Схема подключения синхронного двигателя переменного тока
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.

- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов.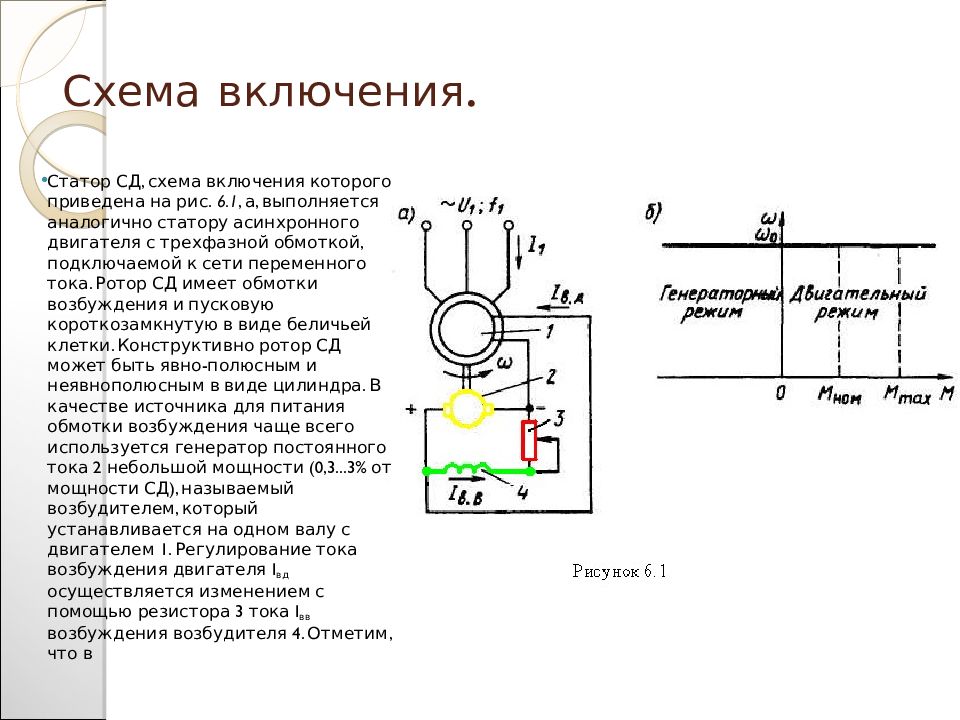 Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Схемы управления синхронными двигателями можно условно разделить на релейно-контакторные, применяемые для пуска, синхронизации с сетью и останова нерегулируемых по скорости электроприводов, и схемы с силовыми преобразователями, предназначенные для регулирования переменных ЭП с синхронными двигателями.
Релейно-контакторные схемы управления двигателей кроме операций по включению и отключению двигателя, ограничению пусковых токов и его синхронизации с сетью должны обеспечивать и соответствующее регулирование тока возбуждения. Электротехническая промышленность выпускает широкую номенклатуру типовых панелей и шкафов управления для синхронных двигателей различных мощностей и уровней номинального напряжения.
Электротехническая промышленность выпускает широкую номенклатуру типовых панелей и шкафов управления для синхронных двигателей различных мощностей и уровней номинального напряжения.
Типовая схема управления возбуждением двигателя в функции скорости. Подключение обмотки возбуждения к источнику питания UB осуществляется контактором КМ2 (рис. 6.10, а), который управляется реле скорости KR. Катушка этого реле связана с частью разрядного резистора Rp через диод VD.
При включении контактора КМ1 (его цепи управления на рисунке не показаны) обмотка статора двигателя подключается к сети переменного тока и образует вращающееся магнитное поле, под действием которого он начнет разбег и которое наведет ЭДС в обмотке возбуждения двигателя. Под действием ЭДС по катушке реле KR начнет протекать выпрямленный ток, оно включится и разомкнет цепь питания контактора КМ2. Разбег двигателя будет происходить без тока возбуждения с закороченной на разрядный резистор Rp обмоткой возбуждения.
По мере роста скорости ротора его ЭДС и ток в катушке реле KR, снижаются. При подсинхронной скорости ток в катушке реле KR станет меньше тока отпускания, реле отключится и вызовет тем самым включение контактора КМ2. Контактор КМ2 подключит обмотку возбуждения к источнику питания. Далее происходит процесс синхронизации СД с сетью.
Схема управления возбуждением двигателя в функции тока (рис. 6.10, б) содержит реле тока КА, обмотка которого питается от трансформатора тока ТА, и реле времени КТ. При подключении двигателя к сети контактором КМ1 в цепи обмотки статора возникает бросок пускового тока, что приводит к срабатыванию реле КА. Контакт этого реле замыкает цепь питания реле времени КТ, что вызывает отключение контактора возбуждения КМ2. Разбег двигателя, как и в предыдущем случае, осуществляется с закороченной на разрядный резистор Rp обмоткой возбуждения.
Рис. 6.10. Схемы управления пуском двигателя с использованием принципа
6.10. Схемы управления пуском двигателя с использованием принципа
скорости (а) и тока (б)
В конце пуска при подсинхронной скорости двигателя и уменьшении тока в статоре реле КА отключается и катушка реле времени КТ теряет питание. Через заданную выдержку времени включается контактор КМ2, и через его контакты обмотка возбуждения подключается к источнику питания U , после чего двигатель втягивается в синхронизм.
Отметим, что в рассмотренных схемах после срабатывания контактора возбуждения КМ2 разрывается цепь разрядного резистора Rp, что облегчает тепловой режим его работы и повышает экономичность схемы.
Электротехническая промышленность выпускает типовые панели и шкафы управления синхронными двигателями разных типов. Рассмотрим в качестве примера схему одной из таких панелей.
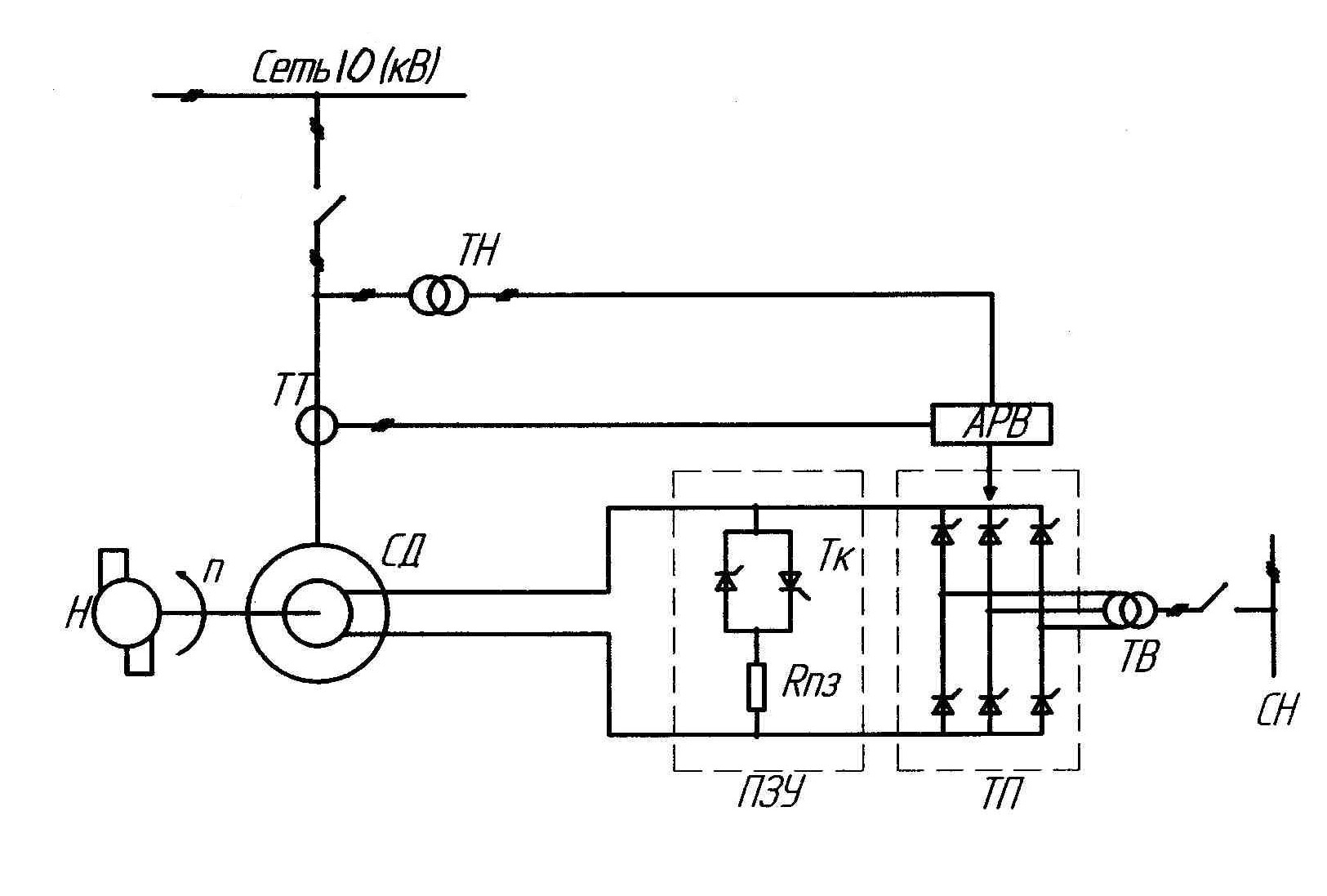
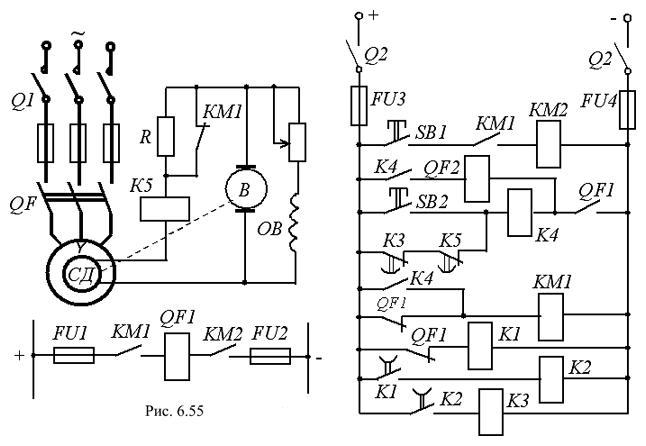
Схема типовой панели ПУ 7502управления низковольтным синхронным двигателем приведена на рис. 6.11. Панель управления обеспечивает прямой (без токоограничения) пуск с глухоподключенным возбудителем G и форсировку возбуждения при снижении уровня питающего напряжения.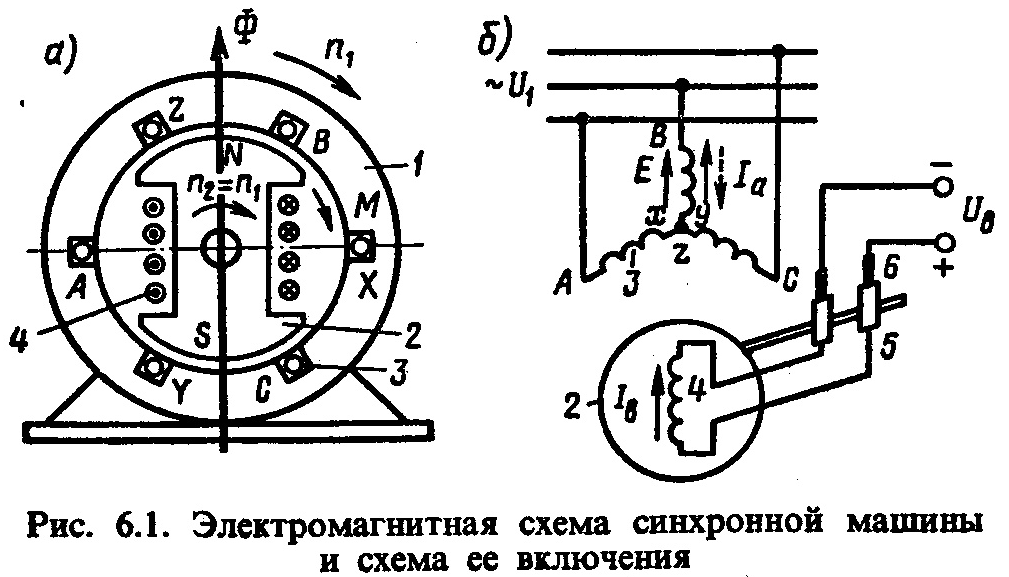 В схеме предусмотрены также защиты: тепловая (реле КК и трансформаторы тока ТА1 и ТА2), токовая (автоматы QF1 и QF2), от снижения напряжения сети переменного тока (реле KV2, KV3) и постоянного тока (реле KV1).
