Схемы подключения асинхронных электродвигателей
Чтобы привести ротор электродвигателя в движение необходимо правильно подключить концы обмоток статора к трехфазной сети, где рабочее напряжение может быть:
- 220 вольт
- 380 вольт
- 660 вольт
Заказать новый электродвигатель по телефону
Асинхронные электродвигатели АИР предполагают два способа подключения к трехфазной промышленной сети – «треугольник» и «звезда». В основном электродвигатели АИР рассчитаны на 2 номинальных напряжения 220/380 В, либо 380/660 В и имеют два способа подключения к трехфазной промышленной сети: «звезда» и «треугольник»
| 220/380 220 В – «треугольник» 380 В – «звезда» | 380/660 380 В — «треугольник» 660 В — «звезда» |
Как правильно подключить шесть проводов электродвигателя?
Как правило двигатели имеют шесть выводов для возможности выбора схемы подключения: «звезда» либо «треугольник».
Схема подключения «звезда»
При подключении обмоток звездой начала обмоток подключаются к фазам, а концы обмоток собираются общую точку (0 точку).
Таким образом напряжение фазной обмотки составит 220В, а линейное напряжение между обмотками 380В. Основным преимуществом подключения электродвигателя по схеме звезда является:
- Плавный пуск
- Возможность перегрузки (недлительной)
- Повышенная надежность
При этом данная схема подключения обеспечит более низкую мощность от заявленной.
Схема подключения «треугольник»
При подключении треугольником последовательно конец одной обмотки соединяется с началом следующей обмотки.- Максимальная мощность
- Повышенный вращающий момент
- Увеличенные тяговые способности
Однако, электродвигатели подключенные по схеме звезда больше нагреваются.
Комбинированный тип подключения
Как уже было отмечено, подключение «звездой» обеспечивает более плавный пуск, но пр этом не достигается максимальная заявленная мощность электромотора. При подключении «треугольником» достигается полная мощность, но пусковой ток может повредить изоляцию. Поэтому для мощных двигателей (начиная от АИР100L2), часто применяют комбинированную схему подключения трехфазных электродвигателей «звезда-треугольник», когда запуск двигателя происходит по схеме «звезда», в рабочем состоянии он переключается на схему «треугольник». Переключение обеспечивается магнитным пускателем или пакетным переключателем.
Наиболее популярные модели асинхронных электродвигателей:
1. Подключение асинхронного двигателя в однофазную сеть
Применение конденсаторов в асинхронных двигателях
рабочий | пусковой | |
применение | В схемах асинхронных электродвигателей | В схемах асинхронных электродвигателей |
тип подключения | Последовательно со вспомогательной обмоткой электродвигателя | Параллельно рабочему конденсатору |
в качестве | Является фазосмещающим элементом | Является фазосмещающим элементом |
назначение | Позволяет получить круговое вращающееся магнитное поле, необходимое для работы электродвигателя | Позволяет получить магнитное поле, необходимое для повышения пускового момента электродвигателя |
время включения | В процессе работы электродвигателя | В момент пуска электродвигателя |
Существуют две основные области применения конденсаторов для асинхронных электродвигателей.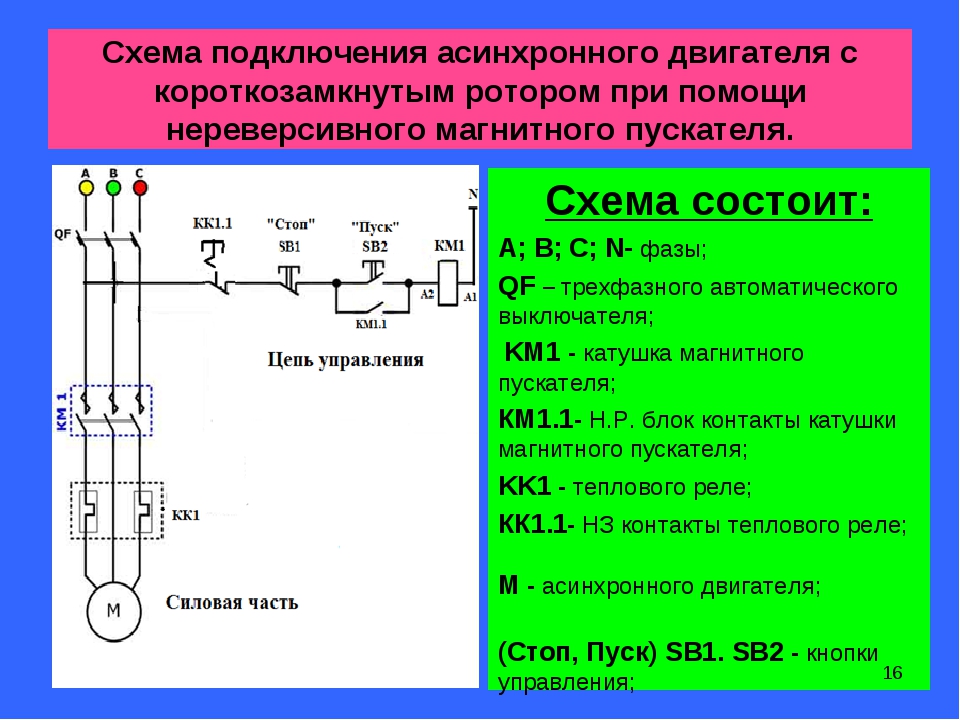
1) Трёхфазный асинхронный электродвигатель, включаемый через конденсатор в однофазную сеть
В случае, когда трехфазный электродвигатель необходимо подключить к однофазной сети, существует два возможных варианта подключения: «звезда» или «треугольник», причем наиболее предпочтительным во многих случаях является вариант «треугольник».
Приблизительный расчет для данного типа соединения производится по следующей формуле:
Сраб.=k*Iф/Uсети
где:
Для схемы соединения «Звезда» — k=2800
Для схемы соединения «Треугольник» — k=4800
Iф – номинальный фазный ток электродвигателя, А.
Uсети – напряжение однофазной сети, В.
Для определения пусковой емкости Сп. исходят из пускового момента. В случае если пуск двигателя происходит без нагрузки, пусковая емкость не требуется.
исходят из пускового момента. В случае если пуск двигателя происходит без нагрузки, пусковая емкость не требуется.
Для получения пускового момента, близкого к номинальному, достаточно иметь пусковую емкость, определяемую соотношением
Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети.
Схема подключения
| Рис 1. Схема включения в однофазную сеть трехфазного асинхронного двигателя с обмотками статора, соединенными по схеме «звезда» (а) или «треугольник» (б):
|

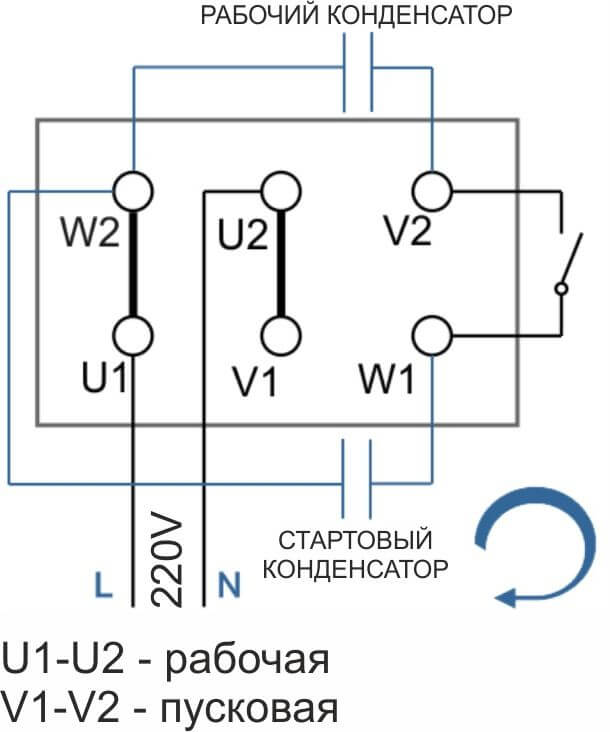
2) Асинхронный электродвигатель, питаемый от однофазной сети и имеющий на статоре две обмотки, одна из которых включается в сеть непосредственно, а другая — последовательно с электрическим конденсатором для образования вращающегося магнитного поля. Конденсаторы создают сдвиг фаз между токами обмоток, оси которых сдвинуты в пространстве. Наибольший вращающий момент развивается, когда сдвиг фаз токов составляет 90°, а их амплитуды подобраны так, что вращающееся поле становится круговым. При пуске конденсаторного асинхронного двигателя оба конденсатора включены, а после его разгона один из конденсаторов отключают. Это обусловлено тем, что при номинальной частоте вращения требуется значительно меньшая емкость, чем при пуске.
Схема подключения
| Рис 2.
|
Конденсаторный асинхронный электродвигатель по пусковым и рабочим характеристикам близок к трехфазному асинхронному двигателю.
Подключение трехфазного асинхронного двигателя
У трёхфазного асинхронного двигателя существует 6 выводов обмотки статора – три начала и три конца. Выводы могут соединяться звездой или треугольником, в зависимости от напряжения питающей сети (380В или 220В). Для этого на корпусе двигателя имеется коробка, в которую выведены начала фаз С1, С2, С3 и концы фаз С4, С5, С6.
Большинство двигателей в настоящее время работают при фазном напряжении 220 В.
Виды соединения обмоток
Соединение звездой – это соединение, при котором концы обмоток имеют одну общую точку (ноль). При таком соединении, линейной напряжение больше чем напряжение в фазе в 1,73 раз. Это значит что если линейное напряжение 380 В, то в фазе будет в 1,73 раза меньше, то есть 220 В. Большой плюс такого соединения в том что пусковые токи невелики в отличие от соединения треугольником. Но при соединении звездой двигатель испытывает значительные потери в мощности.
Соединение треугольником – это соединение, при котором обмотки соединены так, чтобы начало одной обмотки входило в конец другой обмотки. При соединении треугольником фазное напряжение равно линейному, а значит если мы имеем линейное напряжение в сети 220 В, то для правильного подключения двигателя нужно подключать выводы треугольником.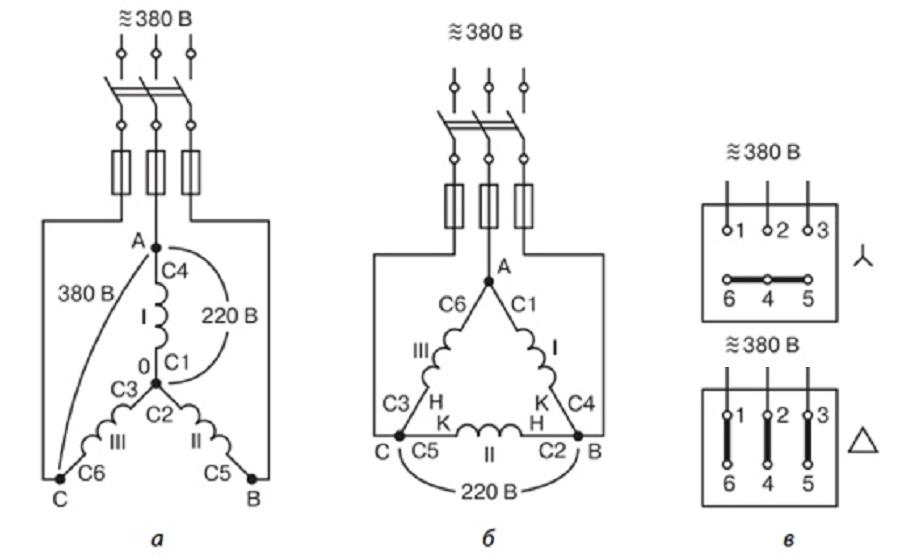 Плюс такого соединения в большой мощности, минус в значительных пусковых токах.
Плюс такого соединения в большой мощности, минус в значительных пусковых токах.
Подключение асинхронного двигателя к однофазной сети
Иногда обстоятельства складываются так, что источником питания является однофазная сеть. Для подключения трехфазного двигателя в этом случае следует воспользоваться конденсатором. Конденсатора может быть два – пусковой и рабочий. Два потому что необходимо в процессе запуска и работы изменять емкость, этого добиваются включением-отключением одного из конденсаторов (пускового). Обычно используют бумажные конденсаторы, потому что они неполярные, а в цепи переменного тока это важно учитывать.
