значение кажущегося импеданса по оси d, тогда как часть оси q не требуется. Результирующая модель компонента по оси d в установившемся состоянии представлена в виде эквивалентной схемы рисунка 7 для SPIM и рисунка 8 для SPLSPMM.
Рисунок 7.
Эквивалентная схема однофазной индукционной машины.
Рисунок 8.
Эквивалентные схемы однофазной машины SPLSPMM, где Z1 — импеданс статора; Xmd — реактивное сопротивление намагничивания по оси d относительно обмотки статора (основной); R r I — сопротивление ротора относительно обмотки статора; X r I — реактивное сопротивление утечки ротора относительно обмотки статора; БЭДС — эквивалентная обратная ЭДС, вызванная наличием магнитов; Z2 — это среднее значение кажущегося импеданса по оси d Z2 = [Z1 + jXmd] + [jXmd // (Rrl / 2 + jXrl)] [14].
5. Выбор оптимальной конфигурации
5.1. Технические характеристики машины и моделирование поля без нагрузки
Различные конфигурации машины были численно сопоставлены с помощью метода конечных элементов (FEM). Все конфигурации используют один и тот же сердечник статора, который совпадает с сердечником SPIM, используемого в качестве эталона, в то время как количество, тип и форма магнитов ротора различны. На роторе имеется неполная клетка, чтобы улучшить пусковые характеристики двигателя.
В таблице 1 приведены основные размеры и технические характеристики рассматриваемых двигателей. Обмотка выполнена из 1723 витков медным проводом 0,2 мм, материал обоймы — алюминий.
| Элемент | Размер |
|---|---|
| Высота статора | 67,6 мм |
| Ширина статора | 84,6 мм |
| 0.4 мм | |
| Длина ламинации | 19 мм |
| Полюса | 2 |
| Обороты | 1723 |
Таблица 1.
Основные размеры и характеристики прототипов
Первая конфигурация напрямую заимствована у асинхронного двигателя с экранированными полюсами и включает в себя два поверхностных магнита NdFeB. Модель двигателя FEM с контуром плотности потока показана на рисунке 9 (а). Объем магнитов, необходимых для этой конструкции, является значительным, а также стоимость изготовления выше, чем у следующих решений; поэтому он будет включен сюда только для полноты картины.Неполная клетка используется для обеспечения запуска во всех конфигурациях.
Рис. 9.
Моделирование методом конечных элементов без нагрузки. (а) Результат моделирования FEM первой конфигурации ротора с двумя поверхностными магнитами NdFeB (модель 1). (b) Результат моделирования методом МКЭ второй конфигурации ротора с двумя вставленными магнитами NdFeB (модель 2). (c) Третья конфигурация ротора с четырьмя результатами моделирования NdFeB (позиция 1) (модель 3). (d) Конфигурация с четырьмя магнитами NdFeB (позиция 2), результат моделирования (модель 4).(e) Конфигурация с двумя магнитами NdFeB и двумя керамическими магнитами (позиция 1), результат моделирования (модель 5).
Вторая конфигурация аналогична первой, она состоит из двух магнитов NdFeB, но вместо того, чтобы монтироваться на поверхности, они скрыты внутри ротора. Модель двигателя FEM с контуром плотности потока представлена на рисунке 9 (б).
Третья конфигурация основана на второй и включает в себя еще два вставных магнита NdFeB для увеличения поля на оси d- ротора.Модель двигателя FEM с контуром плотности потока представлена на рисунке 9 (c).
Для дальнейшего исследования роли средних магнитов предлагается четвертая конфигурация. Он такой же, как и третий, хотя два средних магнита расположены ближе к воздушному зазору. Модель двигателя FEM с контуром магнитной индукции представлена на рисунке 9 (d).
Наконец, представлена недорогая конфигурация. Такая же, как и в третьей конфигурации; он оснащен двумя керамическими средними магнитами вместо вставных магнитов из NdFeB.Модель двигателя FEM с контуром плотности магнитного потока этой конфигурации представлена на рисунке 9 (e).
5.2. Потоковая связь
Потоковая связь рассчитывается численно для каждой из вышеуказанных структур. Потоковые связи различных конфигураций показаны на рисунке 10.