В схеме предусмотрены также защиты: тепловая (реле КК и трансформаторы тока ТА1 и ТА2), токовая (автоматы QF1 и QF2), от снижения напряжения сети переменного тока (реле KV2, KV3) и постоянного тока (реле KV1).
Пуск двигателя может быть осуществлен только при нормальных уровнях питающих схему напряжений постоянного и переменного тока. В этом случае, если рукоятка командоконтроллера SA находится в среднем положении и включены автоматы QF1 и QF2, срабатывают реле напряжения KV2, KV3 и реле времени КТ, что подготавливает схему к пуску двигателя.
При переводе рукоятки SA в положение «Включено» срабатывает реле KV1 и катушка линейного контактора КМ1 подключается к ис-
Рис. 6.11. Схема синхронного электропривода с использованием типовой панели управления
точнику питания, к обмотке статора двигателя подводится напряжение переменного тока, и он начинает разбег.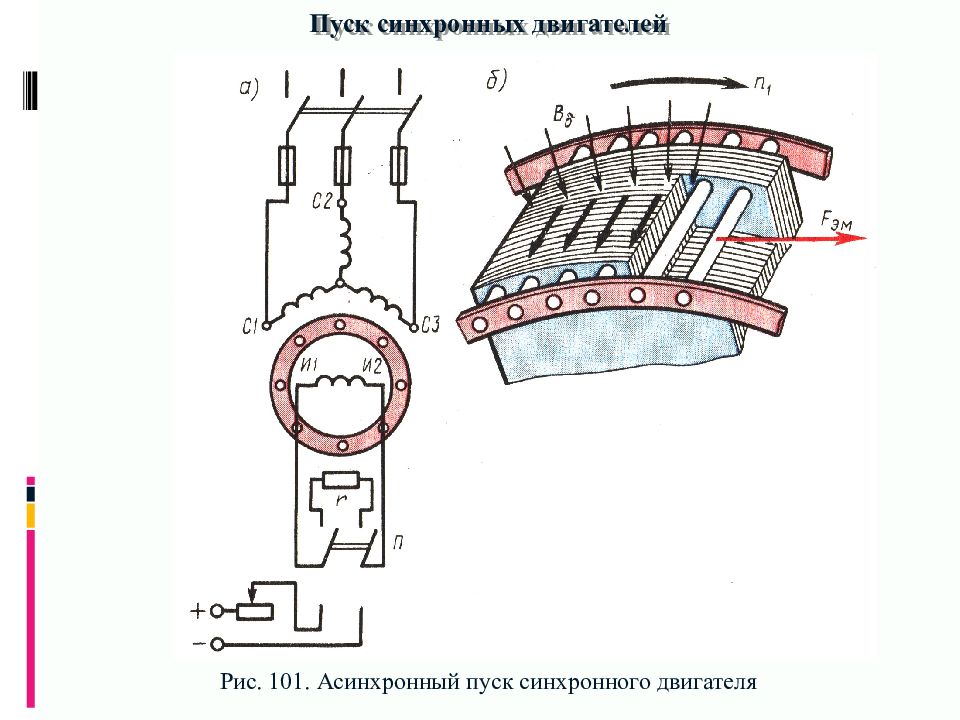 При подсинхронной скорости происходит возбуждение возбудителя G и соответственно двигателя, который втягивается в синхронизм.
При подсинхронной скорости происходит возбуждение возбудителя G и соответственно двигателя, который втягивается в синхронизм.
При резком снижении питающего напряжения происходит включение контактора КМ2, который при этом шунтирует резистор форсировки /?ф. В результате возрастают токи возбуждения возбудителя и двигателя, увеличивается его ЭДС, что приводит к увеличению максимального момента и соответственно перегрузочной способности двигателя. О включении контактора форсировки КМ2 сигнализирует указательное реле КН.
Для контроля тока статора двигателя в схеме предусмотрен амперметр РА1, а тока возбуждения — амперметр РА2, питаемый от шунта RS.
Замкнутая схема ЭП с вентильным двигателем, предназначенная для регулирования его скорости (рис. 6.12), построена по принципу подчиненного регулирования координат и включает в себя управляемый выпрямитель УВ, коммутатор (инвертор) К, реактор L, регуляторы тока РТ и скорости PC, датчики тока ДТ, скорости ДС и положения ДП. Схема обеспечивает механические характеристики ЭП, аналогичные показанным на рис. 5.36, б.
Схема обеспечивает механические характеристики ЭП, аналогичные показанным на рис. 5.36, б.
По замкнутым структурам построены схемы автоматического регулирования возбуждения (АРВ) синхронных двигателей.
Рис. 6.12. Замкнутая схема вентильного двигателя
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
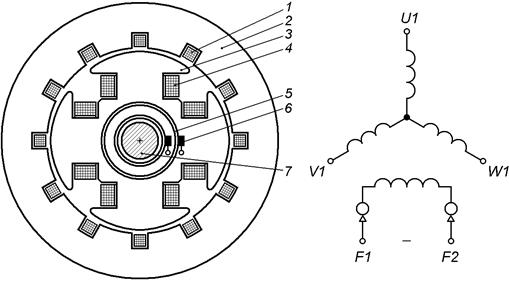
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором.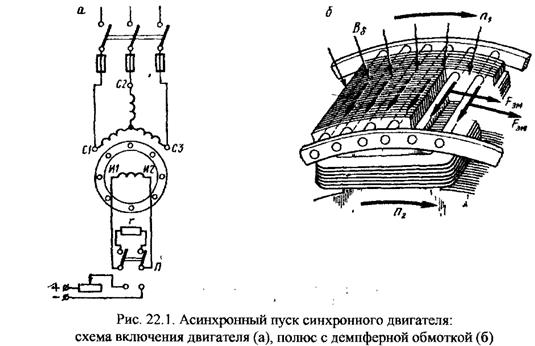 Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.

Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Схема подключения синхронного электродвигателя
5.1. Схема включения, статические характеристики и режимы работы синхронного двигателя
Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных рабочих машин и механизмов, что объясняется их высокими технико-экономическими показателями.
1.Синхронные двигатели имеют высокий коэффициент мощностиcos, равный единице для электроприводов небольшой мощности и опережающийcosв установках большой мощности. Способность СД работать с опережающимcosи отдавать в сеть реактивную мощность позволяет улучшать режим работы и экономичность сети электроснабжения.
2.Высокий КПД современных СД, составляющий 96–98 %, что на 1–1,5 % выше КПД АД тех же габаритов и скорости.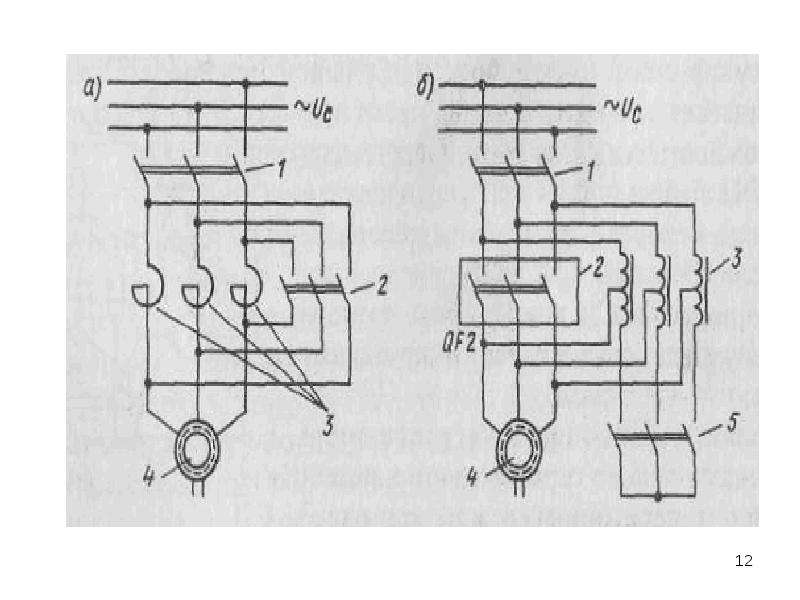
3.Возможность регулирования перегрузочной способности СД за счет регулирования тока возбуждения и меньшая зависимость этого показателя от напряжения сети по сравнению с АД.
4.Синхронный двигатель обладает абсолютно жесткой механической характеристикой.
5.Важным преимуществом конструкции СД является большой воздушный зазор, вследствие чего его характеристики и свойства мало зависят от износа подшипников и неточности монтажа ротора.
6.Возможность их изготовления на очень большие мощности (до нескольких десятков мегаватт и более).
На рис. 5.1 приведена схема включения СД. На статоре СД, выполненном аналогично статору АД, располагается трехфазная обмотка, подключенная к сети переменного тока.