Емкость рабочего конденсатора можно рассчитать по формуле:
Емкость пускового конденсатора нужно выбирать в 2-2,5 раза больше емкости рабочего конденсатора, а его рабочее напряжение должно быть выше питающего в 1,5 раза.
В момент подачи напряжения ключ SA замыкают, а затем размыкают, тем самым кратковременно увеличивая ток необходимый для запуска двигателя.
Нужно учитывать, что далеко не все двигатели можно подключать к однофазной цепи. Также нужно знать, что максимальная мощность при таком подключении составит не более 50-60% от мощности при подключении к трехфазной цепи.
Подключение электродвигателя по схеме звезда и треугольник
Схемы подключения электродвигателя. Звезда, треугольник, звезда — треугольник.
Асинхронные двигатели, имея ряд таких неоспоримых достоинств, как надежность в эксплуатации, высокая производительность, способность выдерживать большие механические перегрузки, неприхотливость и невысокая стоимость обслуживания и ремонта, обусловленные простотой конструкции, имеют, конечно и свои определенные недостатки.
На практике применяются основные способы подключения к сети трёхфазных электродвигателей: «подключение звездой» и «подключение треугольником».
При соединении трёхфазного электродвигателя звездой, концы его статорных обмоток соединяются вместе, соединение происходят в одной точке, а на начала обмоток подаётся трехфазное напряжение (рис 1).
При соединении трёхфазного электродвигателя по схеме подключения «треугольником» обмотки статора электродвигателя соединяются последовательно таким образом что конец одной обмотки соединяется началом следующей и так далее (рис 2).
Не вдаваясь в технические и теоретические основы электротехники известно, что электродвигатели у которого обмотки, соединенные звездой работают плавнее и мягче, чем электродвигатели с соединенными обмотками треугольником, необходимо отметить, что при соединении обмоток звездой электродвигатель не может развить полную мощность. При соединении обмоток по схеме треугольник электродвигатель работает на полную паспортную мощность (что составляет в 1,5 раз больше по мощности, чем при соединении звездой), но при этом имеет очень большие значения пусковых токов.
В связи с этим для снижения пусковых токов целесообразно (особенно для электродвигателей с большей мощностью) подключение по схеме звезда — треугольник; первоначально запуск осуществляется по схеме «звезда», после этого (когда электродвигатель «набрал обороты»), происходит автоматическое переключение по схеме «треугольник».
Схема управления :
Еще вариант схемы управления двигателем
Подключение напряжения питания через контакт NC (нормально закрытый) реле времени К1 и контакт NC К2, в цепи катушки пускателя К3.
После включения пускателя К3, своими нормально-замкнутыми контактами размыкает цепи катушки пускателя К2 контактами К3 (блокировка случайного включения) и замыкает контакт К3, в цепи питания катушки магнитного пускателя К1, который совмещен с контактами реле времени.
При включении пускателя К1 происходит замыкание контактов К1 в цепи катушки магнитного пускателя К1 и одновременно включается реле времени, размыкается контакт реле времени К1 в цепи катушки пускателя К3, замыкает контакт реле времени К1 в цепи катушки пускателя К2.
Отключение обмотки пускателя К3, замыкается контакт К3 в цепи катушки магнитного пускателя К2. После включение пускателя К2, размыкает своими контактами К2 в цепи катушки питания пускателя К3.
(Начало обмоток статора: U1; V1; W1. Концы обмоток: U2; V2; W2. На клеммной доске шпильки начала и концов обмоток расположены в строгой последовательности: W2; U2; V2; под ними расположены: U1; V1; W1. При подключении двигателя в «треугольник» шпильки соединяются перемычками: W2-U1; U2-V1; V2-W1.)
Концы обмоток: U2; V2; W2. На клеммной доске шпильки начала и концов обмоток расположены в строгой последовательности: W2; U2; V2; под ними расположены: U1; V1; W1. При подключении двигателя в «треугольник» шпильки соединяются перемычками: W2-U1; U2-V1; V2-W1.)
На начала обмоток U1, V1 и W1 через силовые контакты магнитного пускателя К1 подаётся трехфазное напряжение. При срабатывании магнитного пускателя К3 с помощью его контактов К3, происходит замыкание, соединяя концы обмоток U2, V2 и W2 между собой обмотки двигателя соединены звездой.
Через некоторое время срабатывает реле времени, совмещённое с пускателем К1, отключая пускатель К3 и одновременно включая К2, замыкаются силовые контакты К2 и происходит подача напряжение на концы обмоток электродвигателя U2, V2 и W2. Таким образом электродвигатель включается по схеме треугольник.
Для запуска двигателей по схеме звезда-треугольник разными производителями выпускаются так называемые пусковые реле, название они могут иметь разные «Пусковые реле времени» , реле «старт-дельта» и др. , но назначение у них одно и тоже:
, но назначение у них одно и тоже:
РВП-3, ВЛ-32М1, D6DS (Австрия) , ВЛ-163 (Украина), CRM-2T (Чехия), TRS2D (Чехия), 1SVR630210R3300 (ABB), 80 series (Finder) и другие.
Типовая схема с пусковым реле времени (реле «звезда/треугольник») для управления запуском трехфазного асинхронного двигателя:
Вывод: Для снижения пусковых токов запускать двигатель необходимо в следующей последовательности: сначала включенным по схеме «звезда» на пониженных оборотах, далее переключаться на «треугольник».
Запуск сначала треугольником создает максимальный момент, а уже переключение на звезду (пусковой момент в 2 раза меньше) с дальнейшей работой в номинальном режиме, когда электродвигатель «набрал обороты», происходит автоматическое переключение на схему треугольник, стоит учитывать какая нагрузка на валу перед запуском, ведь вращающий момент при звезде ослаблен, поэтому такой способ запуска вряд ли подойдет для очень загруженных двигателей, может выйти из строя.
Схемы подключения многоскоростного трехфазного электродвигателя
Схема присоединения многоскоростного асинхронного электродвигателя с короткозамкнутым ротором
Схема присоединения многоскоростного асинхронного электродвигателя с короткозамкнутым ротором
Треугольник(или звезда)\\ двойная звезда —— Д/YY.
Низшая скорость — Д(треугольник(или звезда Y ): 750 об/мин
2U, 2V, 2W свободны, на 1U, 1V, 1W подается напряжение.
Высшая скорость — YY. 1500 об мин.
1U, 1V, 1W замкнуты между собой, на 2U, 2V, 2W подается напряжение
Двухскоростные двигатели имеют одну полюсопереключаемую обмотку с шестью выводными концами. Обмотка двигателей с соотношением частот вращения 1 : 2 выполняется по схеме Даландера и соединяется в треугольник Д (или в звезду Y) при низшей частоте вращения и в двойную звезду (YY) при высшей частоте вращения Схема соединения обмоток показана на рисунке.
Средняя скорость. 1000 об мин.
Обмотка на 1000 об мин подключается независимо от остальных своим пускателем, не участвующим в схеме Даландера.
Запуск двухскоростного двигателя с переключающимися полюсами без инверсии вращения для схемы Даландера.
Электрические характеристики элементов контроля и защиты необходимые для выполнения этого типа запуска, как минимум должны быть:
Контактор К1, для включения и выключения двигателя на маленькой скорости (PV). Мощность должна быть такой же либо превышать In двигателя в треугольном соединении и с категорией обслуживания АС3.
Контакторы К2 и К3, для включения и выключения двигателя на большой скорости (GV). Мощность этих контакторов должна быть такой же либо превышать In двигателя соединенного двойной звездой и категориеи обслуживания АС3.
Термореле F3 и F4, для защиты от перегрузок на обоих скоростях. Каждый из них будет измерять In, употребляемый двигателем на защищаемой скорости.
Предохранители F1 и F2, для защиты от К.З. должно быть типа аМ и мощностью такой же или превышающей максимальное In двигателя, в каждой из своих двух скоростей.
Предохранитель F5, для защиты цепей контроля.
Система кнопок, с простым прерывателем остановки S0 и двумя двойными прерывателями движения S1 и S2.
Перейдем к описанию в краткой форме процесса запуска, как на малой скорости, так и на большой:
а) запуск и остановка на маленькой скорости (PV).
Запуск путем нажатия на S1.
Замыкание контактора цепи К1 и запуск двигателя соединенного треугольником.
Автопитание через (К1, 13–14).
Открытие К1, которое действует как шторка для того, чтобы хотя запущен в движение S2, контакторы большой скорости К2 и К3 не были активизированы.
Остановка путем нажатия на S0.
б) запуск и остановка на большой скорости (GV).
Запуск путем нажатия на S2.
Замыкание контактора звезды К2, которое формирует звезду двигателя при коротком замыкании: U1, V1 и W1.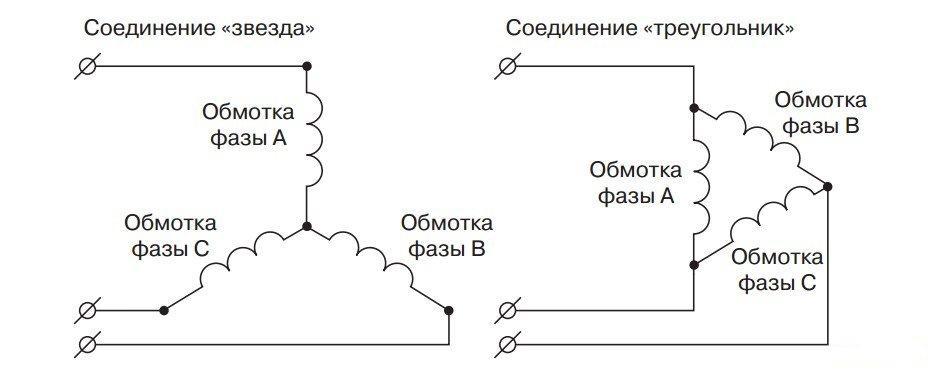
Замыкание контактора К3 (К2, 21–22) таким образом, что двигатель работает соединением в двойную звезду.
Автопитание через (К2, 13–14).
Открытие (К2, 21–22) и (К3, 21–22), которые действуют как шторки для того, чтобы никогда не закрывался К1 в то время, как закрыты К2 или К3.
Остановка путем нажатия на S0.
Вспомогательные контакты системы кнопок (S1 и S2, 21–22)действуют как защитные двойные шторки системы кнопок в том случае, если на оба прерывателя попытаются нажать одновременно, чтобы никакой из контакторов не активизировался и эти контакты можно было бы убрать в том случае, если есть защитные шторки механического типа между К1 и К2.
Как подключить электродвигатель, схема подключения
Трехфазные электродвигатели — имеют более высокую эффективностью, чем однофазные электродвигатели на 220 вольт. Поэтому подключение электродвигателя на 380 вольт обеспечивает более стабильную и экономичную работу устройства.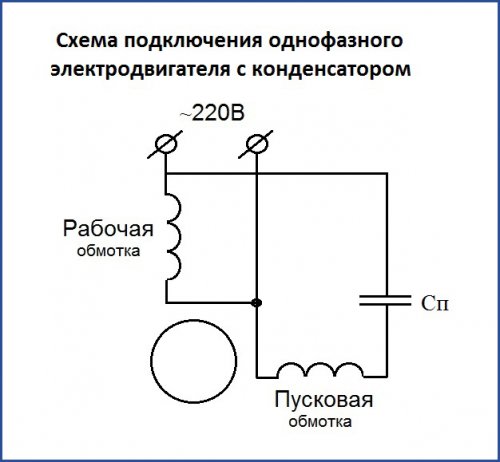 Для запуска электродвигателя не понадобятся конденсаторы или другие пусковые устройства и обмотки, потому что вращающееся магнитное поле возникает в статоре сразу после подключения к электросети 380 Вольт.
Для запуска электродвигателя не понадобятся конденсаторы или другие пусковые устройства и обмотки, потому что вращающееся магнитное поле возникает в статоре сразу после подключения к электросети 380 Вольт.
На шильде электродвигателя должно быть видно, что обмотки электродвигателя можно соединить, как треугольником на 220 Вольт, так звездой на 380 Вольт.
В клеммной коробке электродвигателя вы увидите шесть выводов — U1, U2, V1,V2, W1, W2. Это означает что электродвигатель можно подключить на 220 или 380 Вольт.
Схема подключения трехфазного электродвигателя:
Подключение звездой — большинство промышленных трехфазных электродвигателей подключается по схеме — «звезда» 380В.
При подключении звездой вам нужно подключить 3 фазы на разъемы А, В, С.