Рисунок 10.
Потоковые связи различных конструкций для разных положений ротора.
Видно, что, хотя первая конфигурация обеспечивает самую высокую потокосцепление, между другими конфигурациями нет существенной разницы.Исходя из соображений стоимости, следует отдавать предпочтение конфигурациям 2 и 4.
Выбранная конфигурация показана на Рисунке 1 и Рисунке 9 (b) с двумя магнитами NdFeB класса 32, встроенными в ротор. Эта конфигурация обеспечивает максимальную плотность магнитного потока с минимальным увеличением стоимости производства машины. Кроме того, эту конфигурацию проще всего производить.
Обратную ЭДС можно рассчитать по потокосцеплениям как:
E40
Используя уравнение. В (40) обратная ЭДС рассчитывается для полного вращения ротора и извлекается ее среднеквадратичное значение.С другой стороны, тенденции для прогнозируемой обратной ЭДС показаны на рисунке 11. Среднеквадратичное значение обратной ЭДС в зависимости от скорости (для различных решений) показано на рисунке 12. Можно заметить, что тенденция является ожидаемой. , примерно линейно. Эти значения сравниваются с экспериментальными результатами в разделе 6 (для выбранного решения).
Рисунок 11.
Прогнозируемые обратные ЭДС в зависимости от модели положения ротора 1, 2, 3, 4, 5.
Рисунок 12.
Обратные ЭДС для различных скоростей ротора разные решения.
6. Экспериментальные испытания
Для сравнения характеристик SPLSPMM с SPIM, SPLSPMM был поставлен с однофазным инвертором, реализующим линейное изменение В / Гц.
6.1. Идентификация параметров SPLSPMM
Для получения параметров модели машины и изучения ее характеристик были проведены испытания как без нагрузки, так и под нагрузкой. Испытательный стенд показан на рисунке 13.
Рисунок 13.
Испытательный стенд.
Параметры эквивалентной схемы, полученные в результате испытаний, показаны в Таблице 2, а на Рисунке 14 показан тренд реактивного сопротивления намагничивания как функции напряжения (который был реализован в математической модели).
| Параметр | Значение | |
|---|---|---|
| Rs | 76,37 Ом | |
| Xs | 40,21 Ом r62 905 905 905 905 905 905 72,19 905 905 905 905 905 905 905 905 905 905 | 20,10 Ом |
| Xmd | 113,34 Ом |
Таблица 2.
Параметры эквивалентной цепи.
Рисунок 14.
Реактивное сопротивление намагничивания как функция напряжения.
Для испытания на обрыв цепи машина соединена с асинхронной машиной, и клеммы испытуемого двигателя (MUT) разомкнуты. Напряжения на клеммах измеряются при различных значениях скорости. Тенденция среднеквадратичных амплитуд обратных ЭДС приблизительно линейна, как показано на рисунке 15. На этом же рисунке можно убедиться, что аналитически предсказанная тенденция очень близка к экспериментальным результатам. Небольшие различия вызваны производственным процессом (который, возможно, привел к ухудшению свойств магнита) и математическими приближениями.
Рисунок 15.
Сравнение обратных ЭДС.
Значение и форма сигнала обратной ЭДС при 2710 об / мин (45,2 Гц) показаны на рисунке 16. С учетом той же рабочей точки выполняется моделирование FEA, и поведение машины показано на рисунке 11.
Рис. 16.
Измеренная обратная ЭДС в зависимости от положения ротора.
Прогнозируемые и экспериментальные среднеквадратичные значения напряжения совпадают, а формы обратных ЭДС примерно одинаковы, за исключением большей пульсации, представленной экспериментальными данными, которая связана с прорезью обоймы ротора.
В таблице 3 номинальная рабочая точка машины с расщепленными полюсами сравнивается с двумя рабочими точками прототипа. Учитывая фиксированную частоту 50 Гц и переменное напряжение, максимальный крутящий момент достигается при питании двигателя напряжением 230 В, а максимальная эффективность достигается при питании напряжением 190 В. Дополнительные результаты показаны в разделе 6.2.