Для того чтобы разобраться, как подключить электродвигатель конкретного типа, необходимо понимать принципы его работы и особенности конструкции. Существует множество электродвигателей разных типов. По способу подключения к сети переменного тока они бывают трехфазные, двухфазные или однофазные.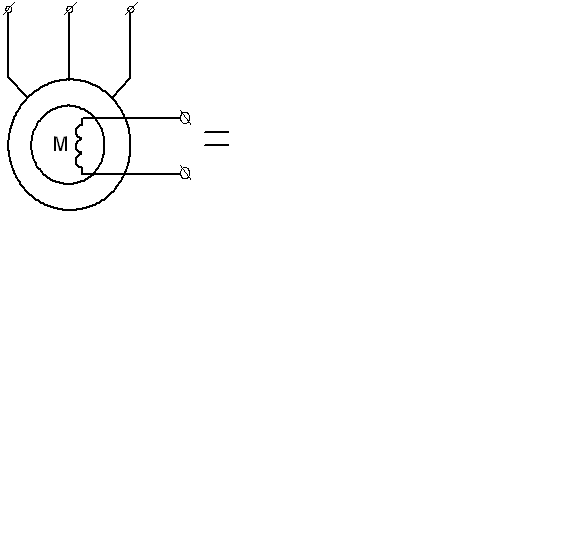
Принцип действия
Принцип действия электродвигателя демонстрирует простейший опыт, который всем нам показывали в школе — вращение рамки с током в поле постоянного магнита.
Рамка с током — это аналог ротора, неподвижный магнит — статор. Если в рамку подать ток, она повернется перпендикулярно направлению магнитного поля и застынет в этом положении. Если заставить магнит крутиться, рамка будет вращаться с той же скоростью, то есть синхронно с магнитом. У нас получился синхронный электродвигатель. Но у нас магнит — это статор, а он по определению неподвижен. Как заставить вращаться магнитное поле неподвижного статора?
Для начала заменим постоянный магнит катушкой с током. Это обмотка нашего статора. Как известно из той же школьной физики, катушка с током создает магнитное поле. Последнее пропорционально величине тока, а полярность зависит от направления тока в катушке. Если подать в катушку переменный ток, получим переменное поле.
Магнитное поле — векторная величина. Переменный ток в питающей сети имеет синусоидальную форму.
Нам поможет очень наглядная аналогия с часами. Какие векторы вращаются постоянно перед нашими глазами? Это часовые стрелки. Представим, что в углу комнаты висят часы. Секундная стрелка вращается, делая один полный оборот в минуту. Стрелка — вектор единичной длины.
Тень, которую стрелка отбрасывает на стену, меняется как синус с периодом в 1 минуту, а тень, отбрасываемая на пол — как косинус. Или синус, сдвинутый по фазе на 90 градусов. Но вектор равен сумме своих проекций. Другими словами, стрелка равна векторной сумме своих теней.
Двухфазный синхронный электродвигатель
Расположим на статоре две обмотки под углом в 90 градусов, то есть взаимно перпендикулярно. Подадим в них синусоидальный переменный ток. 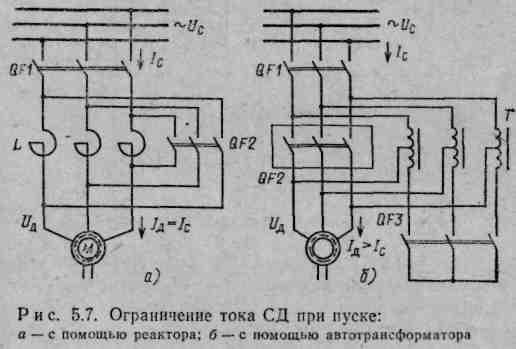 Суммарный вектор будет вращаться подобно часовой стрелке, делая один полный оборот за период частоты переменного тока.
Суммарный вектор будет вращаться подобно часовой стрелке, делая один полный оборот за период частоты переменного тока.
У нас получился двухфазный синхронный электродвигатель. Откуда взять токи, сдвинутые по фазе для питания обмоток? Наверное, не всем известно, что вначале распределительные сети переменного тока были двухфазными. И лишь позднее, не без борьбы, уступили место трехфазным. Если бы не уступили, то наш двухфазный электромотор можно было подключить напрямую к двум фазам.
Но победили трехфазные сети, для которых были разработаны трехфазные электродвигатели. А двухфазные электромоторы нашли свое применение в однофазных сетях в виде конденсаторных двигателей.
Трехфазный синхронный двигатель
Современные распределительные сети переменного тока выполнены по трехфазной схеме.
- По сети передаются сразу три синусоиды со сдвигом фаз на треть периода или на 120 градусов относительно друг друга.
- Трехфазный двигатель отличается от двухфазного тем, что у него не две, а три обмотки на статоре, повернутых на 120 градусов.
- Три катушки, подключенные к трем фазам, создают в сумме вращающееся магнитное поле, которое поворачивает ротор.
Трехфазный асинхронный двигатель
Ток в ротор синхронного двигателя подается от источника питания. Но мы знаем из той же школьной физики, что ток в катушке можно создать переменным магнитным полем. Можно просто замкнуть концы катушки на роторе. Можно даже оставить всего один виток, как в рамке. А ток пусть индуцирует вращающееся магнитное поле статора.
- В момент старта ротор неподвижен, а поле статора вращается.
- Поле в контуре ротора меняется, наводя электрический ток.
- Ротор начнет догонять поле статора. Но никогда не догонит, так как в этом случае ток в нем перестанет наводиться.
- В асинхронном двигателе ротор всегда вращается медленнее магнитного поля.
- Разница скоростей называется скольжением. Подключение асинхронного двигателя не требует подачи тока в обмотку ротора.
У синхронных и асинхронных электродвигателей есть свои достоинства и недостатки, но факт состоит в том, что большинство двигателей, применяемых в промышленности на сегодняшний день — это асинхронные трехфазные двигатели.
Однофазный асинхронный электродвигатель
Если оставить на роторе короткозамкнутый виток, а на статоре одну катушку, то мы получим удивительную конструкцию — асинхронный однофазный двигатель.
На первый взгляд кажется, что такой двигатель работать не должен.
Объяснить работу этого двигателя можно, представив неподвижное переменное магнитное поле статора как сумму двух полей, вращающихся навстречу друг другу. Пока ротор неподвижен, эти поля уравновешивают друг друга, поэтому однофазный асинхронный двигатель не может стартовать самостоятельно. Если же ротор внешним усилием привести в движение, он будет вращаться попутно с одним вектором и навстречу другому.
Попутный вектор будет тянуть ротор за собой, встречный — тормозить.
Можно показать, что из-за разности встречной и попутной скоростей влияние попутного вектора будет сильнее, и двигатель будет работать в асинхронном режиме.
Схема включения
Возможно подключение нагрузок к трехфазной сети по двум схемам — звездой и треугольником. При подключении звездой начала обмоток соединяются между собой, а концы подключаются к фазам. При включении треугольником конец одной обмотки подключается к началу другой.
В схеме включения звездой обмотки оказываются под фазным напряжением 220 В., при включении треугольником — под линейным 380 В.
При включении треугольником двигатель развивает не только большую мощность, но и большие пусковые токи. Поэтому иногда используют комбинированную схему — старт звездой, затем переключение в треугольник.
Направление вращения определяется порядком подключения фаз. Для изменения направления достаточно поменять местами любые две фазы.
Подсоединение к однофазной сети
Трехфазный двигатель можно включать в однофазную сеть, хотя и с потерей мощности, если одну из обмоток подключить через фазосдвигающий конденсатор. Однако при таком включении двигатель сильно теряет в своих параметрах, поэтому этот режим использовать не рекомендуется.
Однако при таком включении двигатель сильно теряет в своих параметрах, поэтому этот режим использовать не рекомендуется.
Подключение на 220 вольт
Емкость рабочего конденсатора рассчитывается по формулам для номинального рабочего режима. Но при отличии режима от номинального, например, при пуске баланс обмоток нарушается. Для обеспечения пускового режима на время старта и разгона параллельно рабочему подключается дополнительный пусковой конденсатор, который должен отключаться при выходе на номинальные обороты.
Как включить однофазный асинхронный двигатель
 Особенностью этого типа является невозможность автоматического старта.
Особенностью этого типа является невозможность автоматического старта.Для автоматического пуска используется вторая пусковая обмотка как в двухфазном электромоторе. Пусковая обмотка подключается через пусковой конденсатор только для старта и после этого должна быть отключена вручную или автоматически.
Статьи по электроремонту и электромонтажу
Синхронные движки получили обширное распространение в индустрии для электроприводов, работающих с неизменной скоростью (компрессоров, насосов и т.д.). В ближайшее время, вследствие возникновения преобразовательной полупроводниковой техники, разрабатываются регулируемые синхронные электроприводы.
Плюсы синхронных электродвигателей
Синхронный движок несколько труднее, чем асинхронный, но обладает рядом
преимуществ, что позволяет использовать его в ряде всевозможных случаев заместо асинхронного.
1. Главным достоинством синхронного электродвигателя является возможность
получения рационального режима по реактивной энергии , который осуществляется
методом автоматического регулирования тока возбуждения мотора. Синхронный
Синхронный
движок может работать, не потребляя и не отдавая реактивной энергии в сеть,
при коэффициенте мощности ( cos фи)
равным единице.Если для предприятия нужна выработка реактивной энергии, то
с и нхронный электродвигатель, работая с перевозбуждением,
может отдавать ее в сеть.
2. Синхронные электродвигатели наименее чувствительны к
колебаниям напряжения сети, чем асинхронные электродвигатели. Их
наибольший момент пропорционален напряжению сети, в то время как критичный
момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высшую перегрузочную
способность. Не считая того, перегрузочная способность синхронного мотора
может быть автоматом увеличена за счет увеличения тока возбуждения, к примеру,
при резком краткосрочном повышении нагрузки на валу мотора.
4. Скорость вращения синхронного мотора остается
постоянной при хоть какой нагрузке на валу в границах его перегрузочной возможности.
Методы запуска синхронного электродвигателя
Вероятны последующие методы запуска синхронного мотора: асинхронный запуск на полное напряжение сети и запуск на пониженное напряжение через реактор либо автотрансформатор.
Асинхронный запуск синхронного электродвигателя
Схема возбуждения синхронного мотора с глухоподключенным возбудителем достаточно ординарна и может применяться в этом случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс
Асинхронный запуск синхронного мотора делается присоединением статора к сети. Движок разгоняется как асинхронный до скорости вращения, близкой к синхронной.