При подключении треугольником на 220В — необходимо сделать три разные последовательные соединения. После чего можно подключать к 3 независимым последовательным соединениям 3 фазы на разъемы А, В и С как не рисунке.
Подключение звезда-треугольник — В очень редких случаях для получения большей отдачи по мощности, электродвигатель подключают «звезда-треугольник»
Внимание:
Указанная мощность на бирке электродвигателя, это не электрическая, а механическая мощность на валу.
Хочу заметить, что при подключении электродвигателя по схеме «звезда» запуск будет достаточно плавным, но при этом сложно будет достичь максимальной мощности работы трехфазного асинхронного электродвигателя. Поэтому для достижения максимальных показателей электродвигатель подключают «треугольником» и тогда он выдаст полную заявленную мощность, а это в 1,5 раза больше чем при подключении звездой. Но нужно знать что при запуске «треугольником» ток настолько высокий, что может повредить изоляцию проводки и сократить срок службы электродвигателя. Именно поэтому для мощных электродвигателей применяют комбинированную схему подключения по принципу «звезда-треугольник». Сначала запуск мотора происходит по схеме «звезда», но когда электродвигатель набирает достаточную мощность происходит ручное или автоматическое (через реле) переключение на схему «треугольник». После чего мощность возрастает в несколько раз.
После чего мощность возрастает в несколько раз.
Подключение трехфазного электродвигателя, видео:
Подключение электродвигателя звездой и треугольником
О достоинствах асинхронных двигателей спорить не приходится. Специалисты, в частности, выделяют:
- высокую производительность;
- надежность;
- неприхотливость;
- простоту конструкции;
- умеренную стоимость ремонта и обслуживания и т.п.
Асинхронный двигатель состоит из двух основных элементов: статора и ротора. Они имеют токопроводящие обмотки, начала и концы которых выводятся в распределительную коробку и фиксируются в два ряда. Они обозначаются либо литерами С (С1, С2, С3 – начала обмоток, С4, С5, С6 – их концы), либо согласно новой маркировке: U1, V1, W1 –начала, U2, V2, W2 – концы.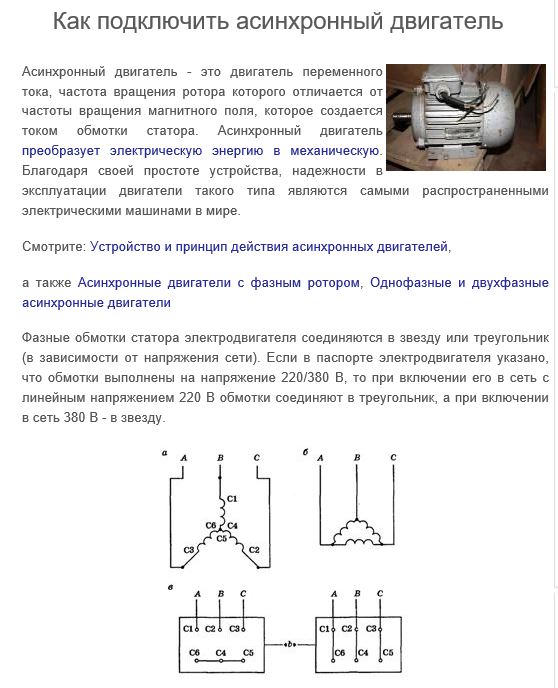
Очень часто у людей, впервые имеющих дело с двигателями подобного типа, возникает вопрос: как же их лучше подключить? Существует три схемы подключения:
- «треугольник»;
- «звезда»;
- комбинированная («звезда-треугольник»).
Итак, каким образом осуществляется подключение электродвигателя звездой и треугольником?
Подключение звездой
В этом случае концы обмоток статора соединяются вместе в одной точке с помощью специальной перемычки. Трехфазное напряжение подается на их начала. Таким образом, на фазной обмотке напряжение будет 220в, а линейное напряжение между двумя оставшимися фазными обмотками – 380в.
Подключение трехфазных двигателей с питающим напряжением 220/127в к стандартным однофазным сетям выполняется только по типу звезды, в противном случае агрегат быстро придет в негодность. Также именно по данной схеме подключаются все электромоторы российского производства на 380в.
В целом подключение звездой обеспечивает более мягкий запуск двигателя и плавность его работы, давая также возможность перезагрузки. Поэтому двигатели средней мощности принято запускать по данной схеме. Однако следует учесть, что в этом случае трехфазный двигатель не сможет работать на полную мощность.
Поэтому двигатели средней мощности принято запускать по данной схеме. Однако следует учесть, что в этом случае трехфазный двигатель не сможет работать на полную мощность.
Подключение треугольником
Обмотки соединяются последовательно в замкнутую ячейку, т.е. конец одной из них соединяется с началом следующей и т.д. Ряды контактов с клеммами располагаются так, чтобы они были смещены относительно друг друга (т.е. напротив вывода С6 (W2)помещается С1 (U1) и т.п.). Места соединения следует подключить к соответствующим фазам питающего напряжения. Линейное напряжение сети и напряжение на фазной обмотке равны 220в
Соединение треугольник гарантирует достижение максимальной мощности асинхронного электродвигателя (т.е. полной паспортной мощности, что в полтора раза больше, чем при соединении звездой), но при этом он подвержен большему нагреву и имеет большие значения пусковых токов. Это обусловлено конструктивными особенностями двигателей данного типа: ротор достаточно массивен и имеет большую инерционность, следовательно, когда он раскручивается, мотор работает в режиме перегрузки. Соответственно, двигатель может быстро выйти из строя. Однако если вам нужно подключить к электросети электромотор, произведенный в Европе и рассчитанный на номинальное напряжение 400/690, то это единственно правильный вариант.
Соответственно, двигатель может быстро выйти из строя. Однако если вам нужно подключить к электросети электромотор, произведенный в Европе и рассчитанный на номинальное напряжение 400/690, то это единственно правильный вариант.
Комбинированное подключение
Эту функцию используют только для двигателей с соответствующей пометкой (Δ/Y), которая обозначает, что возможны оба варианта соединения. Запуск осуществляется при подключении звездой для уменьшения пускового тока, затем после набора номинальной частоты вращения переключение на треугольник происходит в автоматическом режиме. Таким образом мы получаем максимально возможную мощность на выходе.
Использование данного способа связано со скачками токов. При переключении между схемами происходит следующее: прекращается подача тока, снижается скорость вращения ротора (иногда достаточно резко), затем восстанавливается изначальная скорость вращения.
Пусковые реле
Для того чтобы запустить электродвигатель согласно схеме «звезда-треугольник», разработано специальное оборудование. Названия могут быть разными: реле «Старт-дельта», «Пусковые реле времени» и т.п., но схема их действия всегда одинакова: после подачи напряжения на реле начинается отсчет времени разгона, включается пускатель «звезда», затем, по окончании времени разгона контакты размыкаются, пускатель выключается, замыкаются контакты, включающие пускатель «треугольник».
Названия могут быть разными: реле «Старт-дельта», «Пусковые реле времени» и т.п., но схема их действия всегда одинакова: после подачи напряжения на реле начинается отсчет времени разгона, включается пускатель «звезда», затем, по окончании времени разгона контакты размыкаются, пускатель выключается, замыкаются контакты, включающие пускатель «треугольник».
Подобные реле производятся в Чехии (CRM-2T, TRS2D), Австрии (РВП-3, D6DS, ВЛ-32М1), Украине (ВЛ-163), Италии (80 series, Finder). Он могут быть модульными, программируемыми, съемными, одно- или многофункциональными, механическими или цифровыми, суточными, недельными – выбор достаточно широк.
Итак, вопрос: как подключить электродвигатель звездой или треугольником — решается достаточно просто. Внимательно изучите инструкцию, прилагаемую к агрегату, обращая особое внимание на метки на бирке мотора.
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей.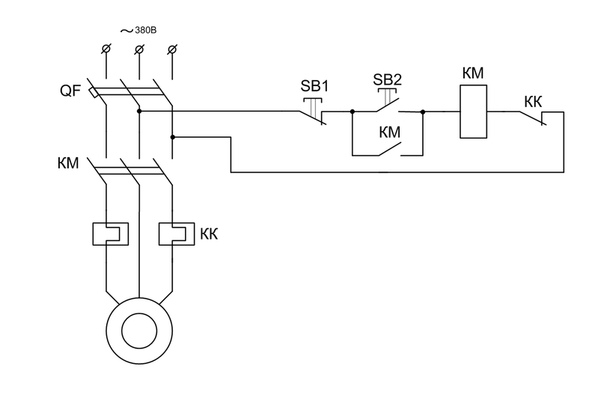 К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), названный беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из пакетов листов электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Твердый сердечник ротора состоит из пакетов листов электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, в которых роторы состоят из обмоток, а не из короткозамкнутого ротора. Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться.Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом становясь электрически таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора.Поток тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Подача напряжения на статор вызывает прохождение тока в обмотках статора.Поток тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит в основном от нагрузки двигателя, но также зависит от сопротивления цепи ротора и силы поля, создаваемого магнитным потоком статора.
Это зависит в основном от нагрузки двигателя, но также зависит от сопротивления цепи ротора и силы поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные отношения.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение, s, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, задается уравнением трансформатора
E = 4,44 f N № м
, где Н, = количество проводников под одним полюсом статора (обычно мало для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу.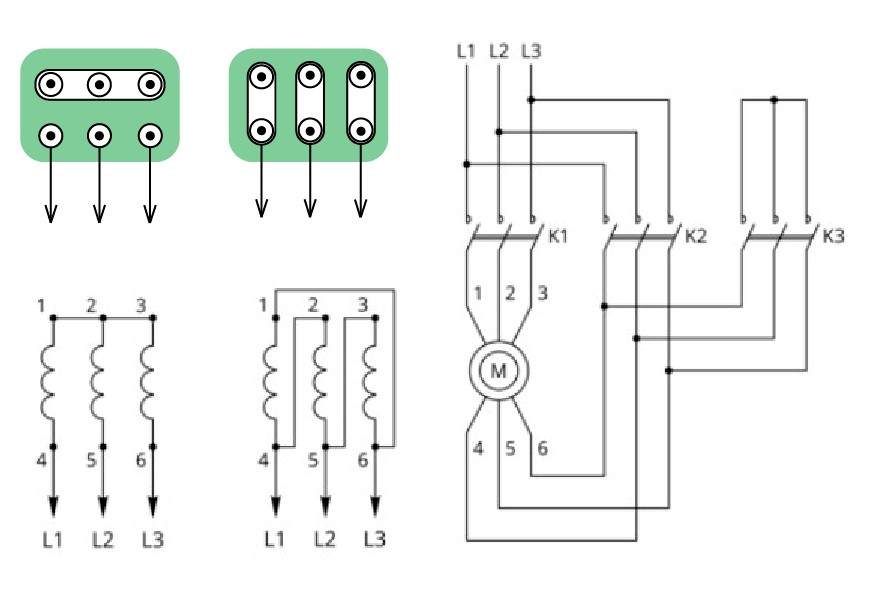 Таким образом, индуцируемое при вращении ротора напряжение E r зависит от скольжения:
Таким образом, индуцируемое при вращении ротора напряжение E r зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателейСинхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Есть два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем с переключаемым сопротивлением, содержит ротор, отлитый из стали, который включает выемки или зубцы, называемые выступающими полюсами. Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются заметными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением мощности на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора расположен под некоторым углом к зубу статора, по крайней мере, часть магнитного потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора расположен под некоторым углом к зубу статора, по крайней мере, часть магнитного потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Другой тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их участки слабо проницаемы из-за прорезанных в них щелей.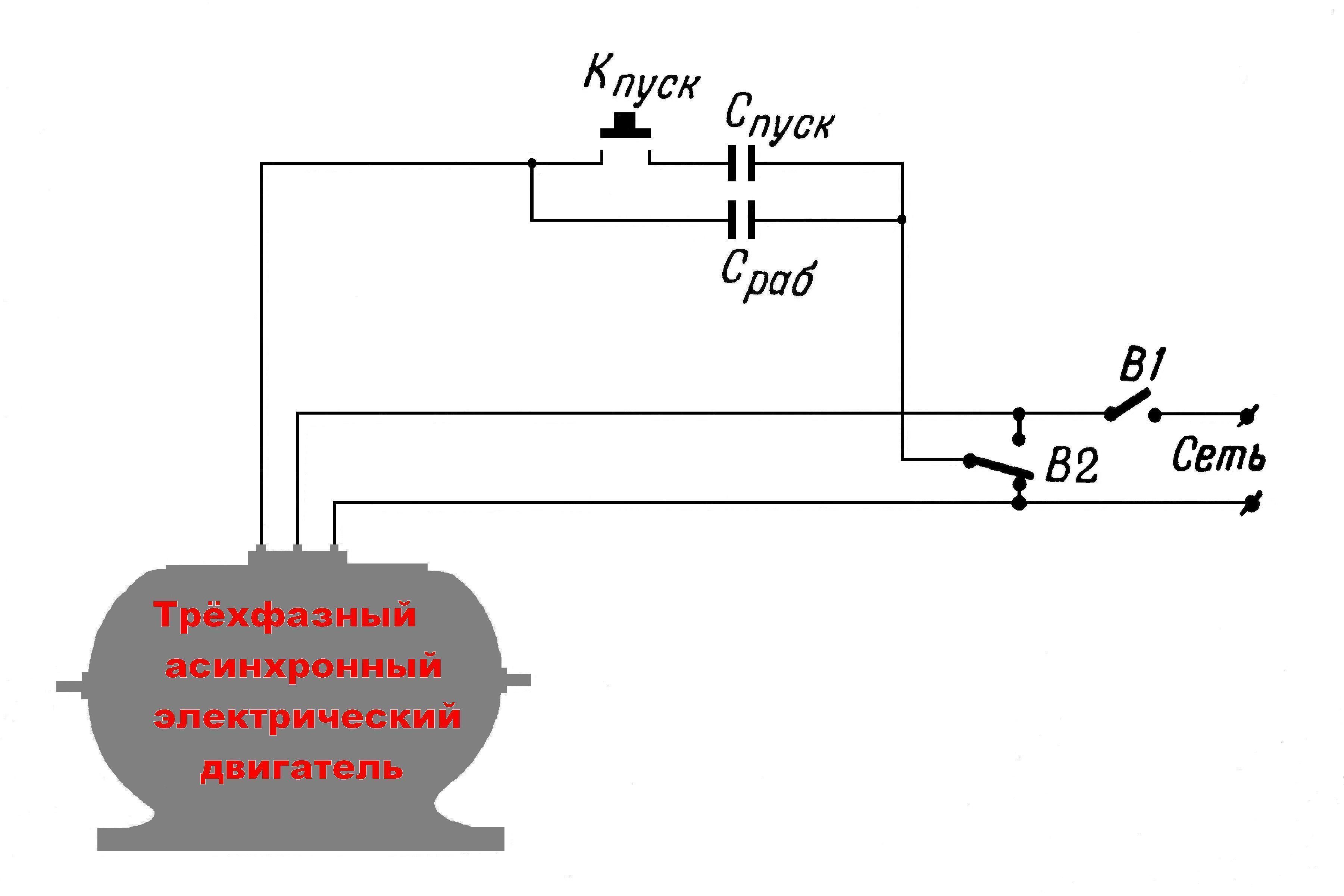 Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых используются роторы, несущие проводники.Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Скорость двигателя не зависит от крутящего момента. Это не похоже на асинхронные двигатели переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения частоты вращения двигателя.
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора.Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для передачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле по-прежнему меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько более низкой скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из пакетов листовой электротехнической стали.
Также можно найти асинхронные двигатели, в которых роторы состоят из обмоток, а не из короткозамкнутого ротора. Они называются асинхронными двигателями с фазным ротором. Смысл конструкции в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться.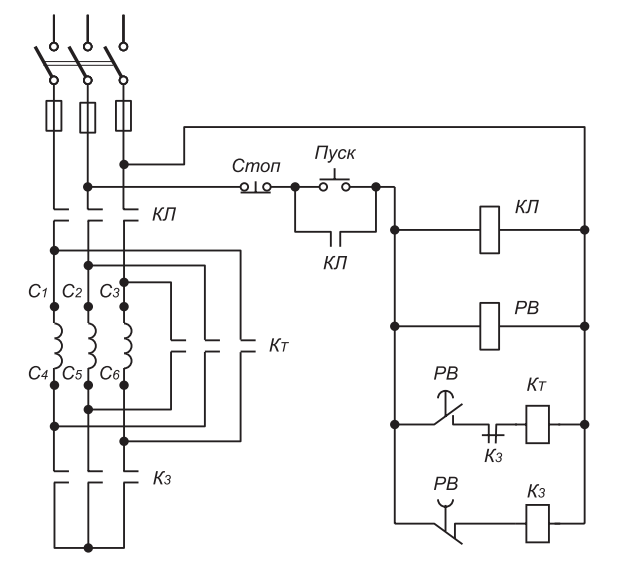 Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом становясь электрически таким же, как ротор с короткозамкнутым ротором.
Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом становясь электрически таким же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Поток тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.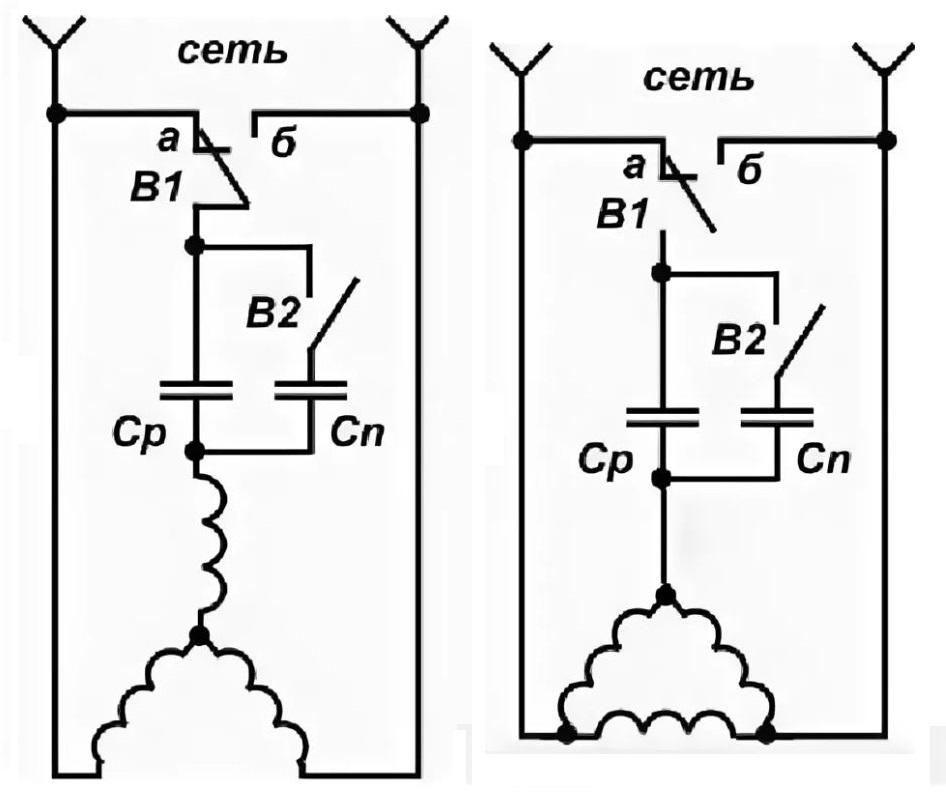 Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора.Эта задержка заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит в основном от нагрузки двигателя, но также зависит от сопротивления цепи ротора и силы поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору сначала подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf. Здесь s выражается в виде десятичной дроби.
Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к источнику переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Обороты ротора двигателя, то есть синхронная скорость N, составляет:
N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.

- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.

Синхронные двигатели переменного тока малой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и дороже трехфазных асинхронных двигателей, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Их обычно классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машиной. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением от постоянного тока.
Синхронные двигатели без возбуждения имеют стальные роторы. В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраиваются специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраиваются специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Двигатель с гистерезисом использует широкую петлю гистерезиса в роторе из кобальтовой стали с высокой коэрцитивной силой.Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются для обеспечения непрерывного вращения. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. От этих двигателей питаются новейшие лифты, и коробка передач не требуется.
Пример двигателя с постоянным магнитом с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.
Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением можно называть разными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор. Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужный момент вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужный момент вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их участки слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых используются роторы, несущие проводники.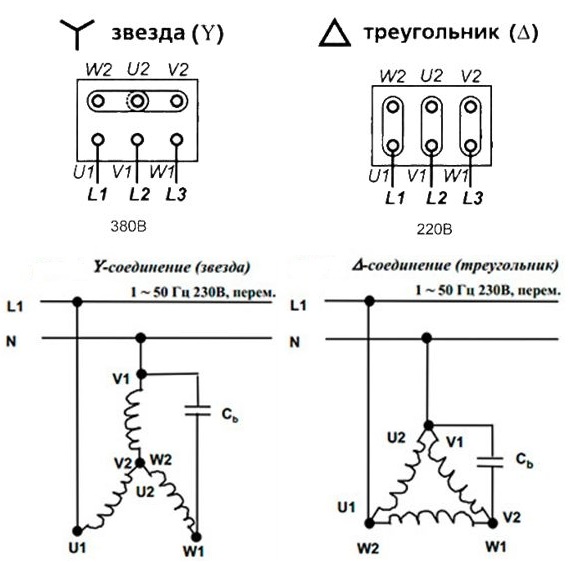
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Скорость двигателя не зависит от крутящего момента. Это не похоже на асинхронные двигатели переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Асинхронный двигатель| Асинхронный двигатель
Самым распространенным двигателем в мире является асинхронный двигатель.![]() Это двигатель, который может работать без электрического подключения к ротору. В этом посте речь пойдет об асинхронных двигателях (асинхронных двигателях), это типы i.е. однофазный, трехфазный, беличий корпус, контактное кольцо и т. д., особенности, как это работает, применения, преимущества и недостатки.
Это двигатель, который может работать без электрического подключения к ротору. В этом посте речь пойдет об асинхронных двигателях (асинхронных двигателях), это типы i.е. однофазный, трехфазный, беличий корпус, контактное кольцо и т. д., особенности, как это работает, применения, преимущества и недостатки.
Асинхронный двигатель или асинхронный двигатель — это самый основной и распространенный тип электродвигателя, который имеет только обмотку Armortisseur , что означает вспомогательную обмотку только на якоре. В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя.Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис.1 — Введение в асинхронный двигатель (асинхронный двигатель)
Он упоминается как «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость. Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение магнитным полем в статоре, между токами в статоре и роторе есть задержка. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Рис.2 — Детали асинхронного двигателя (асинхронный двигатель)
Конструкция асинхронного двигателя (асинхронного двигателя)
Он состоит в основном из двух частей, а именно:
Статор
Это неподвижная часть электродвигателя.Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Ротор
Это вращающаяся часть двигателя. Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) — это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника расположены параллельные прорези, через которые проходит ток.Сердечник имеет стержень из алюминия, меди или сплава.
Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) — это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника расположены параллельные прорези, через которые проходит ток.Сердечник имеет стержень из алюминия, меди или сплава.
Рис.3 — Базовый ротор и статор
Типы асинхронных двигателей (асинхронные двигатели)Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не является двигателем с автоматическим запуском. Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке.Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля — это два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен быть перемещен в любом направлении извне, чтобы двигатель заработал. Однофазный индуктор отсюда; могут иметь разные разновидности в зависимости от устройства, с которого запускается двигатель, и это:
- Двигатель с расщепленной фазой
- Двигатель с экранированными полюсами
- Конденсаторный пусковой двигатель
- Конденсаторный пусковой двигатель и конденсаторный двигатель
Фиг.4 — Принципиальная схема (а) однофазного (б) трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель (асинхронный двигатель)
Это двигатели, для запуска которых не требуется никаких внешних устройств, таких как конденсатор, центробежный переключатель или пусковая обмотка.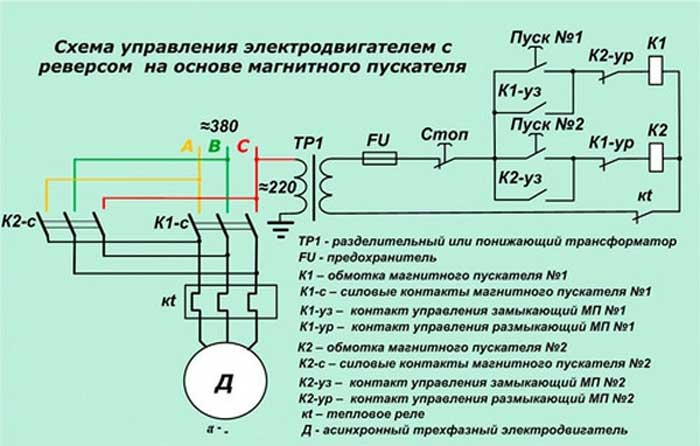 Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что это три фазы: phase1, phase2 и phase3. Итак, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого возбуждается фаза 2, и тогда ротор притягивается к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор продолжит вращаться.