В процессе асинхронного запуска обмотка возбуждения замыкается на разрядное сопротивление, чтоб избежать пробоя обмотки возбуждения при пуске, потому что при малой скорости ротора в ней могут появиться значимые перенапряжения. При скорости вращения, близкой к синхронной, срабатывает контактор КМ (цепь питания контактора на схеме не показана), обмотка возбуждения отключается от разрядного сопротивления и подключается к якорю возбудителя.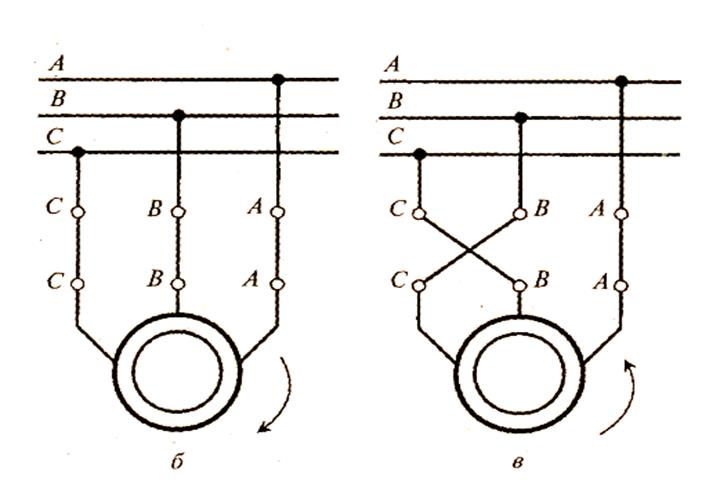 Запуск завершается.
Запуск завершается.
Типовые узлы схем возбуждения синхронного мотора
Слабеньким местом большинства электроприводов с синхронными движкам, существенно
усложняющим эксплуатацию и повышающим издержки, многие годы являлся
электромашинный возбудитель. В текущее время обширное распространение для
возбуждения синхронных движков находят тиристорные возбудители . Они
поставляются в комплектном виде.
Тиристорные возбудители синхронных электродвигателей более надежны и имеют
более высочайший к.п.д. по сопоставлению с электромашинными возбудителями. С помощью их
просто решаются вопросы рационального регулирования тока возбуждения для
поддержания всепостоянства cos фи, напряжения на шинах,
от которых питается синхронный движок, также ограничение токов ротора и
статора синхронного мотора в аварийных режимах.
Тиристорными возбудителями оснащается большая часть выпускаемых больших
синхронных электродвигателей. Они делают обычно последующие функции:
- запуск синхронного мотора с включенным в цепь обмотки возбуждения
пусковым резистором, - бесконтакное отключение пускового резистора после окончания запуска
синхронного мотора и защиту его от перегрева, - автоматическую подачу возбуждения в подходящий момент запуска синхронного
электродвигателя, - автоматическое и ручное регулирование тока возбуждения
- нужную форсировку возбуждения при глубочайших посадках напряжения на
статоре и резких набросах нагрузки на валу синхронного мотора, - резвое гашение поля синхронного мотора по мере надобности понижения
тока возбуждения и отключениях электродвигателя, - защиту ротора синхронного мотора от долговременной перегрузки по току и
маленьких замыканий.
Если запуск синхронного электродвигателя делается на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора.
Может быть подключение обмотки возбуждения мотора к якорю возбудителя поочередно с разрядным сопротивлением.
Процесс подачи возбуждения синхронному движку автоматизируется 2-мя методами: в функции скорости и в функции тока.
На схеме, приведенной на рисунке, подача возбуждения синхронному движку осуществляется при помощи электрического реле неизменного тока КТ (реле времени с гильзой). Катушка реле врубается на разрядное сопротивление Rразр через диодик VD. При подключении обмотки статора к сети в обмотке возбуждения мотора наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения.
Подача возбуждения синхронному движку в функции скорости
При пуске скольжение S = 1. По мере разгона мотора оно миниатюризируется и интервалы меж выпрямленными полуволнами тока растут; магнитный поток равномерно понижается по кривой Ф(t).
По мере разгона мотора оно миниатюризируется и интервалы меж выпрямленными полуволнами тока растут; магнитный поток равномерно понижается по кривой Ф(t).
При скорости, близкой к синхронной, магнитный поток реле успевает добиться значения потока отпадания реле Фот в момент, когда через реле КТ ток не проходит. Реле теряет питание и своим контактом делает цепь питания контактора КМ (на схеме цепь питания контактора КМ не показана).
Разглядим контроль подачи возбуждения в функции тока при помощи реле тока. При пусковом токе срабатывает реле тока КА и размыкает собственный контакт в цепи контактора КМ2.
График конфигурации тока и магнитного потока в реле времени КТ
Контроль подачи возбуждения синхронному движку в функции тока
При скорости, близкой к синхронной, реле КА отпадает и замыкает собственный контакт в цепи контактора КМ2. Контактор КМ2 срабатывает, замыкает собственный контакт в цепи возбуждения машины и шунтирует резистор Rразр
Как подключить однофазный двигатель
Сегодня мы рассмотрим подключение однофазного двигателя переменного тока. К таким относят асинхронные и синхронные моторы, питающиеся от одной фазы, которая обычно имеет напряжение 220 Вольт. Они очень распространены в бытовой сфере и мелком производстве, частном предпринимательстве.
К таким относят асинхронные и синхронные моторы, питающиеся от одной фазы, которая обычно имеет напряжение 220 Вольт. Они очень распространены в бытовой сфере и мелком производстве, частном предпринимательстве.
Подключение однофазного асинхронного двигателя
Для разгона асинхронного двигателя требуется создать вращающееся магнитное поле. С этим легко справляется трехфазный источник питания, где фазы сдвинуты друг относительно друга на 120 градусов. Но если речь идет о том, как подключить однофазный электродвигатель, то встает проблема: без сдвига фаз вал не начнет вращаться.
Внутри однофазного асинхронного мотора располагаются две обмотки: пусковая и рабочая. Если обеспечить сдвиг фаз в них, то магнитное поле станет вращающимся. А это главное условие для запуска электродвигателя. Сдвигать фазы можно путем добавочного сопротивления (резистора) или индуктивной катушки. Но чаще всего используют емкости – пусковой и/или рабочий конденсаторы.
С пусковой емкостью
В большинстве случаев схема включает в себя только пусковой конденсатор. Он активен только во время запуска мотора. Поэтому способ хорош, когда пуск обещает быть тяжелым, в противном случае вал не сможет разгоняться из-за небольшого начального момента. После разгона пусковой конденсатор отключается, и работа продолжается без него.
Он активен только во время запуска мотора. Поэтому способ хорош, когда пуск обещает быть тяжелым, в противном случае вал не сможет разгоняться из-за небольшого начального момента. После разгона пусковой конденсатор отключается, и работа продолжается без него.
Схема подключения двигателя со вспомогательной емкостью представлена на рисунке выше. Для ее реализации вам потребуется реле или, как минимум, одна кнопка, которую вы будете зажимать на 3 секунды во время запуска мотора в ход. Вспомогательный конденсатор вместе со вспомогательной обмоткой включаются в цепь лишь на некоторое время.
Такая схема обеспечивает оптимальный начальный крутящий момент, если имеют место незначительные броски переменного тока во время пуска. Но есть и недостаток – при работе в номинальном режиме технические характеристики падают. Это обусловлено формой магнитного поля рабочей обмотки: оно у нее овальное, а не круговое.
С рабочей емкостью
Если пуск легкий, а работа тяжелая, то вместо пускового конденсатора понадобится рабочий. Схема подключения показана ниже. Особенность заключается в том, что рабочая емкость вместе с рабочей обмоткой включена в цепь постоянно.
Схема подключения показана ниже. Особенность заключается в том, что рабочая емкость вместе с рабочей обмоткой включена в цепь постоянно.
Схема обеспечивает хорошие характеристики при работе в номинальном режиме.
С обоими конденсаторами
Компромиссное решение – использование вспомогательной и рабочей емкости одновременно. Этот способ идеален, если двигатель переменного тока пускается в ход уже с нагрузкой, и сама работа тяжела для него. Посмотрите, схема ниже – это словно две схемы (с рабочей и вспомогательной емкостью), наложенные друг на друга. При запуске на несколько секунд будет включаться пусковой механизм, а второй накопитель будет активен все время: от пуска до завершения работы.
Расчет емкостей
Наибольшую сложность для начинающих представляет расчет емкости конденсаторов. Профессионалы подбирают их опытным путем, прислушиваясь к мотору во время запуска и работы. Так они определяют, подходит накопитель, или нужно поискать другой. Но с небольшой погрешностью в большинстве случаев емкость можно рассчитать так:
- Для рабочего накопителя: 0,7-0,8 мкФ на 1000 Ватт мощности электрического двигателя;
- Для пускового конденсатора: больше в 2,5 раза.

Пример: у вас асинхронный однофазный электродвигатель на 2 кВт. Это 2000 Ватт. Значит, при подключении с рабочей емкостью нужно запастись накопителем 1,4-1,6 мкФ. Для пусковой потребуется 3,5-4 мкФ.
Подключение однофазного синхронного электродвигателя
Несмотря на сложность конструкции синхронных двигателей, они имеют много преимуществ перед асинхронными. Главное – это низкая чувствительность к скачкам напряжения, ведущих к резкому уменьшению или увеличению силы тока. Не менее значим и тот факт, что синхронные моторы могут работать даже с перегрузкой, не говоря уже об оптимальном режиме реактивной энергии и вращении вала с постоянной скоростью. Однако подключение – трудоемкий процесс, и это уже недостаток.
Метод разгона
Нельзя пустить в ход однофазный синхронный двигатель, просто подав питание на его обмотки. Потому что в момент включения направление питающего тока в статорных намотках соответствует рисунку (а). В это время на ротор, который еще находится в состоянии покоя, действует пара сил, которая будет пытаться крутить вал по часовой стрелке. Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Но через половину периода в статорных намотках ток поменяет свое направление. Поэтому пара сил будет уже действовать в обратном направлении, поворачивая вал против часов стрелки, как на рисунке (б). Поскольку ротор обладает большой инертностью, он так и не сдвинется с места.
Чтобы заставить ротор вращаться, необходимо, чтобы он успевал сделать хотя бы половину оборота, чтобы изменение направления тока не повиляло на его вращение. Это возможно, если разогнать вал при помощи посторонних сил. Это можно сделать двумя путями:
- Вручную;
- С использованием второго двигателя.
Собственной силой рук можно разогнать только маломощные синхронные электродвигатели. А для средне- и высокомощных агрегатов придется использовать другой мотор.
При разгоне с посторонней силой ротор начинает вращаться со скоростью, близкой к синхронной. Потом только включается обмотка возбуждения, и затем – статорная намотка.
Асинхронный пуск синхронного мотора
Если в наконечниках на полюсах ротора уложены стержни из металла, и они соединены между собой по бокам кольцами, то мотор должен запускаться асинхронным методом. Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Эти стержни играют роль вспомогательной обмотки, которая есть у асинхронного двигателя. При этом намотку возбуждения закорачивают с помощью разрядного резистора, а статорную обмотку подключают к сети. Только так можно обеспечить такой же разгон, как и у асинхронного электродвигателя. Но после того, как скорость вращения максимально приблизится к синхронной (достаточно 95% от нее), намотку возбуждения соединяют с источником постоянного тока. Скорость становится полностью синхронной, что влечет за собой снижение ЭДС индукции вспомогательной обмотки вплоть до нуля. И она отключается автоматически.
Важно! Вспомогательные металлические стержни должны обладать высоким активным сопротивлением. В противном случае пусковой момент будет недостаточным для разгона ротора. А закорачивать намотку возбуждения необходимо по одной простой причине: если этого не сделать, то у нее в момент пуска случится пробой, потому что она задает вращение в том же направление, что и пусковая обмотка.