Далее они подразделяются на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
Ротор этого типа имеет форму беличьей клетки, отсюда и название. Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость этого типа асинхронного двигателя очень легко изменить, просто изменив форму стержней в роторе.
Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на поверхности. Скорость этого типа асинхронного двигателя очень легко изменить, просто изменив форму стержней в роторе.
Рис.5 — Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Он также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключен к внешнему сопротивлению через контактные кольца.Скорость вращения ротора регулируется путем регулировки внешнего сопротивления. Поскольку этот двигатель имеет больше обмоток, чем асинхронный двигатель с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис.6 — Асинхронный двигатель с контактным кольцом
Характеристики асинхронного двигателя (асинхронного двигателя) Ниже приведены характеристики двух различных типов асинхронных двигателей.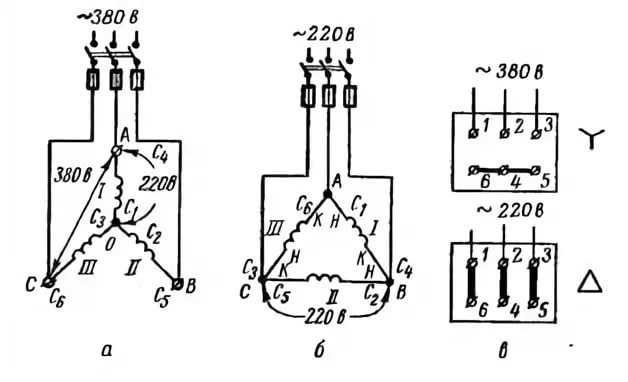
- Здесь мы выделим некоторые характеристики, которые применимы только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не запускаются автоматически и используют однофазное питание для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, в котором необходимо изменить вращение. .
- Для запуска двигателя вам потребуется конденсатор и / или центробежный переключатель.
- У этих двигателей низкий пусковой крутящий момент.
- Они в основном используются дома или в бытовых приборах из-за низкого коэффициента мощности и эффективности.
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, которые отличает его от однофазного двигателя:
- Это автономные двигатели, не требующие специальных пускателей.
- Имеются три однофазных линии с разностью фаз 120 градусов.
- Он имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой момент у этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Явление, которое заставляет работать асинхронные двигатели или асинхронные двигатели, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте предпримем ряд шагов, которые происходят при вращении этого двигателя:
- На обмотки статора подается питание, протекает ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка закорачивается.
- Короткозамкнутая обмотка ротора обрезается магнитным потоком статора.

Рис.7 — Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущую силу). Итак, согласно этому закону, в катушках ротора начинает течь ток.
- Ток в роторе генерирует другой поток.
- Теперь есть два потока: один в статоре, а другой в роторе.
- Поток ротора отстает от магнитного потока статора, что создает крутящий момент в роторе в направлении магнитного поля.
В числе приложений:
- Они широко используются в миксерах, игрушках, вентиляторах и т. Д.
- Они также используются в насосах и компрессорах.
- Малые асинхронные двигатели используются в электробритвах.
- Они используются в буровых машинах, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных фабрик и маслоэкстракционных заводов.

Ниже приведены некоторые преимущества асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, поскольку у них не так много деталей, как коммутаторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь о том, что они износятся, поскольку у них нет щеток.
- Они просты в эксплуатации, поскольку к ротору не подключены электрические разъемы.
- Поскольку у них нет щеток, искры не боятся, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Скорость от малой нагрузки до номинальной меняется меньше.

Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, перечисленных ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, где требуется точный контроль скорости.
- Падение КПД при низких нагрузках.
- Они имеют высокие входные импульсные токи, что дает низкое напряжение при запуске двигателя.
См. Также: Видео на YouTube об асинхронных двигателях
Также читают: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор - работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое клещи (клещи-тестеры) - типы, принцип работы и порядок эксплуатации
Лакшми — B. E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
асинхронные двигатели переменного тока | Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните этоРеклама
Криса Вудфорда. Последнее изменение: 21 апреля 2020 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как
базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из
двигатели, которые мы используем каждый день — от заводских машин до
электропоезда — вообще-то так не работают.Какие книги
рассказывают нам о простых двигателях постоянного тока (DC), которые имеют
петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни,
в большинстве двигателей большой мощности используется переменный ток (AC) и
работают совершенно по-другому: это то, что мы называем индукцией
двигатели, и они очень изобретательно используют вращающееся магнитное поле.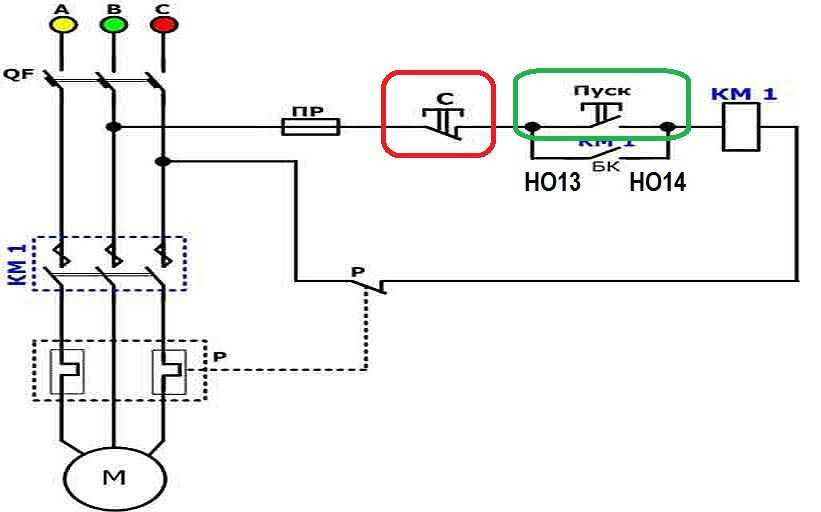 Рассмотрим подробнее!
Рассмотрим подробнее!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, показывая медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Изображение: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют электрический ток каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном направлении.
Простые двигатели, которые вы видите в научных книгах, основаны на
кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между
полюса магнита.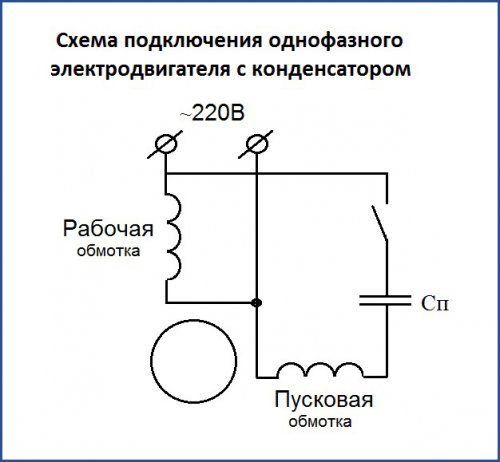 (Физики назвали бы это
проводник с током сидит в магнитном поле.)
вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле
отталкивает исходное поле от постоянного магнита, в результате чего провод
перевернуть.Обычно провод останавливался в этой точке, а затем снова переворачивался,
но если мы используем оригинальное вращающееся соединение
называется коммутатором, мы можем сделать обратный ток каждый раз, когда
проволока переворачивается, и это означает, что проволока будет продолжать вращаться в
в том же направлении до тех пор, пока течет ток. Это
сущность простого электродвигателя постоянного тока, задуманного в
1820-е годы Майкла Фарадея и
превратился в практическое изобретение о
десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
(Физики назвали бы это
проводник с током сидит в магнитном поле.)
вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле
отталкивает исходное поле от постоянного магнита, в результате чего провод
перевернуть.Обычно провод останавливался в этой точке, а затем снова переворачивался,
но если мы используем оригинальное вращающееся соединение
называется коммутатором, мы можем сделать обратный ток каждый раз, когда
проволока переворачивается, и это означает, что проволока будет продолжать вращаться в
в том же направлении до тех пор, пока течет ток. Это
сущность простого электродвигателя постоянного тока, задуманного в
1820-е годы Майкла Фарадея и
превратился в практическое изобретение о
десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Прежде чем перейти к двигателям переменного тока, давайте быстро
резюмируйте, что здесь происходит.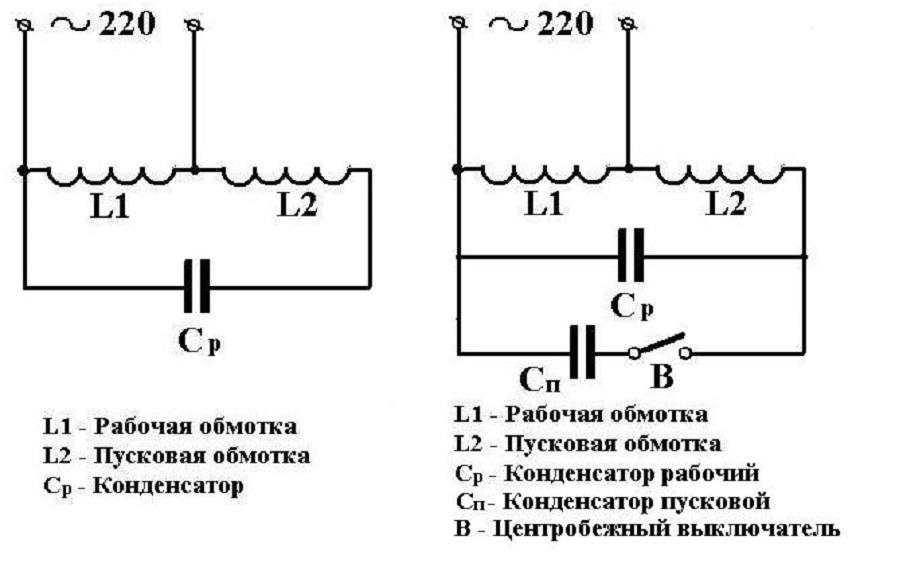 В двигателе постоянного тока магнит (и его
магнитное поле) фиксируется на месте и образует внешнюю статическую часть
двигатель (статор), а катушка с проводом, несущая электрический
ток формирует вращающуюся часть двигателя
(ротор). Магнитное поле исходит от статора, который
постоянного магнита, пока вы подаете электроэнергию на катушку, которая
составляет ротор. Взаимодействие между постоянными магнитами
поле статора и временное магнитное поле, создаваемое ротором, равно
что заставляет мотор крутиться.
В двигателе постоянного тока магнит (и его
магнитное поле) фиксируется на месте и образует внешнюю статическую часть
двигатель (статор), а катушка с проводом, несущая электрический
ток формирует вращающуюся часть двигателя
(ротор). Магнитное поле исходит от статора, который
постоянного магнита, пока вы подаете электроэнергию на катушку, которая
составляет ротор. Взаимодействие между постоянными магнитами
поле статора и временное магнитное поле, создаваемое ротором, равно
что заставляет мотор крутиться.
Как работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока вам нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов
расположены снаружи (составляя статор),
которые предназначены для создания вращающегося магнитного поля. Внутри статора находится цельная металлическая ось, проволочная петля,
катушка, беличья клетка из металлических стержней и межсоединений
(например, вращающиеся клетки, которым иногда удается развлечь мышей),
или другая свободно вращающаяся металлическая деталь, которая может проводить
электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний
ротор, в двигателе переменного тока вы посылаете мощность на внешние катушки, которые составляют
статор. Катушки запитываются попарно, последовательно,
создает магнитное поле, вращающееся вокруг двигателя.
Внутри статора находится цельная металлическая ось, проволочная петля,
катушка, беличья клетка из металлических стержней и межсоединений
(например, вращающиеся клетки, которым иногда удается развлечь мышей),
или другая свободно вращающаяся металлическая деталь, которая может проводить
электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний
ротор, в двигателе переменного тока вы посылаете мощность на внешние катушки, которые составляют
статор. Катушки запитываются попарно, последовательно,
создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда проще заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри
магнитное поле, является электрическим проводником. Магнитное поле постоянно меняется (потому что оно вращается), поэтому
согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит свое
собственное магнитное поле и, согласно другому закону электромагнетизма
(Закон Ленца) пытается остановить то, что вызывает это —
вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе
отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить
разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Магнитное поле постоянно меняется (потому что оно вращается), поэтому
согласно законам электромагнетизма (точнее, закону Фарадея), магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит свое
собственное магнитное поле и, согласно другому закону электромагнетизма
(Закон Ленца) пытается остановить то, что вызывает это —
вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе
отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить
разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа). Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки
катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
 Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки
катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки
катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока.Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и при отсутствии нагрузки на двигатель приближается к скорости вращающегося магнитного поля. На практике нагрузка на двигатель (независимо от того, что он ведет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и реальной скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вам необходимо увеличить или уменьшить частоту источника переменного тока, используя так называемый
частотно-регулируемый привод.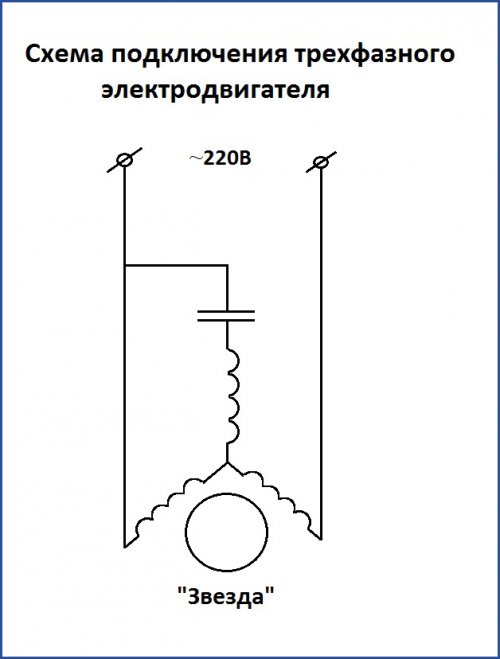 Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор.Количество отдельных электрических токов, возбуждающих питание катушек независимо, вне шага, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ). В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками.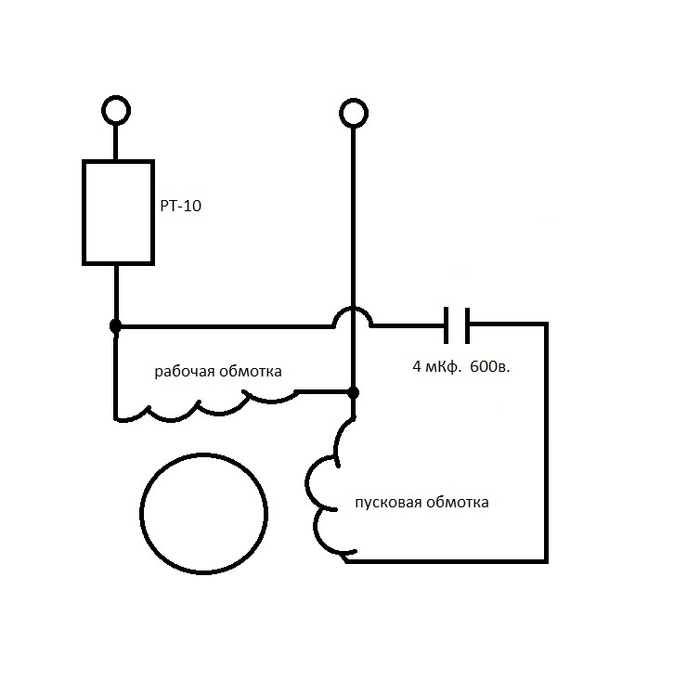 включается и выключается одновременно тремя отдельными противофазными токами.
включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: Трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота. У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и требуют замены время от времени.Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Произведение искусства: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу. Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения.Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения.Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего в действие, он вращается со скоростью
постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного проще контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный). Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный). Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, которые поочередно возбуждаются генератором справа.Это произведение взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в ссылках ниже.
Никола Тесла (1856–1943) был физиком.
и плодовитый изобретатель, чей огромный вклад в науку и технику
никогда не были полностью признаны.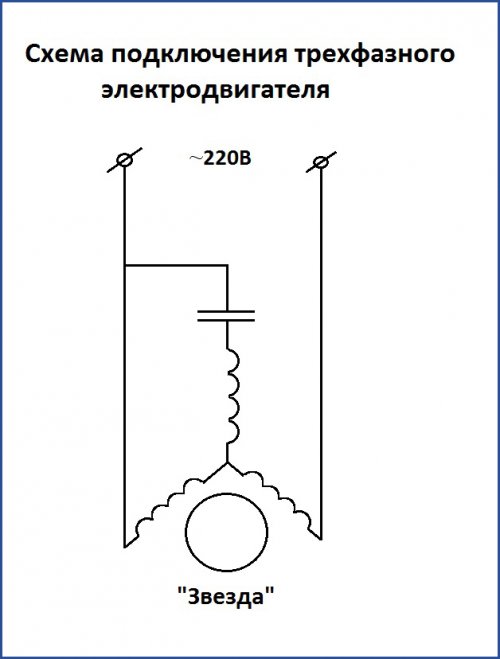 Приехав в Соединенные Штаты в возрасте 28 лет, он начал
работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин выпали
катастрофически и вскоре стали непримиримыми соперниками.Тесла твердо верил
что переменный ток (AC) намного превосходил постоянный ток (DC),
в то время как Эдисон думал обратное. Со своим партнером Джорджем
Westinghouse, Tesla отстаивал AC, а Эдисон был
полон решимости управлять миром на DC и придумал всевозможные
рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования
(изобретая электрический стул, чтобы доказать, что переменный ток может быть смертельным, и
даже ударил током слона Топси переменным током, чтобы показать, насколько это было смертельно опасно и жестоко). Битва между этими двумя
очень разные взгляды на электроэнергию иногда называют Войной течений.
Приехав в Соединенные Штаты в возрасте 28 лет, он начал
работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин выпали
катастрофически и вскоре стали непримиримыми соперниками.Тесла твердо верил
что переменный ток (AC) намного превосходил постоянный ток (DC),
в то время как Эдисон думал обратное. Со своим партнером Джорджем
Westinghouse, Tesla отстаивал AC, а Эдисон был
полон решимости управлять миром на DC и придумал всевозможные
рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования
(изобретая электрический стул, чтобы доказать, что переменный ток может быть смертельным, и
даже ударил током слона Топси переменным током, чтобы показать, насколько это было смертельно опасно и жестоко). Битва между этими двумя
очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть
мира. Во многом именно поэтому многие электродвигатели, которые
приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока
асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола
Тесла спроектировал его в 1880-х годах (его патент, показанный здесь, был выдан в мае 1888 года). Итальянский физик по имени
Галилео Феррарис независимо друг от друга высказал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем
Тесла и его имя теперь почти забыты.
Узнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электричество для молодых людей: забавные и легкие проекты «Сделай сам» Марка де Винка. Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, в том числе несколько занятий по созданию электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби.Enslow, 2011. Это отличное общее введение в электродвигатели с большим научным и технологическим контекстом. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей от 11 до 14 лет.
- Сила и энергия Криса Вудфорда. Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крисом Вудфордом, в изобретателях и изобретениях, том 5.Нью-Йорк: Маршалл Кавендиш, 2008. Краткая биография Теслы, которую я написал несколько лет назад. На момент написания все это было доступно в Интернете по этой ссылке Google Книги. Возраст 9–12 лет.
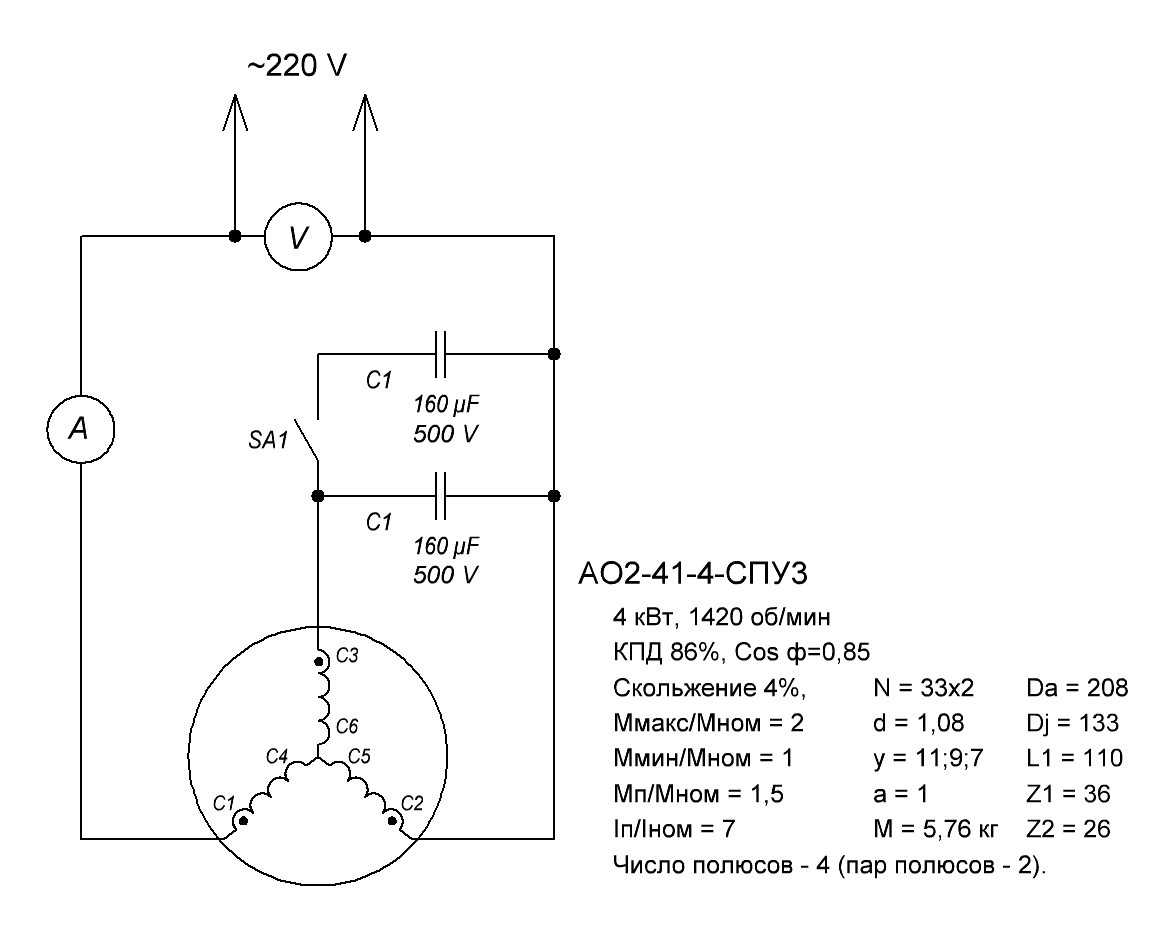
Патенты
Patents предлагает более глубокие технические детали и собственные идеи изобретателя о своей работе. Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г.Патент на оригинальный асинхронный двигатель переменного тока.
- Патент США 2 959 721: Многофазные асинхронные двигатели Томаса Х. Бартона и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Раймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г. Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом от Umesh C.Gupta, Vickers, Inc. 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
 Асинхронный двигатель с улучшенным контролем скорости.