Схема и способ подключения вашего двигателя будет зависеть от того, какой он у вас: синхронный или асинхронный. В учет идет также мощность мотора, а также способ пуска: с нагрузкой или без. Разобраться в рисунках вам поможет элементарное понимание механики и электромагнитных явлений.
Принцип работы и строение синхронного электродвигателя
Каков принцип работы синхронного двигателя? Что вам необходимо знать о нем? Как правильно использовать, чтобы ремонт электродвигателя понадобился как можно позже? Эту статью мы составили специально для наших клиентов (как существующих, так и будущих).
Каково строение синхронного двигателя? Какие основные свойства вам необходимо знать и иметь в виду?
- Оборудование не является самозапускающимся механизмом. Это значит, что для его работы требуется внешнее вмешательство/воздействие. В противном случае система не сможет начать работу на определенной синхронной скорости.
- Системы могут применяться для увеличения фактора силы. Благодаря уникальному строению и функциональным решениям синхронный двигатель может работать в условиях любых коэффициентов мощности.
- Двигатель имеет синхронный с частотой электрической сети принцип работы. Это значит, что на вашем объекте обязательно нужно подумать о наличии бесперебойного источника питания, который позволил бы двигателю работать с постоянной заданной скоростью.
Ключевые характеристики синхронных двигателей
Электромеханическое устройство, способное преобразовать электрическую энергию в механическую — ключевая характеристика. Строение синхронного двигателя мало чем отличается от того же 3-фазного асинхронного двигателя. Основным исключением является разве что принцип подачи постоянного тока (он идет на ротор).
В зависимости от типа подключения можно выделить оборудование 2-х видов:
- Однофазное
- Трехфазное.
Все трехфазные решения дополнительно разделяются на несколько подтипов. К примеру, на рынке представлены синхронные или асинхронные (также можно встретить и другое название – индукционные) решения.
Принцип работы синхронного двигателя
Чтобы вам проще было понять основные направления, мы представим информацию в кратком и схематичном виде. Если у вас появляются вопросы, то смело можете связаться с нашим специалистом. Опытный мастер расскажет о принципе действия, даст ответы на ваши вопросы, разъяснит те моменты, которые показались вам сложными и непонятными.
Мы работаем для того, чтобы вам было удобно!
- Требуется создание электронно-магнитного поля.
- Для этого в оборудовании используется 2 электрических ввода (обмотка и ротор).
- Обмотка статора включает 3 фазы, которые отвечают за процесс вращения магнитного потока.
- На ротор подается постоянный ток, здесь же и производится постоянный поток.
ВАЖНО ЗНАТЬ! Механика проста и понятна: если частота составляет 50 Гц, то в таком случае трехфазному потоку необходимо будет вращаться 3 тысячи оборотов на 60 секунд. Путем простых вычислений становится понятно, что для работы системы нужно 50 оборотов за 1 секунду. Принцип работы синхронного двигателя предусматривает возникновение явления так называемой инерции силы. Чтобы преодолеть ее, требуется сильное механическое воздействие.
Запускаем синхронный двигатель в работу
Оборудование не является самозапускающимся механизмом, о чем мы уже и указывали выше. Для удобства клиентов и заказчиков могут предусматриваться разные способы запуска:
- С помощью вспомогательного двигателя. В таком случае требуется надежное и прочное соединение; как только магнитное поле замыкается, то связь с «запускающим» двигателем прекращается.
- Через асинхронный пуск. Принцип работы синхронного двигателя предусматривает использование дополнительной короткозамкнутой обмотки.
Надеемся, вам стало более понятно и ясно, в каком направлении работать дальше, каких требований и критериев придерживаться.
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
Синхронные мини-мотор-редукторы 220 В ZHENG MOTOR
Синхронные двигатели с редуктором 220 В
Предлагаем малогабаритные синхронные мини-мотор-редукторы с питанием от сети переменного тока 220 В. Синхронный двигатель простой по своей конструкции, надежный и доступный по цене, редукторы для таких моторов, как правило, также недорогие. Скорость вращения ротора синхронного мотора равна частоте питающего напряжения. Такие электродвигатели могут использоваться как без редуктора (50 об/мин для сети 50 Гц), так и с редуктором, что позволяет получить достаточно малые скорости на выходе редуктора при небольших передаточных числах. Мы поставляем и поддерживаем на складе синхронные мотор-редукторы компании Zhejiang Zhengke Electromotor (ZHENG Motor), очень хорошо зарекомендовавшие себя по качеству. Мотор-редукторы могут использоваться вместо отечественных синхронных двигателей с редуктором типа СД-54 и других, ранее производившихся в нашей стране.
Применение синхронных двигателей с редуктором
Мотор-редукторы используются в различном полиграфическом оборудовании, в рекламных конструкциях, в малогабаритных поворотных столиках, вращателях рекламных материалов, в ламинаторах, генераторах льда, в спортивных тренажерах, в мини-приборах, в осветительном оборудовании. Также находят свое применение малогабаритные синхронные моторы в бытовой техничке — микроволновых печах, посудомоечных машинах, в автоматизированных грилях, машинах для производства попкорна, электрических каминах и т.д. Везде, где требуется вращение с постоянной малой скоростью и небольшой нагрузкой, синхронный двигатель с редуктором незаменим и очень привлекателен по цене.
Схема подключения синхронного двигателя
Синхронные двигатели с редуктором разных производителей могут иметь различные варианты подключения. Для моторов ZHENG, которые мы предлагаем, выведены из корпуса обе обмотки двигателя — кроме серии 49TYZ. Направление вращения возможно изменять подачей питающего напряжения в разные точки схемы. Для серии 49TYZ есть два варианта исполнения — либо вращение с постоянной скоростью только в одном из двух направлений (только по часовой стрелке или только против часовой стрелки, указывается при заказе) либо вращение поочередно — то в одном направлении, то в другом. При последнем варианте направление вращения переключается механически (за счет редуктора). Если мотор-редуктор делает полный оборот, то при следующем выключении и включении направление вращения изменяется на противоположное. Такая схема подходит для задач, где не важно направление вращения, но нужно его поочередно изменять, например, в микроволновке. Электрически определять направление невозможно, из мотора выходят только два вывода.
Купить маломощные синхронные мотор-редукторы с доставкой по России
Приобрести мини-мотор-редукторы с доставкой вы можете, заказав нужные модели через корзину товаров или написав нам на почту, также у нас работает бесплатная горячая телефонная линия для клиентов, звонок на номер бесплатный для звонков из России. Для каждой модели синхронного двигателя с редуктором у нас в каталоге есть подробное описание, чертежи, существенные технические характеристики, фото, отзывы и другая полезная информация. Все очень удобно для выбора подходящего вам варианта. Помогут при выборе мотор-редуктора фильтры, которые расположены в левой части каталога — цена, наличие, мощность, скорость вращения выходного вала редуктора и др.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Мы узнали о различных типах электродвигателей в нашей предыдущей статье. Теперь мы начнем узнавать об этих моторах индивидуально. В этой статье мы рассмотрим теорию работы синхронного двигателя и его строение, а так же подскажем где вы можете купить.
Принцип синхронного двигателя
Основной принцип такой же, как и для всех двигателей. Это взаимная индукция между обмоткой статора и ротора, которая делает любой двигатель работоспособным. Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.
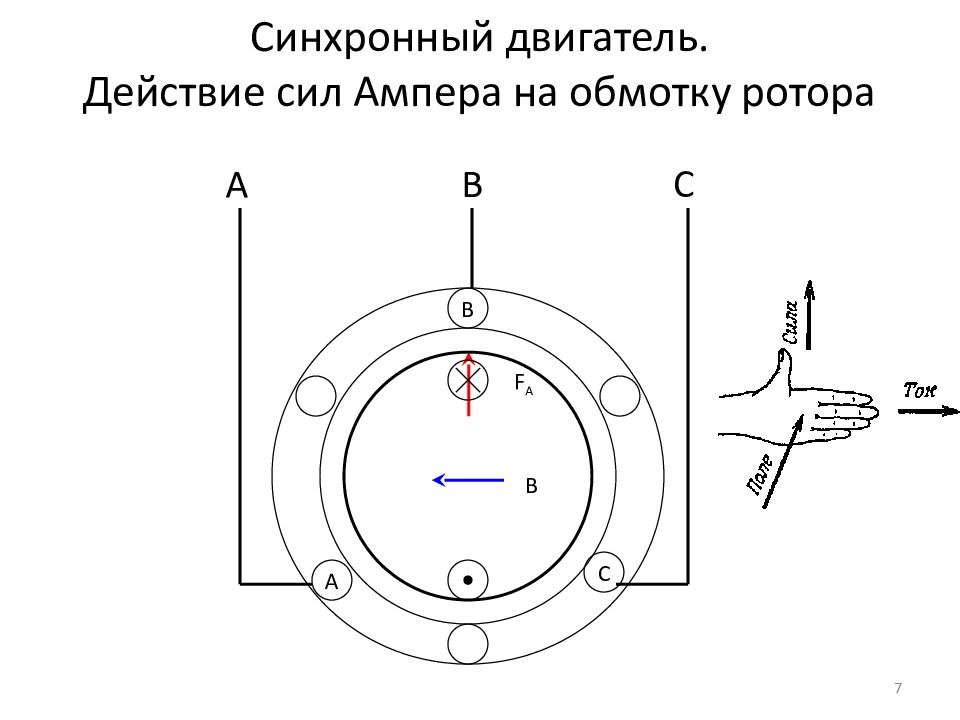
Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса в статоре и роторе. Как показано на рисунке, статор имеет два полюса Ns и S. Эти полюса, находясь под напряжением, создают вращающееся магнитное поле. Они вращаются с синхронной скоростью и позволяют считать направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, то полюса отталкиваются друг от друга. Итак, северный полюс в статоре отталкивает северный полюс ротора. Также южный полюс статора отталкивает юг ротора. Это заставляет ротор вращаться в направлении против часовой стрелки. Таким образом, через полпериода полюса статора меняются местами, что приводит их в положение противоположенных полюсов, которые притягивают друг друга . Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.
В этом положении полюсы Ns притягивают S, а полюсы Ss притягивают N. Эти противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает изменяться с быстрой скоростью и реверсированием, полюса ротора также вращаются и поворачиваются так же, как и статор, таким образом вызывая вращение ротора с постоянной, синхронной скоростью и в том же направлении. Приобрести синхронный двигатель можно, перейдя по ссылке ниже:
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Синхронный двигатель: эквивалентная схема и фазовая диаграмма
Эквивалентная схема для одной фазы синхронного двигателя показана на рисунке 1. Она аналогична эквивалентной схеме синхронного генератора , но с двумя отличиями.
Во-первых, он был перевернут, чтобы показать систему питания как вход для двигателя, а, второй , ток в двигателе считается положительным.