Асинхронный двигатель с улучшенным контролем скорости.Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020.Все права защищены. Полное уведомление об авторских правах и условиях использования.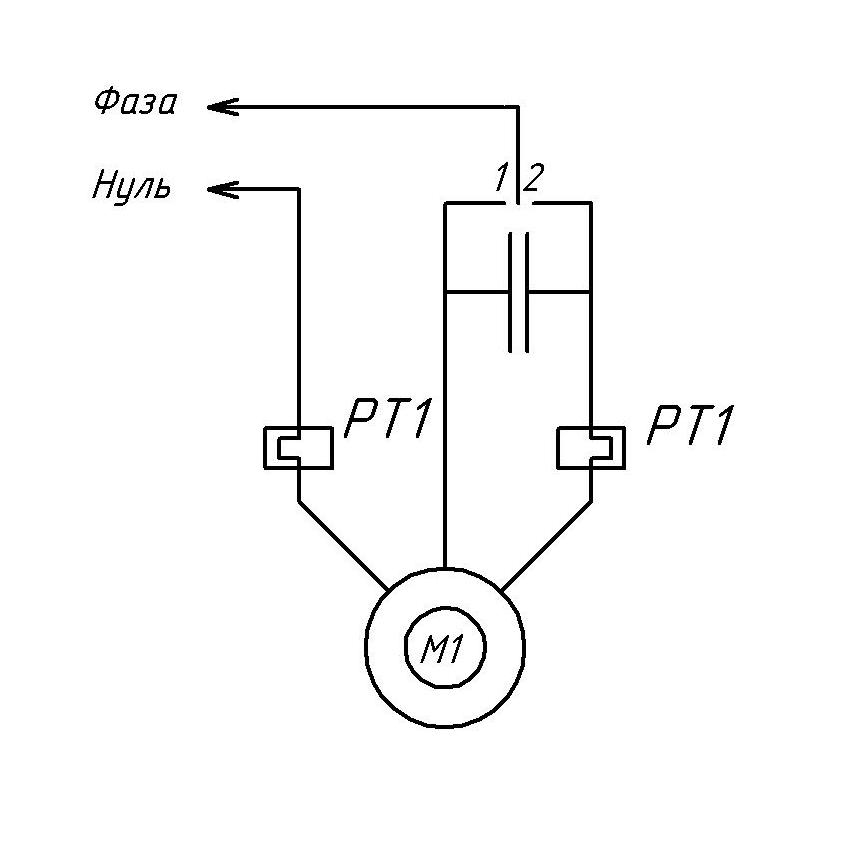
Подписывайтесь на нас
Поделиться страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом друзьям с помощью:
Цитировать эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html. [Доступ (укажите дату здесь)]
Больше на нашем сайте…
Show & Tell: асинхронные двигатели переменного тока
Двигатели переменного тока просты в управлении, надежны и экономичны для общего применения. По этим причинам они являются наиболее популярным типом электродвигателей в различных отраслях промышленности. В этом посте мы кратко представим асинхронные двигатели и продемонстрируем, как ими управлять.
Немного истории
Термин «индукция» в асинхронных двигателях (также известных как асинхронные двигатели) относится к электромагнитной индукции, которая является основной теорией работы асинхронных двигателей.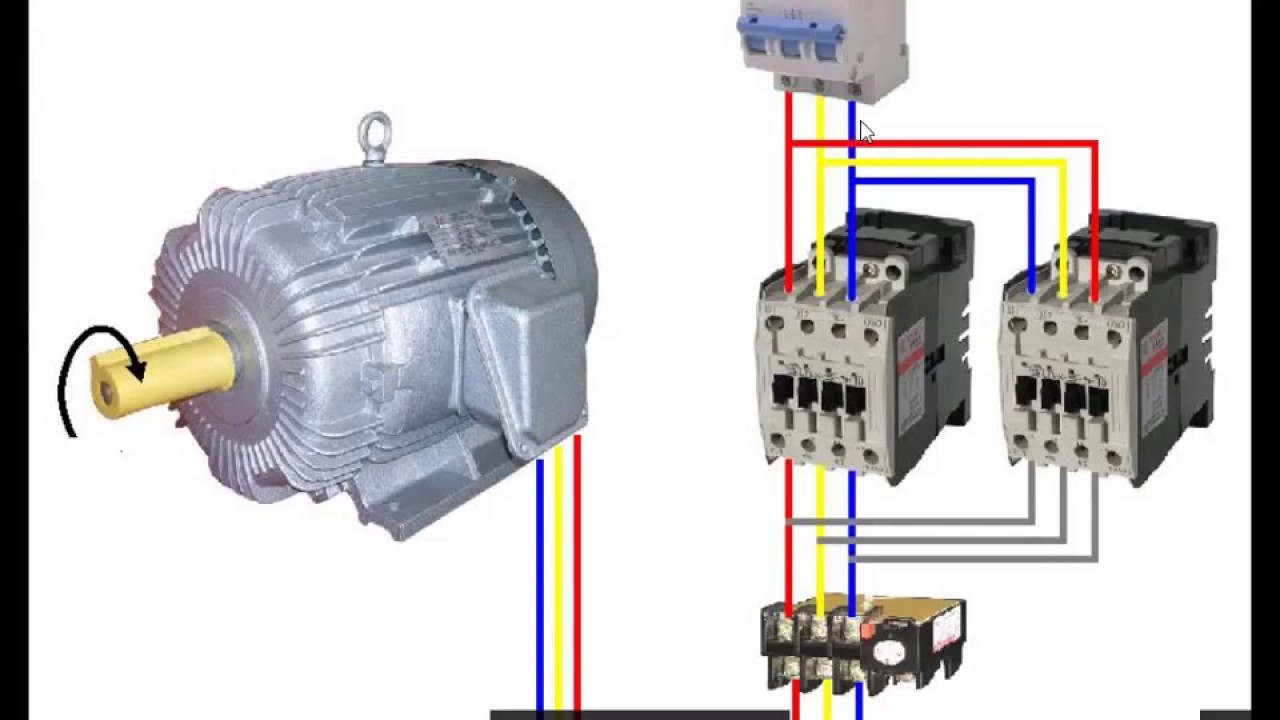 Я объясню это в следующем разделе. Согласно Википедии, с изобретением асинхронного двигателя переменного тока связано несколько имен. В 1824 году французский физик Франсуа Араго открыл вращающиеся магнитные поля и ввел термин «Вращения Араго» (или «Диск Араго»). В 1831 году Майкл Фарадей смог объяснить эффекты, представив теорию электромагнитной индукции. В 1879 году Уолтер Бейли продемонстрировал первый примитивный асинхронный двигатель, включив и выключив его вручную.Первые трехфазные асинхронные двигатели переменного тока без коммутатора были независимо изобретены Галилео Феррарисом в 1885 году и Николой Тесла в 1887 году. Оба опубликовали статьи в 1888 году, чтобы объяснить эти технологии. Тесла подал заявку на патенты в США в 1887 году и получил некоторые из этих патентов в 1888 году. Джордж Вестингауз, который в то время разрабатывал систему переменного тока, лицензировал патенты Теслы в 1888 году и приобрел опцион на патент США на концепцию асинхронного двигателя Феррариса, чтобы развивать технологию дальше.
Я объясню это в следующем разделе. Согласно Википедии, с изобретением асинхронного двигателя переменного тока связано несколько имен. В 1824 году французский физик Франсуа Араго открыл вращающиеся магнитные поля и ввел термин «Вращения Араго» (или «Диск Араго»). В 1831 году Майкл Фарадей смог объяснить эффекты, представив теорию электромагнитной индукции. В 1879 году Уолтер Бейли продемонстрировал первый примитивный асинхронный двигатель, включив и выключив его вручную.Первые трехфазные асинхронные двигатели переменного тока без коммутатора были независимо изобретены Галилео Феррарисом в 1885 году и Николой Тесла в 1887 году. Оба опубликовали статьи в 1888 году, чтобы объяснить эти технологии. Тесла подал заявку на патенты в США в 1887 году и получил некоторые из этих патентов в 1888 году. Джордж Вестингауз, который в то время разрабатывал систему переменного тока, лицензировал патенты Теслы в 1888 году и приобрел опцион на патент США на концепцию асинхронного двигателя Феррариса, чтобы развивать технологию дальше. General Electric (GE) начала разрабатывать трехфазные асинхронные двигатели в 1891 году. К 1896 году General Electric и Westinghouse подписали соглашение о перекрестном лицензировании конструкции ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором. Та же концепция используется и сегодня.
General Electric (GE) начала разрабатывать трехфазные асинхронные двигатели в 1891 году. К 1896 году General Electric и Westinghouse подписали соглашение о перекрестном лицензировании конструкции ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором. Та же концепция используется и сегодня.
| Асинхронные двигатели идеальны для приложений, требующих непрерывной работы в одном направлении , таких как конвейеры, миксеры и вращающиеся знаки. Они рассчитаны на длительный режим работы и обычно служат долгое время благодаря своей простой конструкции. |
Конструкция и теория эксплуатации
На этом изображении показана структура асинхронного двигателя переменного тока, который является основным типом двигателей переменного тока с постоянными разделенными конденсаторами. Вращающийся элемент, ротор, поддерживается в корпусе двигателя двумя шарикоподшипниками для длительного срока службы. Статор расположен вокруг ротора с тонким воздушным зазором. Выходной вал соединен с ротором. Выводные провода подсоединяются к обмоткам статора.Фланцевый кронштейн запрессован в корпус двигателя для обеспечения качества. Вращающийся элемент, ротор, поддерживается в корпусе двигателя двумя шарикоподшипниками для длительного срока службы. Статор расположен вокруг ротора с тонким воздушным зазором. Выходной вал соединен с ротором. Выводные провода подсоединяются к обмоткам статора.Фланцевый кронштейн запрессован в корпус двигателя для обеспечения качества. |
Поскольку переменный ток подается на медные обмотки статора, вокруг ротора создается вращающееся магнитное поле со скоростью колебаний переменного тока. Согласно правилу левой руки Флеминга, движущееся магнитное поле индуцирует ток на алюминиевых стержнях (проводнике) в стальном роторе, который генерирует свои собственные противоположные магнитные поля (закон Ленца). Магнитные поля от ротора затем взаимодействуют с вращающимся магнитным полем от статора, и ротор начинает вращаться.
Теория работы асинхронного двигателя переменного тока может быть объяснена с помощью диска Араго , который представляет собой наблюдаемое явление, включающее правило правой руки Флеминга и правило левой руки Флеминга. Хотите узнать больше о теории работы двигателей переменного тока? |
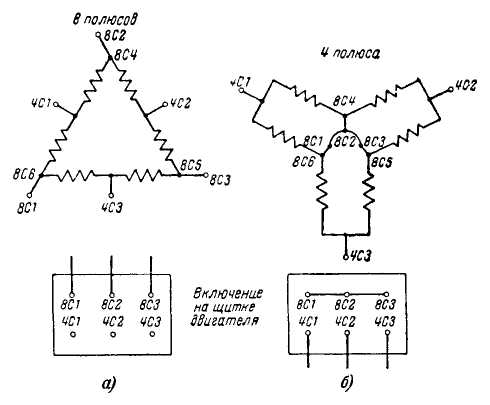
Однофазные асинхронные двигатели
Однофазные асинхронные двигатели предлагаются с различным напряжением и частотой для разных регионов мира.Для США однофазные двигатели обычно предлагаются на 110/115 вольт или 220/230 вольт, которые легко доступны. 60 Гц — типичная частота источника питания.
Вот действующие схемы подключения этих стандартных 3-проводных двигателей. FYI направление вращения двигателя указано, если смотреть со стороны выходного вала двигателя.
Хотя принцип работы должен быть одинаковым для всех однофазных двигателей переменного тока с постоянным разделенным конденсатором, представленных на рынке, цвета выводных проводов могут быть разными для разных производителей.
Для стандартного 3-проводного двигателя цвета проводов обычно белый, красный и черный. Черный всегда связан с нейтралью (N).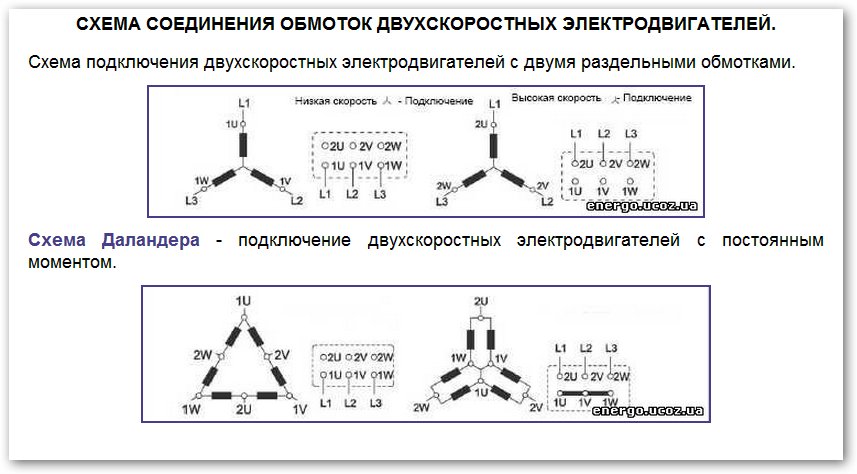 И белый, и черный подключены к 2 клеммам специального конденсатора. Когда ток (L) подключен к черному или красному через клемму конденсатора, двигатель начнет вращаться в заданном направлении. Для двигателей с клеммной коробкой принцип работы такой же. Однако клеммы обозначены Z2, U2 и U1.
И белый, и черный подключены к 2 клеммам специального конденсатора. Когда ток (L) подключен к черному или красному через клемму конденсатора, двигатель начнет вращаться в заданном направлении. Для двигателей с клеммной коробкой принцип работы такой же. Однако клеммы обозначены Z2, U2 и U1.
Подключение конденсатора
Для однофазных двигателей конденсатор критически важен для запуска.Без пускового момента, обеспечиваемого конденсатором, вам пришлось бы помогать запускать двигатель, вручную вращая вал. Это похоже на старые пропеллеры на старинном самолете. Убедитесь, что вы не забыли правильно подключить конденсатор. Это был очень распространенный случай устранения неполадок, когда я работал инженером службы поддержки.
Вот пример подключения 4-контактного конденсатора и однофазного двигателя.
Количество выводов на конденсаторе вас не смущает.На приведенной ниже схеме внутренней проводки показано, что две ближайшие клеммы имеют внутреннее соединение.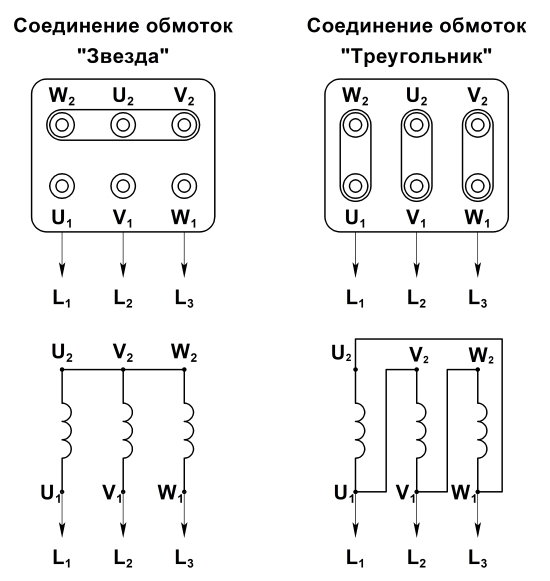 В электрическом отношении это то же самое, что и у традиционных конденсаторов с двумя выводами, которые имеют только по одному выводу с каждой стороны. В электрическом отношении это то же самое, что и у традиционных конденсаторов с двумя выводами, которые имеют только по одному выводу с каждой стороны. |
Мы также сняли видео, чтобы продемонстрировать правильный способ подключения этих двигателей, включая автоматические выключатели, переключатели и конденсатор.
Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели обычно предлагаются в США на 220/230 В и 50/60 Гц.В некоторых случаях предлагается 460 вольт. Трехфазные двигатели могут работать либо с постоянной скоростью, либо с инвертором / частотно-регулируемым приводом для приложений с регулируемой скоростью.
Вот действующие схемы подключения этих стандартных 3-проводных двигателей. FYI направление вращения двигателя указано, если смотреть со стороны выходного вала двигателя.
Для трехпроводного трехфазного двигателя у нас такие же цвета проводов. Три фазы от источника питания обозначены L1 (R), L2 (S) и L3 (T).Подключите красный к L1 (R), белый к L2 (S) и черный к L3 (T). Для двигателей с клеммной коробкой клеммы имеют маркировку U, V и W. Принцип действия такой же. Для переключения направления вращения переключите любое из 2 соединений между R, S и T.
Три фазы от источника питания обозначены L1 (R), L2 (S) и L3 (T).Подключите красный к L1 (R), белый к L2 (S) и черный к L3 (T). Для двигателей с клеммной коробкой клеммы имеют маркировку U, V и W. Принцип действия такой же. Для переключения направления вращения переключите любое из 2 соединений между R, S и T.
При перегрузке или блокировке вала рекомендуется использовать либо электромагнитный переключатель, либо электронную тепловую функцию инвертора, чтобы предотвратить перегорание двигателя.
Вы, наверное, обратили внимание, что на схеме подключения нет конденсатора .Для однофазных двигателей требуется конденсатор для создания многофазного источника питания. Для трехфазных двигателей конденсатор не требуется. Мы также сняли видео, чтобы продемонстрировать правильную проводку.
И последнее, но не менее важное. Не забудьте электрически заземлить двигатели с помощью специальной клеммы защитного заземления (PE), чтобы избежать удара или травм со стороны персонала.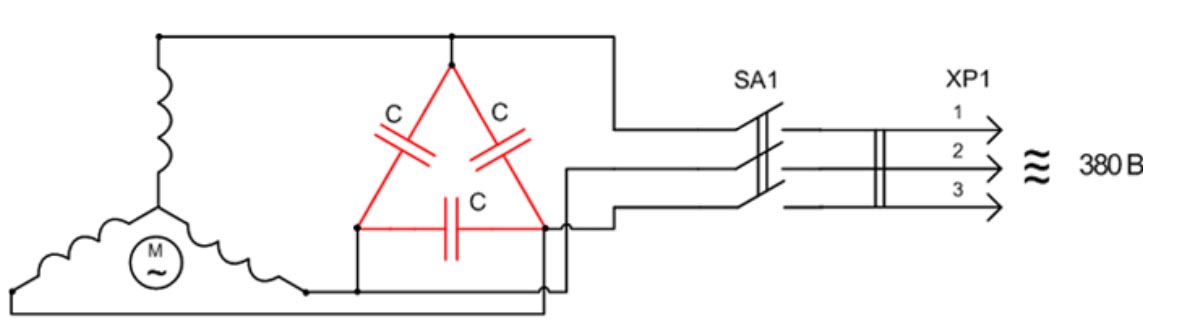 |
Это все, что нужно для подключения однофазных и трехфазных асинхронных двигателей.Следите за новостями в следующем посте, где я расскажу о подключении других типов двигателей переменного тока, таких как реверсивные двигатели и двигатели с электромагнитным тормозом.
Не забудьте подписаться!
Узнайте о серии KII и KIIS Вот видео, в котором кратко объясняется история разработки двигателей переменного тока Oriental Motor с 1966 года, когда серия K считалась фактическим стандартом для всех двигателей переменного тока, до введения серий KII и KIIS, которые являются новейшим стандартом одно- и трехфазные двигатели сегодня. |
Проскальзывание в электрических асинхронных двигателях
Асинхронный двигатель переменного тока состоит из статора и ротора, и взаимодействие токов, протекающих в стержнях ротора, и вращающегося магнитного поля в статоре создает крутящий момент. что крутит мотор. При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, позволяя стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент.
что крутит мотор. При нормальной работе с нагрузкой скорость ротора всегда отстает от скорости магнитного поля, позволяя стержням ротора разрезать магнитные силовые линии и создавать полезный крутящий момент.
Разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала составляет скольжение — измеряется в оборотах в минуту или частоте.
Скольжение увеличивается с увеличением нагрузки, обеспечивая больший крутящий момент.
Обычно скольжение выражается как отношение скорости вращения вала к скорости синхронного магнитного поля.
s = (n s — n a ) 100% / n s (1)
где
s = скольжение
n s = синхронная скорость магнитного поля (об / мин, об / мин)
n a = скорость вращения вала (об / мин, об / мин)
Когда ротор не вращается, скольжение 100% .
Пробуксовка при полной нагрузке варьируется от менее 1% для двигателей с высокой мощностью до более 5–6% для двигателей с малой мощностью.
| Размер двигателя (л. 2,5 1,7 | 0,8 | |
|---|
Число полюсов, частоты и скорость синхронного асинхронного двигателя
| No.магнитных полюсов | Частота (Гц) | |||
|---|---|---|---|---|
| 50 | 60 | |||
| 2 | 3000 | 3600 | ||
| 4 | 6 1500 6386 | 8 | 6 1500 6386 | 10001200 |
| 8 | 750 | 900 | ||
| 10 | 600 | 720 | ||
| 12 | 500 | 600 | 600 | 8 9064|
| 20 | 300 | 360 | ||
Скольжение и напряжение
Когда двигатель начинает вращаться, проскальзывание составляет 100% , а ток двигателя максимальный. Когда ротор начинает вращаться, скольжение и ток двигателя снижаются.
Когда ротор начинает вращаться, скольжение и ток двигателя снижаются.
Частота скольжения
Частота уменьшается при уменьшении скольжения.
Сопротивление скольжения и индуктивное сопротивление
Индуктивное реактивное сопротивление зависит от частоты и скольжения. Когда ротор не вращается, частота скольжения максимальна, как и индуктивное сопротивление.
Двигатель имеет сопротивление и индуктивность, и когда ротор вращается, индуктивное реактивное сопротивление низкое, а коэффициент мощности приближается к одному .
Скольжение и полное сопротивление ротора
Индуктивное реактивное сопротивление будет изменяться с проскальзыванием, поскольку полное сопротивление ротора является суммой фаз постоянного сопротивления и переменного индуктивного реактивного сопротивления.
Когда двигатель начинает вращаться, индуктивное реактивное сопротивление высокое, а полное сопротивление в основном индуктивное. Ротор имеет низкий коэффициент мощности.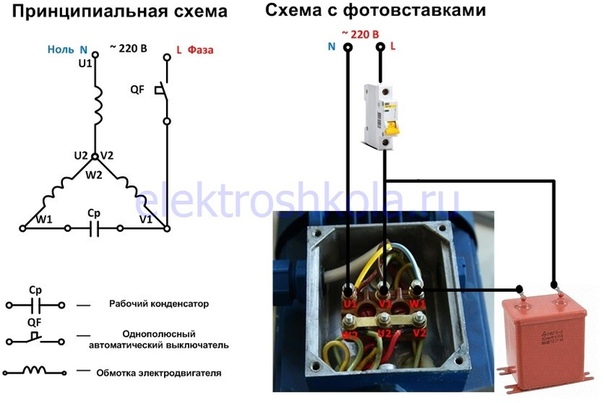 Когда скорость увеличивается, индуктивное реактивное сопротивление уменьшается до уровня сопротивления.
Когда скорость увеличивается, индуктивное реактивное сопротивление уменьшается до уровня сопротивления.
Классификация асинхронных двигателей
Электрические асинхронные двигатели предназначены для различных применений в отношении таких характеристик, как момент срабатывания, тяговый момент, скольжение и т. Д. — проверьте классификацию электрических асинхронных двигателей NEMA A, B, C и D.
Модель динамики трехфазной асинхронной машины, также известна как индукционная машина
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц). По умолчанию [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ом или pu) и индуктивность рассеяния
Lls (H или pu).По умолчанию [0,01965 0,0397] для
единицы о.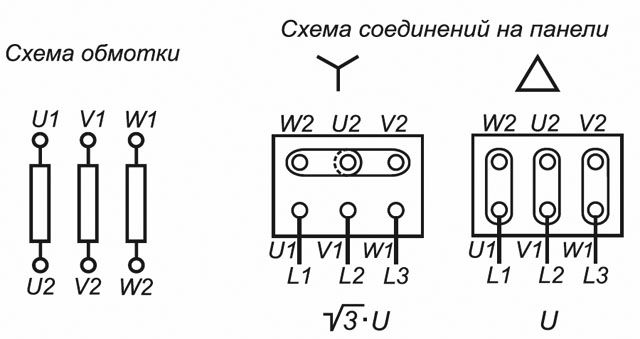 е. и
е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору. Этот параметр виден
только если параметр Тип ротора на вкладке Конфигурация установлено значение Wound или Squirrel-cage .
По умолчанию [0,01909 0.0397] для единиц о.у. и [0,6258
0,005473] для единиц СИ.
Сопротивление ротора Rr1 ‘(Ом или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только если параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . Дефолт
составляет [0,01909 0,0397] для единиц о.е. и [0,4155
0.002066] для единиц СИ.
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только если параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . Дефолт
составляет [0,01909 0,0397] для единиц о.е. и [0,4168
0,0003495] для единиц СИ.
Намагничивающая индуктивность Lm (H или pu).По умолчанию: 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.
Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F. w). По умолчанию
w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна единиц о.у. :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p.По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы), величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если параметр Тип ротора установлен на Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для о.у.
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора. железо моделируется или нет. По умолчанию очищен.
Определяет параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию: [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] для единиц о.