Система питания обычно представляет собой бесконечную шину, потому что двигатель намного меньше остальной части системы питания.Когда поле ротора вращается с синхронной скоростью, в обмотки якоря наводится противодействующая ЭДС (C-EMF), E a , . Написание уравнения контура напряжения дает
$ \ begin {matrix} {{V} _ {t}} = {{E} _ {a}} + jI {{X} _ {s}} & {} & \ left (1 \ right) \\\ end {matrix} $
Что может быть преобразовано в
$ \ begin {matrix} {{E} _ {a}} = {{V} _ {t}} — jI { {X} _ {s}} & {} & \ left (2 \ right) \\\ end {matrix} $
РИСУНОК 1: Пофазная эквивалентная схема для синхронного двигателя.
Фазорная диаграмма синхронного двигателяУравнение 2 является предпочтительной формой, поскольку напряжение на клеммах обычно выбирается в качестве опорного вектора для целей построения векторной диаграммы. Зная напряжение на клеммах, мы можем построить векторную диаграмму для синхронного двигателя, как показано на рисунке 2. Рисунок 2 (a) показывает векторную диаграмму для запаздывающего тока.
РИСУНОК 2: Диаграммы синхронного двигателя.
- Запаздывающий ток.
- Ведущий ток.
Поскольку двигатель является нагрузкой, запаздывающий ток означает, что электродвигатель принимает запаздывающий ток и, таким образом, действует как индуктивная нагрузка. Падение напряжения на синхронном реактивном сопротивлении составляет -jIX s . Оператор -j представляет собой поворот на 90 ° по часовой стрелке, поэтому падение напряжения синхронного реактивного сопротивления перпендикулярно току в показанном направлении.
Обнаружено, что результирующая С-ЭДС отстает от напряжения на клеммах на дельту угла мощности (δ).Из векторной диаграммы на рисунке 2 (a) мы можем заметить, что
$ \ begin {matrix} {{E} _ {a}} \ cos \ delta <{{V} _ {t}} & {} & \ left (3 \ right) \\\ end {matrix} $
Это означает, что двигатель работает в условиях недостаточного возбуждения, потребляя реактивную мощность от бесконечной шины.
На рис. 2 (б) показана векторная диаграмма двигателя, работающего с опережающим током. Поскольку двигатель принимает опережающий ток, он действует как емкостная нагрузка. В этом случае генерируемое напряжение по-прежнему отстает от напряжения на клеммах на угол мощности, но величина генерируемого напряжения теперь больше, чем напряжение на клеммах, или, более конкретно,
$ \ begin {matrix} {{E} _ {a}} \ cos \ delta> {{V} _ {t}} & {} & \ left (4 \ right) \\\ end {matrix} $
В этом случае двигатель перевозбужден и обеспечивает реактивную мощность бесконечного автобуса.
Синхронные двигатели обычно рассчитаны на выдачу определенной мощности при работе с определенным значением коэффициента мощности.
Наиболее распространенными номинальными значениями коэффициента мощности для синхронных двигателей являются единицы и 0,8 . Двигатель, рассчитанный на коэффициент мощности 0,8, очевидно, будет больше и дороже, чем двигатель, рассчитанный на единичный коэффициент мощности, потому что и проводники якоря, и проводники возбуждения должны будут пропускать больший ток при более низком коэффициенте мощности.
При работе с коэффициентом мощности меньше единицы синхронный двигатель почти наверняка будет работать в опережающем направлении.
Конструкция, принцип работы, эквивалентная схема
СИНХРОННЫЕ ДВИГАТЕЛИ
Следует напомнить, что генератор постоянного тока может работать как двигатель постоянного тока. Таким же образом генератор переменного тока может работать как двигатель, подключив его обмотку якоря к трехфазному источнику питания. Тогда это называется синхронным двигателем. Как следует из названия, синхронный двигатель работает с синхронной скоростью (Ns = 120f / P), то есть синхронно с вращающимся полем, создаваемым трехфазным источником питания.Таким образом, скорость вращения зависит от частоты источника. Поскольку частота фиксирована, скорость двигателя остается постоянной независимо от нагрузки или напряжения трехфазного источника питания. Однако синхронные двигатели используются не так часто, потому что они работают с постоянной скоростью (т. Е. Синхронной скоростью), но они нашли очень полезное применение, поскольку они обладают другими уникальными электрическими свойствами.
Общая физическая концепцияПредположим, что обмотка якоря (размещенная в статоре) трехфазной синхронной машины подключена к подходящему сбалансированному трехфазному источнику и полю. обмотка на D.Источник номинального напряжения C. Ток, протекающий через катушки возбуждения, создаст стационарные магнитные полюса с чередованием севера и юга. С другой стороны, трехфазные токи, протекающие в обмотке якоря, создают вращающееся магнитное поле, вращающееся с синхронной скоростью. Другими словами, в статоре будут перемещаться северный и южный полюса из-за трехфазных токов, то есть в любом месте статора в какой-то момент времени будет северный полюс, а через некоторое время он станет южным полюсом. период, соответствующий половине цикла.(через время = 1/2 f , где f = частота питания). Предположим, что неподвижный южный полюс ротора выровнен с северным полюсом статора, движущегося по часовой стрелке в определенный момент времени, как показано на рисунке ниже. Эти два полюса притягиваются и пытаются поддерживать это выравнивание (согласно закону Ленца), и, следовательно, полюс ротора пытается следовать за полюсом статора, поскольку условия подходят для создания крутящего момента в направлении по часовой стрелке.Однако ротор не может двигаться мгновенно из-за своей механической инерции, поэтому ему требуется некоторое время, чтобы переместиться. Между тем, полюс статора быстро (продолжительность, соответствующая половине цикла) изменит свою полярность и станет южным полюсом. Таким образом, сила притяжения больше не будет присутствовать, и вместо этого одинаковые полюса испытывают силу отталкивания, как показано на рис. Другими словами, теперь условия подходят для создания крутящего момента против часовой стрелки. Даже это состояние не продлится дольше, поскольку полюс статора снова изменится на северный полюс через время 1/2 f .Таким образом, на ротор будет действовать переменная сила, которая пытается перемещать его по часовой стрелке и против часовой стрелки с удвоенной частотой подачи, то есть с интервалами, соответствующими 1/2 f секунд. Поскольку эта продолжительность довольно мала по сравнению с механической постоянной времени ротора, ротор не может реагировать и двигаться в любом направлении. Ротор продолжает оставаться в неподвижном состоянии.
Напротив, если ротор доводится до почти синхронной скорости каким-либо внешним устройством, скажем, небольшим двигателем, установленным на том же валу, что и ротор, полюса ротора блокируются на противоположных полюсах статора и ротор продолжает вращаться с синхронной скоростью, даже если питание двигателя отключено.Таким образом, синхронный ротор не может начать вращаться сам по себе, когда на ротор и статор подается номинальное напряжение и частота, и, следовательно, синхронный двигатель не имеет пускового момента. Таким образом, должны быть сделаны некоторые специальные меры внутри машины или снаружи машины, чтобы ротор был приближен к своей синхронной скорости. В это время, если на якорь подается электроэнергия, ротор может двигаться в такт и продолжать работать с синхронной скоростью.
Синхронный двигатель — это машина, которая работает с синхронной скоростью и преобразует электрическую энергию в механическую.По сути, это генератор переменного тока, работающий как двигатель. Подобно генератору переменного тока, синхронный двигатель состоит из следующих двух частей:
(i) статор, в котором трехфазная обмотка якоря размещена в пазах сердечника статора и который получает питание от трехфазного источника питания [см. ( Рисунок: )].
(ii) ротор, который имеет набор выступающих полюсов, возбуждаемых постоянным током для образования чередующихся полюсов N и S. Катушки возбуждения соединены последовательно с двумя контактными кольцами, и постоянный ток подается в обмотку от внешнего возбудителя, установленного на валу ротора.Статор намотан на такое же количество полюсов, что и полюсы ротора. Как и в случае с асинхронным двигателем, количество полюсов определяет синхронную
скорость двигателя,
Ns = 120 f / P
Где
f = частота мощности в Гц P = количество полюсов
Важным недостатком синхронного двигателя является то, что он не самозапускается, и для его запуска необходимо использовать вспомогательные средства.
Принцип работыТот факт, что синхронный двигатель не имеет пускового момента, можно легко объяснить.
(i) Рассмотрим трехфазный синхронный двигатель с двумя полюсами ротора NR и SR. Тогда статор также будет намотан на два полюса NS и SS. На обмотку ротора подается постоянное напряжение, а на обмотку статора подается трехфазное напряжение.Обмотка статора создает вращающееся поле, которое вращается вокруг статора с синхронной скоростью Ns (= 120 f / P). Постоянный ток (или ток нулевой частоты) создает двухполюсное поле, которое остается неподвижным до тех пор, пока ротор не вращается. Таким образом, мы имеем ситуацию, в которой существует пара вращающихся полюсов якоря (т.е. NS — SS) и пара неподвижных полюсов ротора (т.е. NR — SR).
(ii) Предположим, что в любой момент полюса статора находятся в положениях A и B, как показано на рисунке: Ясно, что полюса NS и NR отталкиваются друг от друга и также полюса СС и СР.Следовательно, ротор стремится двигаться против часовой стрелки. После периода полупериода (или 1/2 f = 1/100 секунды) полярности полюсов статора меняются на противоположные, но полярности полюсов ротора остаются такими же, как показано на рисунке: Теперь SS и NR притягиваются друг к другу, и поэтому делаю НС и СР. Следовательно, ротор стремится двигаться по часовой стрелке. Поскольку полюса статора меняют свою полярность быстро, они имеют тенденцию тянуть ротор сначала в одном направлении, а затем после периода полупериода в другом.Из-за большой инерции ротора двигатель не запускается. Следовательно, синхронный двигатель не имеет момента самозапуска, т.е. синхронный двигатель не может запуститься сам по себе.
Эквивалентная схемаВ отличие от асинхронного двигателя, синхронный двигатель подключен к двум электрическим системам; постоянный ток источник на выводах ротора и переменный ток. система на выводах статора.
1 . В нормальных условиях работы синхронного двигателя поле статора не наводит напряжение в роторе, поскольку обмотка ротора вращается с той же скоростью, что и поле статора.В обмотке ротора присутствует только наведенный постоянный ток, и омическое сопротивление этой обмотки является единственным противодействием этому, как показано на рис. (I).
2. В обмотке статора необходимо учитывать два эффекта: влияние поля статора на обмотку статора и влияние поля ротора, разрезающего проводники статора с синхронной скоростью.
(i) Влияние поля статора на проводники статора (или якоря) учитывается путем включения индуктивного реактивного сопротивления в обмотку якоря.Это называется синхронным реактивным сопротивлением Xs. Сопротивление Ra следует рассматривать как последовательное с этим реактивным сопротивлением, чтобы учесть потери меди в статоре или обмотке якоря, как показано на рисунке: (i). Это сопротивление в сочетании с синхронным реактивным сопротивлением дает синхронный импеданс машины.
(ii) Второй эффект заключается в том, что напряжение генерируется в обмотке статора синхронно вращающимся полем ротора, как показано на Рис. 2.23 (i). Это сгенерировало e.м.ф. Eb известен как back e.m.f. и противодействует напряжению статора V. Величина Eb зависит от скорости ротора и потока ротора ф на полюс. Поскольку скорость ротора постоянна; значение Eb зависит от потока ротора на полюс, т. е. возбуждающего тока ротора If.
На рис. 2.23 (i) показана принципиальная схема одной фазы синхронного двигателя, соединенного звездой, а на рис. 2.23 (ii) показана его эквивалентная схема. Обратимся к эквивалентной схеме на рис: 2.23 (ii).
Напряжение сети / фаза в обмотке статора составляет
Er = V — разность векторов Eb
Ток / фаза якоря,
Эта эквивалентная схема значительно помогает понять работу синхронного двигателя.Синхронный двигатель называется нормально возбужденным, если возбуждение поля такое, что Eb = V. Если возбуждение поля такое, что Eb
Принцип работы синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя.Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает индукцию магнитного поля в статоре и роторе двигателя. Основная цель возбуждения — преобразовать статор и ротор в электромагнит.
Трехфазное питание индуцирует северный и южный полюса статора. Трехфазное питание синусоидальное.Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Магнитное поле возникает на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной , и, таким образом, на роторе возникает стационарное магнитное поле. Термин «стационарный» означает, что их северный и южный полюсы остаются неизменными.
Скорость вращения вращающегося магнитного поля известна как синхронная скорость . Синхронная скорость двигателя зависит от частоты источника питания и количества полюсов двигателя.
N S = 120f / P
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения. Сила притяжения развивает крутящий момент против часовой стрелки. Крутящий момент — это сила, которая перемещает объект во вращение.Таким образом, полюса ротора тянулись к полюсам статора.
После каждого полупериода полюс статора меняется на противоположное. Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться в одном положении.
Когда одинаковые полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и крутящий момент развивается по часовой стрелке.
Давайте разберемся в этом с помощью схемы.Для простоты рассмотрим, что у двигателя два полюса. На рисунке ниже противоположные полюсы статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
Неоднонаправленный крутящий момент вызывает пульсацию ротора только в одном месте, и по этой причине синхронный двигатель не запускается автоматически.
Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Скорость двигателя фиксированная, и двигатель постоянно вращается с синхронной скоростью.
Синхронный двигатель — производство и работа
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.Конструкция синхронного двигателя аналогична генератору переменного тока. Та же самая синхронная машина может использоваться как синхронный двигатель или как генератор переменного тока. Синхронные двигатели доступны в широком диапазоне, обычно мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об / мин.Конструкция синхронного двигателя
Конструкция синхронного двигателя (с явнополюсным ротором) показана на рисунке слева. Как и любой другой двигатель, он состоит из статора и ротора.Сердечник статора изготовлен из тонкой кремниевой пластинки и изолирован поверхностным покрытием, чтобы минимизировать потери на вихревые токи и гистерезис. Внутри статора имеются осевые пазы, в которых размещена трехфазная обмотка статора. Статор намотан трехфазной обмоткой на определенное количество полюсов, равное полюсам ротора.Ротор в синхронных двигателях в основном является явнополюсным. Питание постоянного тока на обмотку ротора подается через контактные кольца. Постоянный ток возбуждает обмотку ротора и создает электромагнитные полюса.В некоторых случаях также можно использовать постоянные магниты. На рисунке выше очень кратко проиллюстрирована конструкция синхронного двигателя .
Работа синхронного двигателя
Статор намотан на такое же количество полюсов, что и ротор, и питается от трехфазного источника переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле в статоре. Обмотка ротора питается от источника постоянного тока, который намагничивает ротор. Рассмотрим двухполюсную синхронную машину , как показано на рисунке ниже.- Теперь полюса статора вращаются с синхронной скоростью (скажем, по часовой стрелке). Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первом схематическом рисунке выше), тогда полюса статора и ротора будут отталкиваться друг от друга, и создаваемый крутящий момент будет против часовой стрелки .
- Полюса статора вращаются с синхронной скоростью, они вращаются очень быстро и меняют свое положение. Но очень скоро ротор не сможет вращаться на тот же угол (из-за инерции), и следующая позиция, вероятно, будет второй схемой на приведенном выше рисунке.В этом случае полюса статора будут притягивать полюса ротора, и создаваемый крутящий момент будет по часовой стрелке.
- Следовательно, на ротор будет действовать быстро меняющийся крутящий момент, и двигатель не запустится.
Характерные особенности синхронного двигателя
- Синхронный двигатель будет работать либо с синхронной скоростью, либо не будет работать вообще.
- Единственный способ изменить его скорость — это изменить его частоту питания. (Поскольку Ns = 120f / P)
- Синхронные двигатели не запускаются автоматически. Им нужна некоторая внешняя сила, чтобы приблизить их к синхронной скорости.
- Они могут работать при любом коэффициенте мощности, как отстающем, так и опережающем. Следовательно, синхронные двигатели могут использоваться для улучшения коэффициента мощности.
Применение синхронного двигателя
- Поскольку синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности, его можно использовать для улучшения коэффициента мощности. Синхронный двигатель без нагрузки с опережающим коэффициентом мощности подключается к энергосистеме, в которой нельзя использовать статические конденсаторы.
- Используется там, где требуется высокая мощность при низкой скорости.Такие как прокатные станы, измельчители, смесители, насосы, насосы, компрессоры и т. Д.
| Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного отсчета времени, таких как хронометраж, (часы) и магнитофоны. Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность — в течение нескольких месяцев.
Это связано с тем, что операторы электростанции намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока.Если он отстает на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не теряют время.
Большие и малые синхронные двигатели
Выше 10 лошадиных сил (10 кВт), более высокий КПД и ведущий коэффициент мощности делают большие синхронные двигатели полезными в промышленности. Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Поскольку двигатели и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве двигателя и, наоборот, использовать двигатель в качестве генератора.
Асинхронный двигатель подобен генератору переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На рисунке ниже могут быть показаны либо два параллельно подключенных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в действие синхронный двигатель. Или это могут быть два двигателя, если подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать с одинаковой номинальной частотой и находиться в фазе друг с другом.То есть они должны быть синхронизированы . Процедура синхронизации двух генераторов переменного тока заключается в следующем: (1) размыкание переключателя, (2) приведение в действие обоих генераторов с одинаковой скоростью вращения, (3) ускорение или замедление фазы одного блока до тех пор, пока оба выхода переменного тока не будут в фазе, (4) замыкание выключатель до того, как они сойдут по фазе.
После синхронизации генераторы переменного тока будут заблокированы друг с другом, что потребует значительного крутящего момента, чтобы отделить один блок (не синхронизированный) от другого.
Синхронный двигатель, работающий синхронно с генератором
Учет крутящего момента с синхронными двигателями
Если больший крутящий момент в направлении вращения приложен к ротору одного из вышеупомянутых вращающихся генераторов переменного тока, угол ротора будет увеличиваться (противоположно (3)) по отношению к магнитному полю в катушках статора, пока все еще синхронизирован и ротор подает энергию в сеть переменного тока, как генератор переменного тока.
Ротор также будет выдвинут относительно ротора другого генератора. Если нагрузка, такая как тормоз, приложена к одному из вышеуказанных устройств, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
Если применяется чрезмерный крутящий момент или сопротивление, ротор превысит максимальный угол крутящего момента , продвигаясь или запаздывая, так что синхронизация будет потеряна. Крутящий момент развивается только при сохранении синхронизации двигателя.
Доведение синхронных двигателей до скорости
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации для генераторов переменного тока. Однако синхронный двигатель не запускается автоматически и должен быть доведен до приблизительной электрической скорости генератора переменного тока, прежде чем он синхронизируется с частотой вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронизм с источником питания переменного тока и развивать крутящий момент.
Синхронный привод синхронный двигатель
Предполагая, что двигатель развивает синхронную скорость, когда синусоидальная волна меняется на положительную на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, в то время как верхняя южная катушка притягивает северный полюс ротора. Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в точке (2), крутящий момент, удерживающий северный полюс ротора вверх, является максимальным.Этот крутящий момент уменьшается по мере уменьшения синусоидальной волны до 0 В постоянного тока в точке (3) с минимальным крутящим моментом.
Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая северный полюс ротора. Подобным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В точке (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоидальная волна изменяется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоидальной волны.
Обратите внимание: на приведенном выше рисунке показано положение ротора в режиме холостого хода (α = 0 °). На практике нагрузка на ротор приведет к тому, что ротор будет отставать от положений, показанных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α = 90 °.
Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует с переменной полярностью.
Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием.Поскольку поле катушки пульсирует и не вращается, необходимо увеличить скорость ротора с постоянными магнитами с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, похожий на те, что описаны в следующем разделе.
Добавление полюсов снижает скорость
2-полюсный (пара полюсов N-S) генератор будет генерировать синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (оборотов в минуту). 3600 об / мин соответствует 60 оборотам в секунду.Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин.
Двигатель с более низкой скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об / мин, 12-полюсный двигатель — со скоростью 600 об / мин. Показанный стиль конструкции (рисунок выше) предназначен для иллюстрации. Многополюсные синхронные двигатели со статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.
Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью встречно-штыревыми элементами стальных полюсов, как показано на рисунке выше.Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя — на юге.
Полюса направляют южный поток снизу и снаружи катушки вверх. Эти 6-ю южные части чередуются с 6-ю северными ушками, загнутыми вверх от верхней части стального полюса катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-ти циклам переменного тока за одно физическое вращение стержневого магнита.
Скорость вращения будет 1/6 электрической скорости переменного тока.Скорость ротора будет 1/6 от скорости 2-полюсного синхронного двигателя. Пример: 60 Гц вращает 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на www.clockHistory.com
Статор (рисунок выше) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция аналогична предыдущему рисунку с одной катушкой. Конструкция с одной обмоткой экономична для двигателей с низким крутящим моментом.Этот двигатель со скоростью 600 об / мин приводит в движение редукторы, перемещая стрелки часов.
Q: Если бы двигатель Westclox работал со скоростью 600 об / мин от источника питания 50 Гц, сколько полюсов потребовалось бы?
A: У 10-полюсного двигателя будет 5 пар полюсов N-S. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об / мин (10 с-1 x 60 с / мин).
Перепечатано с разрешения Westclox History на www.clockHistory.com
Ротор (рисунок выше) состоит из стержня постоянного магнита и стальной чашки асинхронного двигателя.Шина синхронного двигателя, вращающаяся внутри полюсных лапок, сохраняет точное время. Чашка асинхронного двигателя за пределами стержневого магнита подходит снаружи и над язычками для самозапуска. Одно время выпускались несамозапускающиеся двигатели без чашки асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, показанный на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются автоматически при запуске от источника питания с фиксированной частотой, например, 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор является не постоянным магнитом для двигателей мощностью несколько лошадиных сил (несколько киловатт), используемых в промышленности, а является электромагнитом. Большие промышленные синхронные двигатели более эффективны, чем асинхронные двигатели. Они используются, когда требуется постоянная скорость. Обладая опережающим коэффициентом мощности, они могут корректировать линию переменного тока на отстающий коэффициент мощности.
Три фазы возбуждения статора складываются векторно, чтобы создать единое результирующее магнитное поле, которое вращается f / 2n раз в секунду, где f — частота линии электропередачи, 50 или 60 Гц для промышленных двигателей, работающих от линии электропередачи.Количество полюсов — n. Для числа оборотов ротора в об / мин умножьте на 60.
S = f120 / n где: S = частота вращения ротора в об / мин f = частота сети переменного тока n = количество полюсов на фазу
Трехфазный 4-полюсный (на фазу) синхронный двигатель будет вращаться со скоростью 1800 об / мин при мощности 60 Гц или 1500 об / мин при мощности 50 Гц. Если катушки запитываются по очереди в последовательности φ-1, φ-2, φ-3, ротор должен по очереди указывать на соответствующие полюса.
Поскольку синусоидальные волны фактически перекрываются, результирующее поле будет вращаться не ступенчато, а плавно.Например, когда синусоидальные волны φ-1 и φ-2 совпадают, поле будет на пике, указывающем между этими полюсами. Показанный ротор стержневого магнита подходит только для небольших двигателей.
Ротор с несколькими полюсами магнита (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с контактным кольцом в крупных промышленных двигателях. Большие промышленные синхронные двигатели запускаются самостоятельно с помощью встроенных в якорь проводов с короткозамкнутым ротором, действующих как асинхронный двигатель.
Электромагнитный якорь возбуждается только после того, как ротор достигает почти синхронной скорости.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели
Малые многофазные синхронные двигатели можно запускать путем линейного увеличения частоты привода от нуля до конечной рабочей частоты. Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами. Можно использовать двух- или трехфазный привод, запитав соответствующее количество обмоток статора. Выше показано только 3 фазы.
Электронный синхронный двигатель
На блок-схеме показана приводная электроника, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока). Эти двигатели имеют датчик положения , встроенный в двигатель, который выдает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как твердотельные датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию коммутации (направление тока якоря) с электроникой привода. Датчик положения может быть датчиком угла с высоким разрешением, таким как резольвер, индуктосин (магнитный энкодер) или оптический энкодер.
Если требуется постоянная и точная скорость вращения, (как для дисковода) могут быть включены тахометр и контур фазовой автоподстройки (рисунок ниже).Этот сигнал тахометра, последовательность импульсов, пропорциональная скорости двигателя, возвращается в контур фазовой автоподстройки частоты, который сравнивает частоту и фазу тахометра со стабильным источником опорной частоты, например кварцевым генератором.
Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, приводимый в действие прямоугольными волнами тока, обеспечиваемый простыми датчиками Холла, известен как бесщеточный двигатель постоянного тока .Этот тип двигателя имеет более высокое отклонение пульсационного момента при обороте вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсации крутящего момента двигателя и механический аналог
Пульсация крутящего момента или зубчатость вызывается магнитным притяжением полюсов ротора к полюсным наконечникам статора. (Рисунок выше) Обратите внимание, что катушки статора отсутствуют.Ротор PM можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними.
Аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы двигатель поочередно ускорялся и замедлялся, когда он перемещает аудиозапись мимо кассетной воспроизводящей головки. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные в ленте, создают более синусоидальное поле
Если двигатель приводится в действие синусоидальными волнами тока, синхронными с обратной ЭДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли формы волны привода электронными средствами.Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , , если магнитное поле статора имеет синусоидальное распределение.
Он будет более синусоидальным, если обмотки полюсов будут распределены в виде ленты через множество пазов, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Такая конструкция подавляет многие нечетные гармоники поля статора.
Слоты с меньшим количеством обмоток на краю обмотки фазы могут делить пространство с другими фазами.Намоточные ремни могут принимать альтернативную концентрическую форму, как показано на рисунке ниже.
Ремни концентрические
Для двухфазного двигателя, который приводится в действие синусоидальной волной, крутящий момент постоянен на протяжении всего оборота по тригонометрической идентичности:
sin2θ + cos2θ = 1
Для генерации и синхронизации формы сигнала привода требуется более точная индикация положения ротора, чем обеспечивается датчиками Холла, используемыми в бесщеточных двигателях постоянного тока.Резольвер , оптический или магнитный кодировщик обеспечивает разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер выдает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.
Привод синусоидальной волны может фактически быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровым сигналом.Каждая фаза требует, чтобы управляющая электроника для этой формы сигнала была сдвинута по фазе на соответствующую величину для каждой фазы.
ШИМ аппроксимирует синусоидальную волну
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются высокоэнергетические постоянные магниты. Появление современной полупроводниковой электроники позволяет управлять этими двигателями с регулируемой скоростью.
Асинхронные двигатели используются в основном в железнодорожной тяге. Однако небольшой синхронный двигатель, который устанавливается внутри ведущего колеса, делает его привлекательным для таких применений. Версия для высокотемпературных сверхпроводников этого двигателя составляет от одной пятой до одной трети веса двигателя с медной обмоткой.
Самый большой экспериментальный сверхпроводящий синхронный двигатель способен управлять кораблем класса военно-морской эсминец. Во всех этих применениях важен электронный привод с регулируемой скоростью.Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Для развития максимального крутящего момента ротор должен отставать от направления поля статора на 90 °. Больше он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, необходимо точно знать положение ротора. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное управление фазой .Он реализован с помощью быстродействующего микропроцессора, управляющего широтно-импульсным модулятором фаз статора. Статор синхронного двигателя такой же, как и у более популярного асинхронного двигателя.
В результате электронное регулирование скорости промышленного уровня, используемое в асинхронных двигателях, также применимо к большим промышленным синхронным двигателям. Если ротор и статор обычного вращающегося синхронного двигателя раскручены, получается синхронный линейный двигатель.
Этот тип двигателя применяется для точного высокоскоростного линейного позиционирования.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности.В наиболее обычном виде эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения. положительный. В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников.Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. Картина токов ротора для текущего момента t 1 рисунка показана на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которые должны быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, передаваемый от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Синхронный двигатель— обзор
Коэффициент мощности для переменного тока
Коэффициент мощности — это коэффициент, на который умножается кажущаяся мощность в кВА для получения фактической мощности, кВт, в системе переменного тока. Это отношение синфазной составляющей линейного тока к общему току [39].
В асинхронных двигателях намагничивающая составляющая тока всегда отстает на 90 °. Следовательно, линейный ток отстает при всех нагрузках; величина зависит от нагрузки тока намагничивания.
В синхронных двигателях возбуждение обеспечивается отдельным источником постоянного тока, либо в виде отдельной мотор-генераторной установки (M-G), либо в виде возбудителя, установленного непосредственно на валу двигателя. Ток можно заставить опережать в разной степени, изменяя величину напряженности поля. Коэффициент мощности двигателей может быть отстающим, единичным или опережающим. При использовании переменного тока потребляемая мощность, называемая активной или фактической мощностью , считается энергией, используемой резистивной нагрузкой [40].Синхронный двигатель обеспечивает единицу или опережающий фактор, а асинхронный двигатель обеспечивает единицу или запаздывающий фактор.
Применяя надлежащую величину возбуждения постоянного тока к полюсам возбуждения синхронного двигателя, он работает с единичным коэффициентом мощности. Синхронные двигатели с коэффициентом мощности Unity предназначены для работы именно таким образом. Полная нагрузка, при возбуждении им не требуется отстающая реактивная кВА от линии, и они не подают опережающую реактивную кВА к линии; они работают с единичным коэффициентом мощности с минимальным током статора и, следовательно, с самым высоким КПД [15].
Проконсультируйтесь с квалифицированным инженером-электриком о типах двигателей, предлагаемых для технологического предприятия; такая оценка сочетания синхронных и асинхронных двигателей поможет определить новый коэффициент мощности для установки, потому что чистый коэффициент запаздывания для станций означает, что вся мощность для этой установки будет стоить больше, чем если бы коэффициент был единицей или опережающим. Из Brown and Cadick [40]:
Полная мощность = EI, или ВА, или кВА
Активная мощность = EICosθ, или Вт, или кВт
Примечание: θ = угол тока между полной и активной мощностью на векторной диаграмме
Реактивная мощность = EISinθ, или VAR, или kVAR
Расчетный коэффициент мощности:
F p = активная мощность / полная мощность
F p = EICosθ / (EI) = cosθ
F p = Вт / (ВАр) = (кВт) / (кВАр)
Обратите внимание, что реактивная мощность предъявляет требования к энергосистеме, но не дает никакой полезной работы.
(20-13) Номинальная мощность двигателяVA = (л.с.) (0,746) (Eff) (powerfactor)
Плата за электроэнергию основана на потребляемой мощности в кВАр; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление. См. Полезные обсуждения этого вопроса в Планкенхорне [41], Валода [42] и Лазаре [43]. Плата за электроэнергию зависит от требований VAR; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление.
На большинстве технологических предприятий необходимо соблюдать осторожность, чтобы поддерживать подходящий коэффициент мощности для своей системы, в противном случае может быть наложен штраф на затраты на электроэнергию.Если коэффициент мощности падает ниже некоторого установленного значения, например 0,8, затраты на электроэнергию увеличиваются, потому что фактическая мощность (в виде тока), необходимая для работы (в лошадиных силах), значительно меньше, чем общая мощность, подаваемая в систему установки. Разница в том, что он попадает в намагничивающее поле (реактивный ток), что не соответствует реальной работе. Добавляя синхронные двигатели или конденсаторы к системе с полностью индукционной нагрузкой, вы можете поднять коэффициент мощности с запаздывающего состояния до единицы (или почти до единицы). Синхронные двигатели могут быть спроектированы так, чтобы обеспечивать переменные величины опережающего коэффициента мощности.Это исследование или баланс, который необходимо учитывать при проектировании станции, а рекомендации должны быть подготовлены компетентными инженерами-электриками.
Обычно коэффициент мощности синхронного двигателя равен единице (1,0) или 0,8. Значения опережения 0,7 или 0,6 дадут большую коррекцию опережения для другой запаздывающей системы.
Рисунок 20-13 иллюстрирует работу с коэффициентом мощности для различных типов оборудования.
Рисунок 20-13. Коэффициент мощности различных устройств и то, как синхронные двигатели улучшают коэффициент мощности.
(Используется с разрешения: EM Synchronizer, 200-SYN-42, © 1955. Dresser-Rand Company.)Асинхронный двигатель обычно требует реактивного намагничивания от 0,3 до 0,6 кВА на л.